Calibration Result Inspection and Analysis
After calibration is completed, the calibration result needs to be checked to determine whether the accuracy of the calibration result can meet the accuracy requirements of the actual scenario. If Calibration Error exceeds the normal range, the cause of the error needs to be identified. After the problem is resolved, recalibrate and check again until the calibration result accuracy meets the scenario requirements.
1. Calibration Diagnosis
Click Calibration Diagnosis under Calibration Calculation, and PickWiz will draw the relevant analysis charts in the visualization window on the left.

In the visualization window, you can view the Scene images and error charts of all samples, as well as the sample image, Scene image, and Point Cloud image saved for each sample, as shown below.
1.1 Error Chart
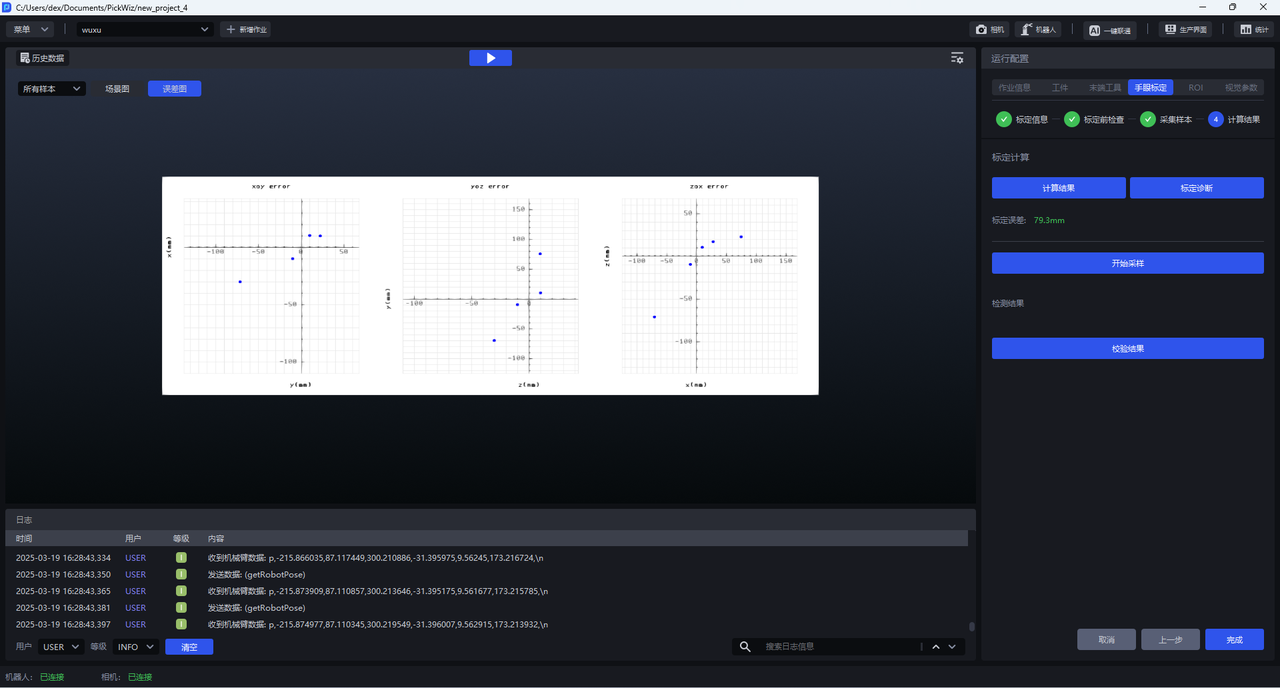
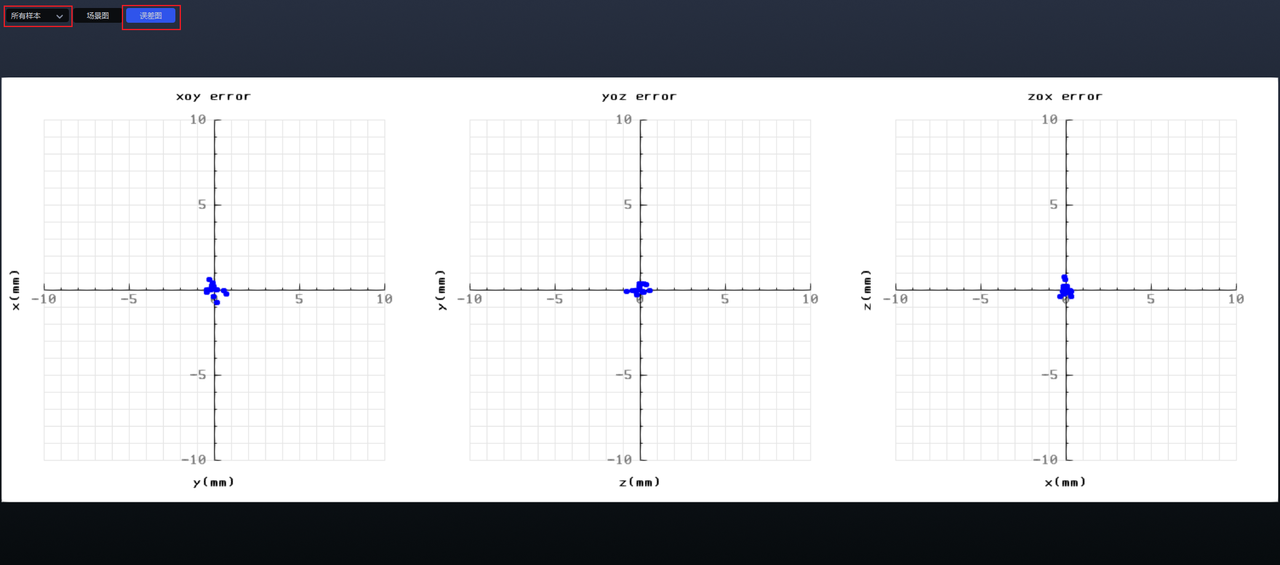
The error chart is used to display the deviation between the true position and the calculated position of each circle center on the Calibration Board. There are 3 error charts, which display the errors on the XoY,YoZ,ZoX planes respectively. On each plane, the true position of the Calibration Board circle center is used as the origin. By observing the deviation of the calculated position on these three planes, you can intuitively see the deviation of each circle center in different directions. One small grid represents an error of one millimeter.
