Vision Calculation Configuration Operation Guide
Vision calculation configuration is a customized system configuration for the entire PickWiz vision calculation process. Users can customize system behavior according to specific Scene requirements. By configuring “Data and Storage Settings” and “Picking Logic Settings,” PickWiz can achieve the best balance among picking accuracy, Takt Time, and picking stability, guiding the Robot to achieve accurate and efficient picking.
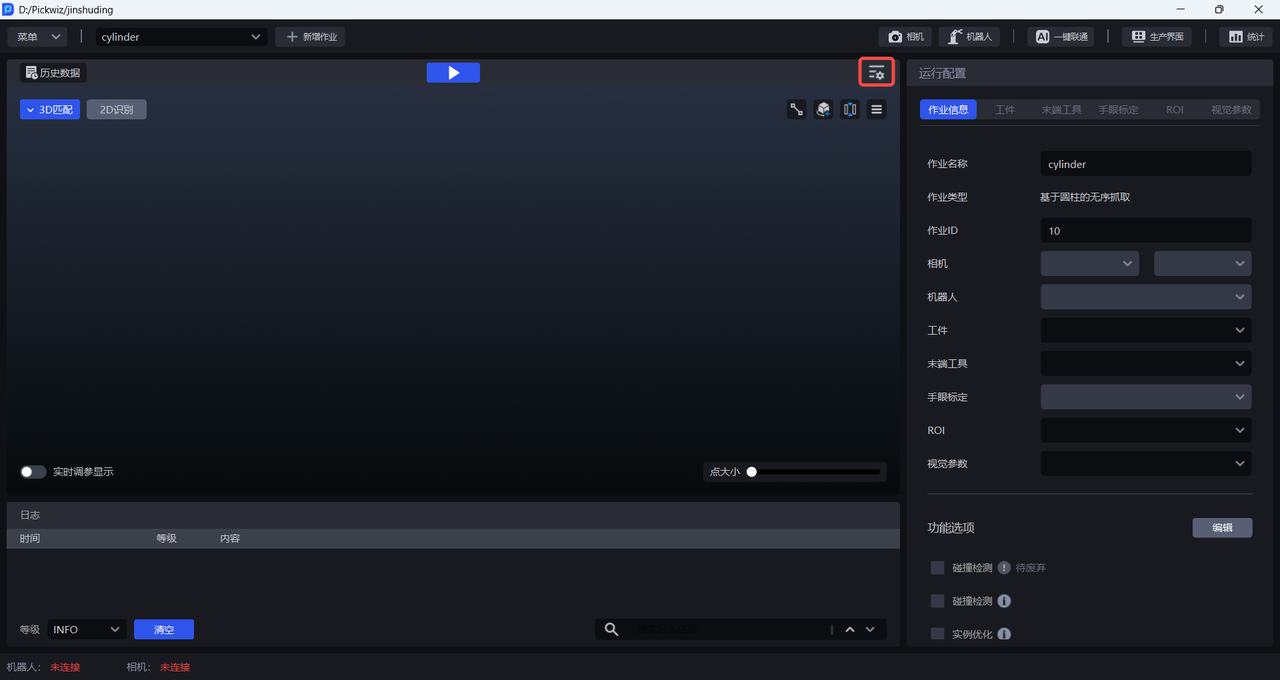
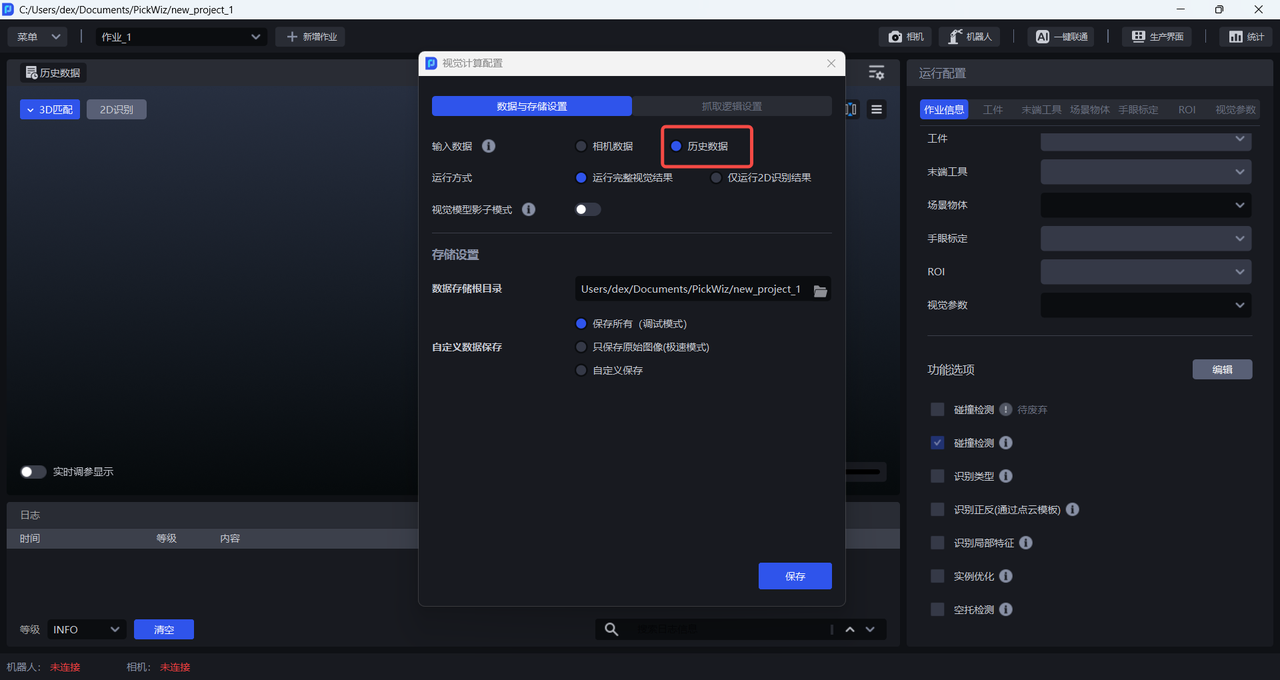
Click on the PickWiz main interface

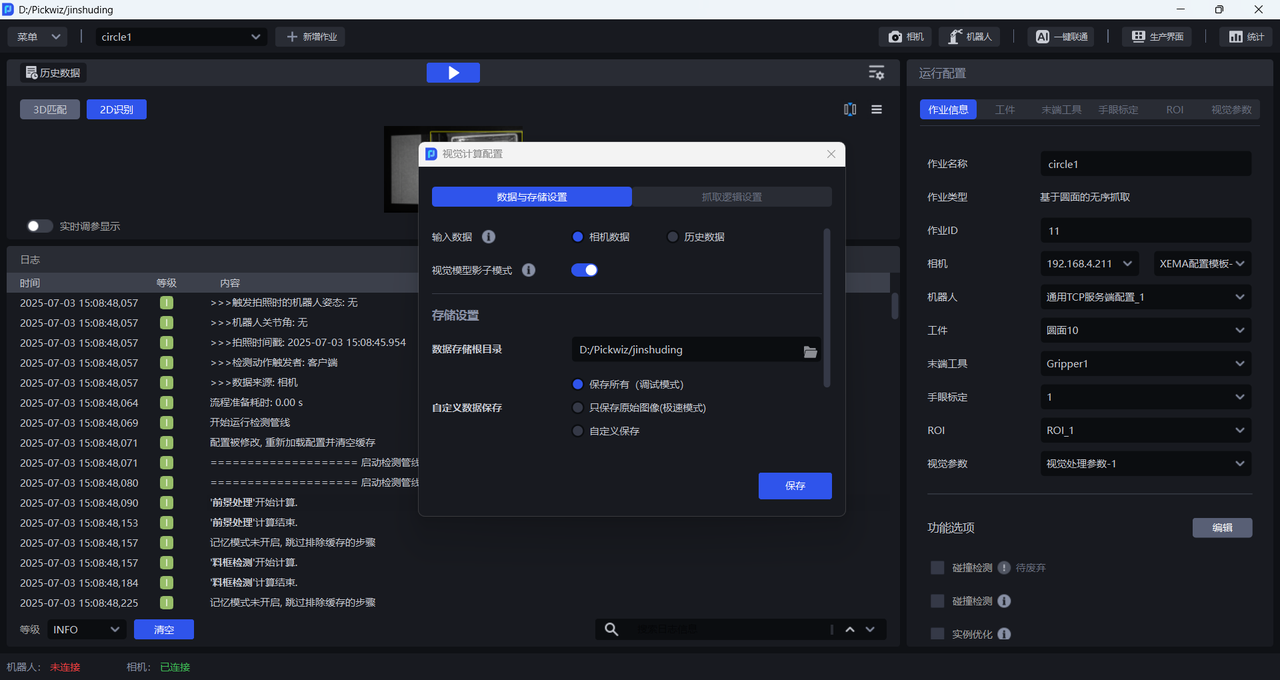
to enter the Vision Calculation Configuration page, as shown below.
1. Data and Storage Settings

1.1 Input Data
During vision calculation, Camera data or historical data is input into the Workflow of the corresponding Scene. The Workflow performs 2D recognition, 3D calculation, and Pick Point processing on the input data, and then outputs Pick Points on the Target Object.
