Eye-Hand Calibration Operation Guide
“Hand” refers to the Robot, and “eye” refers to the 3D Camera. eye-hand calibration is used to determine the correspondence between the camera coordinate system and the robot coordinate system, helping PickWiz accurately convert pose information in the camera coordinate system into the spatial coordinates required for Robot motion and enabling accurate vision-guided picking and placing.
The eye-hand calibration workflow is as follows:

Pre-calibration preparation: prepare the materials and conditions required for eye-hand calibration;
Calibration information configuration: select the eye-hand calibration configuration based on the camera mounting method, calibration method, and other factors;
Pre-calibration inspection: check whether the Robot, Calibration Board, and other items have been installed and meet the calibration requirements;
Collect samples: take photos to collect Calibration Board samples;
Calibration result inspection and analysis: inspect and analyze the results to determine whether the calibration accuracy meets actual requirements;
Select a calibration configuration: select the corresponding calibration configuration for the task scenario.
Please refer to this operation guide to perform eye-hand calibration for the Camera and Robot. In addition, eye-hand calibration must be performed again after any of the following situations occur:
A positional change occurs between the Camera and the Robot base (EyeToHand) or between the Camera and the Robot end Flange (EyeInHand);
Replace the Camera with another one;
Replace the Robot with another one.
1. Pre-calibration Preparation
Before eye-hand calibration, the following preparatory work must be completed:
(1) Complete the hardware setup of the 3D Vision Guidance Kit
Please first complete the installation and connection of the Robot, Camera, and industrial PC
(2) Create a Project and a task
Please refer to Project Operation Guide and Task Operation Guide to create a Project and a task that meet the actual scenario requirements.
(3) Complete Camera connection and parameter tuning
Please refer to Camera Connection and Parameter Tuning Guide to connect the Camera, perform camera imaging quality adjustment, and verify Camera accuracy.
(4) Complete Robot communication configuration
Please refer to Robot Configuration and Communication Operation Guide to establish communication between the Robot and PickWiz
(5) Prepare the materials required for calibration
Please ensure that the Calibration Board is flat and clear, with no obvious scratches or dirt, and no bending or deformation
If the Camera is installed outside the robot arm, the Calibration Board needs to be installed on the robot Tool. Please ensure that the Calibration Board is securely installed and located within the Camera field of view.
First install the Calibration Board connector on the robot end Flange, and then install the Calibration Board on the connector. If a non-removable gripper is installed on the robot end Flange, the Calibration Board can be installed directly on the gripper.
If the calibration method uses pin tool contact-point calibration, please ensure that the shape of the pin tip is intact and not deformed. The pin tool needs to be installed on the Robot, either on the robot end Flange or on the gripper.
2. Calibration Information Configuration
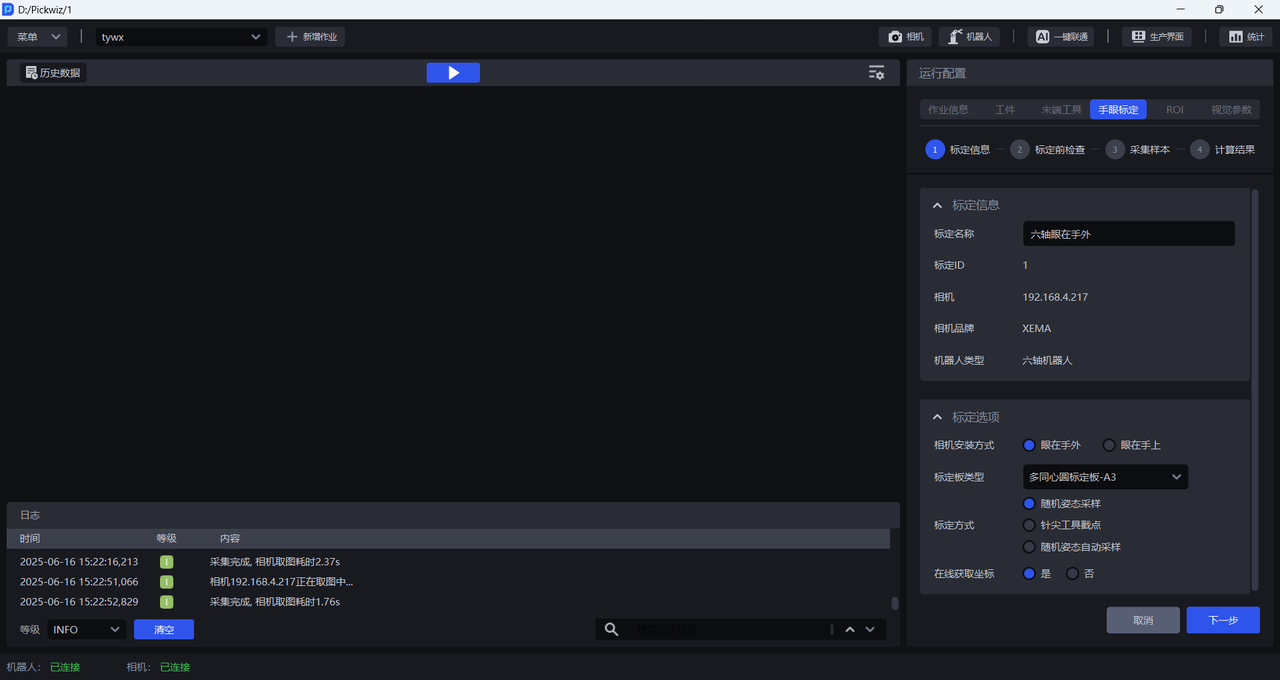
