Case Library Guide
The Project is the core working unit of PickWiz. A new Project can be created in two ways: create a new scene Project, or load a Project from the Case Library. The Case Library contains specific solutions provided by PickWiz for common typical application scenarios, including the basic configuration data of the scenarios, enabling faster debugging and configuration. The steps to create a Project from the Case Library are as follows:

1. Load a Project from the Case Library
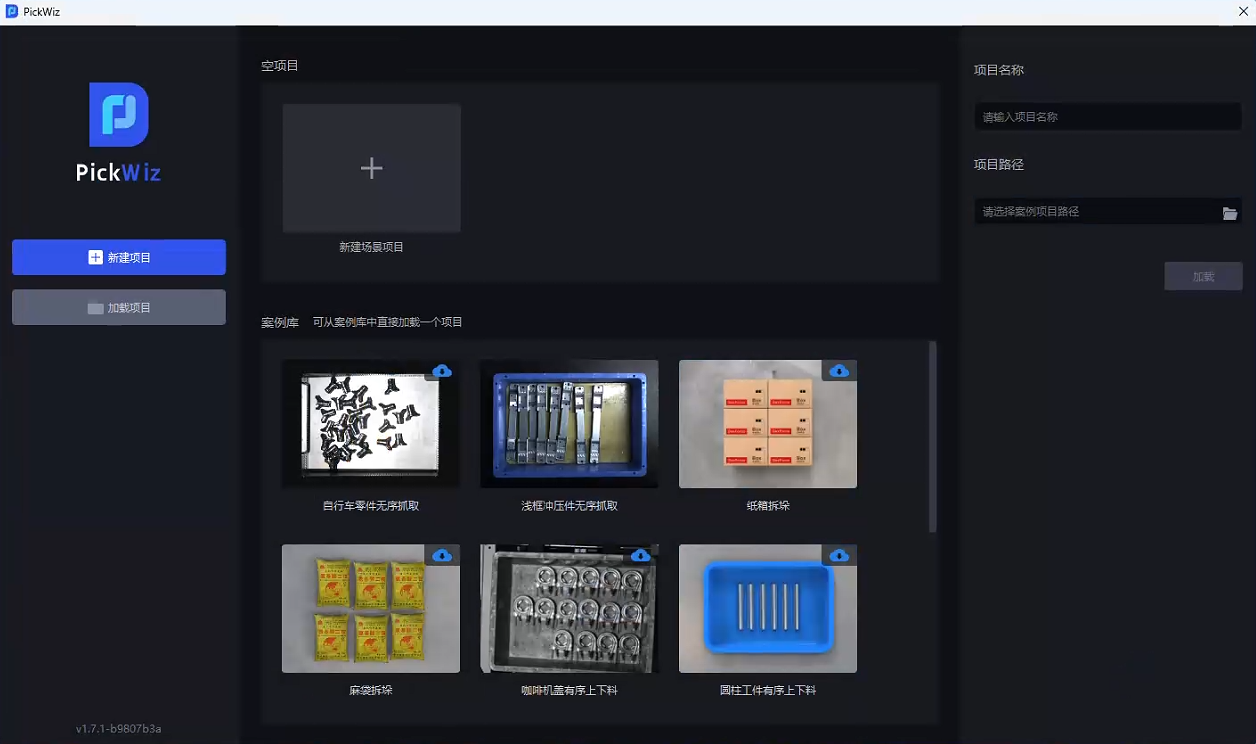
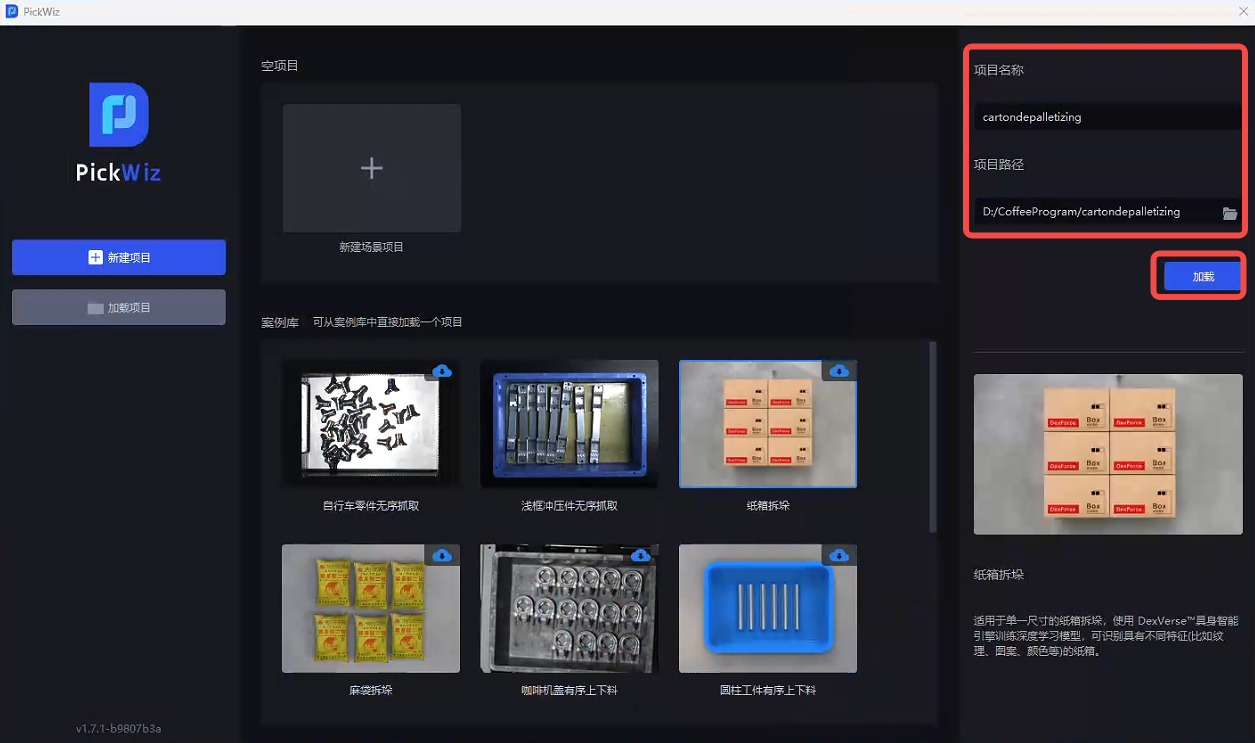
When PickWiz is opened for the first time, it automatically enters the welcome page, where you can select the Project for the required scene from the Case Library, as shown below. If there is no case in the Case Library that meets the scene requirements, click "Create New Scene Project" at the top and refer to Project Operation Guide to create a new scene Project.
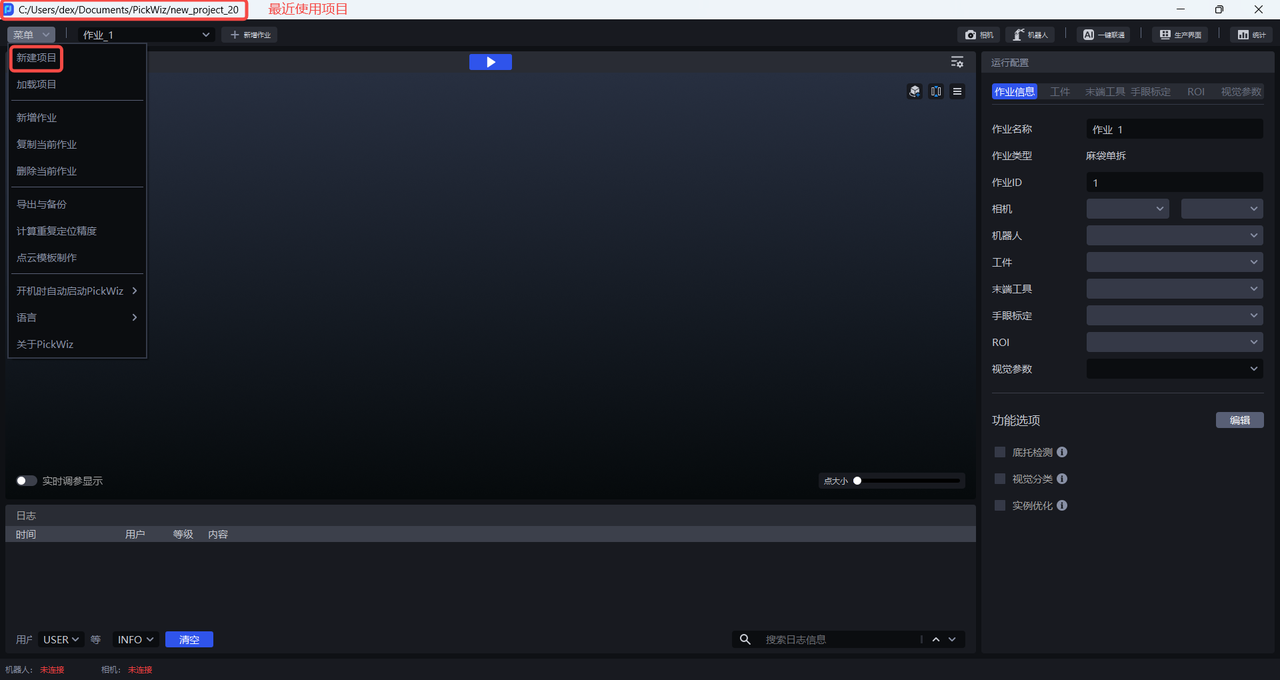