1.1.1 Camera Data
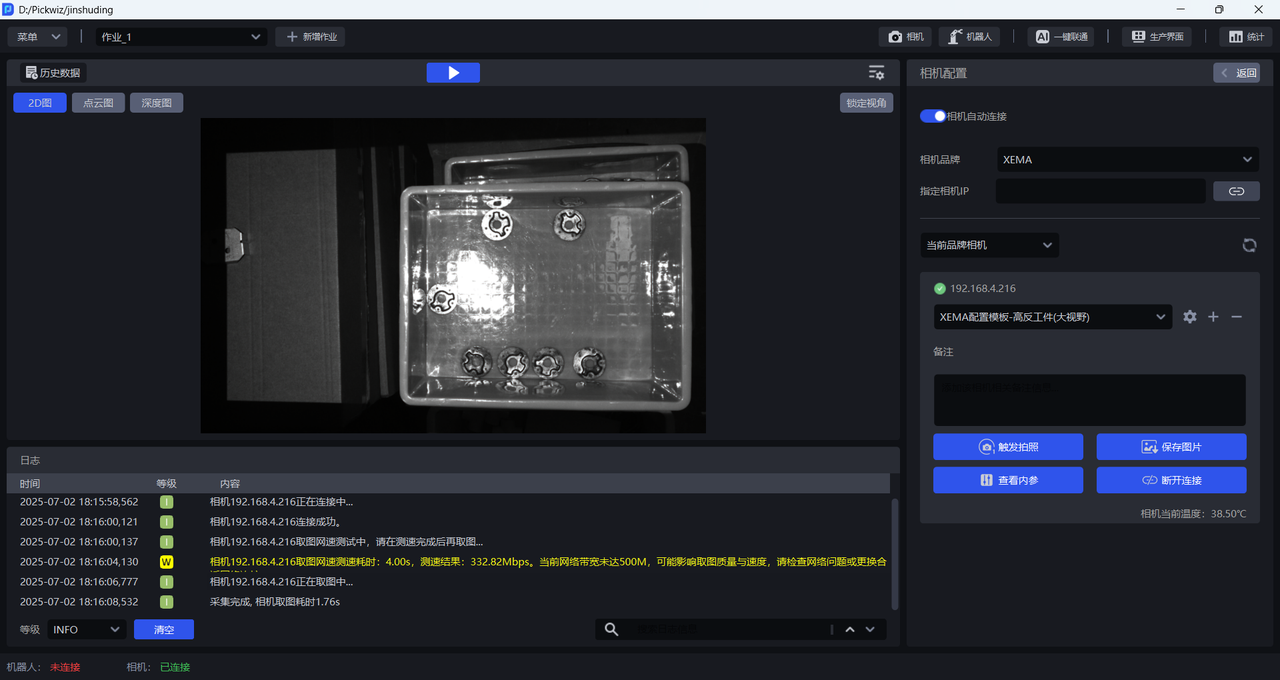
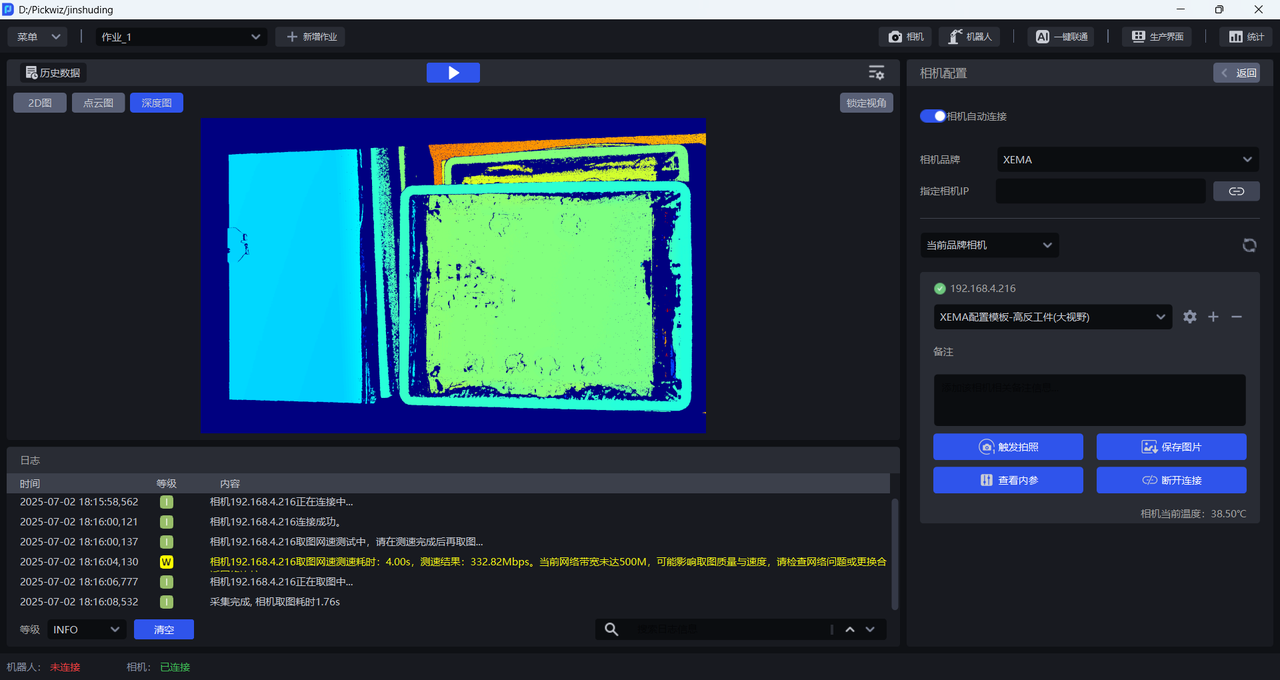
Camera data is real-time Scene data collected by the Camera, including 2D images, depth images, and Point Cloud images, as shown below.
The workflow for using Camera data for vision calculation is as follows:
(1)Create a new Project and task, connect the Camera and Robot, and finish configuring the task information. For details, refer to Project Operation Guide, Task Operation Guide, Camera Connection and Parameter Adjustment Guide, and Robot Configuration and Communication Operation Guide.
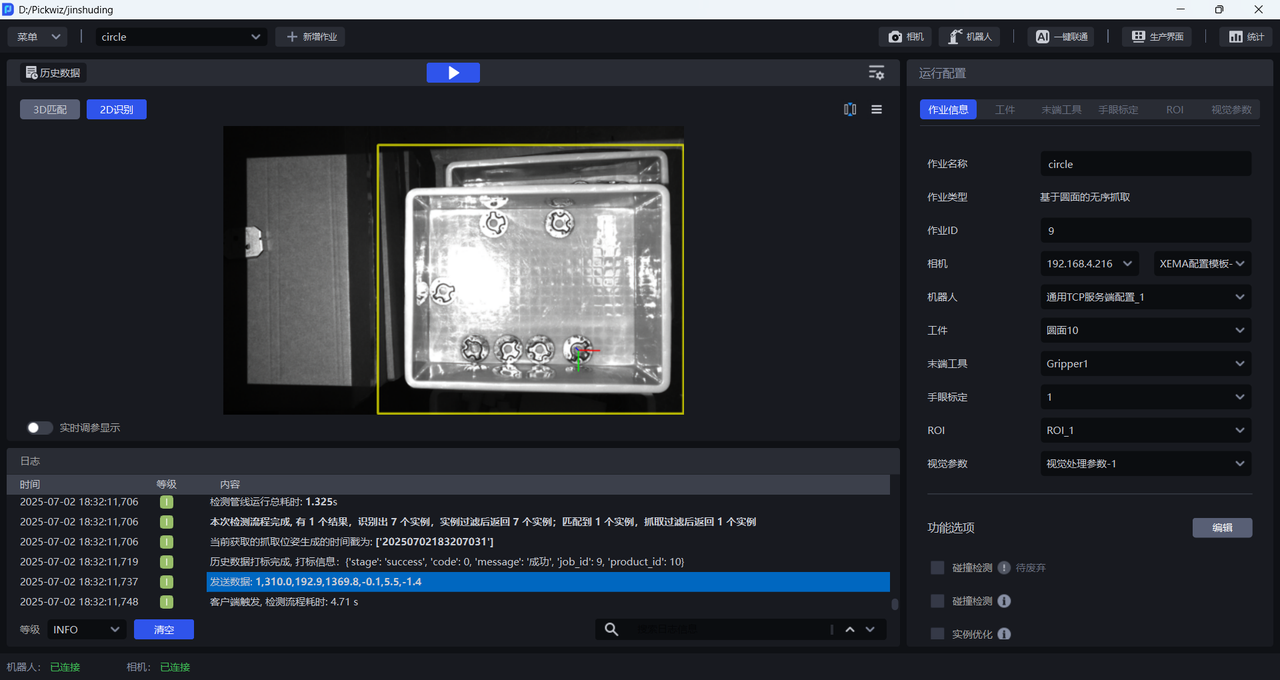
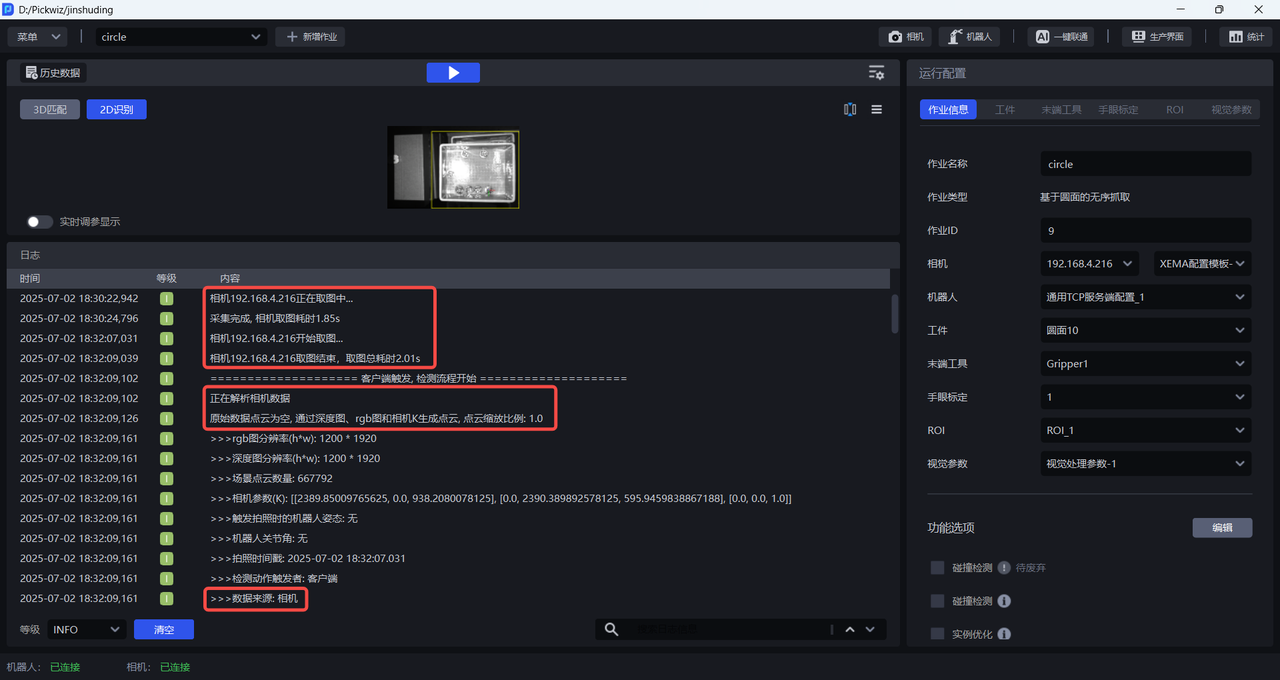
(2)After clicking Run, the Camera data is input into the Workflow for vision calculation, and Pick Points are output in the end. The beginning of the log shows that the data source is Camera data, as shown below.
1.1.2 Historical Data
Historical data is the running record of PickWiz over a past period of time. It stores the input data and output results of each process in vision calculation and is used to troubleshoot fault causes. As shown below, for detailed instructions, refer to Historical Data User Guide.