Calibration Namecan be used to name the current calibration configurationCalibration IDis used by the Robot to switch calibration configurationsCamerais the IP address of the currently connected CameraCamera Brandis the brand of the currently connected CameraRobot Typemust be consistent with the robot type in Robot Configuration
Eye-hand calibration must determine the precise position and orientation of the Camera in the robot coordinate system. Therefore, the Camera type, Camera mounting method, Robot type, and data collection method all affect the specific calibration method and workflow.
Before collecting samples, you must configure Camera Mounting Method, Calibration Board Type, Calibration Method, and Obtain Coordinates Online. After the eye-hand calibration configuration is completed, it can no longer be modified. If the configuration is incorrect, delete the calibration and create a new one.
2.1 Camera Mounting Method
- Eye in hand (EyeInHand): The Camera is fixed on the end Tool of the robot arm and moves together with the robot arm. The Camera is fixed relative to the robot end Flange, and the Calibration Board is fixed relative to the Robot base.

If the Camera is fixed on the end Tool of the robot arm and the Robot type is a three-axis Robot, please refer to Eye-in-Hand Calibration for Three-Axis Robots
If the Camera is fixed on the end Tool of the robot arm and the Robot type is a four-axis Robot, please refer to Eye-in-Hand Calibration for Four-Axis Robots
If the Camera is fixed on the end Tool of the robot arm and the Robot type is a six-axis Robot, please refer to Eye-in-Hand Calibration for Six-Axis Robots
- Eye to hand (EyeToHand): The Camera is fixed outside the robot arm and does not move with the robot arm. The Camera is fixed relative to the Robot base, and the Calibration Board is fixed relative to the robot end Flange.

If the Camera is fixed outside the robot arm and the Robot type is a three-axis Robot, please refer to Eye-to-Hand Calibration for Three-Axis Robots
If the Camera is fixed outside the robot arm and the Robot type is a four-axis Robot, please refer to Eye-to-Hand Calibration for Four-Axis Robots
If the Camera is fixed outside the robot arm and the Robot type is a six-axis Robot, please refer to Eye-to-Hand Calibration for Six-Axis Robots
2.2 Calibration Board Type
Selecting an appropriate Calibration Board affects the ease of use of the calibration process and the accuracy of the calibration results, and is one of the keys to successful eye-hand calibration. Dexforce currently provides the following Calibration Boards, and the Calibration Board drawings can be downloaded and printed.
| Robot Type | Recommended Working Distance | Recommended Calibration Board |
|---|---|---|
| 6-axis Robot | Under 0.5 m | A6 Multi-Concentric-Circle Calibration Board |
| Under 1.5 m | A5 Multi-Concentric-Circle Calibration Board | |
| 1.5 m -- 2.5 m | A4 Multi-Concentric-Circle Calibration Board | |
| Above 2.5 m | A3 Multi-Concentric-Circle Calibration Board | |
| 3-axis/4-axis Robot | Under 0.5 m | A6 Multi-Concentric-Circle Calibration Board |
| Under 1.5 m | A5 Multi-Concentric-Circle Calibration Board | |
| 1.5 m -- 2.5 m | A4 Multi-Concentric-Circle Calibration Board | |
| Above 2.5 m | A3 Multi-Concentric-Circle Calibration Board |
2.3 Calibration Method
Random pose sampling calibration: randomly move the robot end Tool, collect Calibration Board samples at multiple positions, identify the feature points on the Calibration Board, and collect random poses of the end Tool.
