Repeated Positioning Accuracy Operation Guide
In PickWiz, repeated positioning accuracy refers to the consistency error calculation of the vision recognition system when recognizing the position of the same object multiple times. It can be used to troubleshoot the stability of vision system recognition. Influencing factors include Camera accuracy and vision recognition accuracy.
1. Calculate repeated positioning accuracy using Camera data
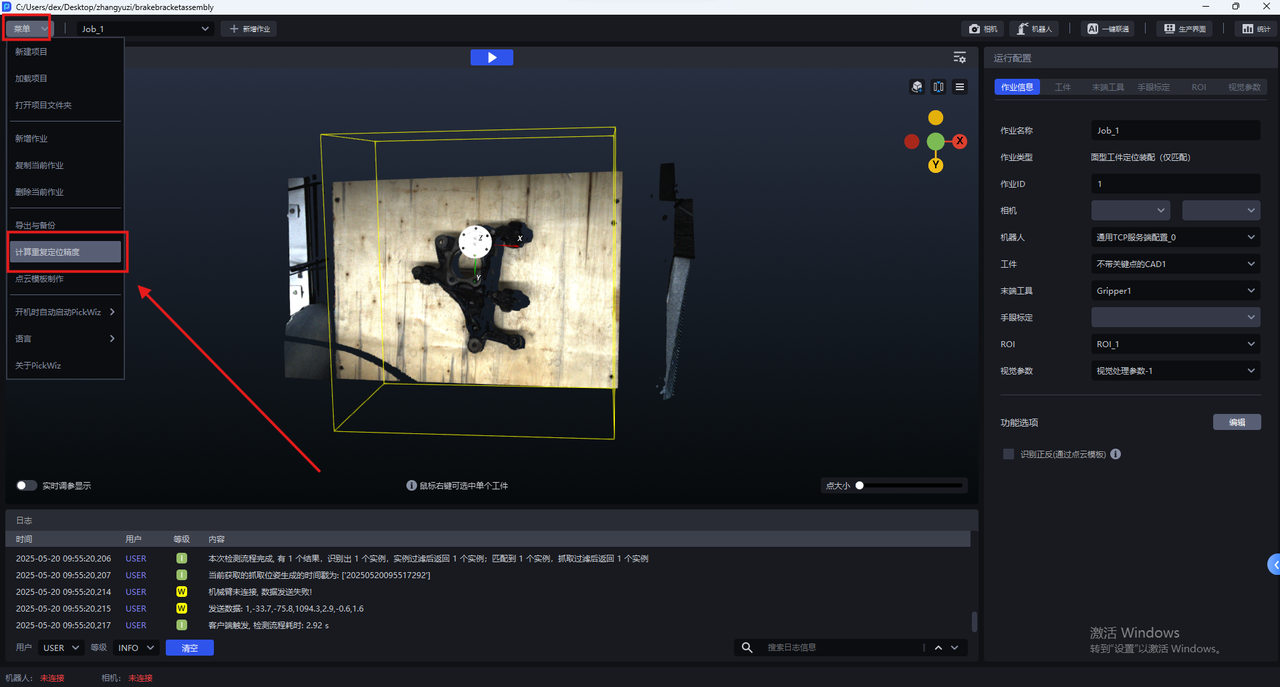
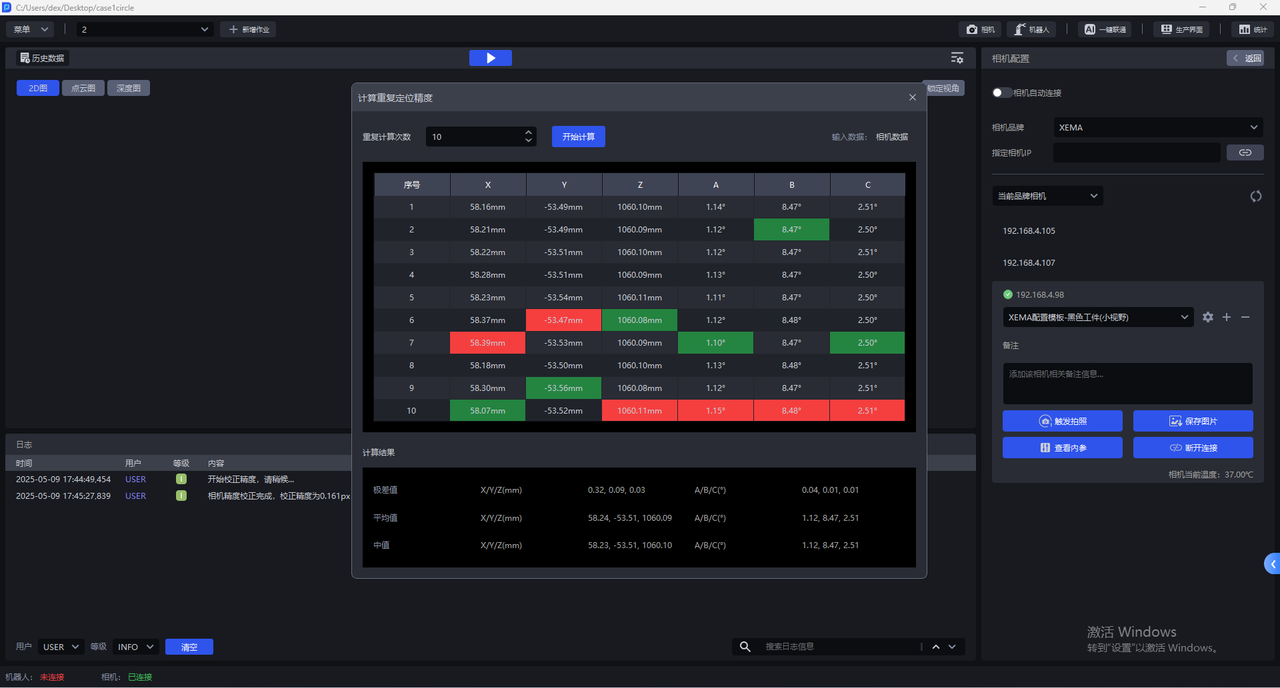
After entering the PickWiz main page, connect the Camera and Robot, place a single workpiece within the Camera field of view, and configure the task according to the actual Scene (see task Operation Guide). Click Menu, then click Calculate Repeated Positioning Accuracy.
