附录
8.1 产品参数表
| W1 Pro 产品参数表 | ||
|---|---|---|
| 整机 | 机体类型 | 全身 |
| 场景类型 | 自主移动场景 典型行业:数采训练、科研教育、商用服务、工业制造 | |
| 长宽高(站立) | 682 mm × 550 mm × 1636 mm | |
| 重量 | 107kg(不同版本存在细微差别) | |
| 全身自由度 | 34 | |
| 躯干参数 | 颈部自由度:2| 腰部自由度:2| 腿部自由度:2 | |
| 正常运行温度范围 | 0ºC ~ 40ºC | |
| 移动功能 | 运动方式 | 差速 |
| 底盘自由度 | 2 | |
| 导航移动方式 | 激光 SLAM | |
| SLAM 导航移动重复定位精度 | ≤±20 mm,±2° | |
| 运动方向 | 差速底盘:前进、后退、自旋 | |
| 直行速度 | 直行额定速度0.75m/s 根据工况不同,建议工作速度0.4-0.75m/s | |
| 自旋速度 | 自旋最大速度75deg/s 自旋额定速度60deg/s(3s内完成180度旋转) | |
| 额定通行宽度 | 整机宽度+400mm | |
| 过缝宽度 | 30mm | |
| 越障高度 | 10mm | |
| 爬坡能力 | ≤ 3° | |
| 感知功能 | 头部视觉 | 6 cm基线仿人双目纯视觉+大模型双目算法 |
| 头部视觉视场角 | 90°*60° | |
| 机械手腕部视觉 | 标配:无 可选配:双手均可安装腕部RGBD相机 | |