Pin tool contact-point calibration: install the pin tool on the robot end Flange, place the Calibration Board on the work platform, keep the pin tool vertical to the Calibration Board, and have the pin tool touch different circular points on the Calibration Board.
Pin tool contact-point calibration is suitable for situations where the Robot operating space is constrained or the Calibration Board cannot be installed. This method is recommended for 3-axis and 4-axis Robots.
- Automatic random pose sampling: compared with "random pose sampling", this calibration method supports setting a movement range. The system automatically calculates random movement points within the range, and then the Robot moves according to those points to collect Calibration Board samples at multiple positions, identify the feature points on the Calibration Board, and collect random poses of the end Tool. This calibration process is faster and simpler to interact with.
2.4 Get Coordinates Online
If the Robot has the corresponding calibration program, when sampling the Calibration Board the Robot runs the calibration program and automatically sends the pose to PickWiz, so
Get Coordinates Onlineshould be set toYes. If you need to write the calibration program yourself, please refer to Robot Program CollectionIf the Robot does not have the corresponding calibration program, then when sampling the Calibration Board you need to manually enter the pose of the robot end Tool, and
Get Coordinates Onlineshould be set toNo.
3. Pre-calibration Inspection
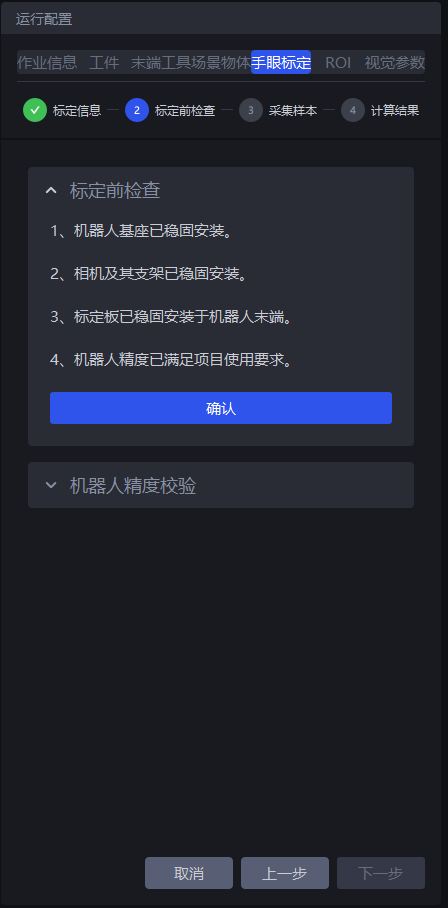
- Ensure that the Robot base has been securely installed
Before performing eye-hand calibration, the installation of the Robot base should be carefully checked. If the Robot base is not securely installed, the Robot will visibly shake during movement, affecting robot accuracy and thereby affecting the calibration result.
Follow the steps below to check whether the installation of the Robot base meets the requirements:
First, the surface on which the Robot base is installed must be flat and kept clean;
Second, control the Robot to perform large-range translation or rotation at 100% speed, and observe whether there are signs of Robot shaking. If there is shaking, readjust and secure the Robot base to ensure that no displacement, tilting, or other issues occur while the Robot is moving;
Third, check whether the Robot body and the base are tightly connected, and tighten the screws to prevent loosening.
- Ensure that the Camera and its bracket have been securely installed
Before performing eye-hand calibration, the installation of the Camera and its bracket should be carefully checked. If the Camera and its bracket are not securely installed, the camera imaging quality will be affected, thereby affecting the calibration result.
Follow the steps below to check whether the installation of the Camera and its bracket meets the requirements:
First, check whether the Camera bracket is a machined part. Aluminum profile material should be avoided for the bracket;
Second, manually shake the bracket and observe whether there is obvious shaking. If there is shaking, readjust and secure the bracket;
Third, move the sliding parts on the bracket and observe whether there is obvious shaking. At the same time, test the repeat positioning accuracy to ensure that the repeat positioning accuracy meets the actual scenario requirements;
Fourth, shake the Camera and observe whether there is obvious shaking to ensure that the Camera is securely installed.