If you have already entered the main software interface, click Menu in the upper left corner and select New Project.
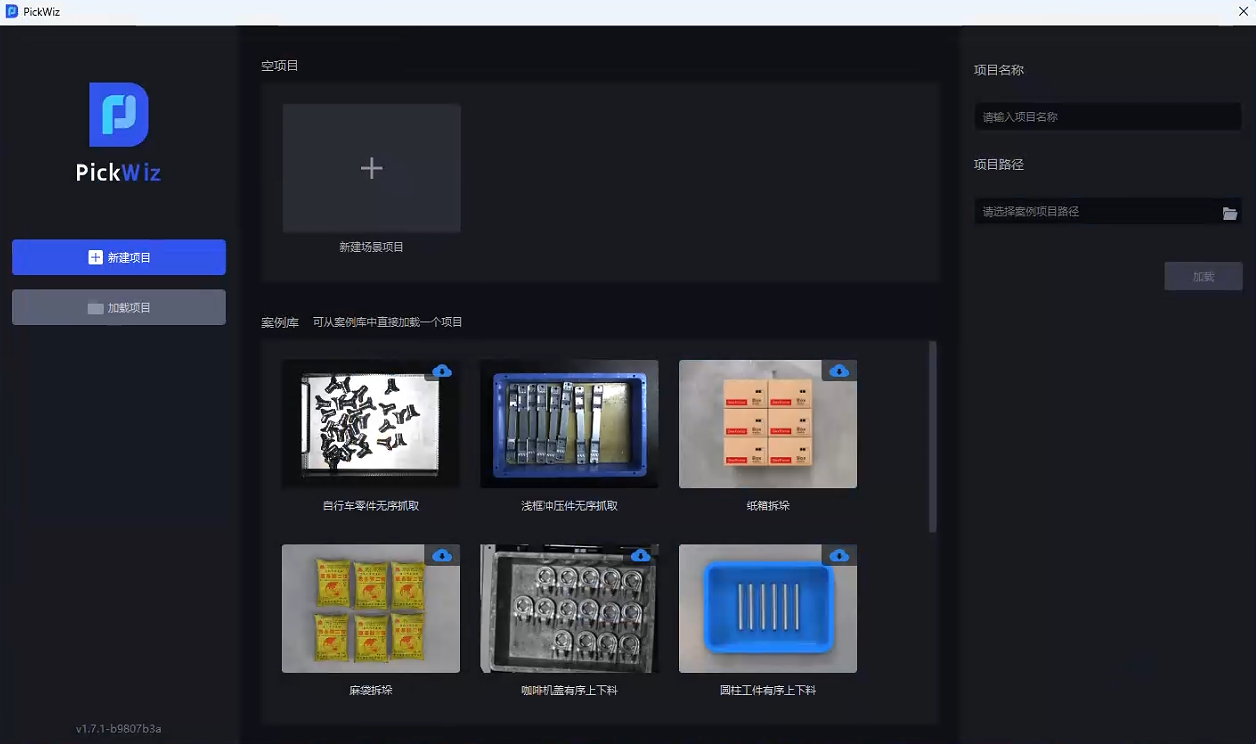
The software will open the new Project interface, where you can select the Project for the required scene from the Case Library. If there is no case in the Case Library that meets the scene requirements, click "Create New Scene Project" at the top and refer to Project Operation Guide to create a new scene Project.