| 导航雷达 | 2pcs,底盘对角安装 | |
| 导航避障视觉 | 2pcs,底盘前、后中心安装 | |
| 补能功能 | 电池类型 | 磷酸铁锂电池 |
| 电池电压 | 48V | |
| 电池容量 | 40Ah | |
| 充电方式 | 手动充电/自动回充 | |
| 额定充电电流 | 【HW 0.22】10A 【HW 0.23】35A | |
| 手动充电满充时间【30%至100%】 | 【HW 0.22】≤4h 【HW 0.23】≤1.5h | |
| 自动回充满充时间【30%至100%】 | 【HW 0.22】≤4h 【HW 0.23】≤1.5h | |
| 交互功能 | 声光交互 | 具备 |
| LLM语音交互 | 标配 | |
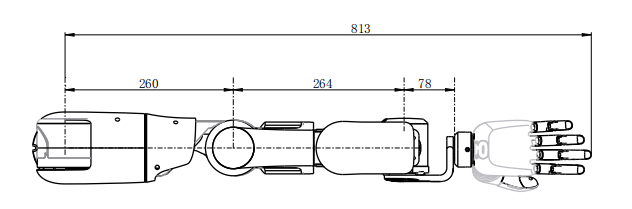
| 机械臂 | 单臂自由度 | 7DOF(肩部3个,肘部1个,腕部3个) |
| 单臂额定负载 | 5kg | |
| 驻车状态下手臂重复定位精度(不含手) | ±2 mm | |
| 最大伸展距离 (不含手) | 1612mm | |
| 末端机械手 | 末端机械手类型 | 默认配置:灵巧手 支持选配:二指夹爪 |
| 自由度(单只) | 灵巧手:6主动自由度、类人的五指方案 | |
| 电控模块 | 续航时间(原地操作场景) | ≥8h |
| 计算机和算力 | 标配双PC架构,≥300TOPS | |
| 其他 | 高频运控 | 1kHz |
| 自动手眼标定 | 具备 | |
| 智能 OTA升级 | 具备 | |
