3D Vision Guided Kit Hardware Setup
The 3D vision guided kit is Dexforce's self-developed complete solution that includes hardware (cameras and IPC), software (3D vision guidance software), and AI algorithms, and is designed to address various typical 3D vision guidance scenarios. This article introduces the installation methods and connection methods for the hardware (cameras, robots, and IPC).
1. Hardware Overview
The hardware of the 3D vision guided kit mainly includes robots, cameras, and an IPC, as shown below:

Robot
A robot is a programmable mechanical device with a certain degree of autonomy that can perform tasks such as movement, manipulation, or positioning. It executes tasks according to the output of the vision system.
A robot unit typically consists of the robot body, a control cabinet, and a teach pendant.
In industrial applications that require a high degree of automation, a PLC (Programmable Logic Controller) may be used to control robot motion and operations. For more advanced control and monitoring, a host computer may also be used for more complex robot Programming and control, such as Path Planning, task scheduling, and motion control.
Camera
The Camera refers to Dexforce's self-developed 3D industrial camera, which is used to capture images and positional information of objects.
IPC
This refers to the computing device that provides the runtime environment for Dexforce.
You can use the IPC provided by Dexforce (recommended), or use your own equipment as the IPC. For more information about IPCs, refer to IPC Configuration Guide.
2. Camera Installation and Connection
2.1 Unboxing Inspection
After receiving the camera package, please confirm that the packaging box is intact and undamaged.