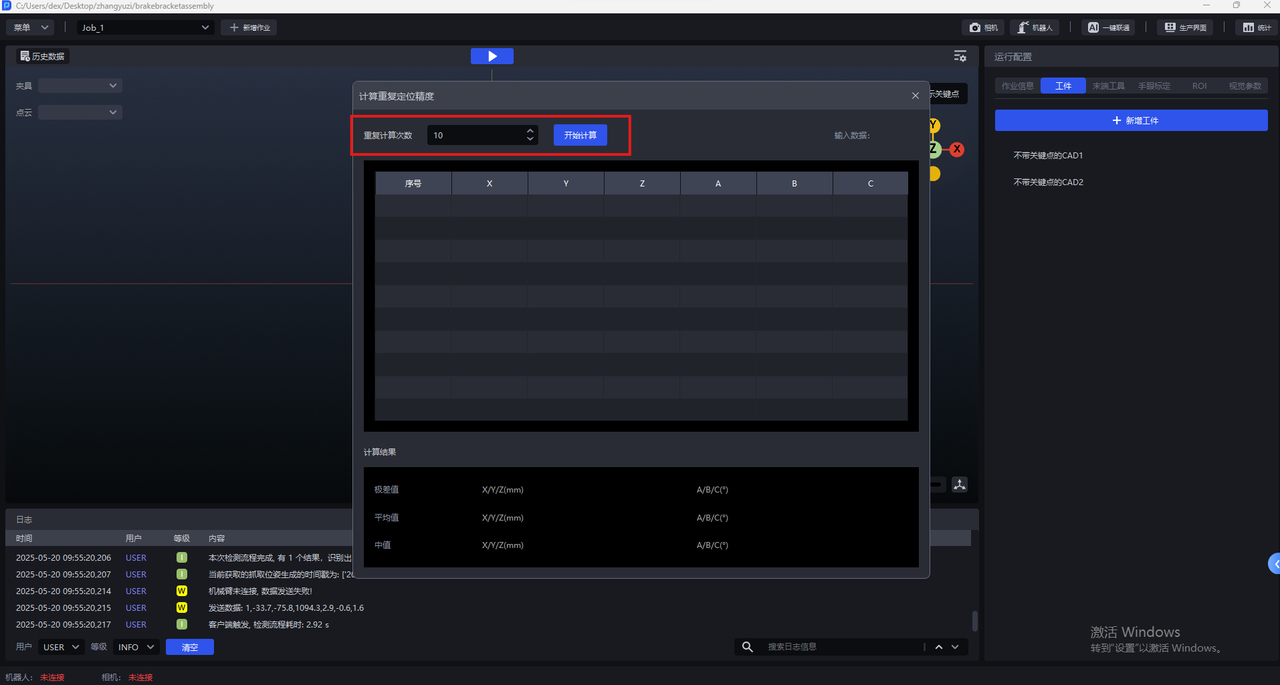
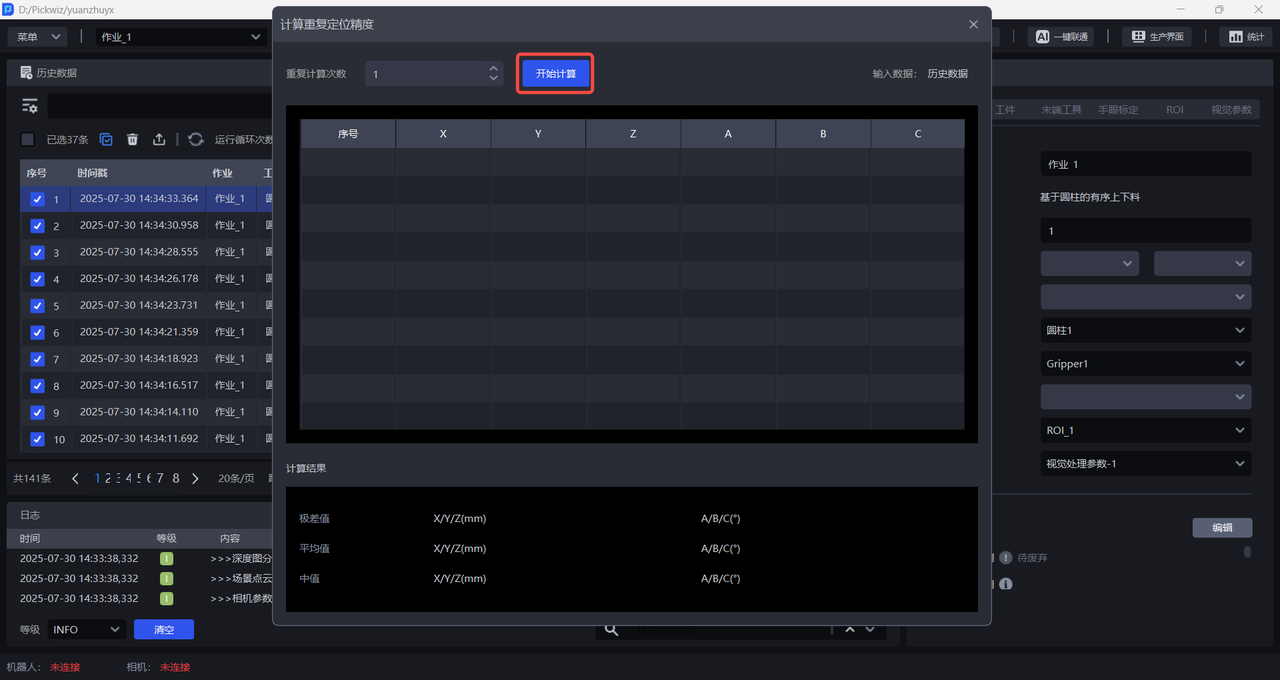
Enter the repeated positioning accuracy calculation panel and set the number of repeated calculations. The default is 10 times. The more times you calculate, the more accurate the result will be. After the settings are completed, click Start Calculation.