The workflow for using historical data for vision calculation is as follows:
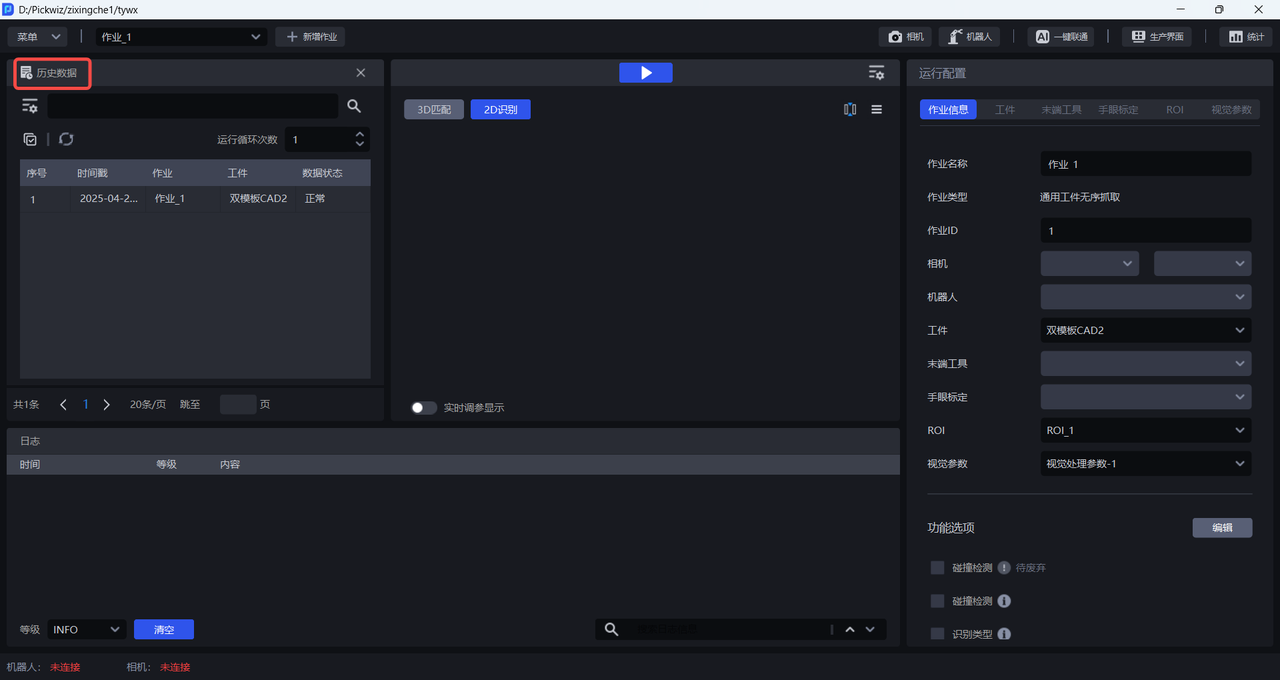
(1)Click Historical Data to open the historical data pop-up window
(2)Open the Vision Calculation Configuration pop-up window, switch Input Data to Historical Data , and for historical data input you can choose Run Full Vision Results and Run 2D Recognition Only .
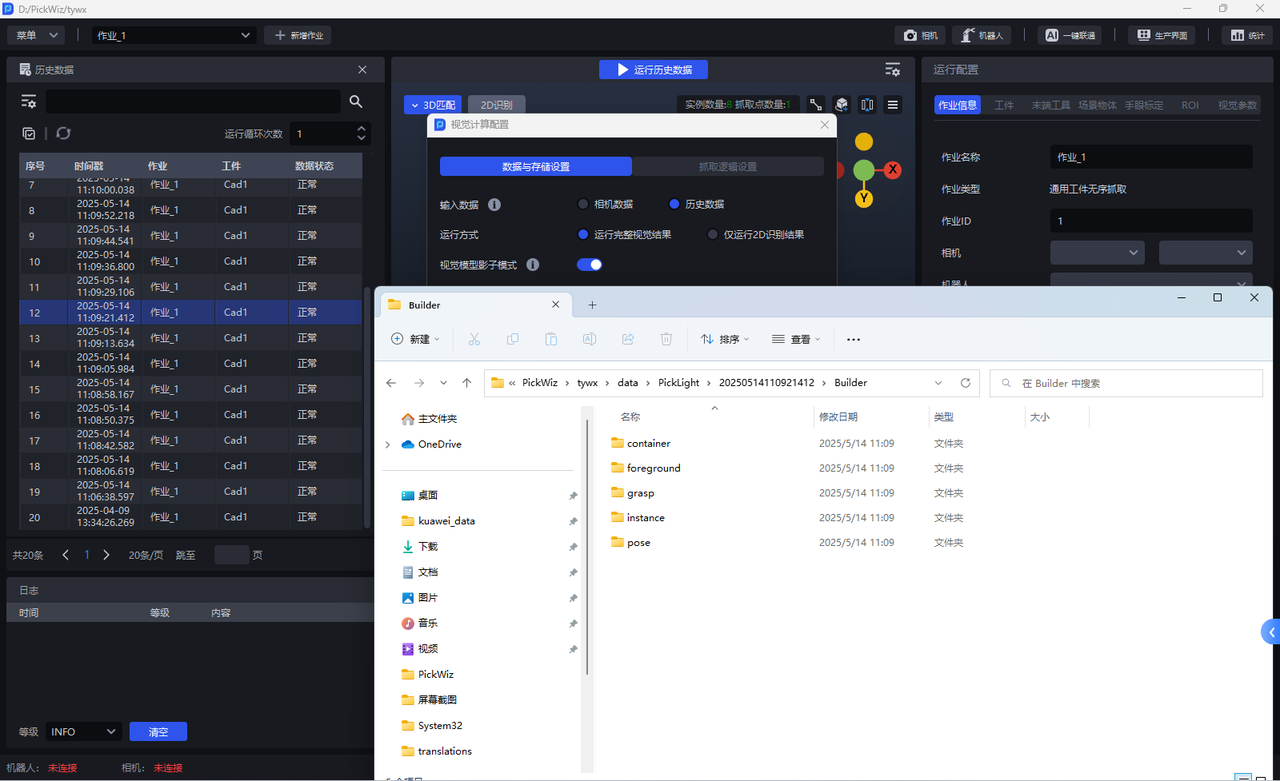
Selecting Run Full Vision Results saves the complete rerun record of the historical data, as shown below.