After selecting the required case from the Case Library for the scene, if this is the first time using the case, you need to download it. After the download is complete, a prompt pop-up will appear automatically. Click Confirm.

Note
If this is the first time using the selected case, connect to the Internet and click the blue icon in the upper-right corner of the case to download it.
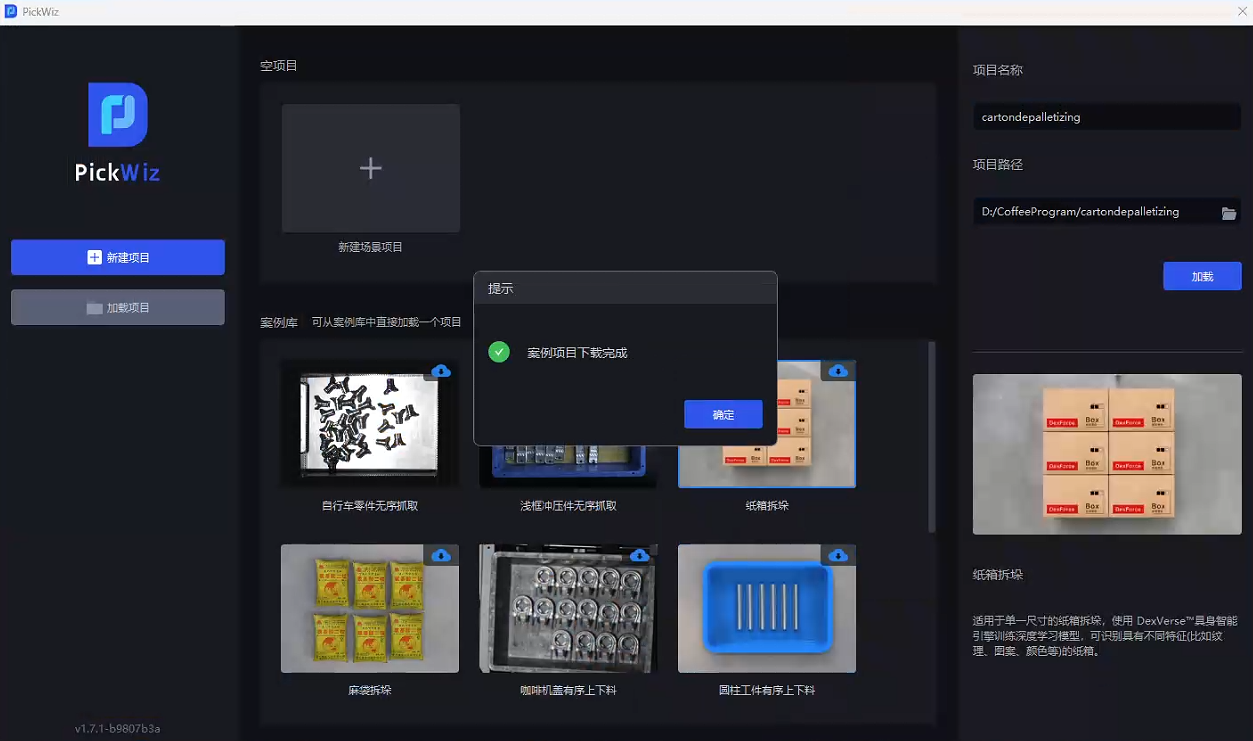
Fill in the Project name on the right, select the Project storage path, and finally click Load to create the solution in the Project storage path.
Note
The Project name supports only uppercase and lowercase English letters and special characters.
2. Project Configuration
After creating a Project from the Case Library, the Project contains the basic configuration data of the task and task scene. You can configure and debug vision-related parameters based on this data. During actual picking, other configurations such as Camera, Robot, and eye-hand calibration need to be added further.