- Ensure that the Calibration Board is installed in place
If the camera mounting method is Eye to hand, with the Camera fixedly installed outside the robot arm, the Calibration Board should be installed on the end of the Robot. Shake the Calibration Board and check whether there is obvious shaking. If there is shaking, tighten the screws and readjust to secure the Calibration Board.
If the camera mounting method is Eye in hand, with the Camera fixedly installed on the end Tool of the robot arm, there is no need to install the Calibration Board. The Calibration Board should be placed flat on the work surface, while ensuring that it is within the Camera field of view and covers the area where the workpiece is located.
If the calibration method is pin tool contact-point calibration, the Calibration Board should be fixed on the work platform to prevent the Calibration Board from shifting when the pin tool touches points on the Calibration Board.
- Ensure that robot accuracy already meets the project usage requirements
If robot accuracy does not meet the project usage requirements, please refer to Calibration Verification to correct robot accuracy.
4. Collect Samples
Select different calibration workflows according to the Camera mounting method and Robot type.
| Camera Mount | Robot Type | Calibration Process |
|---|---|---|
| Eye in hand | Three-axis Robot | Eye in hand Three-axis Robot Calibration |
| Eye in hand | Four-axis Robot | Eye in hand Four-axis Robot Calibration |
| Eye in hand | Six-axis Robot | Eye in hand Six-axis Robot Calibration |
| Eye to hand | Three-axis Robot | Eye to hand Three-axis Robot Calibration |
| Eye to hand | Four-axis Robot | Eye to hand Four-axis Robot Calibration |
| Eye to hand | Six-axis Robot | Eye to hand Six-axis Robot Calibration |
5. Calibration Result Inspection and Analysis
The accuracy of eye-hand calibration results is one of the key factors affecting Robot picking accuracy. Therefore, after calibration is completed, the calibration results must be inspected to determine whether the accuracy meets the actual scenario requirements. If Calibration Error exceeds the normal range, the cause of the error must be identified. Please refer to Calibration Result Inspection and Analysis to analyze the calibration results, resolve the issue, and inspect again until the calibration accuracy meets the scenario requirements.
6. Select a Calibration Configuration
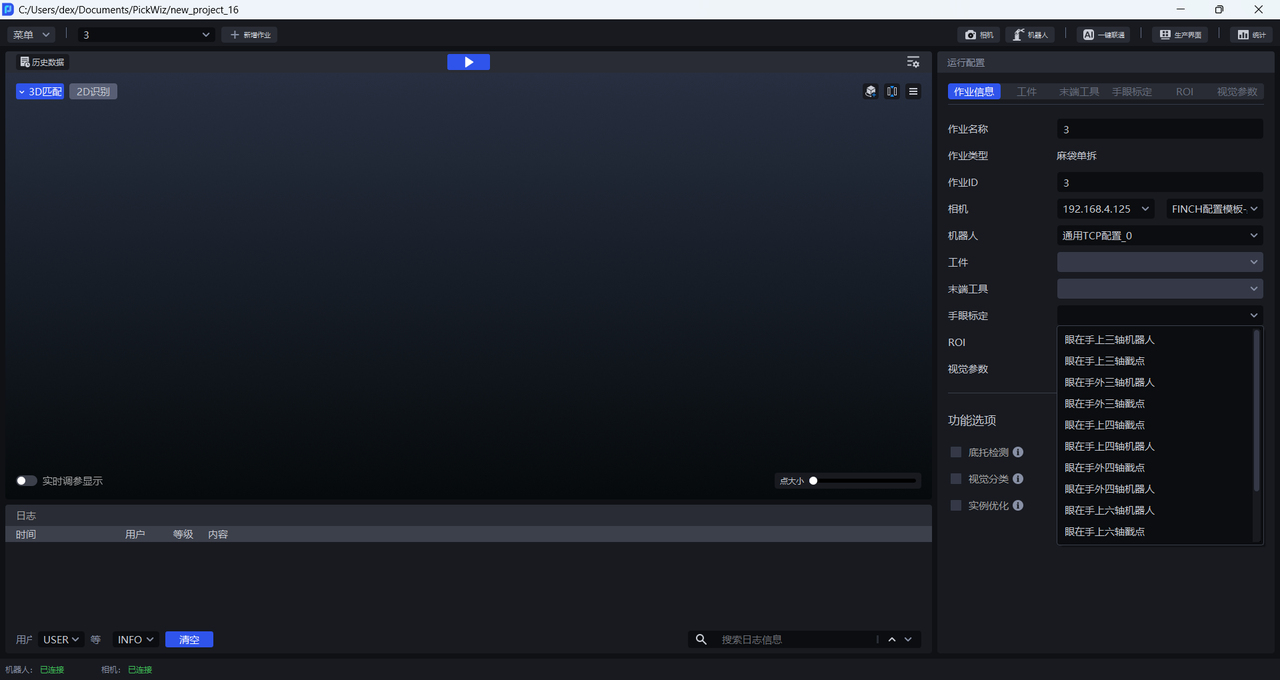
After the calibration workflow is completed, return to the Run Configuration interface, click Job Information, click the drop-down box for Eye-Hand Calibration, and select the corresponding eye-hand calibration configuration.