The following images show examples of the items and accessories included in the camera package for reference only. Please refer to the actual contract.



| Category | Name | Function |
|---|---|---|
| Camera Component | 3D Camera | Capture images |
| Camera Component | Standard Gigabit Ethernet Cable | Connect the camera and transmit data |
| Camera Component | Standard Power Cable | Connect the camera and supply power to it |
| Camera Component | Matching Calibration Board | Parameter inspection and Extrinsic Parameter correction |
If any items are damaged or missing, please contact Dexforce.
2.2 Connect the Camera to the IPC
(1)Choose a suitable camera bracket, use the camera connector to secure the camera to the bracket, and remove the lens protective film after the camera is installed.
Drawing of the camera connector (black sheet metal part): Drawing.STEP
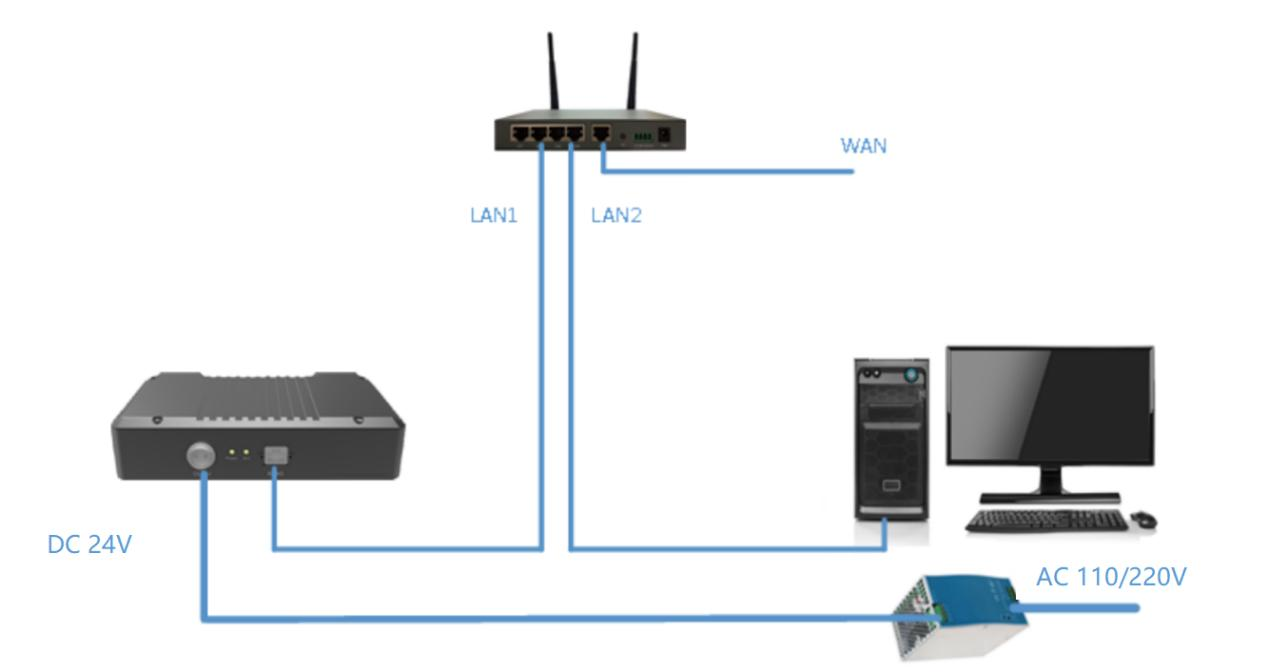
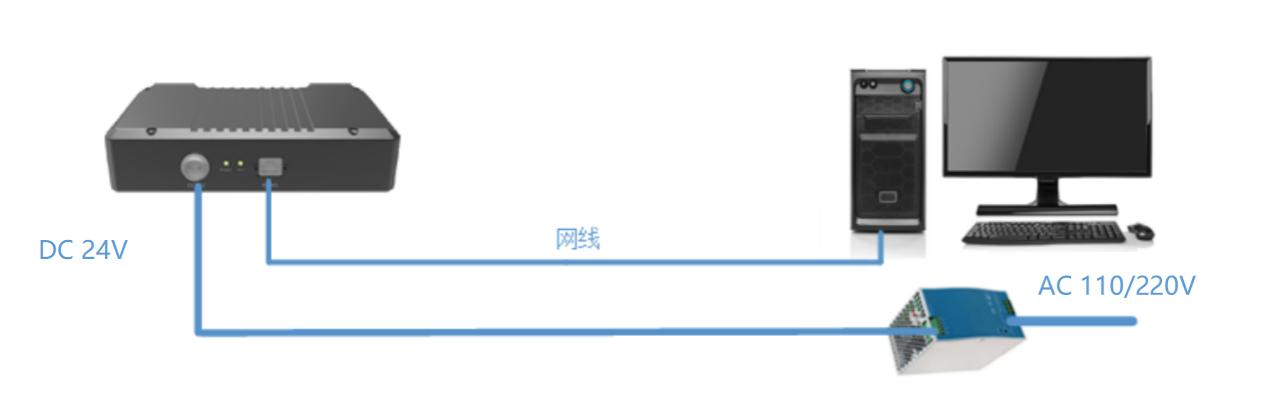
(2)Connect the Ethernet cable, with one end connected to the camera and the other end connected directly to the IPC or routed through a Router.
(3)Connect the power supply, plugging one end directly into the camera power interface and the other end into a 220v power source.
The following is a schematic diagram of the camera wiring.
2.3 Connect the Camera to PickWiz
Please refer to Camera Connection and Parameter Adjustment Guide
3. Robot Installation and Connection
3.1 Robot Installation
(1)Connect the robot arm body to the robot control cabinet
Connect the robot arm body to the control cabinet with the Cable, aligning the direction and inserting it slowly during connection.
(2)Connect the robot teach pendant to the control cabinet
Insert the teach pendant cable into the control cabinet port, then place the teach pendant directly above the control cabinet.