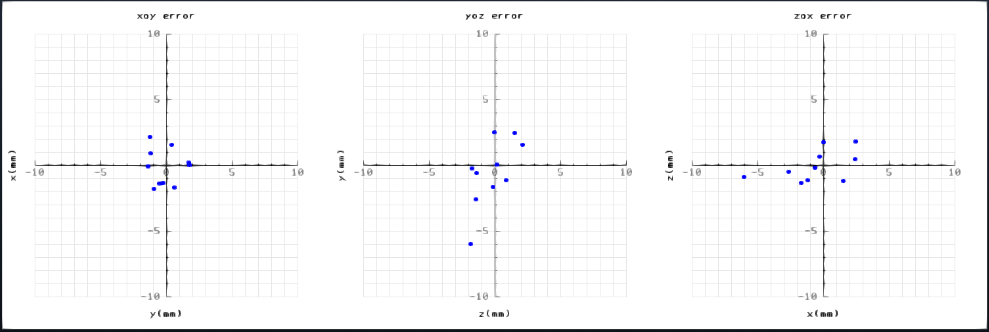
Check the distribution of the dots in the 3 charts. If the dots in all 3 charts are distributed near the center, it indicates that the error between the true position and the calculated position of each circle center on the Calibration Board is small, and the calibration result is usable, as shown below.
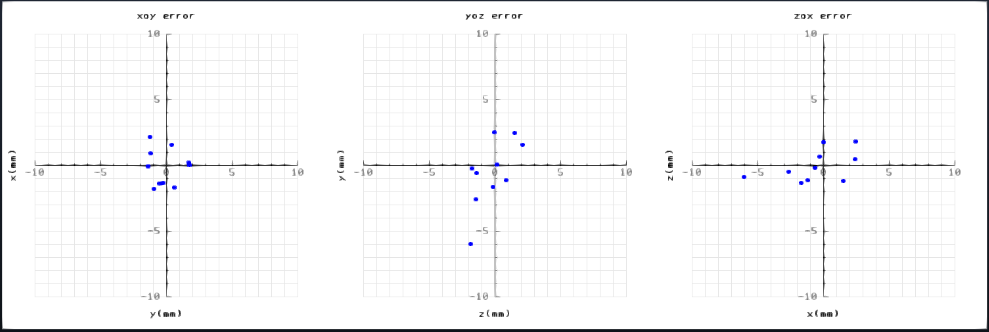
If the dots are distributed discretely, it indicates that the error between the true position and the calculated position of the circle centers on the Calibration Board is large, and the calibration result is unusable. You need to filter sampling samples or recalibrate, as shown below.
1.2 Scene Chart
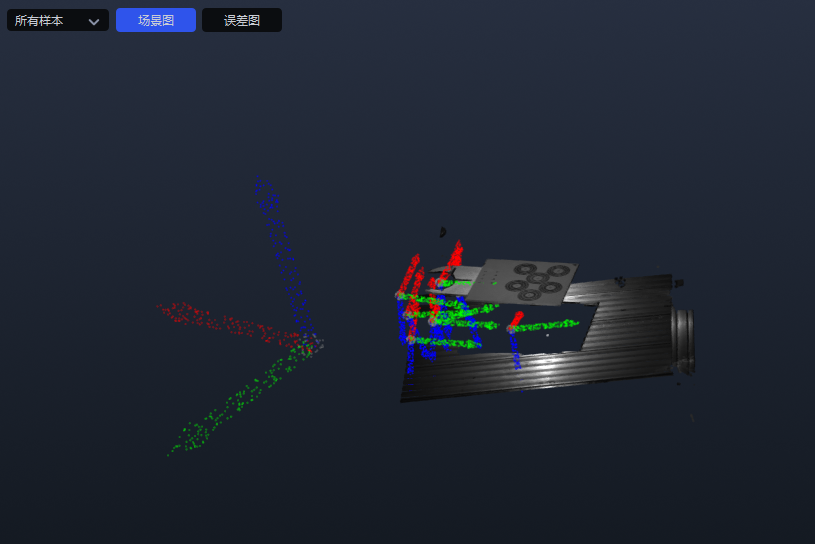
The Scene chart is used to display the posture distribution of the Robot base and the robotic arm end during sampling. The large coordinate axes indicate the base coordinates of the Robot, and the several small coordinate axes indicate the end coordinates of the robotic arm for each sampling.
During calibration diagnosis, only structured-light cameras (Xema, Finch, and Sparrow series cameras) have Scene Point Clouds; stereo cameras (Kingfisher series cameras) do not have Scene Point Clouds
The figure below shows the Scene chart of all samples. You can observe the posture distribution of the robotic arm end. If the robotic arm end is relatively evenly distributed and the coordinate axes have large rotation angles, the calibration result is usable.
If the Scene chart of all samples shows that the robotic arm end is distributed too closely or the coordinate axis rotation angles are small, the calibration result is unusable. You can switch to the Scene Chart of Sample x to view the Robot base coordinates and robotic arm end coordinates for each sampling one by one and find the abnormal sample.