| 二次开发 | 具备 | |
| 遥操功能 | 具备 |
8.2 硬件参数配置
8.2.1 坐标系,关节旋转轴与关节零点
当各个关节均为零度时,各关节坐标系如下图。
| 部件名 | 关节轴 | 坐标系 |
|---|---|---|
| 整体 | 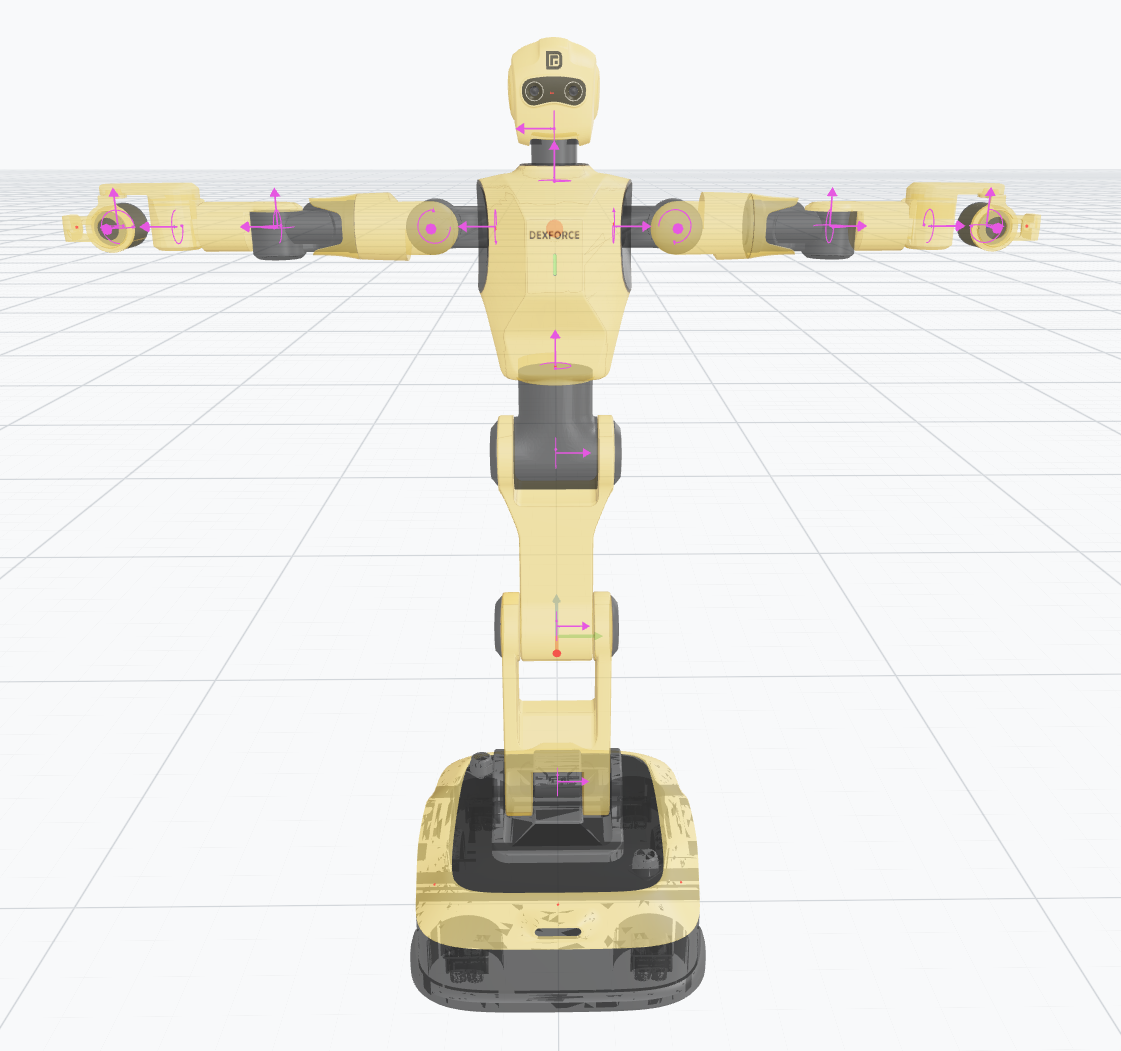 | 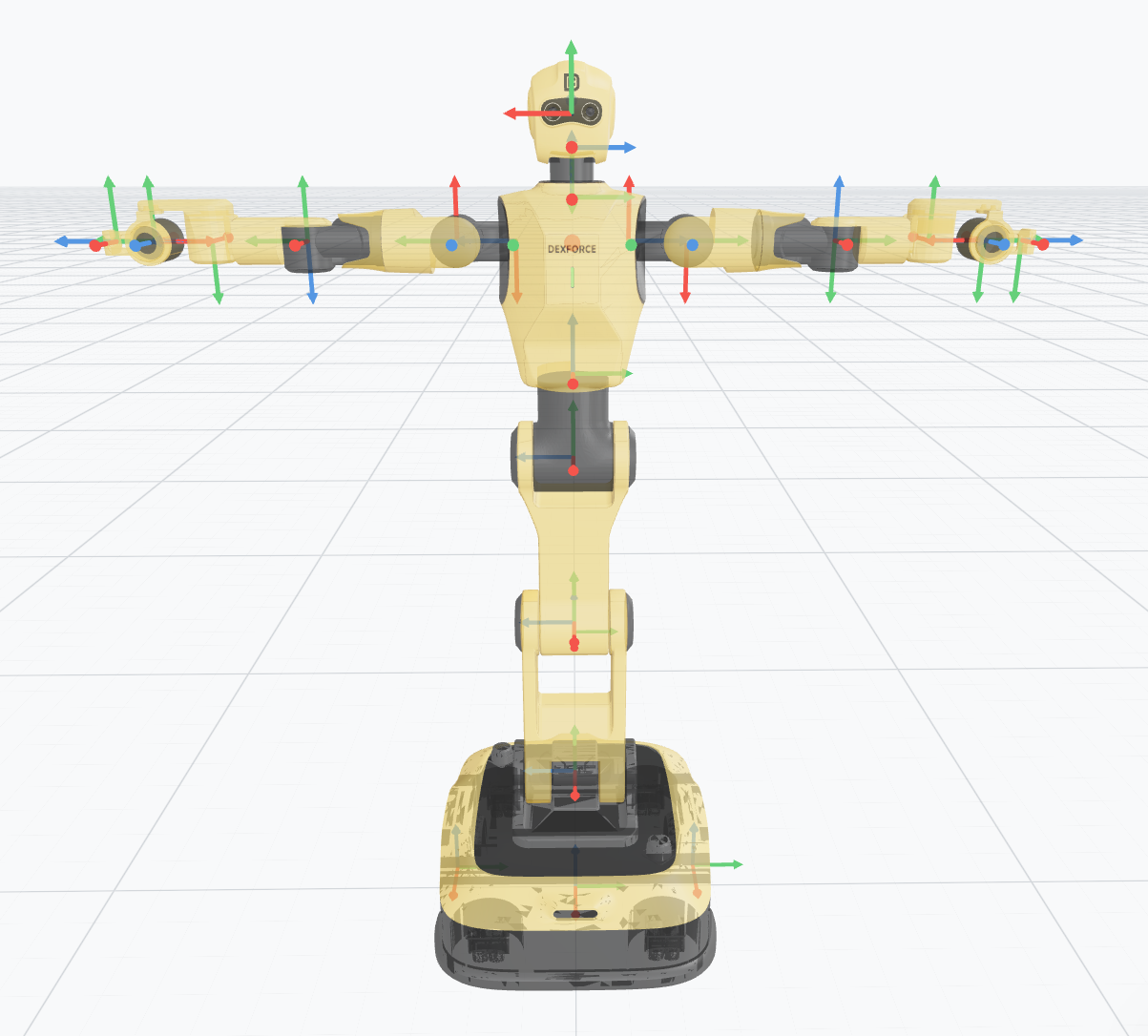 |
| 头部 | 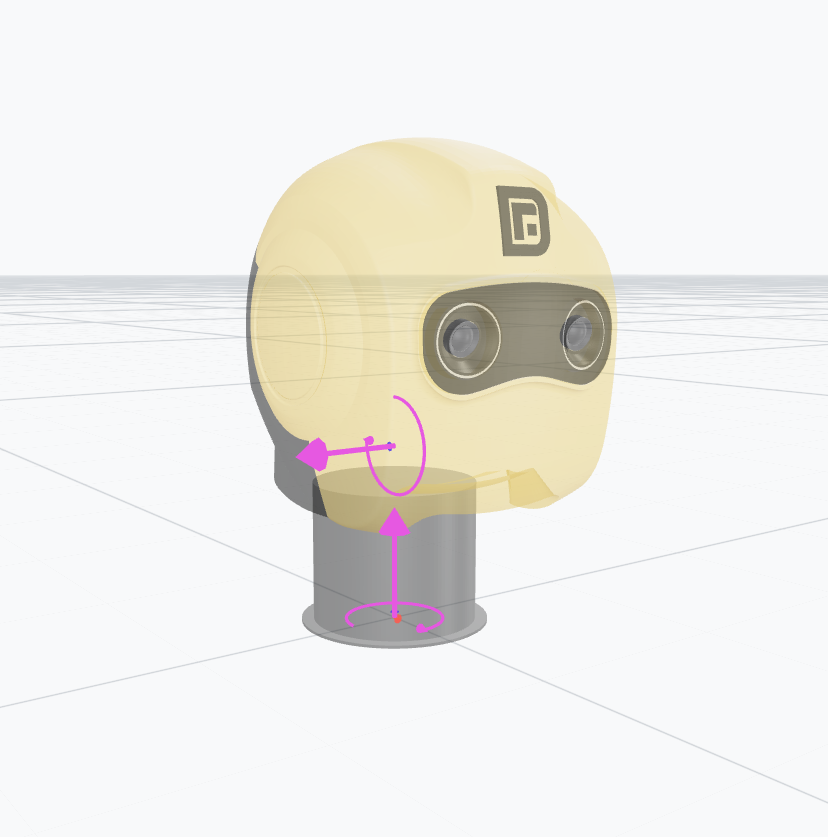 | 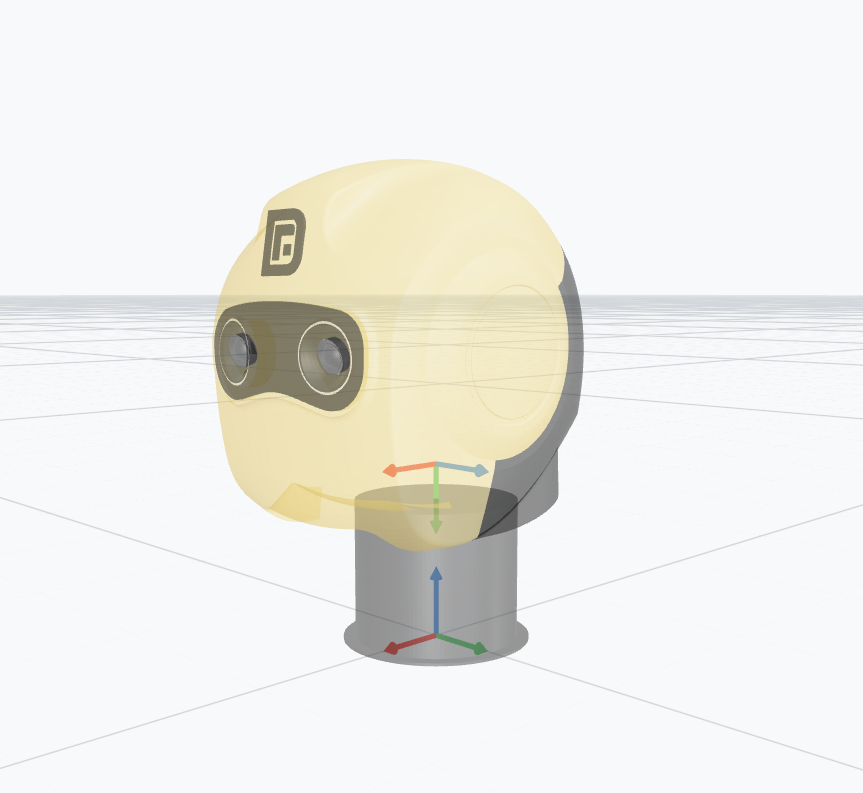 |
| 躯干 | 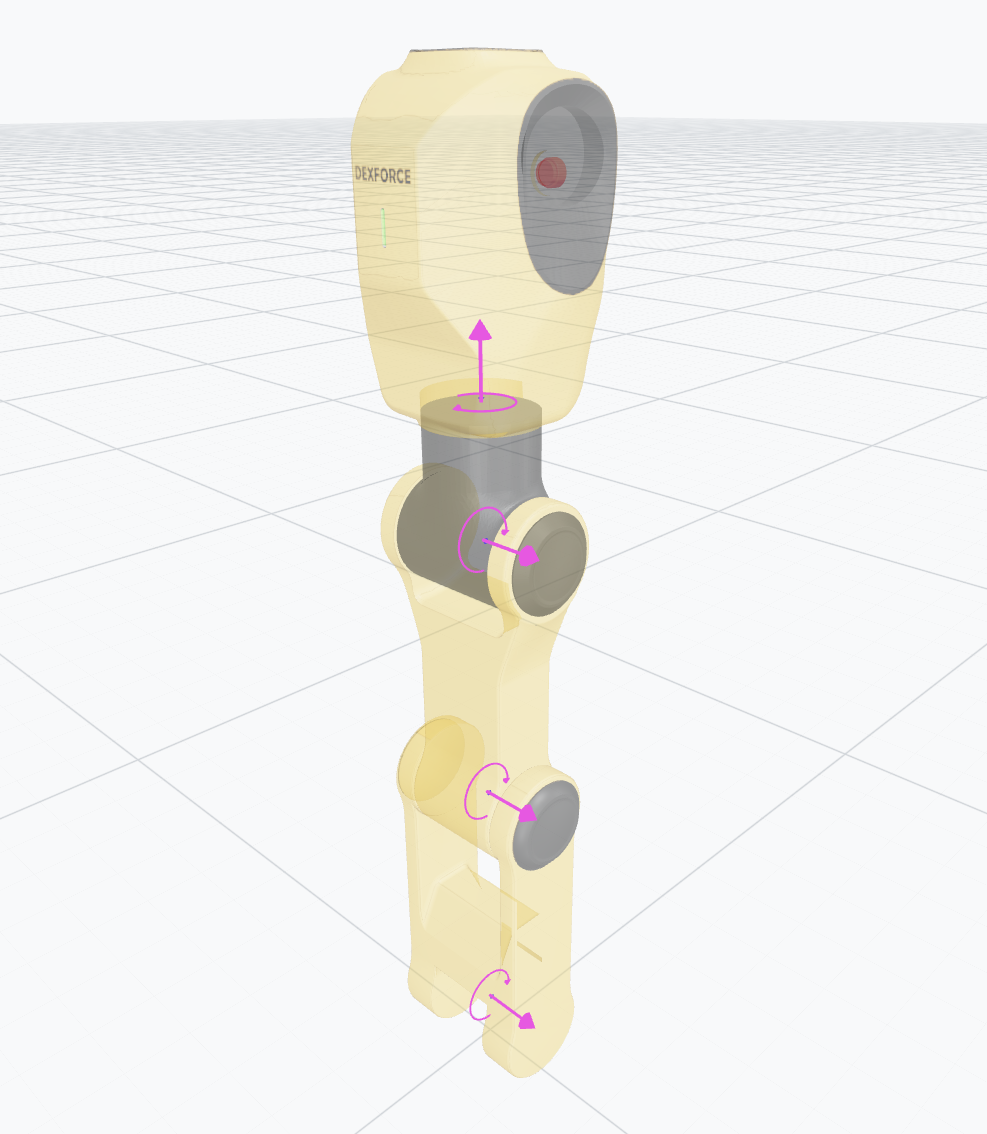 | 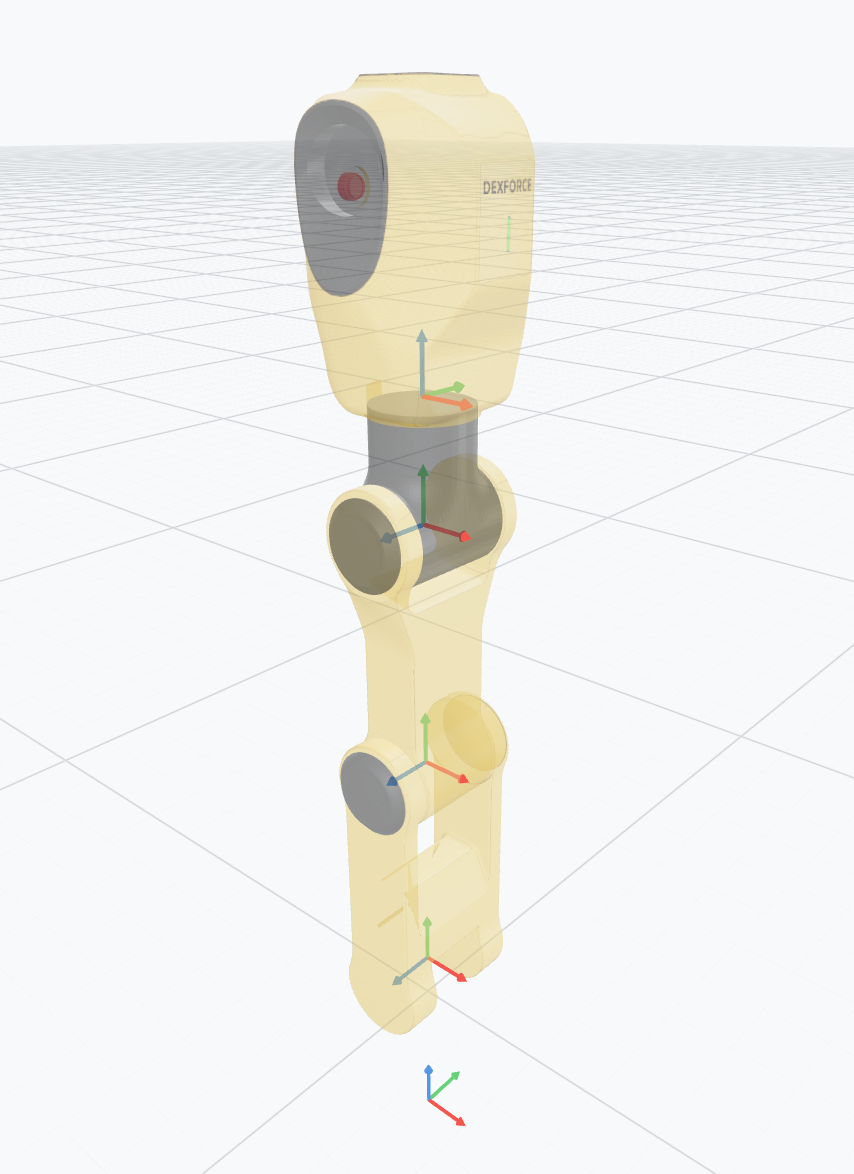 |
| 左臂 | 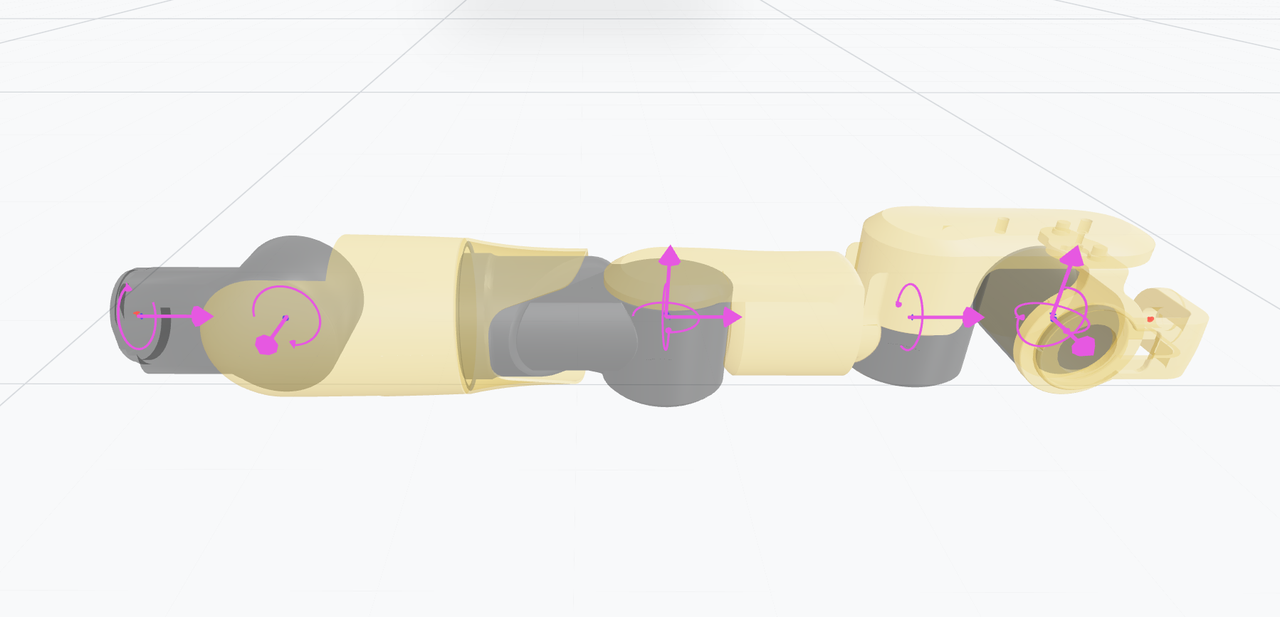 | 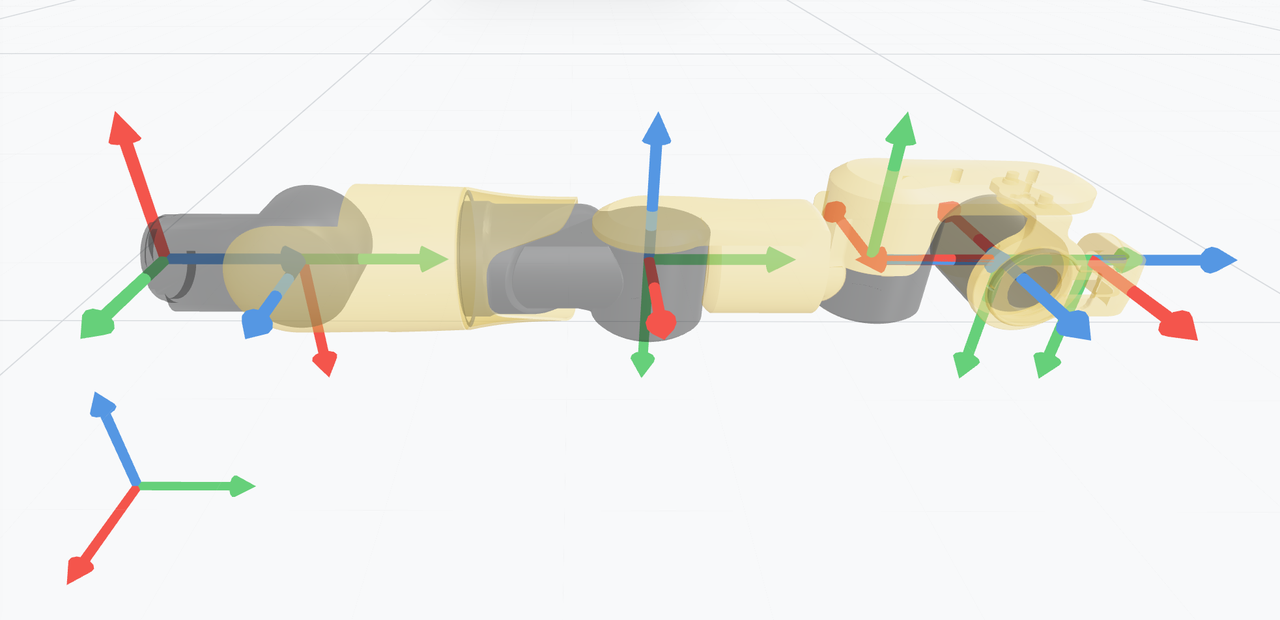 |
| 右臂 | 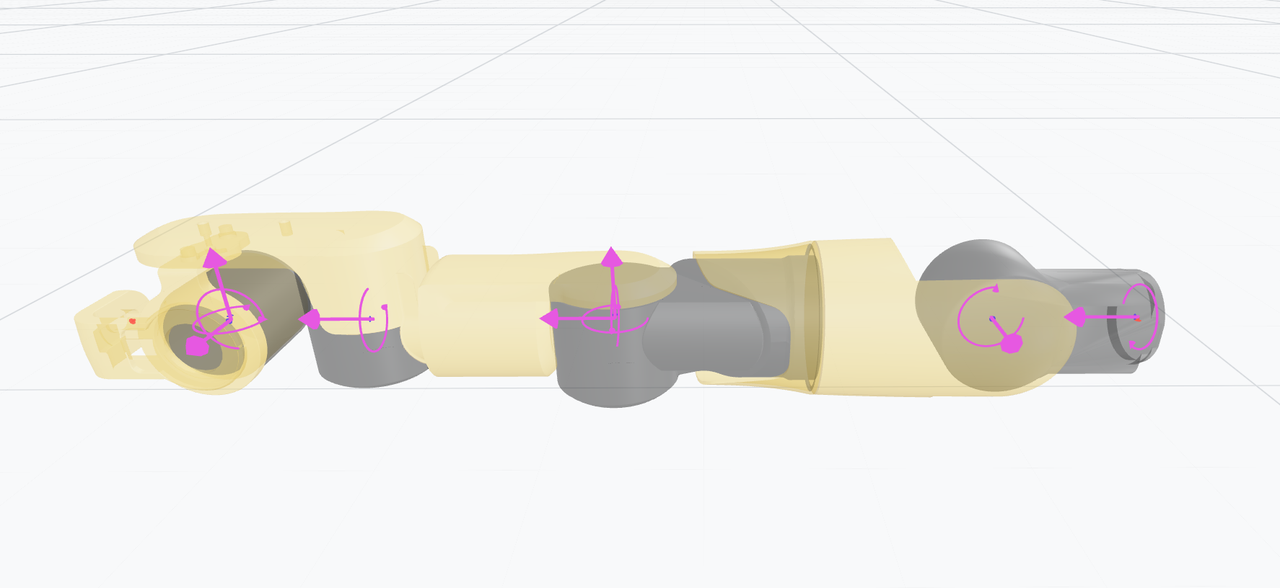 | 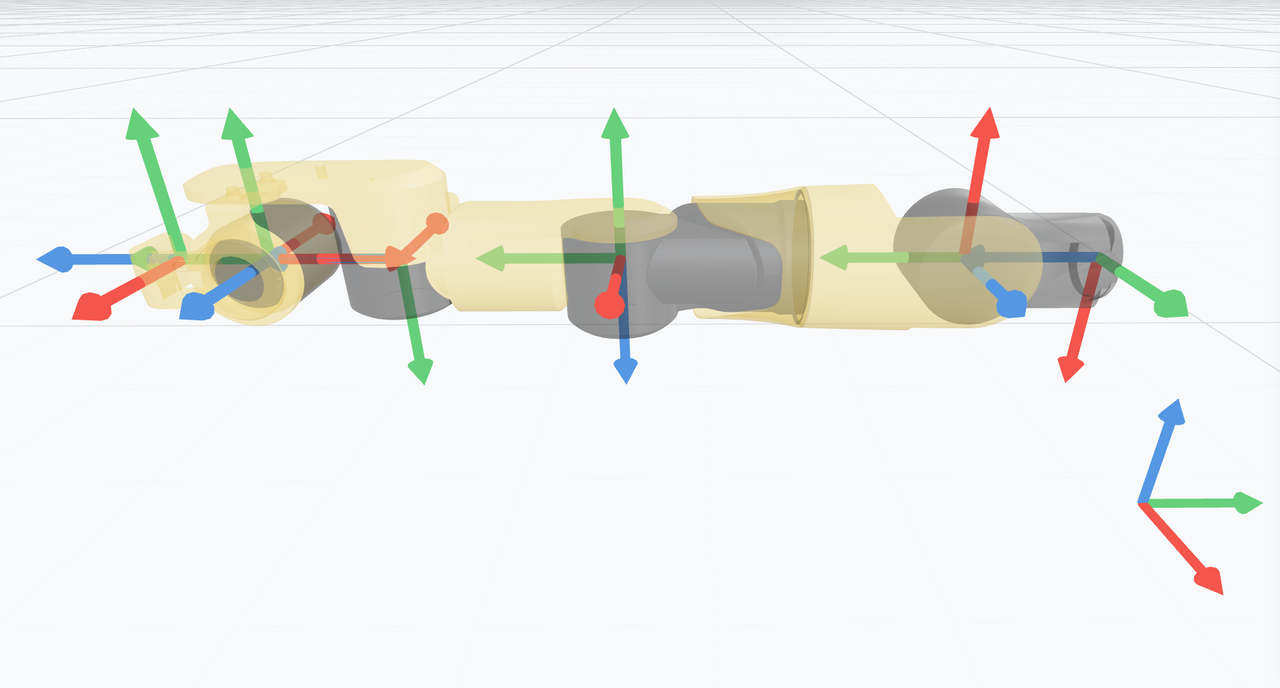 |
| 左臂末端 | / | 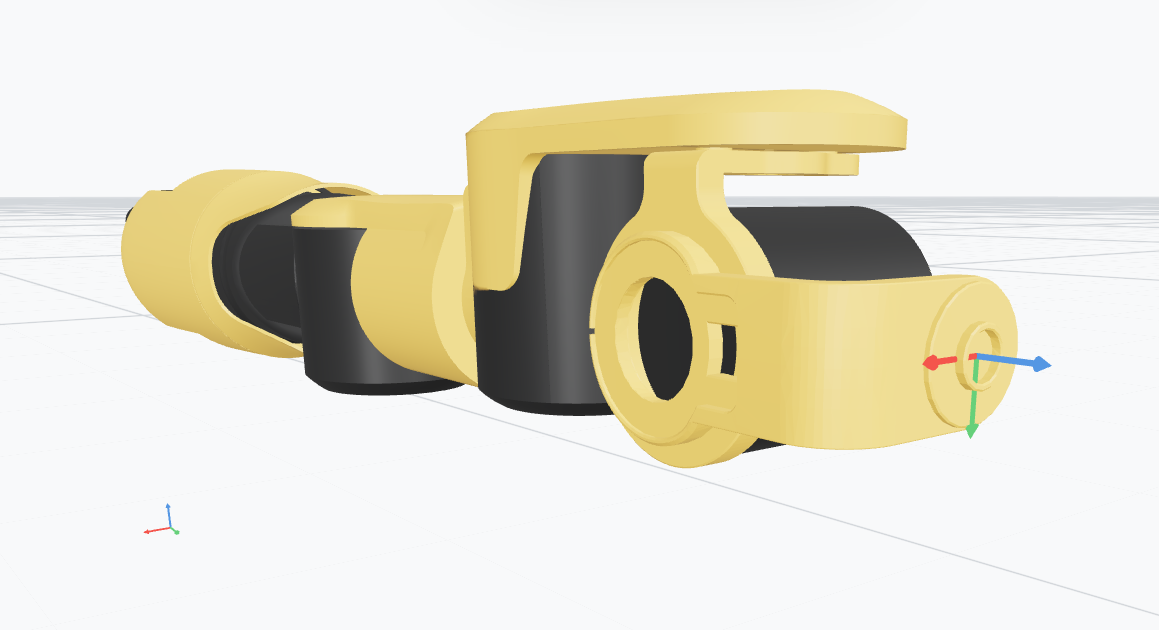 |
| 右臂末端 | / | 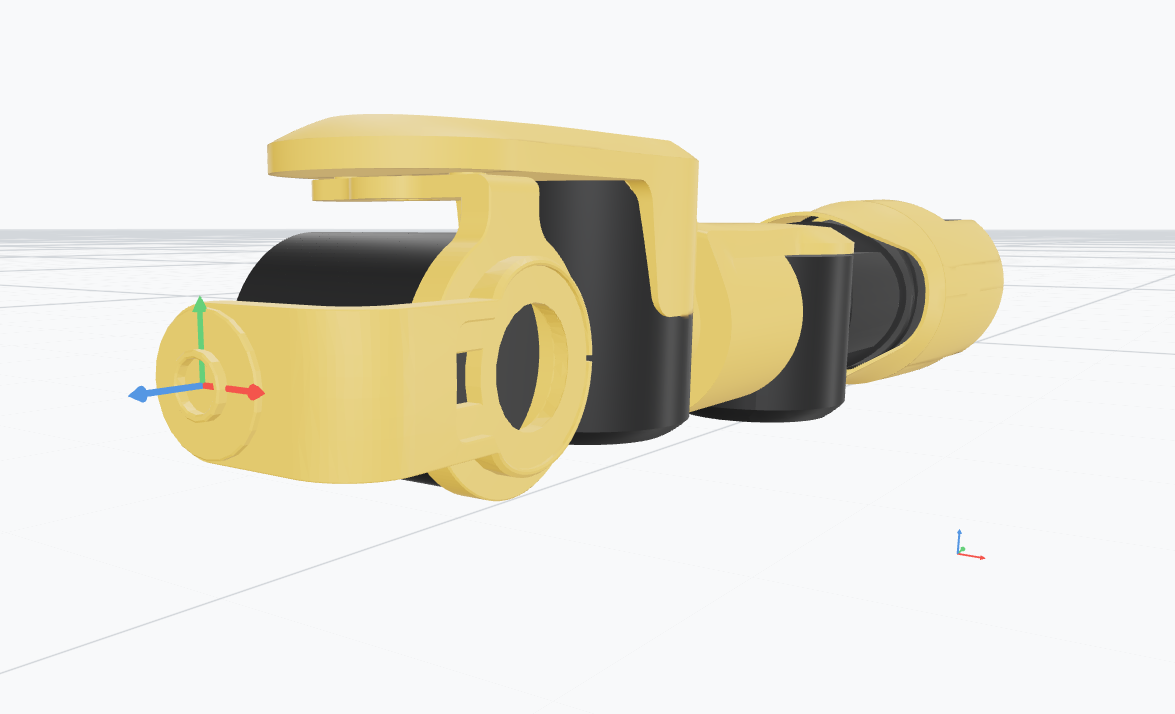 |