7. Appendix
7.1 Terms and Concepts
Intrinsic Parameter: Camera intrinsic parameters are the basic internal parameters of the Camera, including lens focal length, principal point coordinates, distortion coefficients, and so on, reflecting the internal imaging characteristics of the Camera. Among them, focal length represents the optical characteristics of the Camera lens, principal point coordinates are the center position of the 2D image, and distortion coefficients are used to correct various distortions generated during camera imaging. The camera Intrinsic Parameter is used to describe the relationship between the pixel coordinate system and the camera coordinate system. Generally, the Intrinsic Parameter is calibrated before the Camera leaves the factory and is stored inside the Camera.
Extrinsic Parameter: Camera extrinsic parameters reflect the position and orientation of the Camera in external space, including the rotation matrix and translation vector. The rotation matrix describes the rotational relationship of the camera coordinate system relative to the world coordinate system. It consists of three rotation angles (such as the rotation angles around the x, y, and z axes) and is used to represent the pose of the Camera. The translation vector represents the position of the origin of the camera coordinate system in the world coordinate system. The camera Extrinsic Parameter is used to describe the relationship between the camera coordinate system and the world coordinate system. It changes with the position and pose of the Camera, so the camera Extrinsic Parameter needs to be recalibrated for each shooting condition.
Camera Accuracy: Refers to the calibration accuracy of the Camera, that is, how close the Camera's measurement results are to the true values in actual use. Higher camera accuracy means that the Camera can capture and measure the pose of an object more accurately. Camera accuracy is affected by many factors, including the hardware quality of the Camera (such as lens quality and image sensor performance), the accuracy of the calibration method, the usage environment (such as lighting conditions, temperature, and humidity), and the installation and commissioning status of the Camera.
eye-hand calibration: The relative pose between the Robot and the Camera is not fixed in different usage scenarios, so calibration must be performed on the work site to obtain the eye-hand relationship between the Camera and the Robot.
Calibration Method: The method used to collect Calibration Board samples. It is divided into random pose sampling calibration and pin tool contact-point calibration, both of which are manual calibration methods.
Camera Mounting Method: The mounting method of the Camera in the vision-guided kit. It is divided into Eye in hand and Eye to hand.
Calibration Point: Refers to the Robot pose when the Camera collects Calibration Board samples during the calibration process. In random pose sampling calibration, the Calibration Point is the pose of the center of the robot Flange at each sampling. In pin tool contact-point calibration, the Calibration Point is the pose of the pin tip at each sampling.
Feature Point: Refers to the center of the concentric circles on the Calibration Board. During calibration, the software calculates the pixel coordinates of the Calibration Circle center and the coordinates of the circle center in the camera coordinate system from the collected Calibration Board images (2D images and depth images). It then calculates the camera Extrinsic Parameter based on the collected Calibration Circle data.
Point Cloud Error (Average Distance): Indicates point cloud fluctuation. If the point cloud error (average distance) is greater than 0.002, it means the point cloud fluctuation is too large.
Reprojection Pixel Error: Indicates the distortion coefficient of the camera Intrinsic Parameter. If the reprojection pixel error is greater than 0.1, it means the distortion coefficient of the camera Intrinsic Parameter is too large.
Rotation Freedom: Indicates how uniformly the current sample and the collected samples are distributed in rotational space,