Configuration Instructions for Count Calculation and Sending in PickWiz
Description
| Function Name | Location | Purpose | Example |
|---|---|---|---|
Robot Configuration
| Robot Configuration - Custom Message Format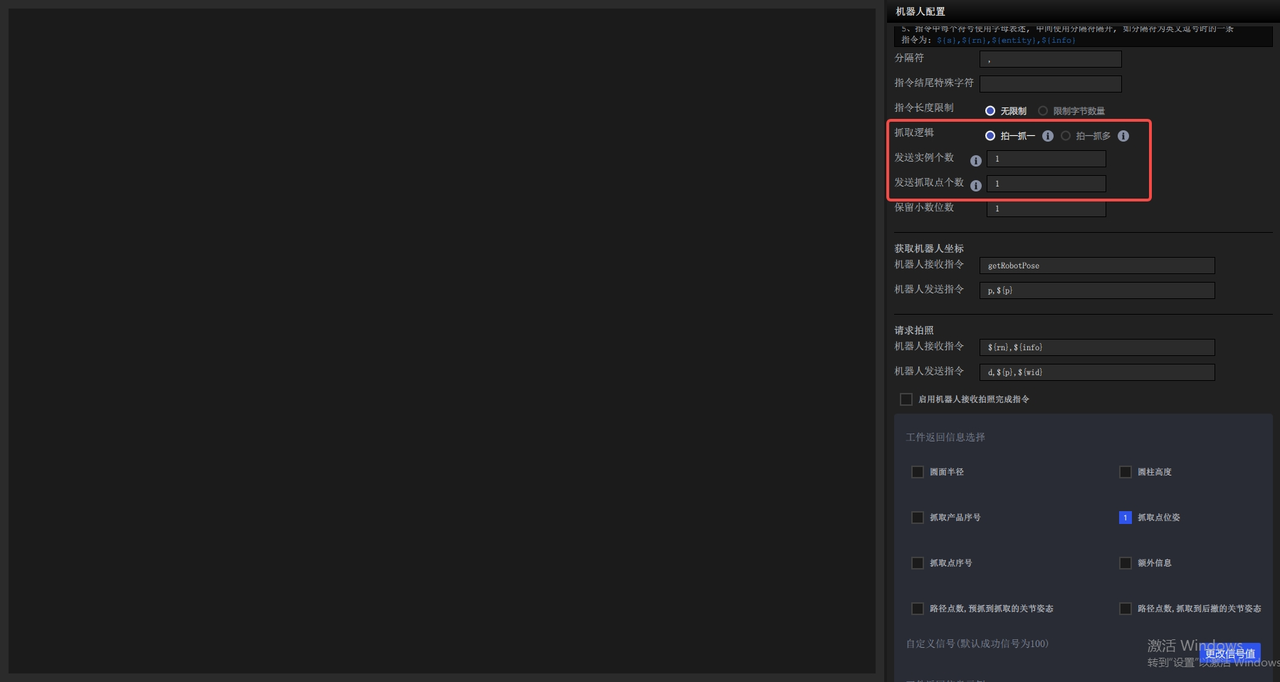 | Controls the number of instances sent from the vision system to the Robot and the number of Pick Points for each instance. |
|
| Pose Calculation Count | Visualization Window - Vision Calculation Configuration: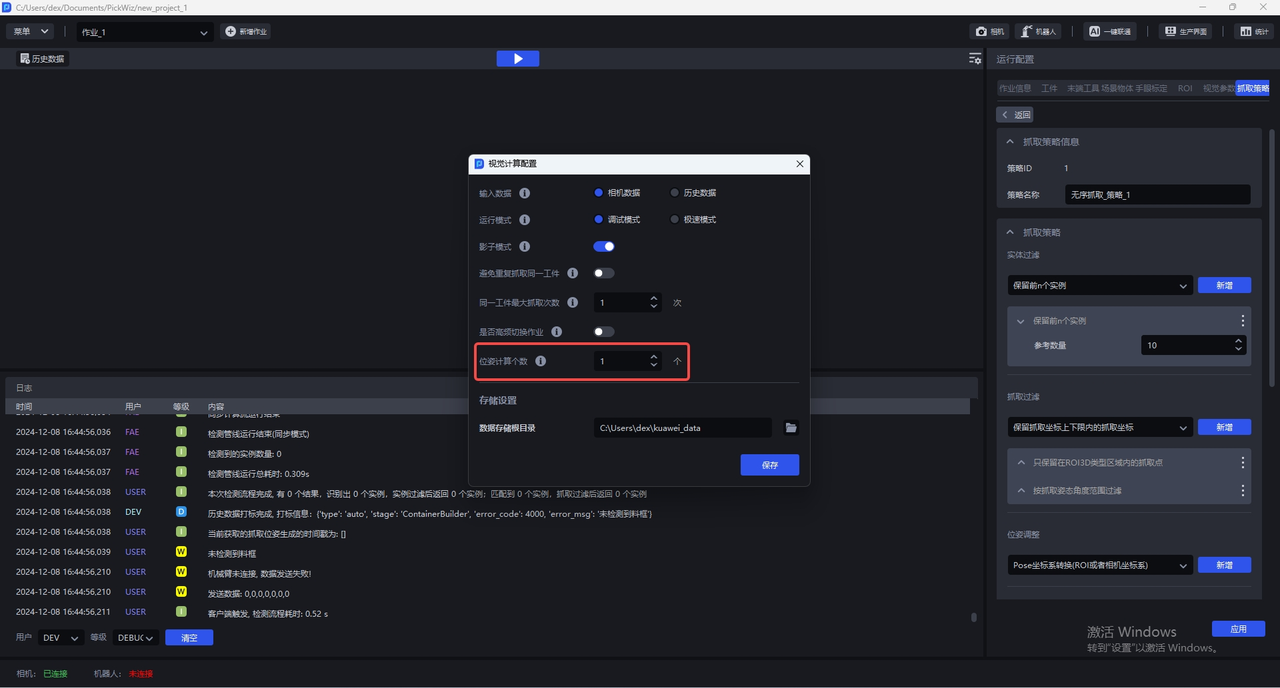 | After 2D recognition, sorting, and filtering, this is the number of instances whose poses will actually be calculated. The larger the value, the longer the processing time. Recommendations for each scenario are as follows:
| |
| Keep the First n Instances | grasping strategy - Instance Filtering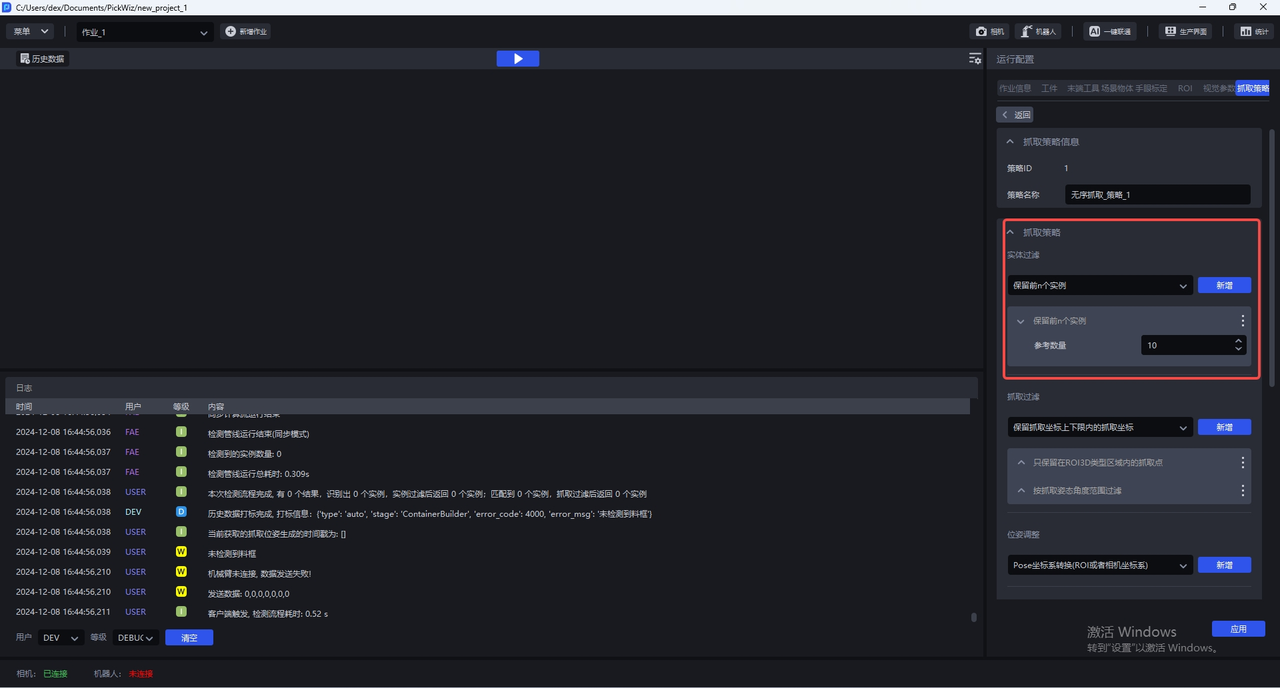 | Only the first N instances are retained, and any excess instances will be filtered out, this function is currently not recommended and will be deprecated later. |