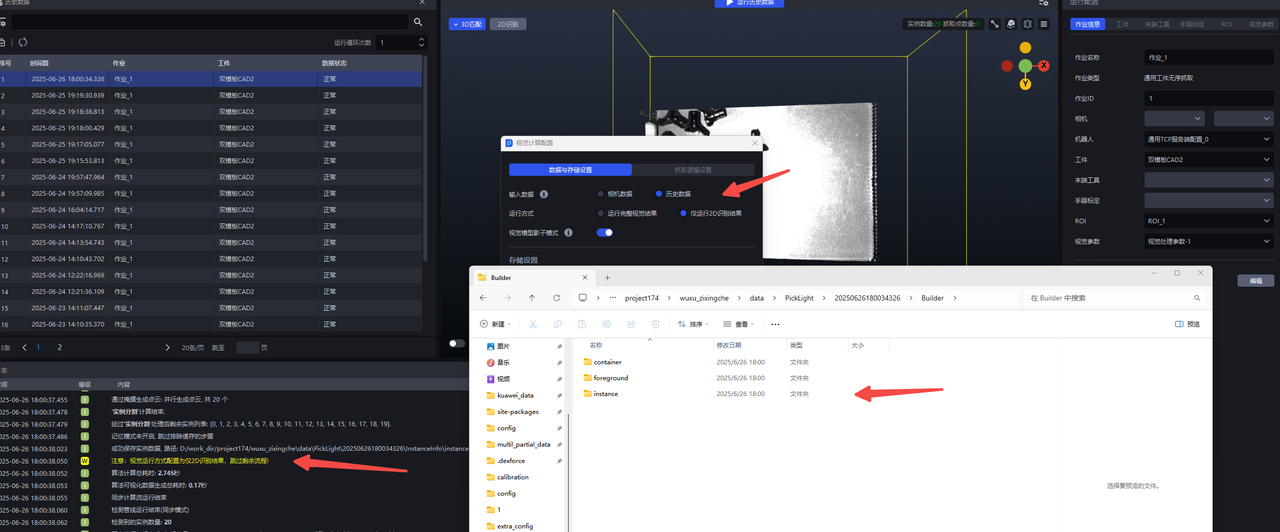
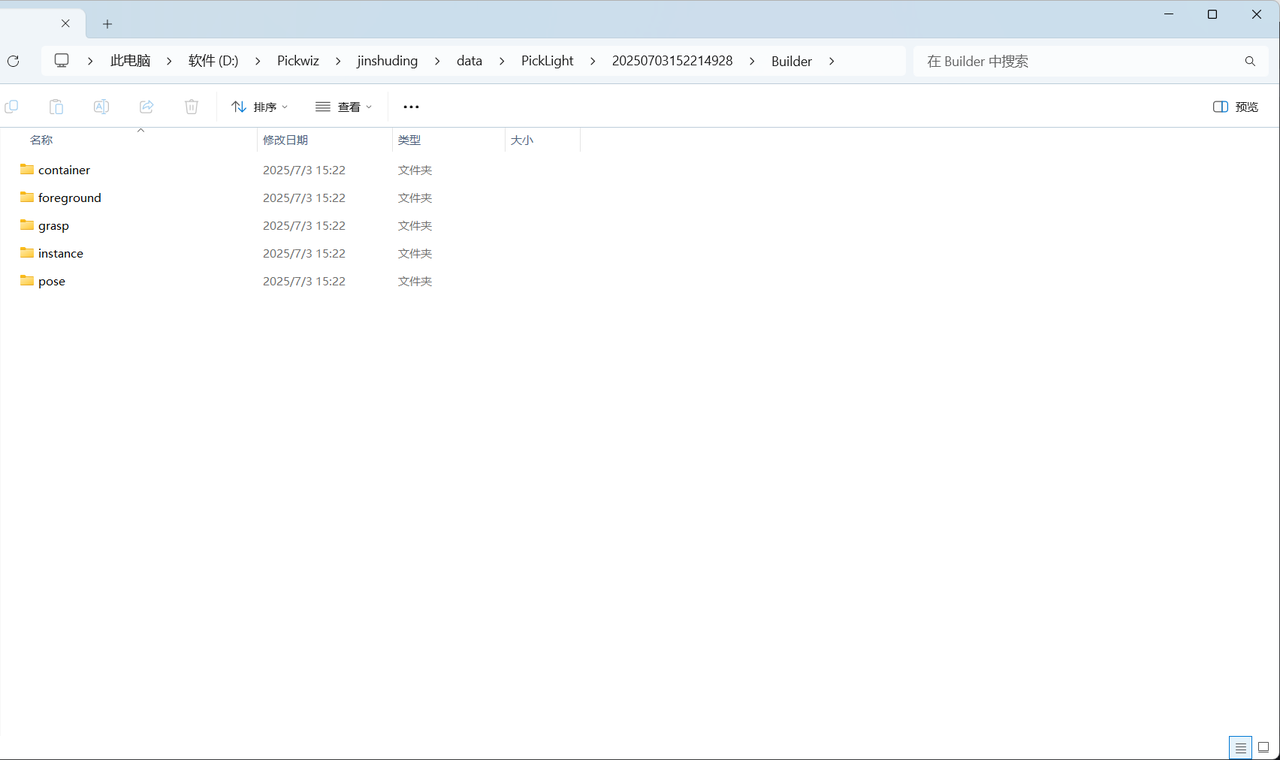
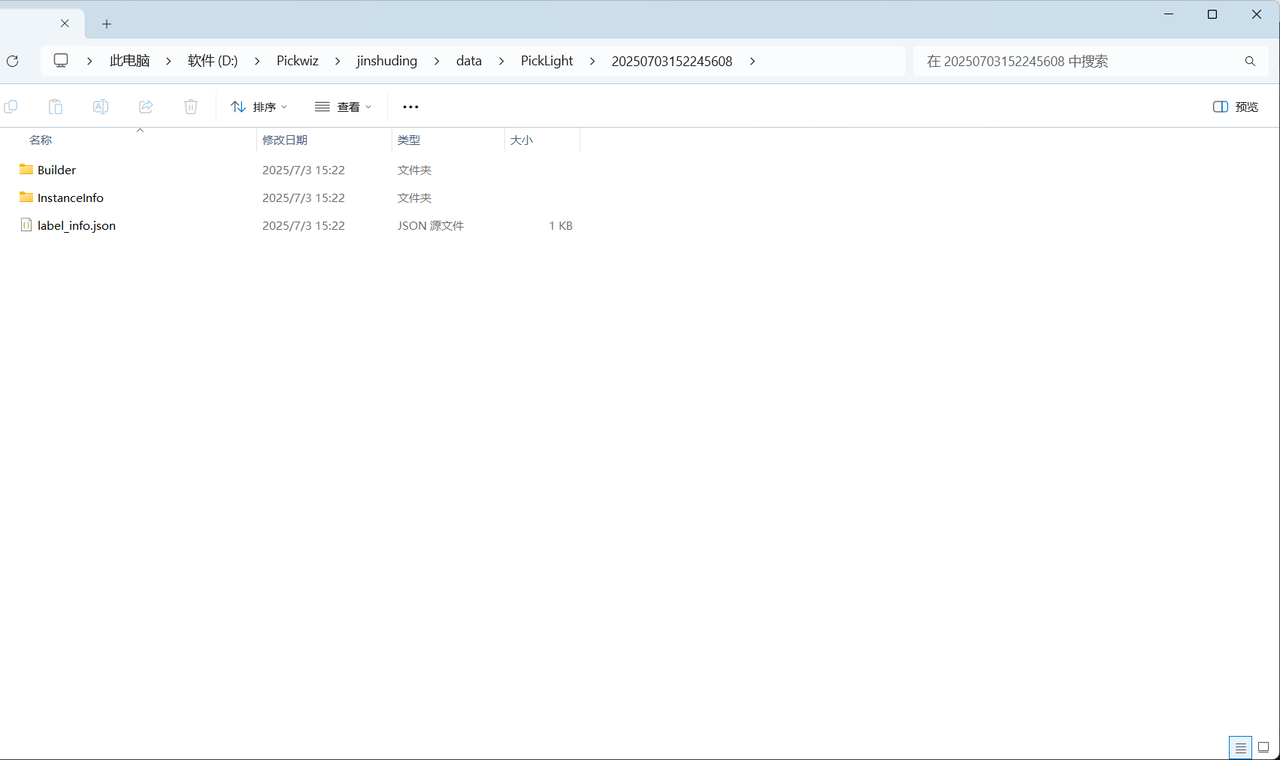
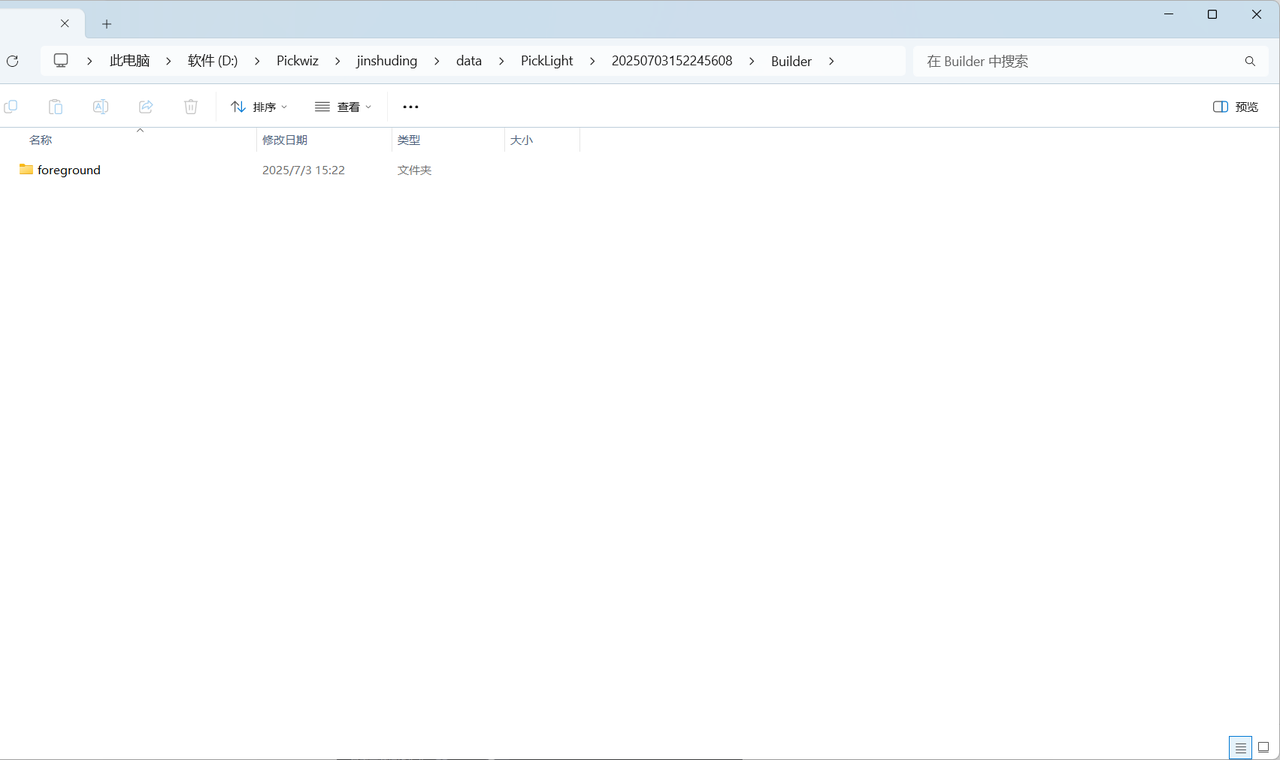
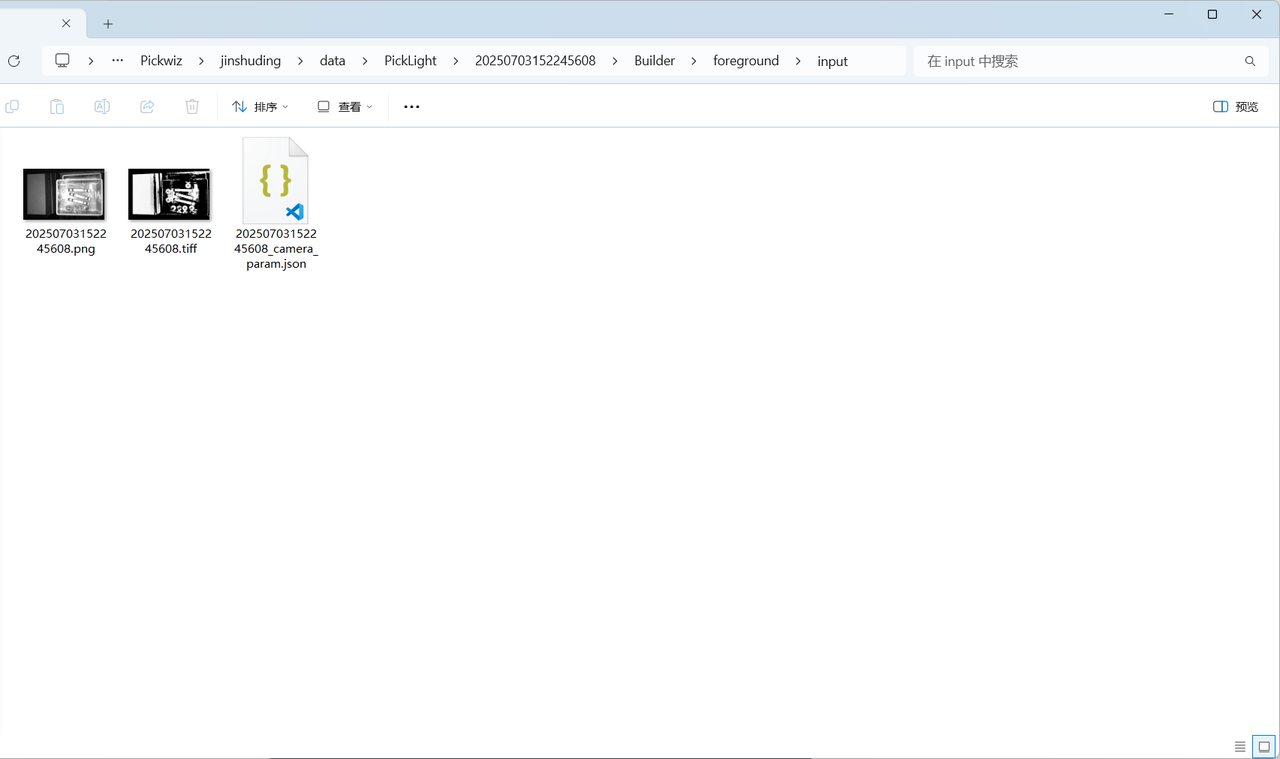
Selecting Run 2D Recognition Only saves only the rerun 2D recognition result of this historical data item (the Builder folder saves only foreground, container, and instance, and does not save pose or grasp), as shown below.
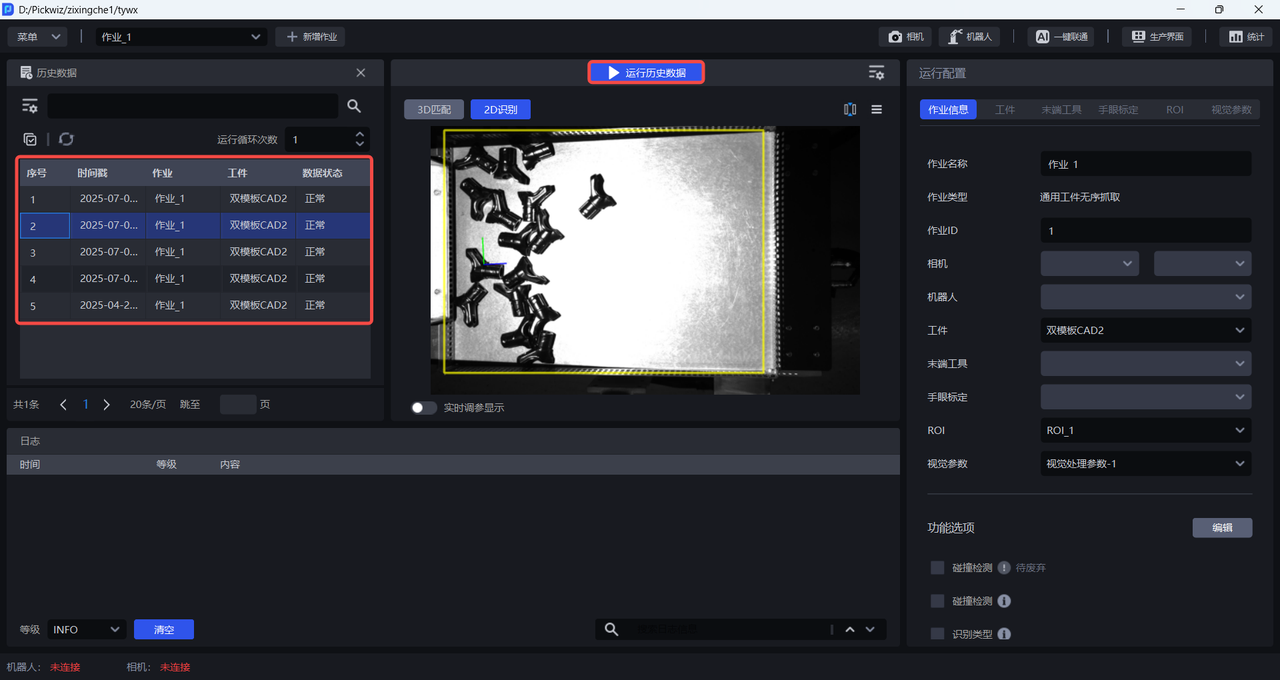
(3)After switching, the Run button becomes the Run Historical Data button, as shown below.