Note
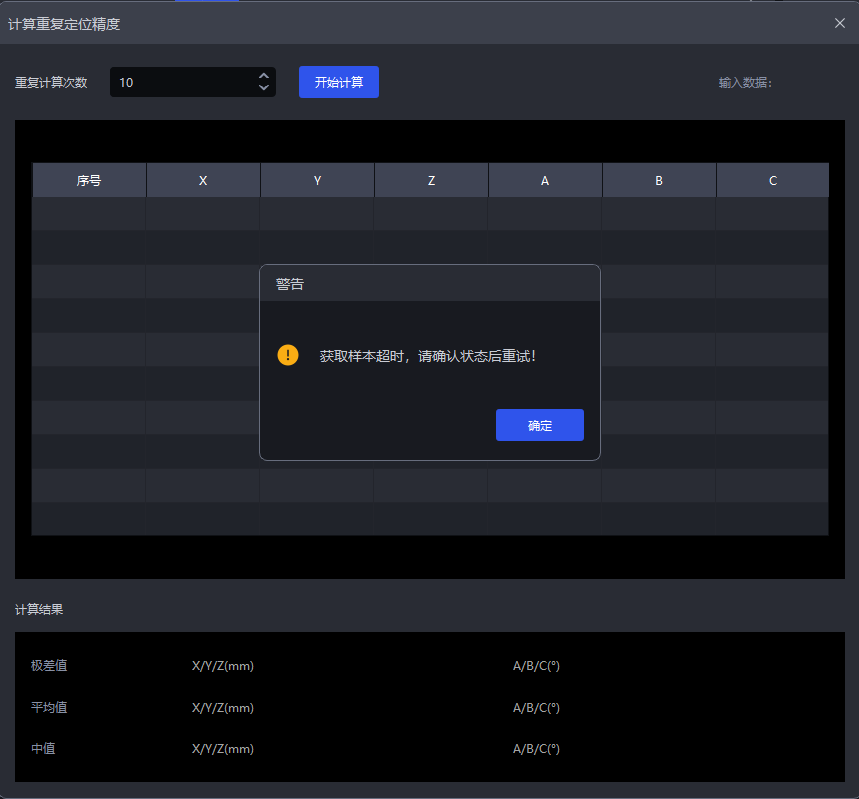
If you click
Start Calculationand no pose data or runtime progress is generated for a long time, followed by a timeout pop-up window (as shown in the figure below), it indicates an abnormal run. Please click OK, close the repeated accuracy calculation interface, and go to the log area on the main page to investigate the cause of the exception.
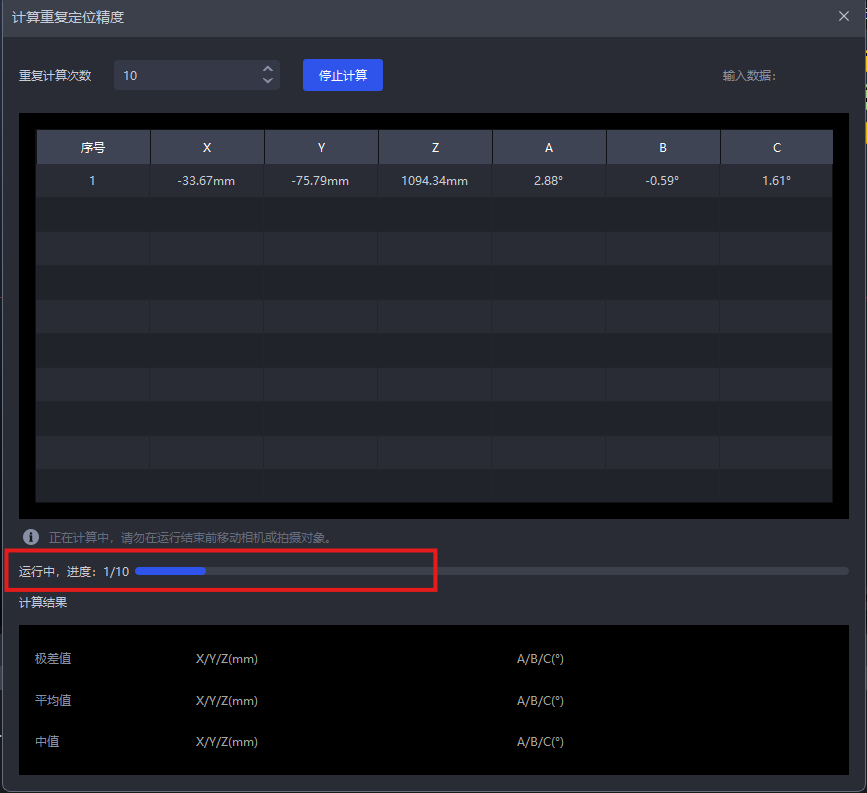
The accuracy calculation runs automatically. During the run, the obtained pose information is