8.2.2 全身
| 全身姿态 | 示意图 |
|---|---|
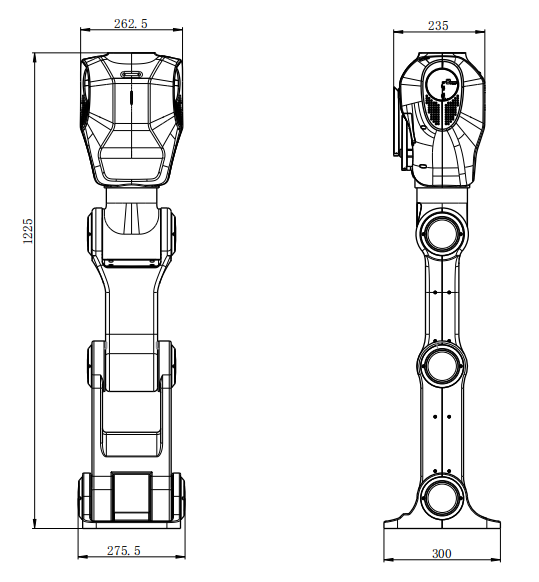
| 站立姿态(正面) | 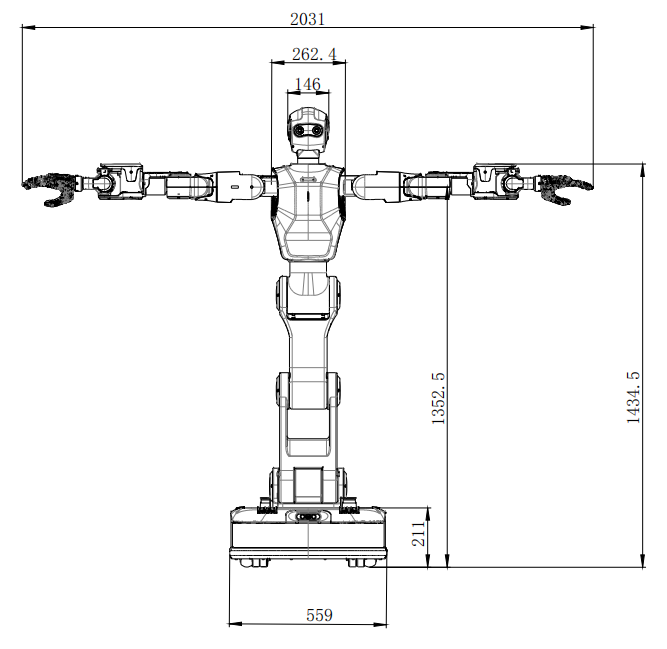 |
| 站立姿态(侧面) | 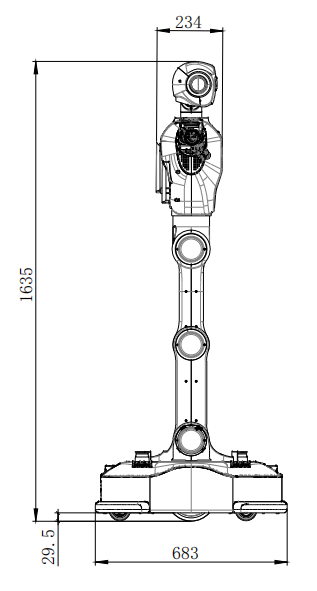 |
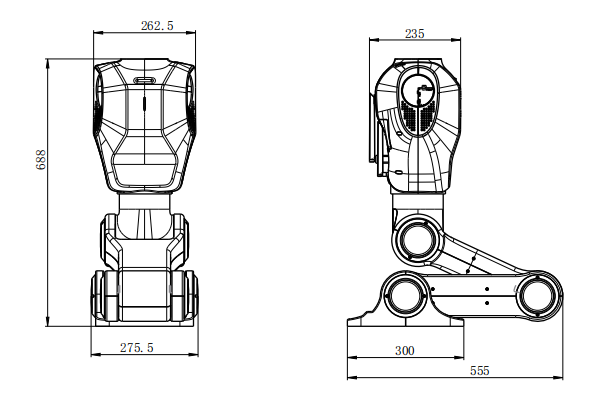
| 打包姿态(正面) | 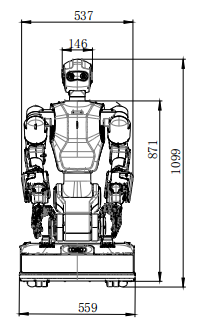 |
| 打包姿态(侧面) | 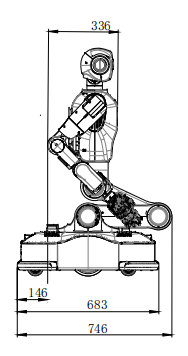 |
8.2.3 颈部
| 颈部关节姿态 | 示意图 |
|---|---|
| 零点位置 |  |
| 抬头极限25度 |  |
| 低头极限45度 |  |
| 左转极限90度 |  |
| 右转极限90度 | 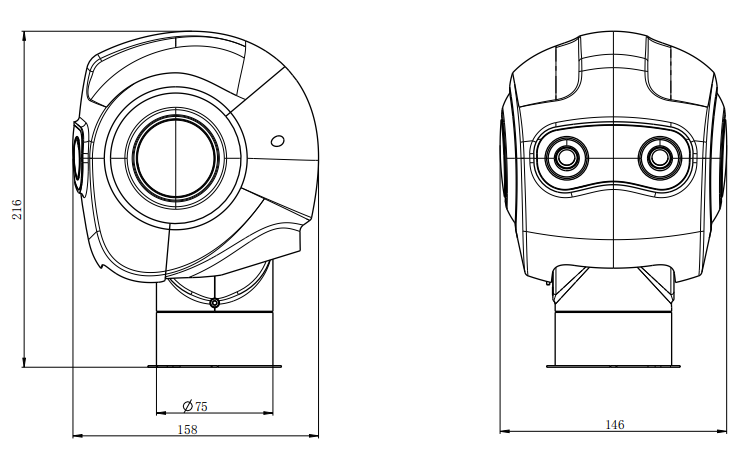 |
8.2.4 躯干
8.2.5 机械臂
8.2.6 灵巧手与二指夹爪
| 强脑灵巧手 | ||
|---|---|---|
| 尺寸参数 | 单手重量 | 547±5g |
| 单手长度 | 183 mm | |
| 单手宽度 | 100 mm | |
| 硬件配置 | 主题材料 | 航空铝合金&食品级塑胶 |
| 传感器配置 | 位置传感器、电流传感器 | |