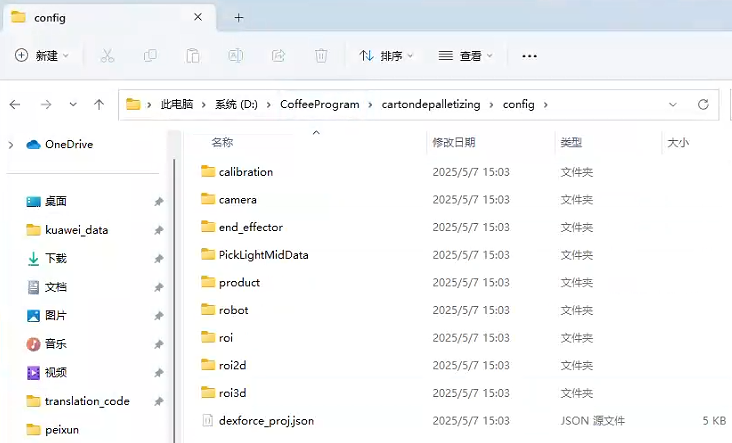
Open the corresponding Project configuration folder config according to the Project storage path set when creating the Project (click here to view), and you can view the configuration data of the Case Library Project, as shown below.
Note
It is not recommended to modify the Project configuration folder; otherwise, PickWiz may report errors abnormally and fail to function properly.
| No. | Folder Name | Configuration Name | Description |
|---|---|---|---|
| 1 | calibration | eye-hand calibration | Stores the eye-hand calibration (new version) configuration when the current task is running |
| 2 | camera | Camera | Stores the Camera and Camera Parameters when the current task is running |
| 3 | end_effector | Tool | Stores the Tool configuration when the current task is running |
| 4 | PickLightMidData | Visualization Configuration | Stores the configuration corresponding to the visualization window |
| 5 | product | Target Object | Stores the Target Object configuration of the current task |
| 6 | robot | Robot | Stores the Robot when the current task is running |
| 7 | roi | ROI | Stores the ROI configuration when the current task is running |
| 8 | roi2d | ROI 2D | Stores the ROI 2D configuration when the current task is running |
| 9 | roi3d | ROI 3D | Stores the ROI 3D configuration when the current task is running |
| 10 | scene_object | Scene Object | Stores various objects in the actual scene of the current task, including containers, bottom pallets, etc. |
| 11 | strategy | Vision Parameters | Stores the vision parameter configuration when the current task is running |
| 12 | dexforce_proj.json | Root Configuration File | The root configuration file of the Project. All configurations corresponding to all tasks in the Project are specified in this file |
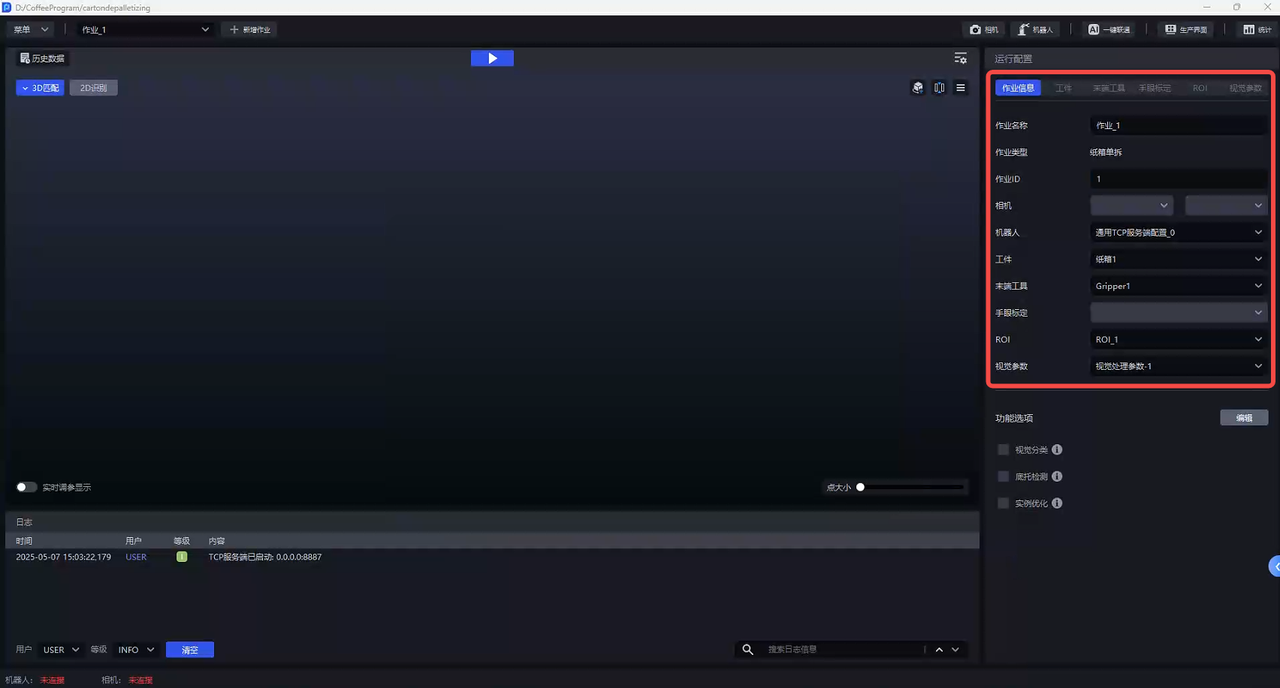
The Project configuration data can be compared with the task information.
| Label | Description |
|---|---|
| task Name | The name of the current task, editable |