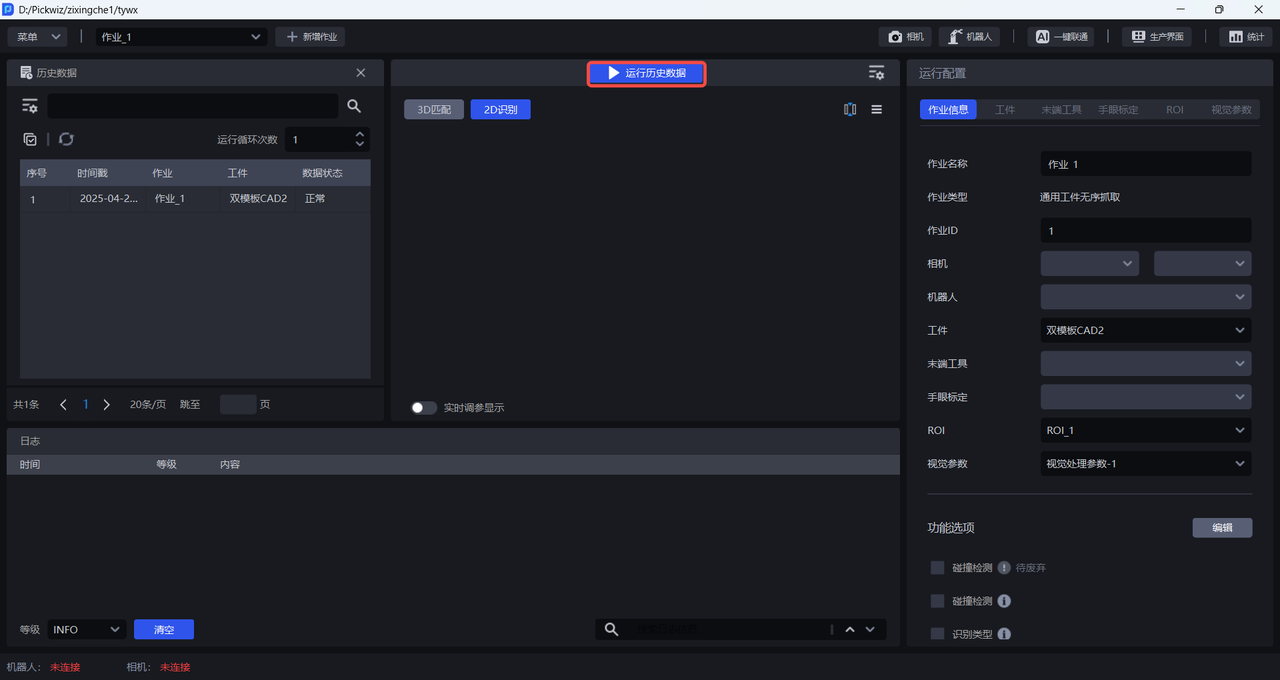
(4)Select one historical data item, then click the Run Historical Data button to input the historical data into the Workflow for vision calculation, and Pick Points are output in the end. The beginning of the Log shows that the data source is historical data, as shown below.
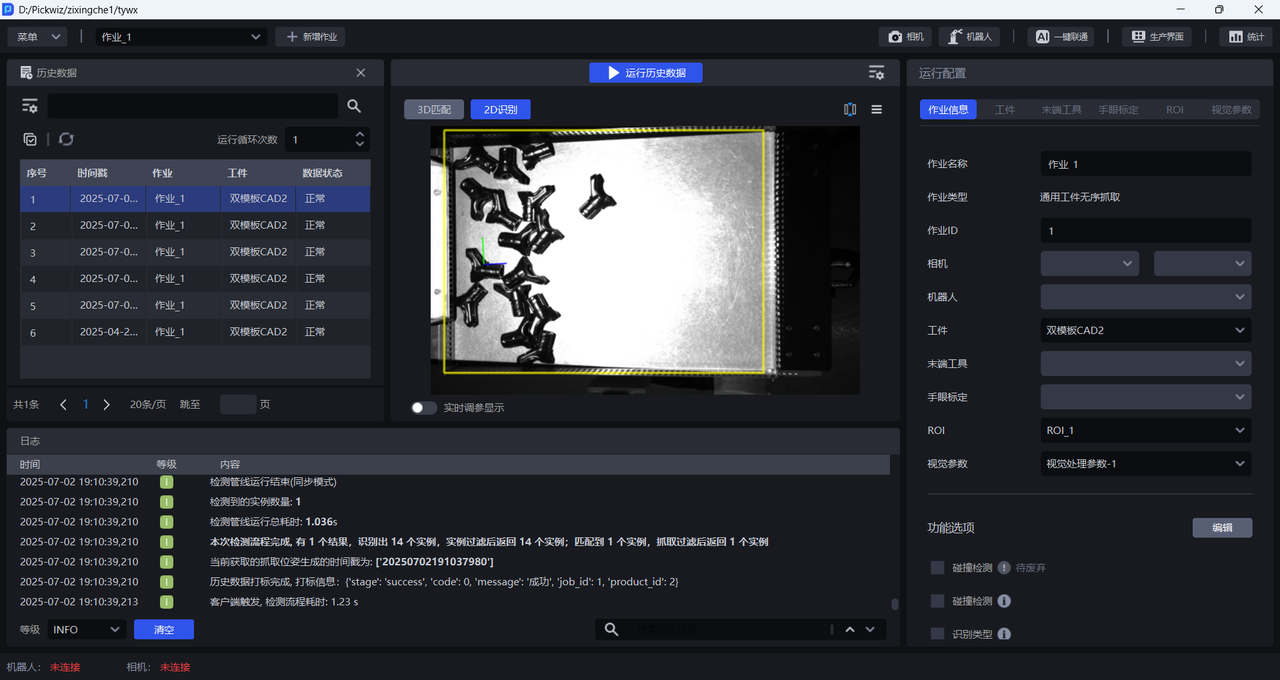

Before using historical data for vision calculation, there is no need to connect the Camera and Robot, and there is no need to configure task information. The Workflow uses the current task configuration to perform vision calculation on the historical data.
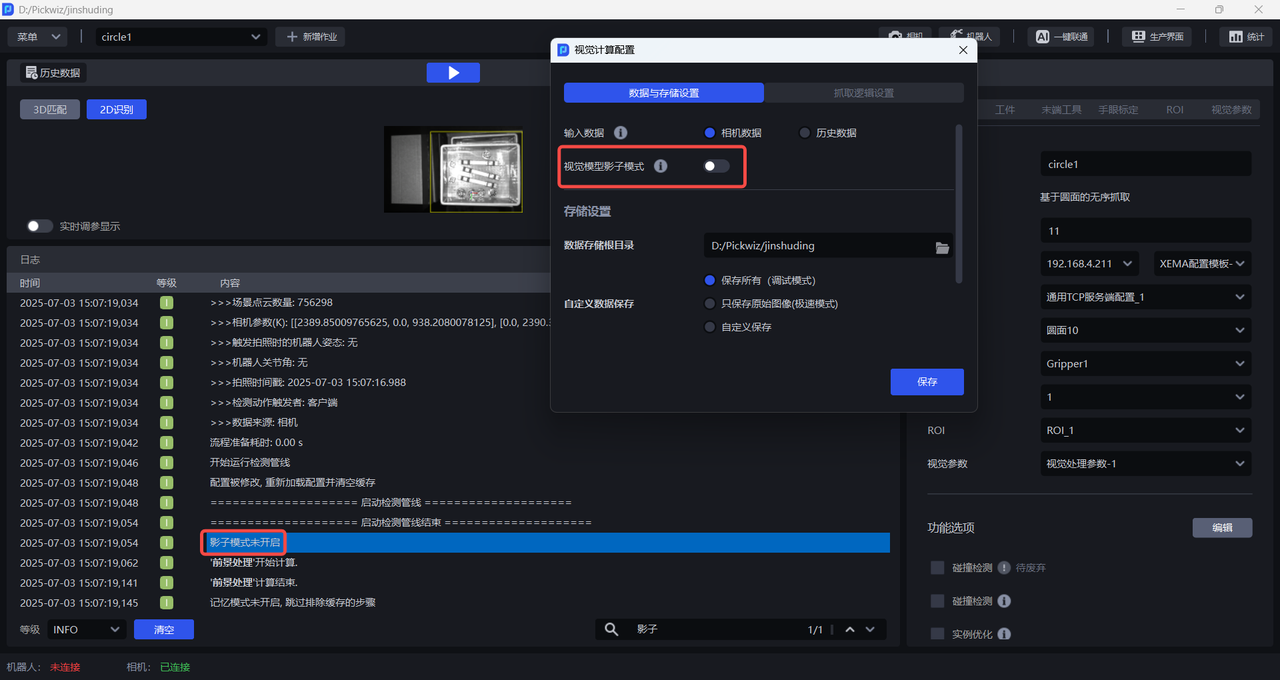
1.2 Vision Model Shadow Mode
After it is enabled, the system saves task running data. Among them, the data triggered by the Robot is used for vision model Shadow Mode training under the Target Object module to optimize the model recognition effect.
If this option is disabled, task runs do not save Shadow Mode data, as shown below.
After this option is enabled, running the task saves Shadow Mode data, as shown below.
1.3 Storage Settings
1.3.1 Root Directory for Data Storage
The root directory for data storage is the Project storage path, which is the same as the Project path selected when the Project was created and cannot be modified.


1.3.2 Custom Data Saving
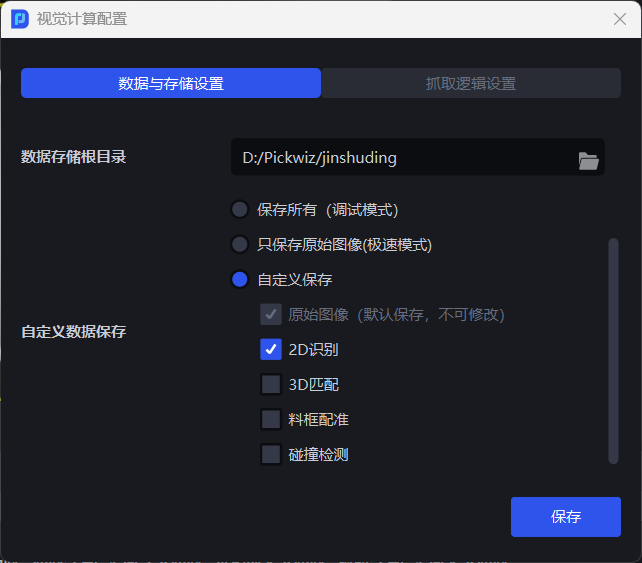
Custom data saving means saving the content generated during the vision calculation process. You can choose Save All (Debug Mode), Save Raw Images Only (Ultra-Fast Mode), or Custom Save.