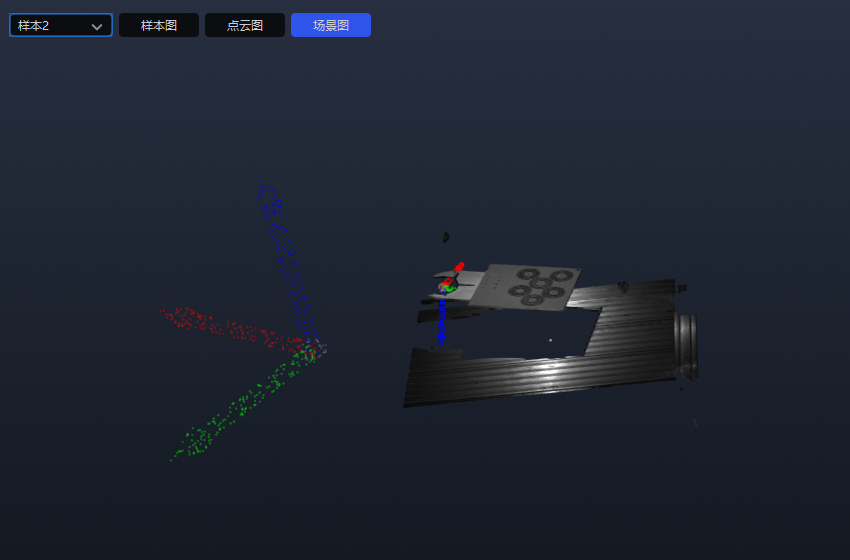
After finding the abnormal sample, if Get Coordinates Online is set to Yes, you should filter sampling samples or recalibrate; if Get Coordinates Online is set to No, you should first check whether the order or unit of the manually entered Robot Pose is incorrect. If there is an error, correct it and click Calculation Results to recalculate the calibration result. If there is no error, you should filter sampling samples or recalibrate.
1.3 Point Cloud Chart
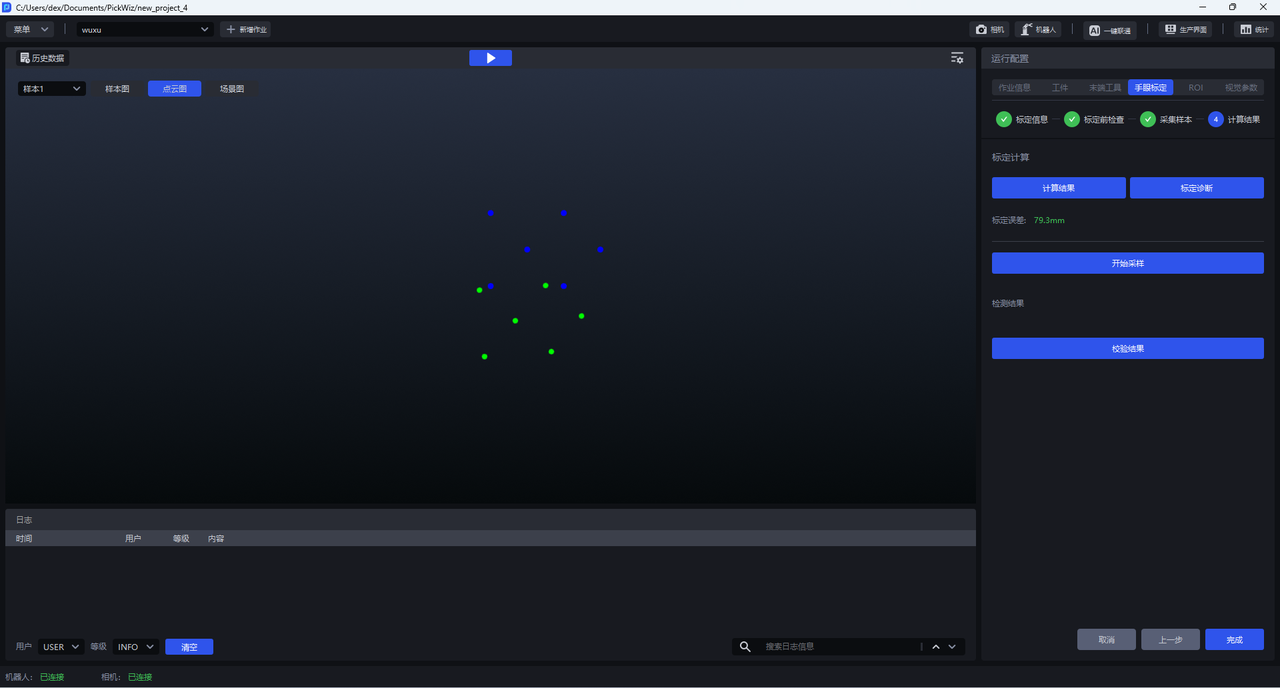
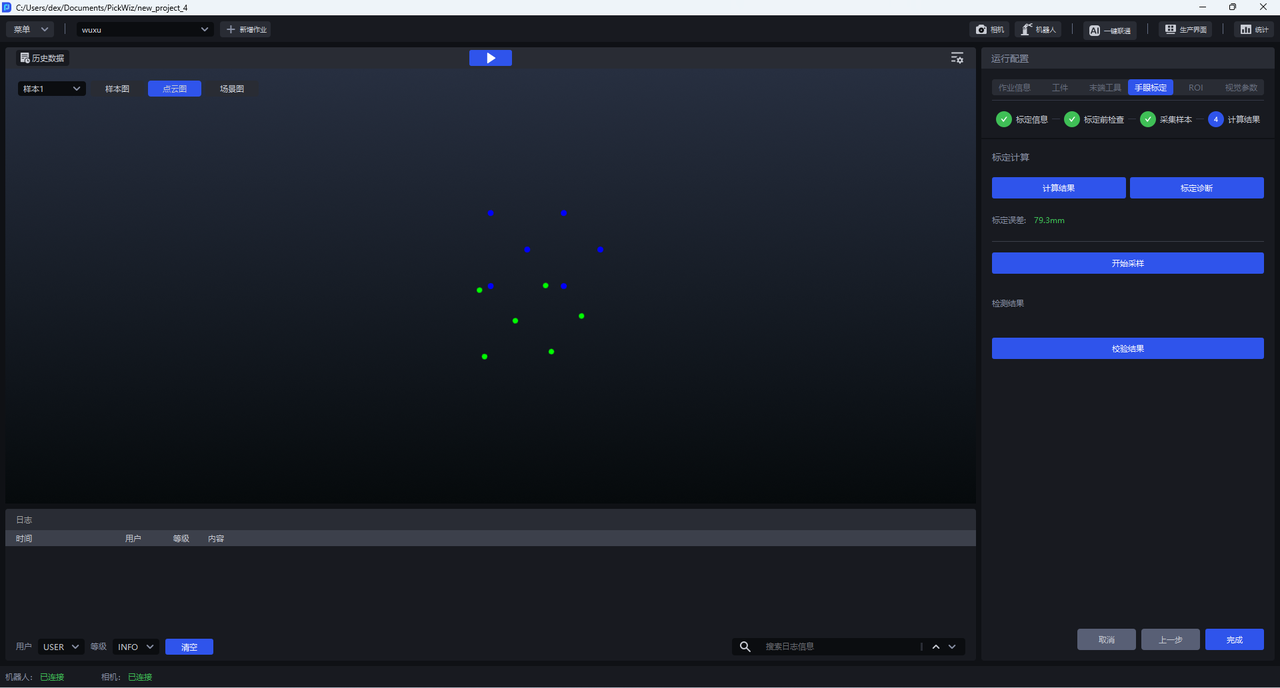
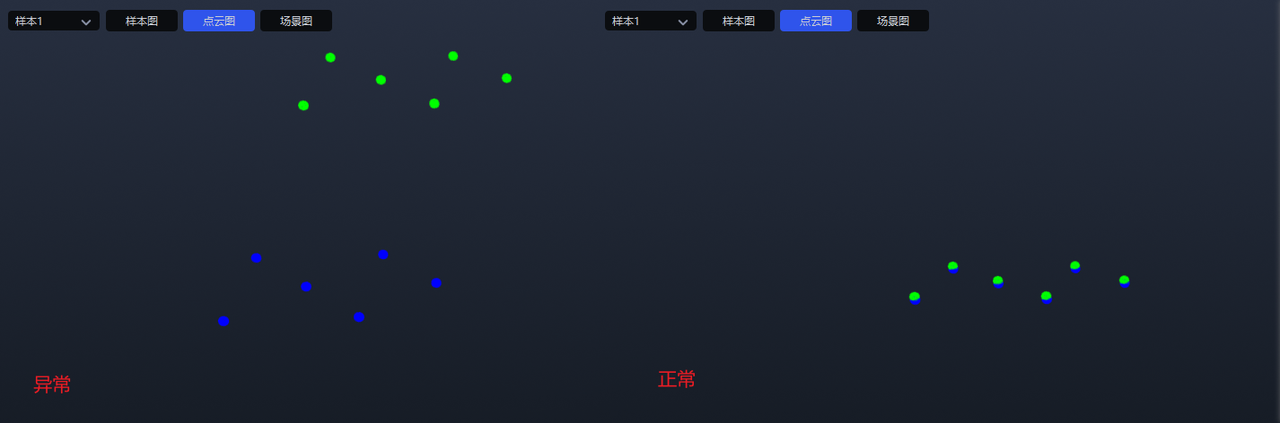
The Point Cloud chart is used to display the reprojection of the Calibration Board during each sampling. The blue points indicate the standard Calibration Board pose, and the green points indicate the pose of the Calibration Board after reprojection. The higher the overlap between the blue points and the green points, the higher the accuracy of the calibration result.
Switch to the Point Cloud Chart of Sample x to view the reprojection of the Calibration Board during each sampling, as shown below.
If the overlap between the blue points and the green points is low or they do not overlap at all, the calibration result is unusable. If Get Coordinates Online is set to Yes, you should filter sampling samples or recalibrate; if Get Coordinates Online is set to No, you should first check whether the order or unit of the manually entered Robot Pose is incorrect. If there is an error, correct it and click Calculation Results to recalculate the calibration result. If there is no error, you should filter sampling samples or recalibrate.
2. Verify the Calibration Result
After eye-hand calibration is completed, you can control the Robot to use the needle-tip Tool to touch a point, compare the coordinates of the robotic arm with the coordinates provided by the vision system, and determine whether the calibration result meets the requirements.
Before verification, you should confirm on the teach pendant that the current Robot coordinate system is consistent with the coordinate system selected during calibration
- Enter the
Calculation Resultsstage and place the Calibration Board used during calibration within the camera field of view.