| 驱动能力 | 6*高性能精密微型电机 | |
| 智能控制 | 精细操作控制,防堵转控制,防摔防摔防抖控制 | |
| 工作参数 | 供应电压 | 9.5~28 V |
| 最大电流 | 3 A | |
| 最大开合距离(食指与拇指) | 113 mm | |
| 单指最大捏力 | 30 N | |
| 五指握力 | 50 N | |
| 手指速度(开合时间) | 0.8 s | |
| 操作精度 | 0.1 mm |
| 二指夹爪 | ||
|---|---|---|
| 性能参数 | 夹持力(单侧) | 40~140 N |
| 总行程 | 50 mm | |
| 最大推荐负载 | 3 kg | |
| 打开/闭合时间 | 0.75 s / 0.75 s | |
| 位置重复精度 | ± 0.03 mm | |
| 运行噪音 | < 50 dB | |
| 重量 | 1 kg | |
| 机械参数 | 传动方式 | 精密行星减速器 + 齿轮齿条 |
| 尺寸 | 138.5 mm × 75 mm × 75 mm | |
| 法兰标准 | 符合 ISO 909-1-50-4-M6 标准法兰 | |
| 垂直方向容许静负荷 | 300 N | |
| 负载允许力矩 | 7 N·m | |
| 电气参数 | 工作电压 | 24 V DC ± 10% |
| 额定电流 | 0.4 A | |
| 峰值电流 | 1.2 A | |
| 额定功率 | 9.6 W | |
| 环境参数 | 推荐使用环境 | 0~40°C,湿度 85% RH 以下 |