- Save All (Debug Mode), which saves the input data and output results of the entire vision calculation process, as shown below
- Save Raw Images Only (Ultra-Fast Mode), which saves only the raw 2D images and depth images, as shown below.
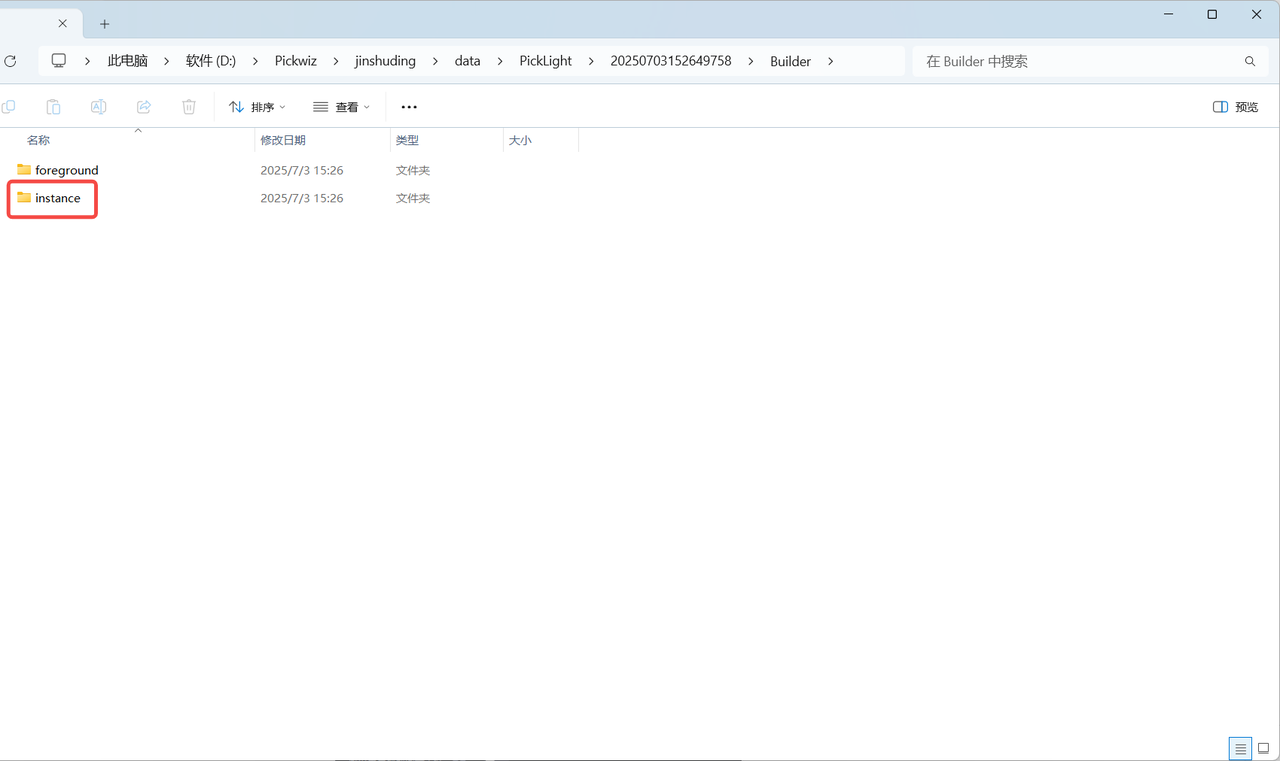
- Custom Save allows selective saving of content from the vision calculation process. It is suitable for on-site production scenarios where specific data needs to be saved for later lookup. As shown below, after 2D recognition is selected, the instance folder is saved in the historical data folder.
2. Picking Logic Settings
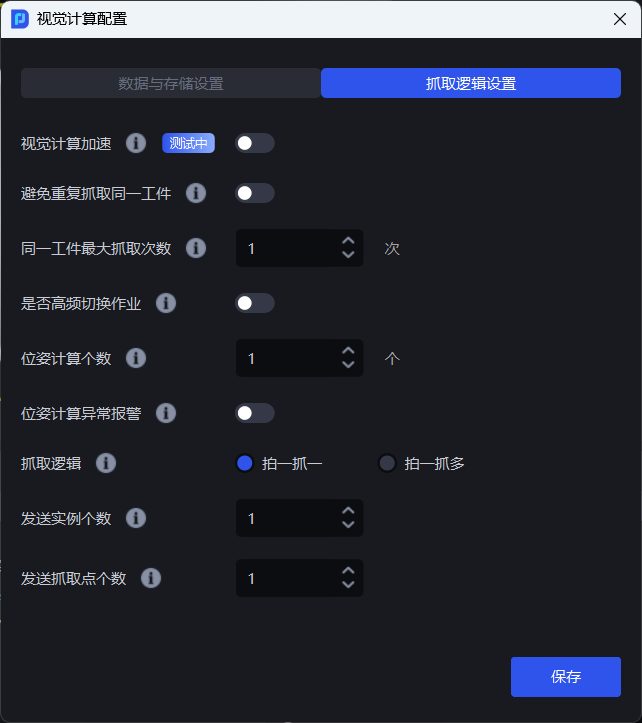
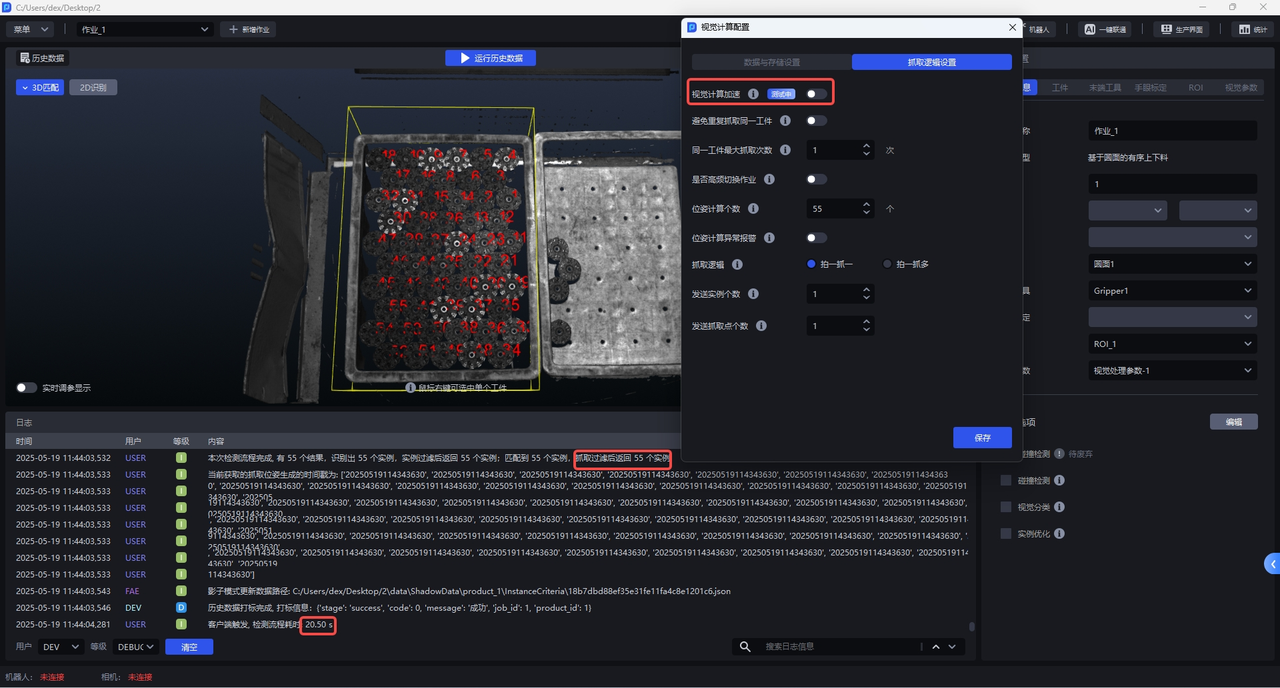
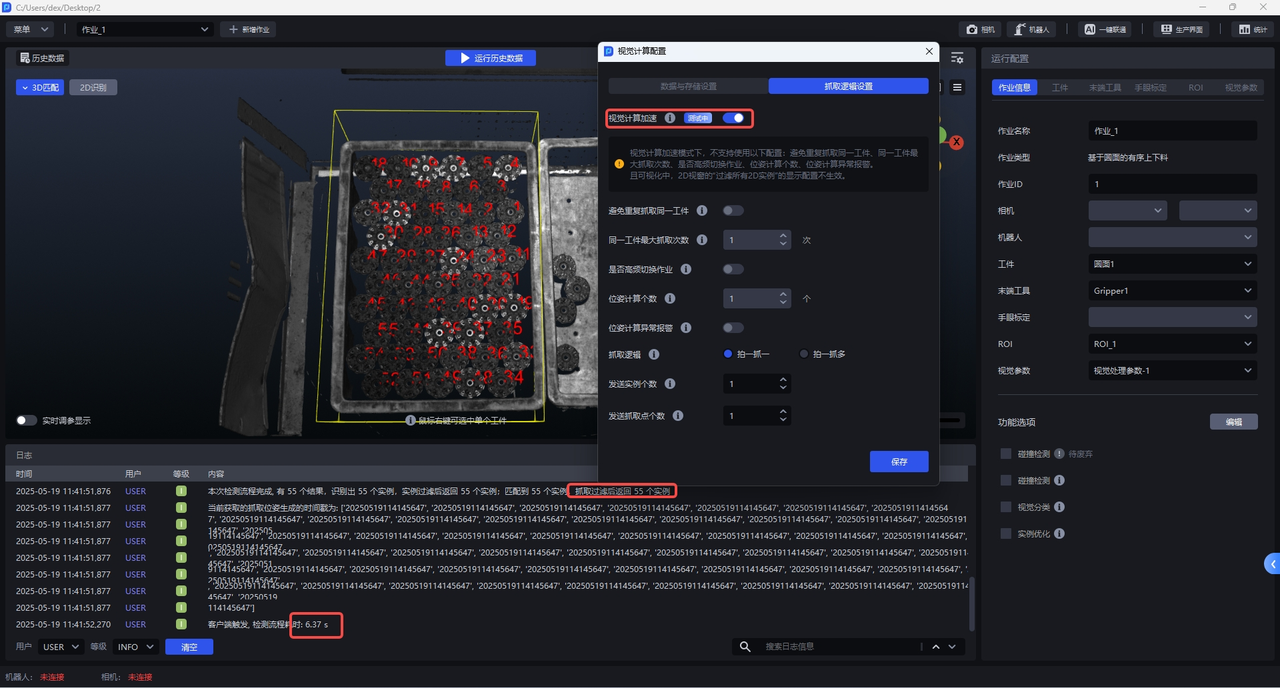
2.1 Vision Calculation Acceleration
After it is enabled, vision calculation takes less time, and by default all Target Object instances within the field of view are recognized. It is suitable for scenarios with many Target Object instances and strict Takt Time requirements.
PickWiz 1.8.2 supports this feature in Single Carton Depalletizing, ordered and unordered loading and unloading of General Target Objects, ordered and unordered loading and unloading of general Circular Surfaces/Cylinders, ordered loading and unloading of general quadrilaterals, and ordered loading and unloading of surface-type Target Objects (Parallelized).