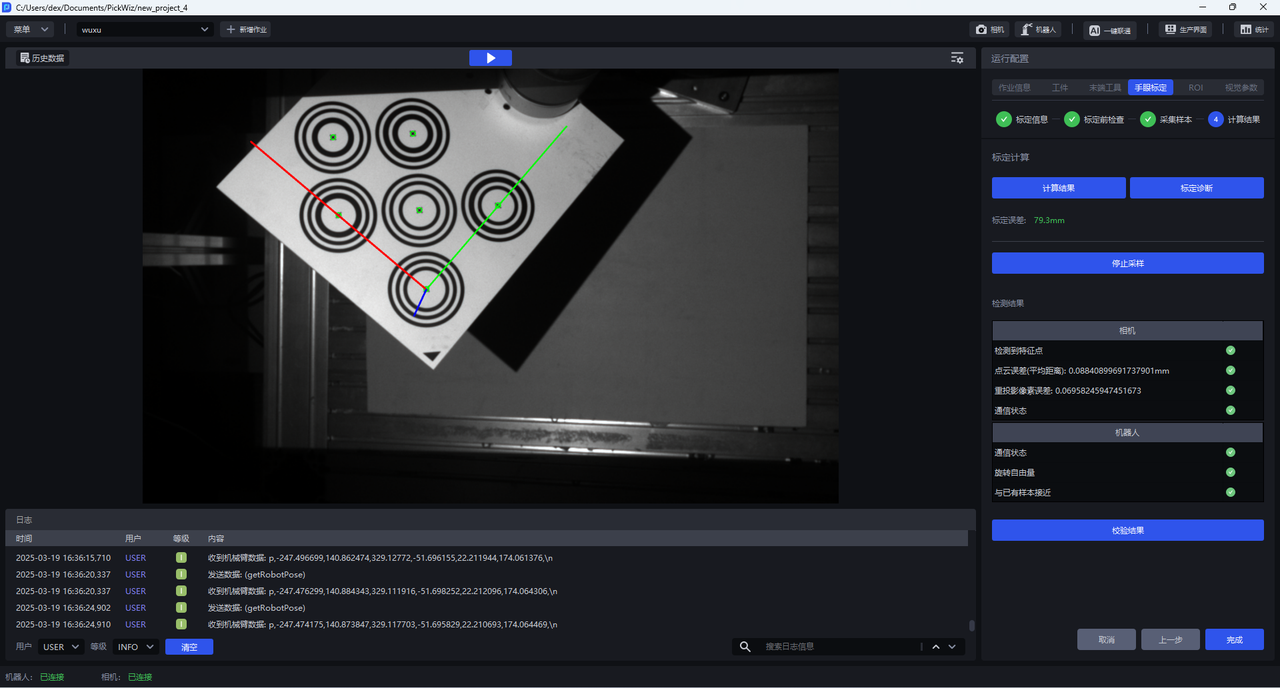
Click
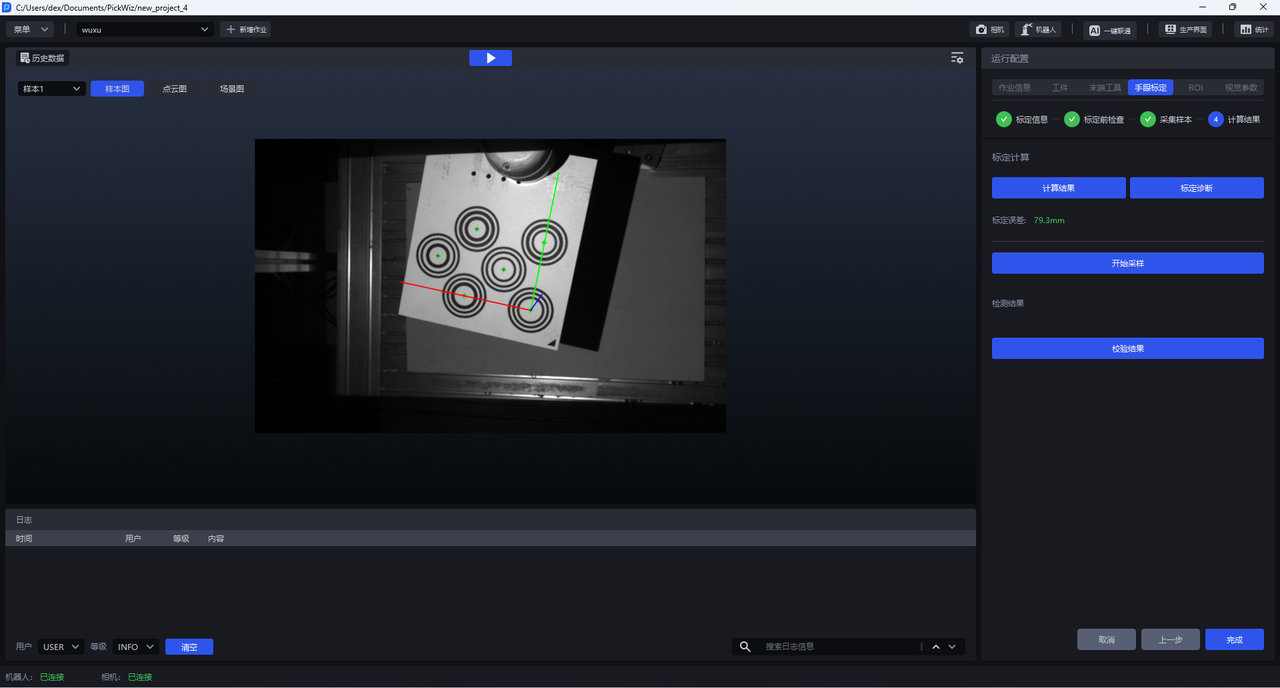
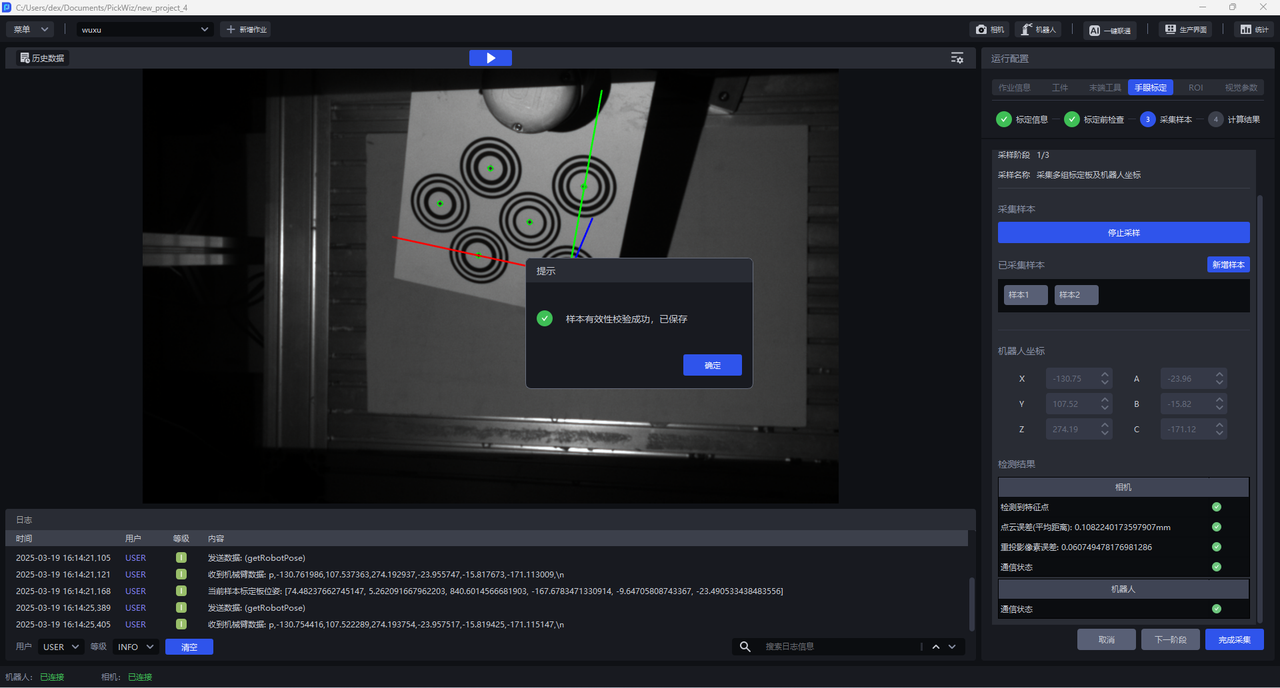
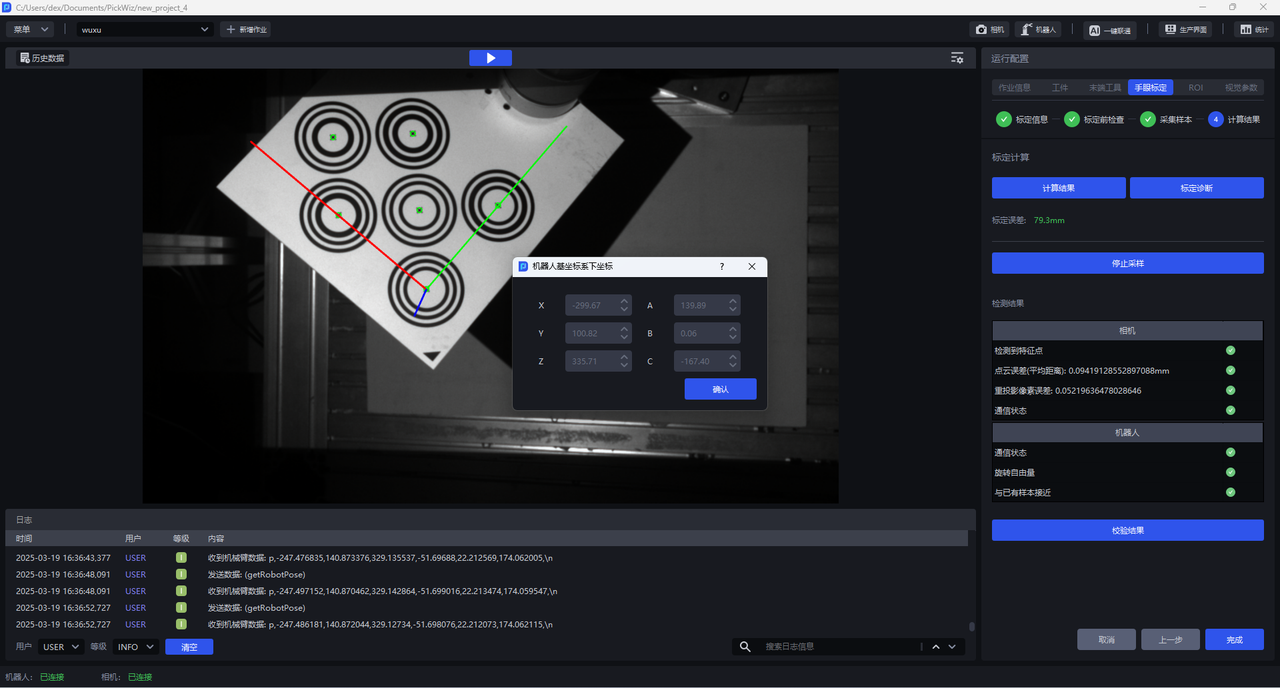
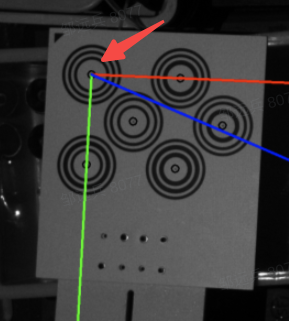
Start Sampling. TheStart Samplingbutton changes toStop Sampling. After both camera detection and Robot detection show green icons indicating success, a coordinate axis will appear on the Calibration Board in the visualization window, and the center of each concentric circle will turn greenClick the
Verification Resultbutton. ACoordinates in the Robot Base Coordinate Systempopup window will appear. This coordinate is the coordinate of the center of the coordinate axis on the Calibration Board in the Robot base coordinate system.
If Get Coordinates Online is Yes, this coordinate is calculated automatically, as shown below.