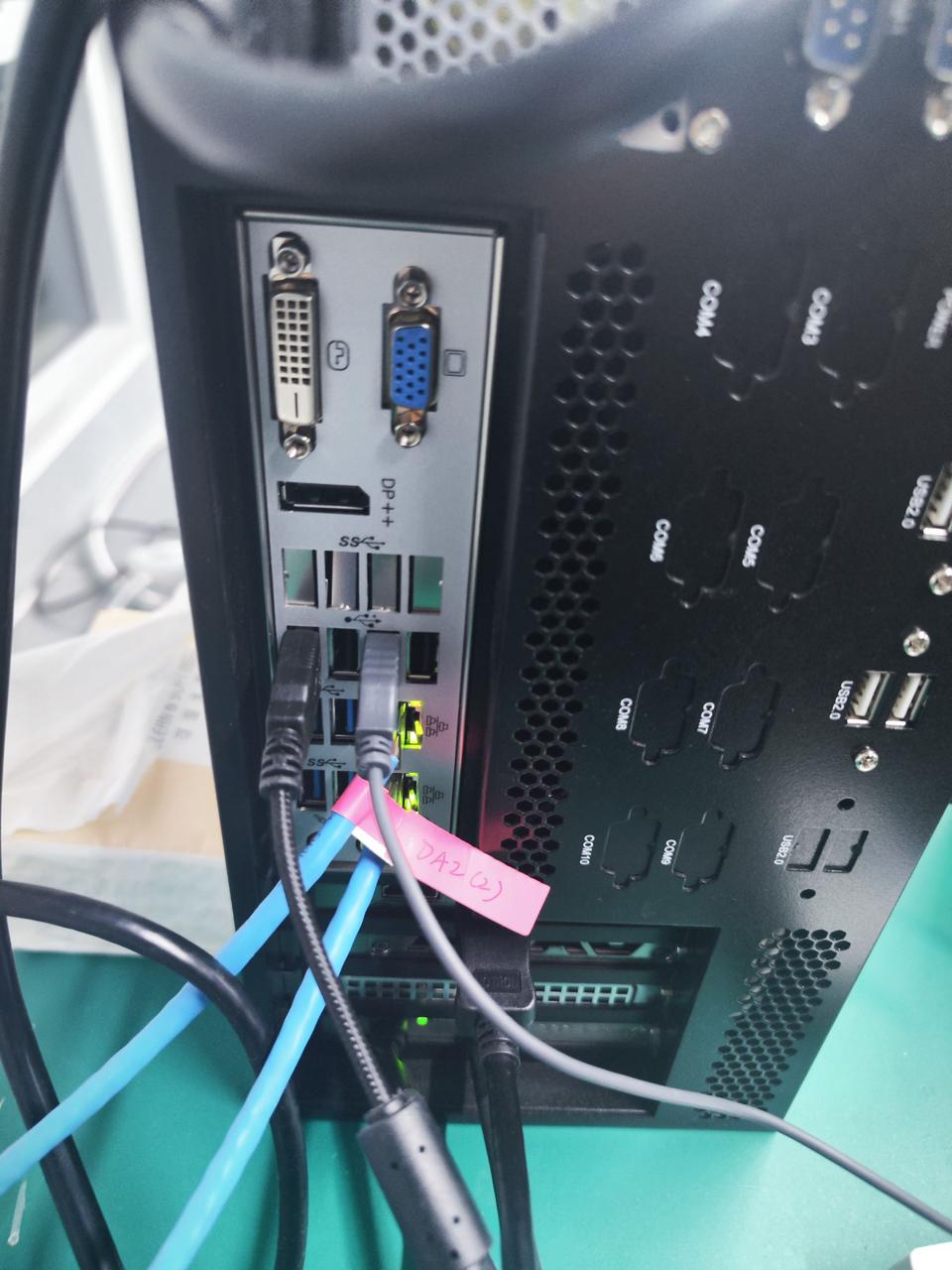
(3)Use an Ethernet cable to connect the robot control cabinet and the IPC, as shown below.

