Robot Configuration and Communication Guide
Robot configuration and communication refers to establishing communication between the PickWiz vision software and the Robot/PLC (Programmable Logic Controller) through communication protocols, ensuring real-time and stable data transmission between the Robot/PLC and PickWiz.
PickWiz supports five communication methods: TCP Server, TCP Client, ModBus, Mitsubishi MC, and Siemens Snap7.
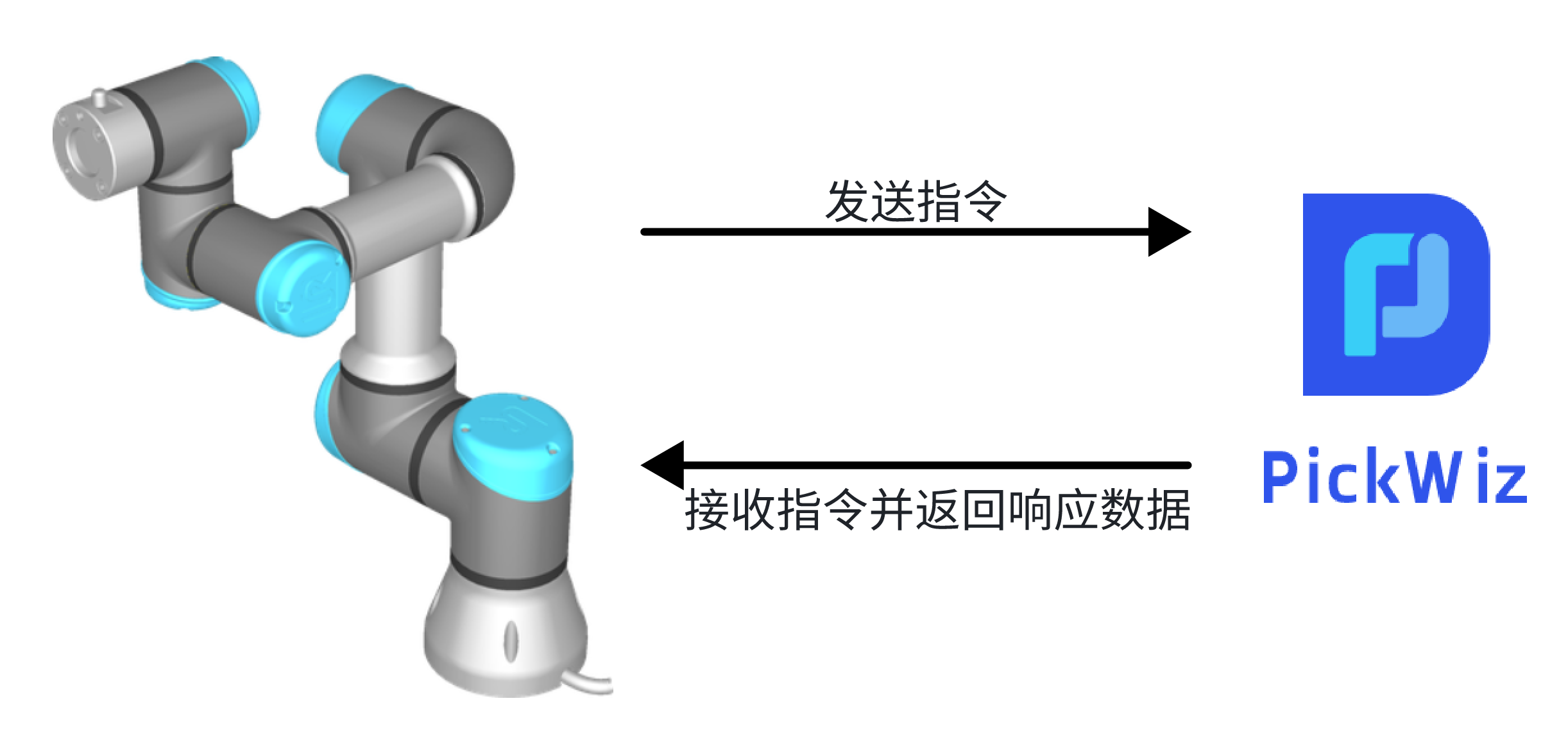
TCP Server is a communication method in which PickWiz acts as the TCP server and the Robot acts as the TCP client. When PickWiz communicates with the Robot, it does not actively control the Robot side. Instead, the Robot side sends TCP commands to PickWiz, and PickWiz returns response data after receiving the commands. Therefore, when using TCP communication, users need to write programs on the Robot side to communicate with PickWiz.