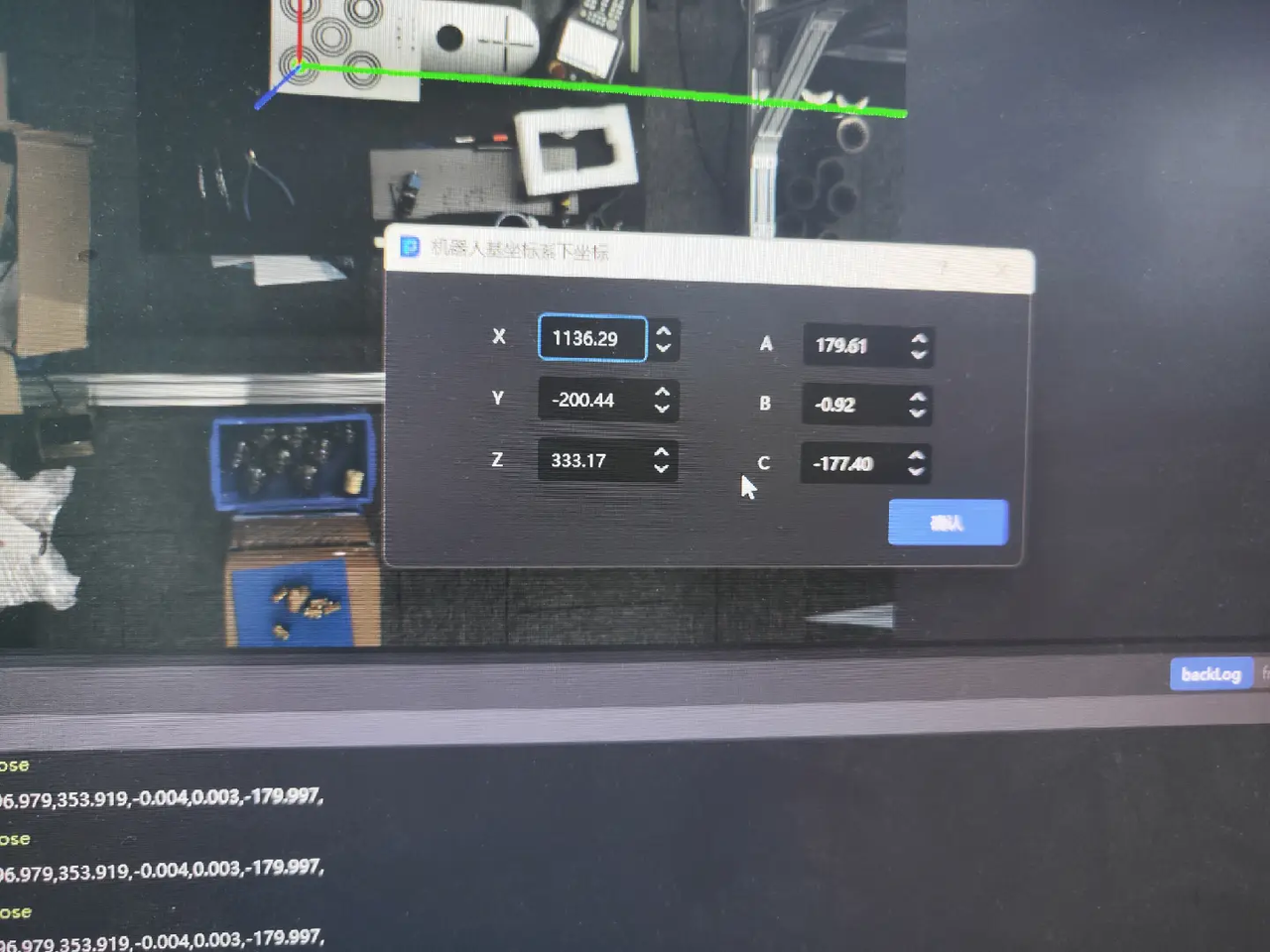
If Get Coordinates Online is No, you need to manually enter this coordinate first, as shown below.
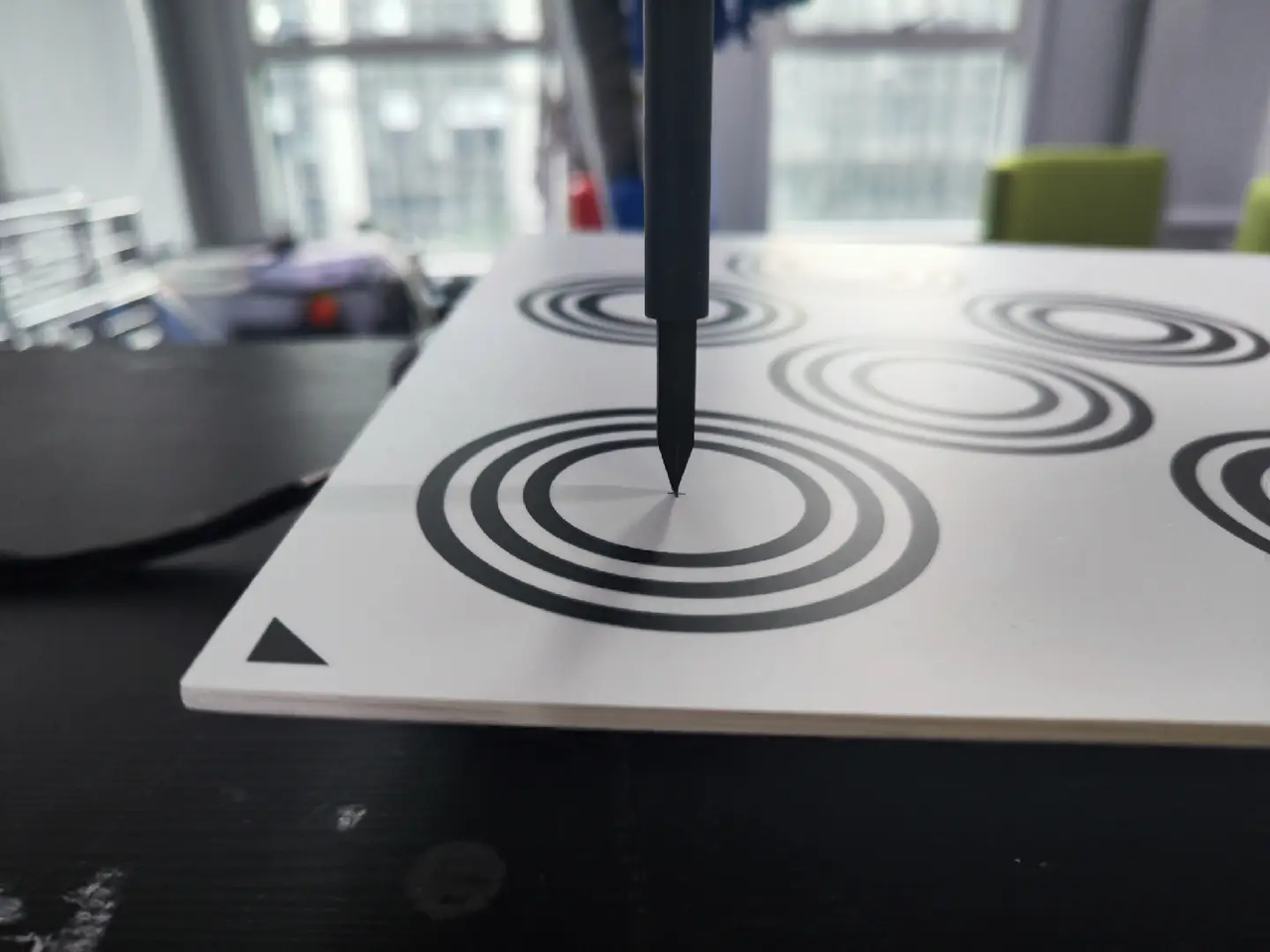
- Install a needle-tip Tool at the end of the robotic arm, create a new tool coordinate system at the end of the needle-tip Tool, and control the Robot to move so that the needle tip points to the center of the coordinate axis on the Calibration Board, as shown below.