| 防护等级 | IP 67 | |
| 功能配置 | 夹持力可调 | 支持调节夹持力 |
| 位置可调 | 支持调节夹爪位置 | |
| 速度可调 | 支持调节夹爪运动速度 | |
| 掉落检测 | 具备掉落检测功能 | |
| 自锁功能 | 具备自锁功能 | |
| 即插即用 | 支持即插即用 | |
| 认证标准 | CE, FCC, RoHS |
8.2.7 控制器
| PC1 & PC2 | |
|---|---|
| 处理器 | Jetson Orin NX 16GB |
| 计算性能 | Super模式 最大算力150TOPS |
| 内存 | 16GB |
| 硬盘 | 1TB |
| 有线网络 | 千兆以太网口 * 2 |
| 无线网络 | Wi-Fi |
8.3 环境要求
确保机器人正常使用,完成作业任务,充电正常且保证正常的使用寿命,需要明确机器人使用环境、气候和地面的要求,包括机器人作业区和充电区要求。
8.3.1 地面环境
良好的地面环境可以使机器人更稳定的运行,并且能够降低机器人雷达、轮子、电机等多种零部件的磨损率,特制定地面技术要求:
8.3.1.1 起伏程度
当机器人 运行的路面起伏程度在最大允许值以下时,机器人 应能实现可控的额定速度行驶, 起伏程度定义为在基准范围内的最高高度与最低高度之差(不同的项目需求需要满足不同的地面要求;当起伏程度大于最大允许值时,按照所选机器人型号及项目情况进行评估)
特殊环境:起伏程度在2.25 ㎡范围内的最大允许值应≤ ±2mm