(4)Power on the control cabinet
After the control cabinet is powered on, turn on the teach pendant to put the robot into working status
3.2 Check the Robot System Environment
Teach pendant connection status
Connection status of the control cabinet network port and the IPC Ethernet cable
Whether the network segments are the same
Whether the TCP network communication package is enabled
Robot system version

3.3 Connect the Robot to PickWiz
(1)Please refer to Robot Configuration and Communication Guide to connect the robot and PickWiz for communication
3.4 Communication Test
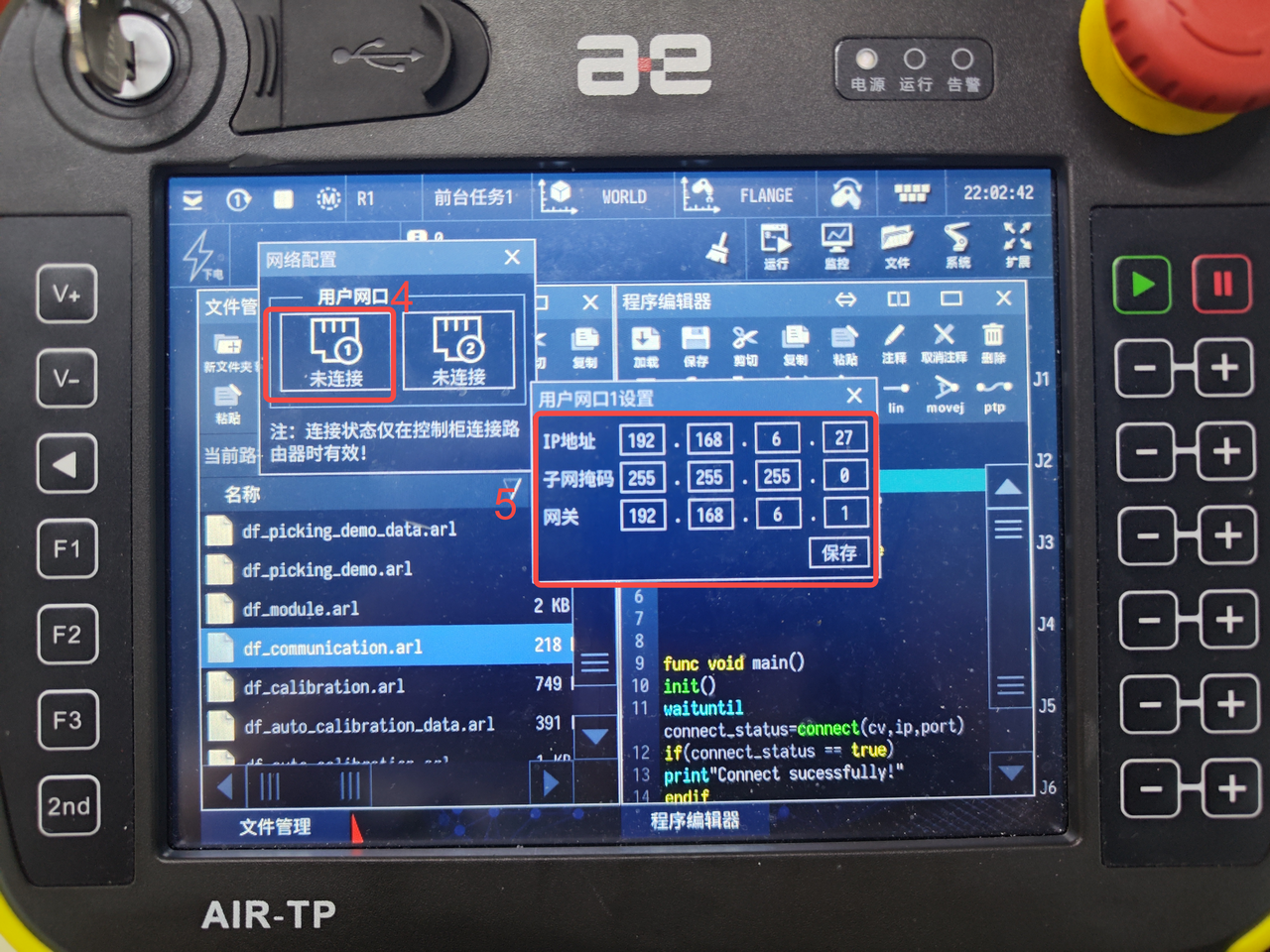
(1)Switch the program and select the communication test file df_communication.arl
(2)Modify the IP and port of the global variables at the top of the program to match the IPC
(3)Run step by step / continuously
(4)Check PickWiz. When the program runs to the connect function, the robot arm icon shows connected; when it runs to close the connection, the icon shows disconnected
(5)Check the teach pendant for the message “Connect sucessfully!”