For details, refer to: TCP Server Communication Configuration
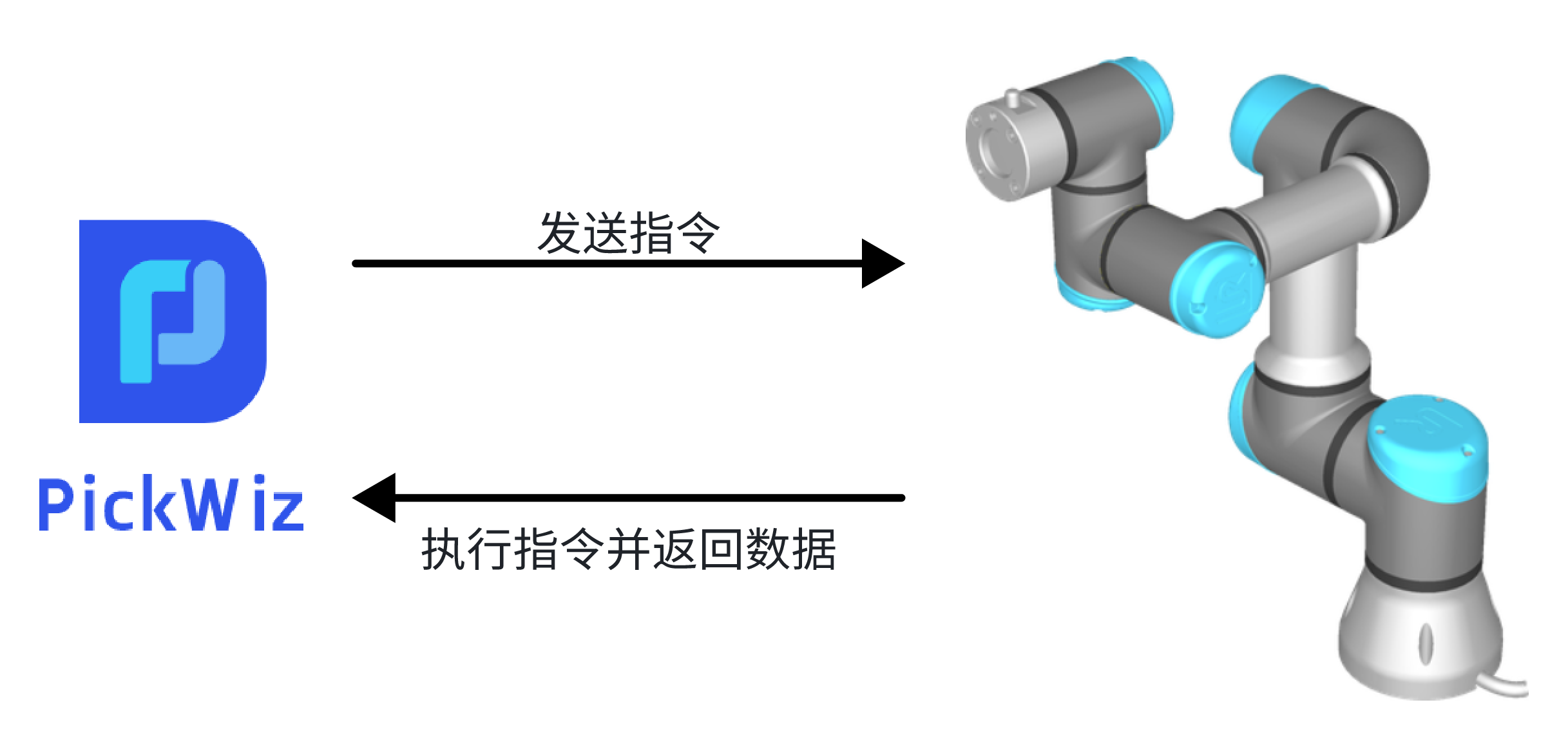
TCP Client, ModBus, Mitsubishi MC, and Siemens Snap7 are communication methods in which PickWiz acts as the client and the Robot acts as the server. When PickWiz communicates with the Robot, it actively controls the Robot and sends commands to it. After receiving the commands, the Robot executes them and returns data.
For details, refer to:
TCP Client Communication Configuration
ModBus Communication Configuration
Before configuring Robot communication, first import the Robot communication program and related configuration files into the Robot/PLC system, then use an Ethernet cable to connect the industrial PC and the Robot/PLC, and confirm that the Robot/PLC and the industrial PC are on the same IP subnet.
For the Robot/PLC brands currently supported by PickWiz, refer to: Robot Standard Program Documentation