It does not yet support Single Sack Depalletizing, ordered and unordered loading and unloading of surface-type Target Objects, loading and unloading of surface-type Target Objects (materials isolated from each other), ordered loading and unloading of surface-type Target Objects (Image Matching), or positioning assembly scenarios.
It does not yet support Feature Option scenarios (such as Recognition Type/Local Feature Recognition/Front/Back Recognition), Point Cloud noise removal, Pallet Detection, or Separator and Pallet Detection. It will gradually be integrated into other scenarios and Feature Option scenarios in the future.
Note:
When “Vision Calculation Acceleration” mode is enabled, “Avoid Repeatedly Picking the Same Target Object,” “Maximum Picking Attempts for the Same Target Object,” “Frequent Task Switching,” “Pose Calculation Count,” and “Pose Calculation Exception Alarm” do not take effect.
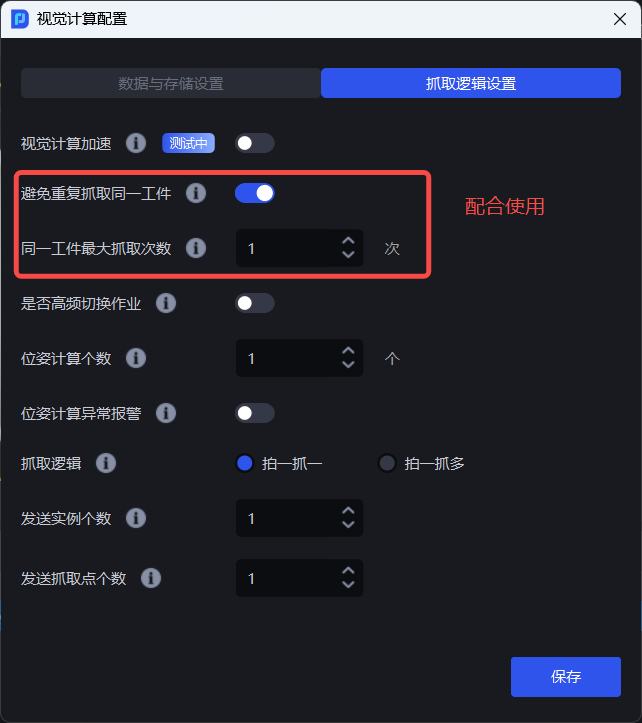
2.2 Avoid Repeatedly Picking the Same Target Object
After it is enabled, if the same Target Object cannot be picked successfully within the maximum number of picking attempts, it will no longer be picked. Instead, the system skips that Target Object and picks the next one.
Note:
If you need to enable “Avoid Repeatedly Picking the Same Target Object,” you should also enable “Maximum Picking Attempts for the Same Target Object” and set the maximum number of picking attempts for the same Target Object.

This is common in unordered scenarios, where some materials are pressed down by other materials and cannot be picked, or their picking is restricted by material bins and similar objects. For such Target Objects, repeated picking needs to be avoided to prevent wasting time.
Example

Note:
When “Vision Calculation Acceleration” mode is enabled, “Avoid Repeatedly Picking the Same Target Object” does not take effect even if enabled. In this case, if repeated picking needs to be avoided, you can use the “Filter Pick Points Similar to the Previous Vision Result” function in Pick Point filtering instead (Filter Pick Points Similar to the Previous Vision Result: calculates the pose variation between the current Vision Result and the previous Vision Result to determine whether it is the same Target Object and filters it out).

2.3 Maximum Picking Attempts for the Same Target Object
Indicates the maximum number of times the same Target Object can be picked. The value range is 1~5. It is used together with “Avoid Repeatedly Picking the Same Target Object.” If the same Target Object cannot be picked successfully within the maximum number of picking attempts, PickWiz no longer attempts to pick that Target Object and instead skips it to pick the next one.
2.4 Frequent Task Switching
Enable this option when tasks need to be switched frequently in actual production scenarios. It can improve Takt Time.
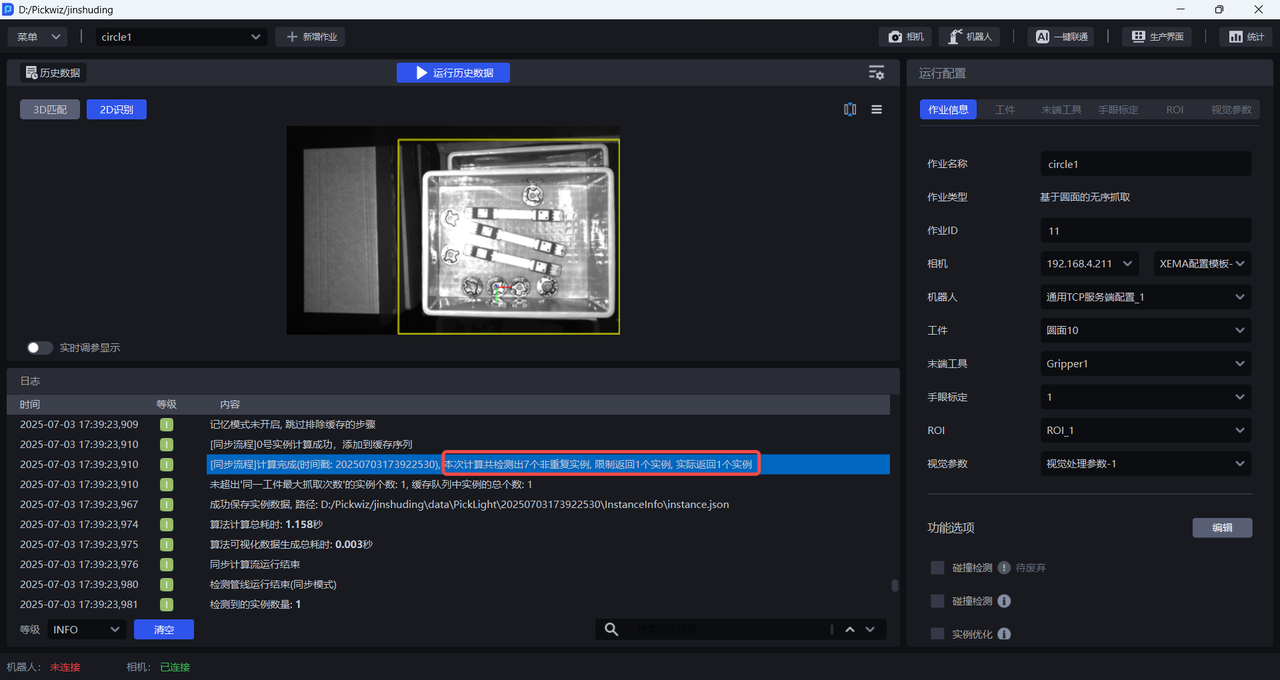
2.5 Pose Calculation Count
Set the maximum number of Target Object poses calculated by the vision system.
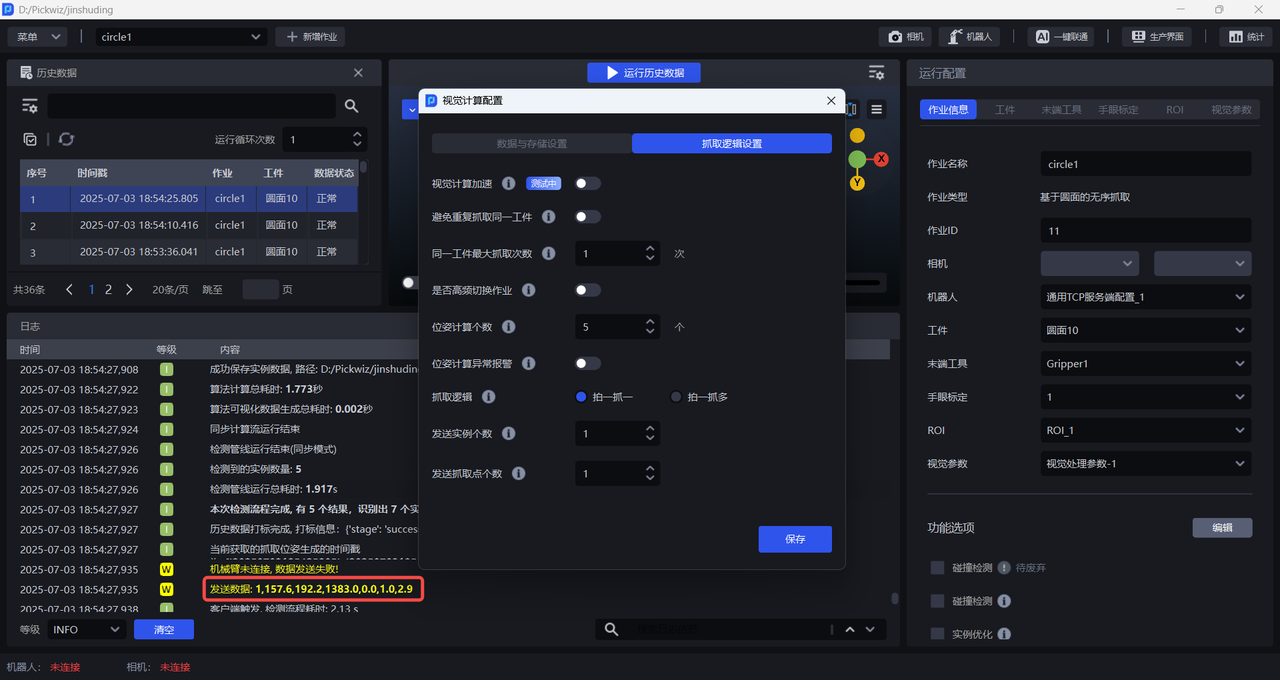
As shown below, 7 instances are detected. Because the Pose Calculation Count is set to 1, the vision system calculates the pose of only 1 instance and generates a Pick Point.