| task Type | The type of the current task, that is, the task scene, corresponding to the task scene selected when creating a new Project or creating a new task, and cannot be modified |
| task ID | Identifies the current task. The Robot can switch tasks through this ID |
| Camera | The Camera & Camera Parameters when the current task is running. For connecting the Camera & setting Camera Parameters, refer to Camera Connection and Parameter Tuning Guide |
| Robot | The Robot when the current task is running. For establishing communication with the Robot, refer to Robot Configuration and Communication Operation Guide |
| Target Object | The Target Object configuration of the current task. Add it in the Target Object interface and then configure it to the task information |
| Tool | The Tool configuration when the current task is running. Add it in the Tool interface and then configure it to the task information |
| Scene Object | Various objects in the actual scene of the current task, including containers, bottom pallets, etc. Add them in the Scene Object interface and then configure them to the task information |
| eye-hand calibration | The eye-hand calibration configuration when the current task is running. Add it in the eye-hand calibration interface and then configure it to the task information |
| ROI | The ROI configuration when the current task is running. Add it in the ROI interface and then configure it to the task information |
| Vision Parameters | The vision parameter configuration when the current task is running. Configure it in the Vision Parameters interface |
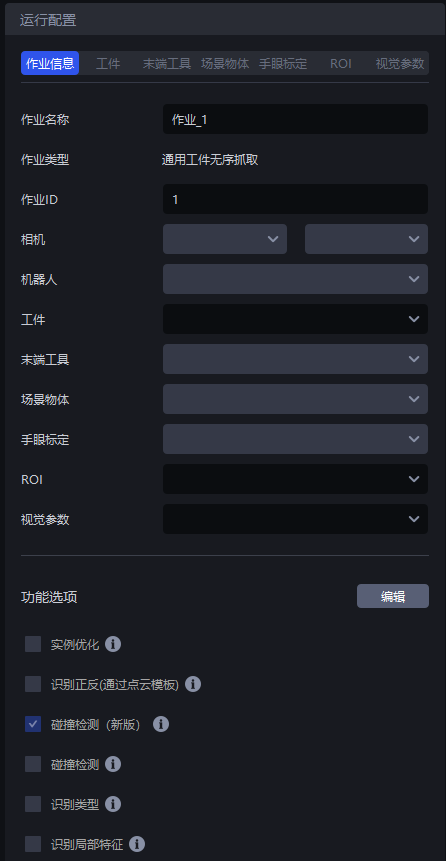
| Feature Options | Click “Edit” to select scenario attributes such as “Collision Detection”, “Recognition Type”, “Recognize Local Features”, and “Bottom Pallet Detection”. After the scenario attributes related to the Project are selected, PickWiz will match the functional configurations adapted to the scenario attributes, that is, it will add the configurations related to the selected scenario to relevant configurations such as Target Object and Vision Parameters. |