automatically counted on the page, and the range, average, and median of the pose are calculated. You can view the runtime progress above the calculation results.
After the configured number of repeated calculations is completed, a prompt pop-up window will appear automatically. Click Confirm.
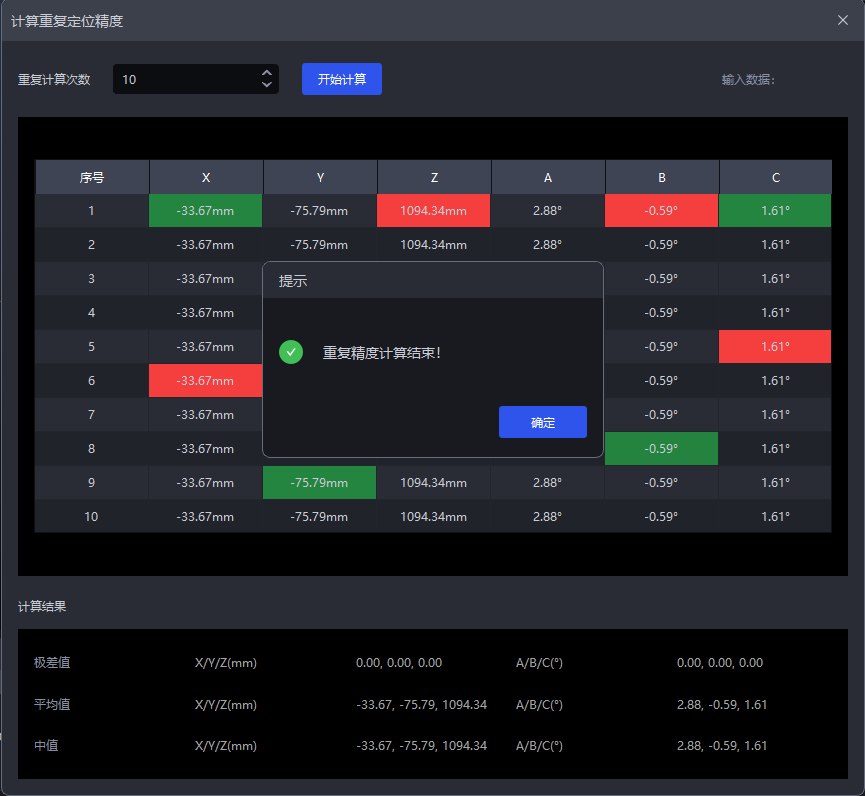
As shown in the figure below, after the repeated accuracy calculation is finished, you can view the workpiece pose information for each run and the accuracy calculation results in the interface.