8.3.1.2 路面坡度
短路面坡度(H/L):定义为在100mm 的长度范围内,路面水平高度差与路线长度的最大比值。路面坡度的最大允许值需≤ 0.05(H=L*sin3°)对于机器人需精确定位对接操作的停车点,必须≤ 0.017(H=L*sin1°)。
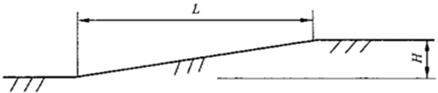
长路面坡度:当机器人 运行的路面坡度在最大允许值以下时, 机器人 应能实现可控的额定速度行驶。路面坡度的最大角度3°,机器人支持以前进、后退运动方向经过坡道,爬坡速度≤0.4m/s。坡道长度最大值为5000mm。
8.3.1.3 台阶高度
台阶高度的定义为在1000mm以内的长度范围内,路面水平高度差的最大值,如图所示。当机器人运行的路面台阶高度在最大允许值以下时,机器人应能实现可控的额定速度行驶,但机器人停车位置不允许出现台阶。路面台阶高度属于机器人运行的特殊场景,机器人具备行驶通过此台阶的能力。但为了确保机器人运行稳定的,不允许长期在此类场景下运行。机器人支持以前进运动方向经过台阶,台阶高度最大值10mm,台阶高度最大允许值为10mm,越障速度≤0.4m/s。
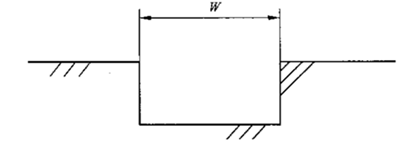
8.3.1.4 过缝宽度
过缝宽度定义为当机器人运行的路面沟宽幅度在最大允许值以下时,机器人应能实现可控的额定速度行驶,但机器人停车位置不允许出现沟槽。路面过缝宽度的最大允许值为30mm,过缝速度≤0.4m/s。