- Compare the needle-tip coordinates provided by the vision system at this time with the needle-tip coordinates on the Robot teach pendant to determine whether the accuracy of the calibration result meets the requirements. If the difference between the two is small, the calibration result is usable; otherwise, the calibration result is unusable. You should check whether the order or unit of the manually entered pose is incorrect, and check whether there is a deviation in the needle-tip Tool touch point. If everything is correct, you should recalibrate.
3. Filter Sampling Samples

After clicking Calculation Results, PickWiz filters out samples with excessive error from Collected Samples, and these samples are not included in the final calibration calculation. You can view the grayed-out samples in Collected Samples during the sampling stage, and the filtered sample IDs will be prompted below.
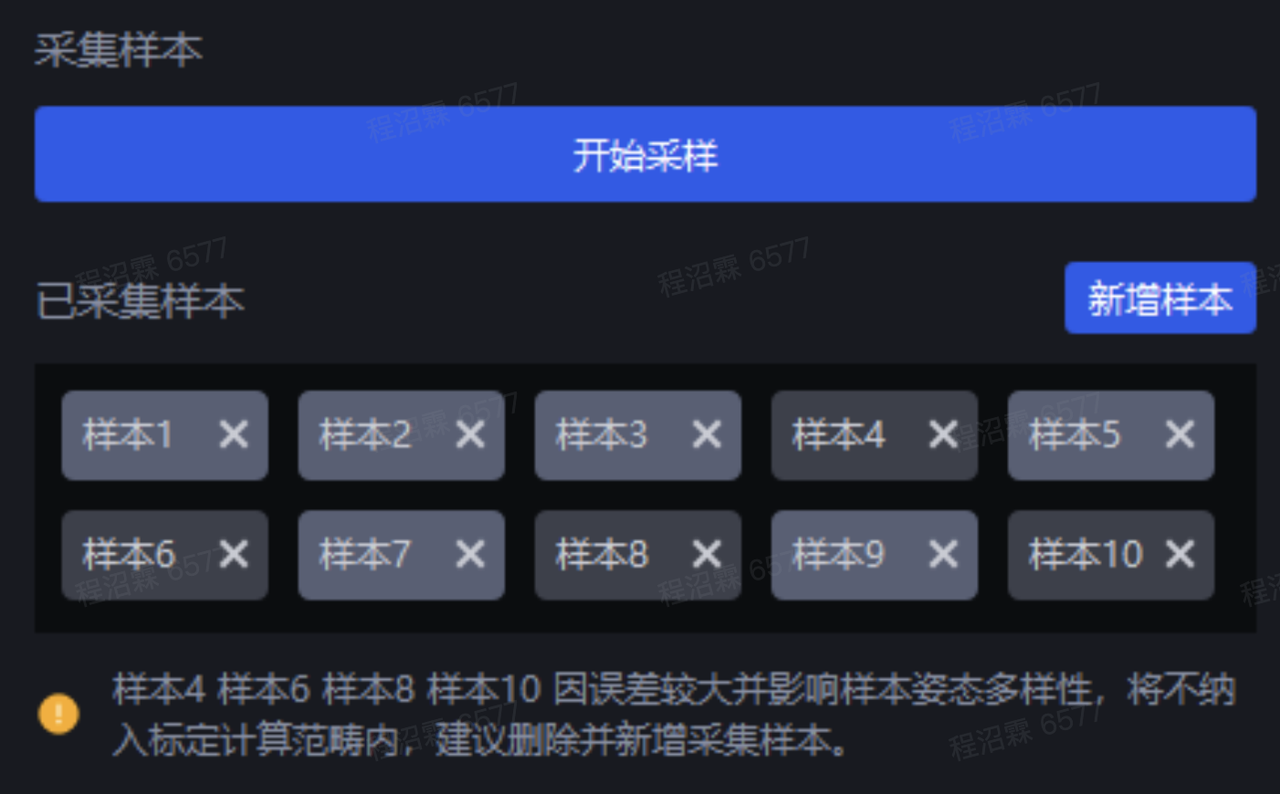
If the Error Chart, Scene Chart, and Point Cloud Chart of the samples in Calibration Diagnosis show good calibration accuracy, keep the filtered samples; otherwise, delete the filtered samples.