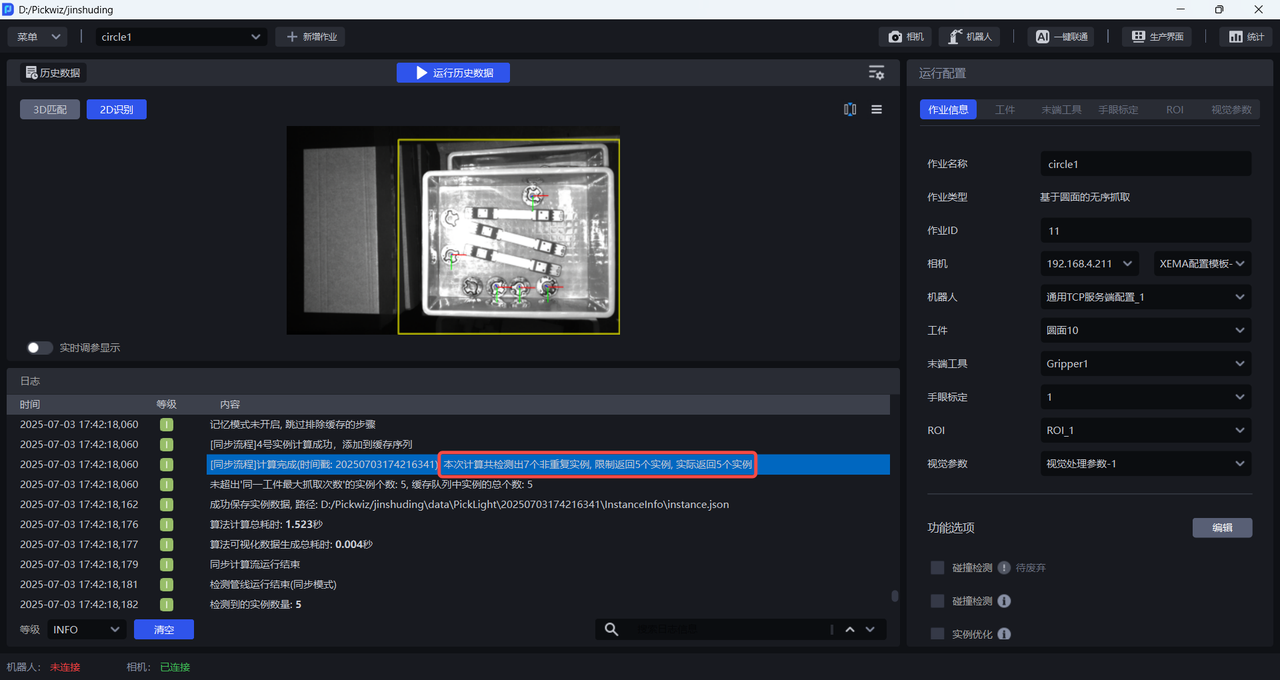
If the Pose Calculation Count is set to 5, the vision system calculates the poses of 5 Target Objects and generates Pick Points.
2.6 Pose Calculation Exception Alarm
After it is enabled, the system calculates Target Object poses one by one according to the instance sorting order. If 3D pose estimation fails, an alarm is triggered;
When it is disabled (disabled by default), if 3D calculation fails, the current Target Object is skipped and the pose of the next Target Object is calculated. No alarm is triggered and the vision process is not interrupted.
It is suitable for ordered scenarios where an alarm is required when missed recognition causes materials to be skipped during sorted picking.
2.7 Picking Logic
2.7.1 One Shot One Pick
One Shot One Pick means the vision system captures one image and performs one calculation. After calculation, the result is sent to the Robot and extra results are discarded. The Robot executes the related picking action, and then the process repeats.
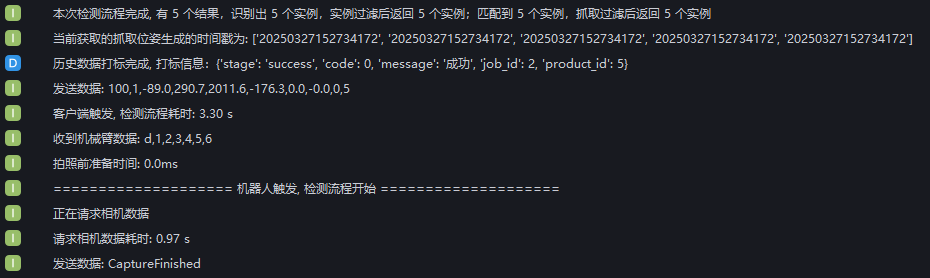
As shown below, when One Shot Multiple Picks is not selected, PickWiz performs image capture and calculation again every time the Robot triggers the detection workflow.
2.7.2 One Shot Multiple Picks
One Shot Multiple Picks means the vision system captures one image and performs one calculation. After calculation, the result is sent to the Robot, and extra Vision Results are saved. The next time the Robot sends an image-capture calculation instruction, if the saved Vision Results meet the requirements, the results are returned directly to the Robot.
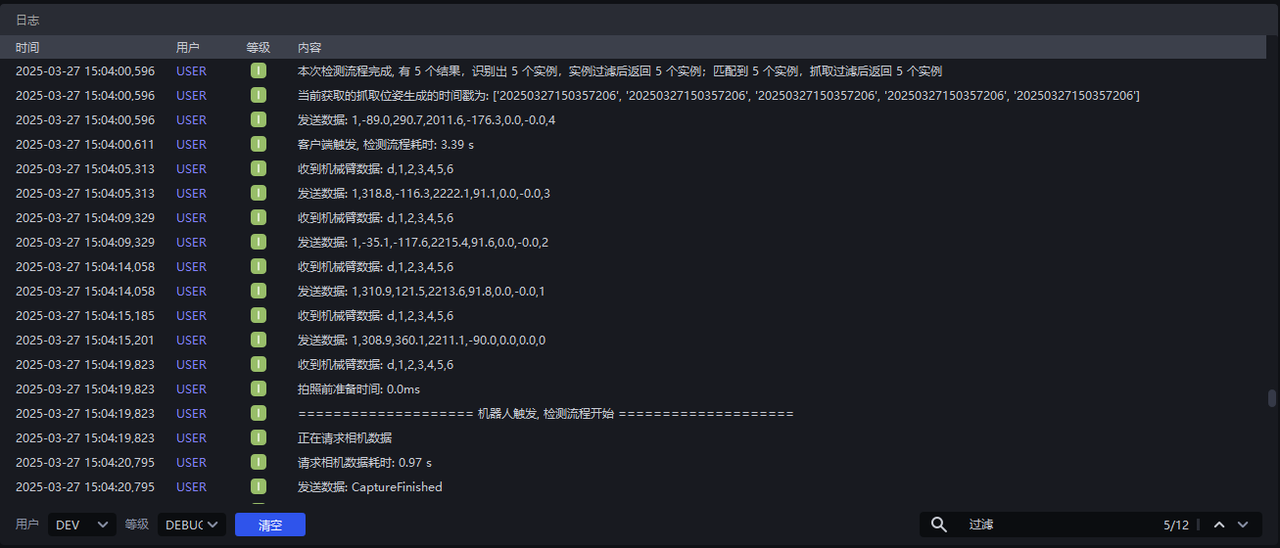
As shown below, when One Shot Multiple Picks is selected, PickWiz can achieve multiple picks after one image capture and calculation. As shown below, 5 instances are detected. The first pick is triggered by PickWiz, and the next 4 picks are triggered by the Robot. During the next 4 picks, the Robot sends pose information to PickWiz to trigger the detection workflow. PickWiz does not perform image capture and calculation again, but directly returns the Picking Pose.
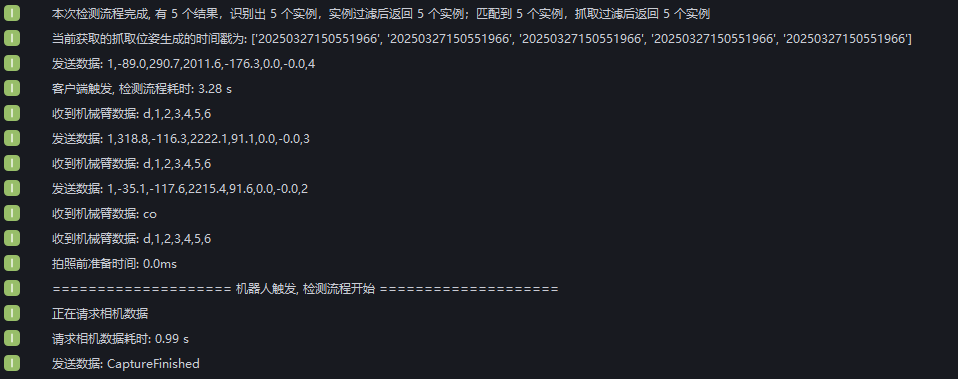
If after picking the 3rd instance the Robot inputs the co command to clear the PickWiz cache, the cached Vision Results of the 4th and 5th instances are cleared. When the Robot triggers the 4th pick, PickWiz performs image capture and calculation again.
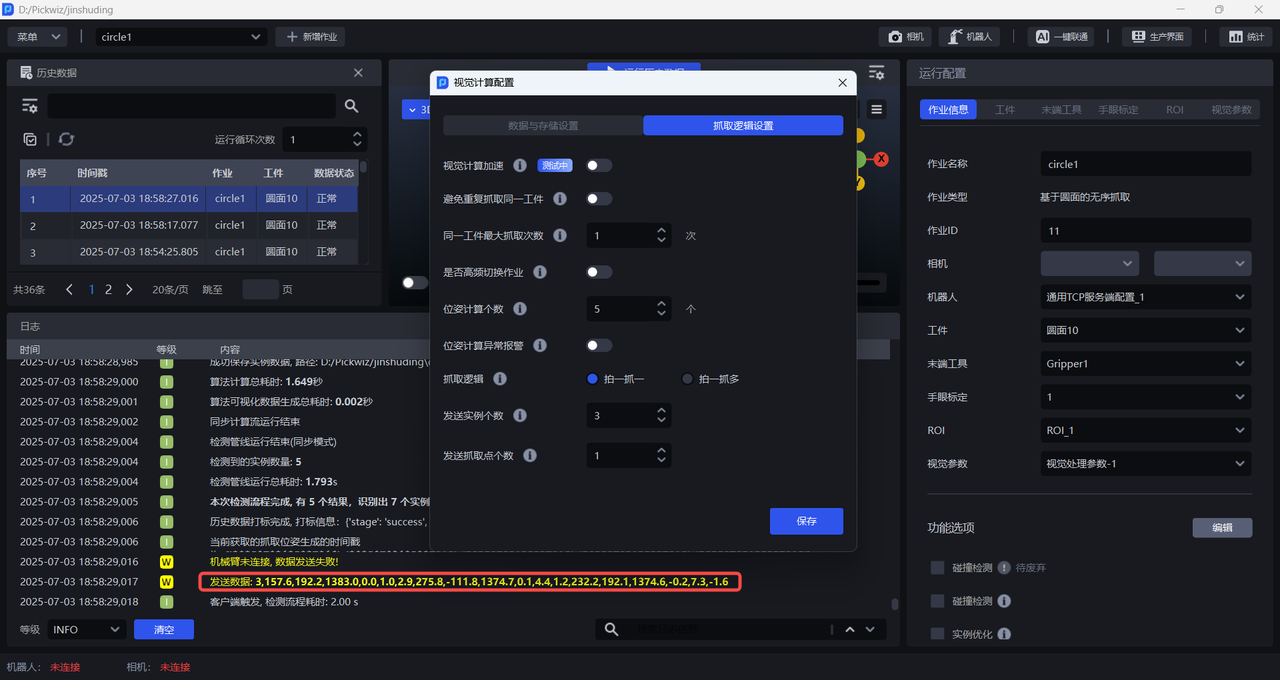
2.8 Sent Instance Count
Indicates how many instances of Vision Results PickWiz sends to the Robot each time. The value is ≥-1, and the default is 1. A value of -1 indicates that PickWiz sends the Vision Results of all instances to the Robot each time.
As shown below, when the Sent Instance Count is set to 1, PickWiz sends the Vision Result of 1 instance to the Robot each time.
When the Sent Instance Count is set to 3, PickWiz sends the Vision Results of 3 instances to the Robot each time, as shown below.
2.9 Sent Pick Point Count
Indicates how many Pick Points of each instance PickWiz sends to the Robot each time. The value is ≥0, and the default is 1.
As shown below, in the General Target Object ordered loading and unloading scenario, only 1 Pick Point is generated for each instance, but the Sent Pick Point Count is set to 2. After running, an error is reported: “The number of Pick Points of the instance does not meet the configured number of Pick Points. Please check the configuration.”