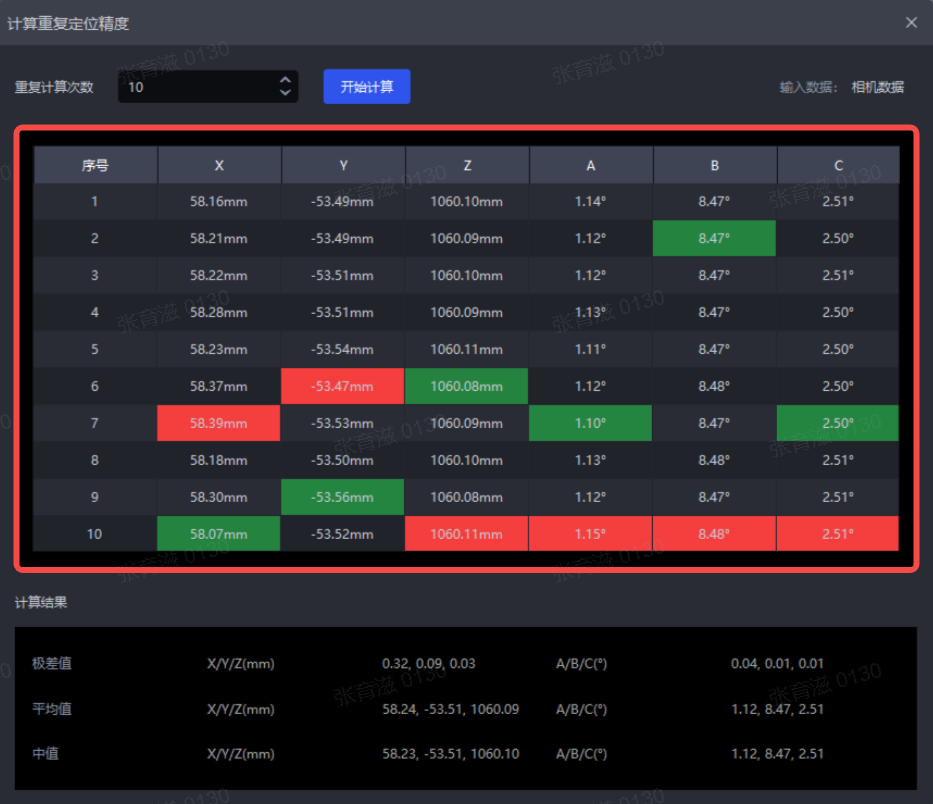
(1) Workpiece pose information
As shown in the figure below, you can view the 6D pose information (X, Y, Z, A, B, C) of the workpiece obtained in each calculation in the middle of the interface. The red values are the maximum values of each degree-of-freedom data among the N calculations, and the green values are the minimum values of each degree-of-freedom data among the N calculations.
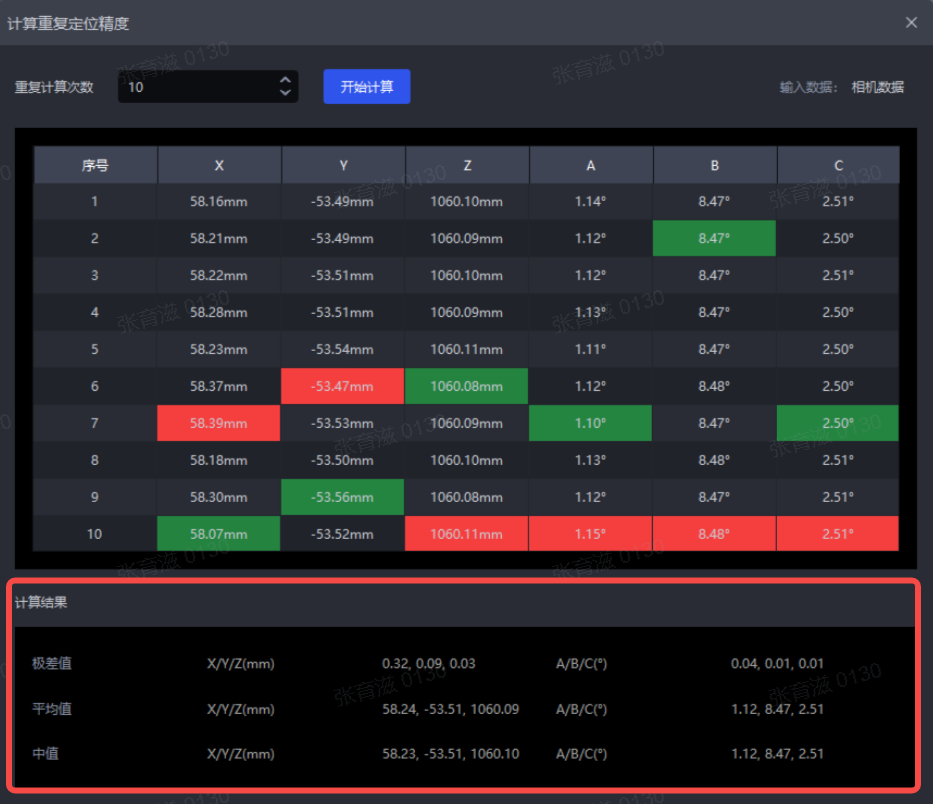
(2) Accuracy calculation results
You can view the range, average, and median of each Parameter in the N runs at the bottom of the interface.
| Parameter | Calculation method |
|---|---|
| Range | The difference between the maximum and minimum value of each degree-of-freedom data among the N calculation results |
| Average | The sum of each degree-of-freedom data among the N calculation results / N |
| Median | The median of each degree-of-freedom data among the N calculation results after sorting by size |
In most cases, a range value smaller than 0.5 mm for the X/Y/Z-axis coordinates can meet the accuracy requirements of general scenarios. If the actual Scene requires higher accuracy, the range value of the X/Y/Z-axis coordinates should be smaller, for example ±0.1 mm. If the range value is too large, you can improve the accuracy by checking the following aspects: whether the Robot and Camera are firmly installed, Robot absolute accuracy, Camera Point Cloud quality, Camera Intrinsic Parameter, recognition accuracy, etc.
2. Calculate repeated positioning accuracy using historical data
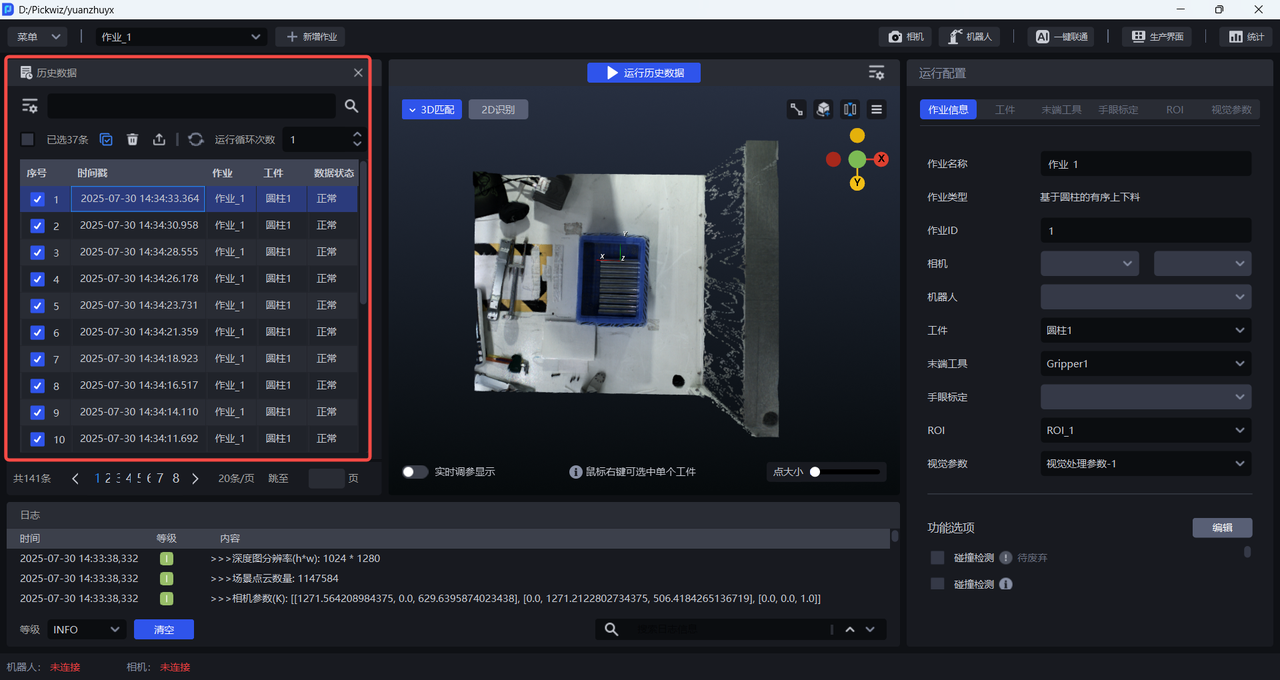
- Check multiple historical data records
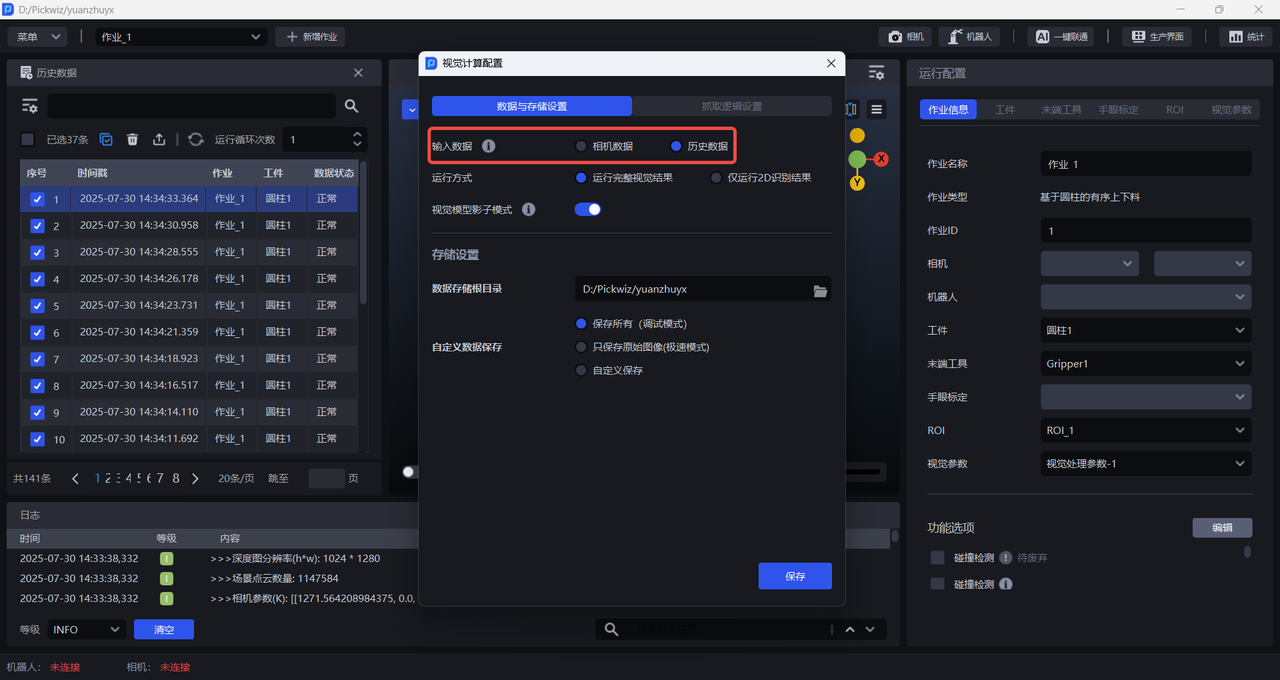
- In the
Vision Calculation Configurationinterface, switchInput DatatoHistorical Dataand save
- Then click
Calculate Repeated Positioning AccuracyinMenu, open theCalculate Repeated Positioning Accuracyinterface, and clickStart Calculation
- After the calculation is finished, you can view the workpiece pose information for each run and the accuracy calculation results in the interface.