摩擦系数。面摩擦系数的大小对于刹车安全距离及搬运定位精度极为重要,任何地板接头、垃圾、液体、地板清洁剂、化合物都可能损害机器人 的行走能力;摩擦系数需≥ 0.5(不能有积水、油污、砂砾或其他可能降低地面摩擦系数的物质)。静电要求。对于有防静电要求的场景,地面表面电阻或体积电阻值应为2.5×10⁴~1.0×10⁸Ω,且应具有防火、环保、耐磨性能。
8.3.2 导航环境
机器人使用SLAM技术进行场景定位和导航,具备以下特点:高精度、无累积误差、高鲁棒性和强动态环境感知。为确保机器人导航功能正常运行,请满足以下环境要求:
雷达反射率:确保设备与墙壁表面的反射率大于10%。
避免镜面特征:确保雷达视野内没有大面积的镜面特征,以避免干扰导航。
空旷场地:确保场地空旷,使机器人能够利用雷达定位。如果雷达无法看到视野内的物体,机器人将无法进行有效导航,可能导致脱轨或碰撞。
避免矮墙:在雷达工作的高度(距离地面10-30cm),确保环境内没有矮墙的顶面。由于雷达无法做到绝对水平,矮墙的存在可能导致建图或导航失败或精度降低。
避免大幅度变化的障碍物:确保环境内没有大量大幅度变化的障碍物,如潮汐式移动的设备或货架,以免影响导航准确性。
避免长走廊:确保通道长度不超过30米,且两侧无可用于定位的特征物,以避免导航失败或精度降低。
8.3.3 工作环境
为保证机器人正常工作,需满足以下工作环境要求:
场地安全:场地环境变化率需控制在30%以内,地面需定期清洁维护,移除障碍物。
温度和湿度:温度范围需在0~40°C,相对湿度范围为20%~80%。
空气要求:环境内不得有粉尘、易燃、易爆和腐蚀性气体。
静电要求:地面材料需易于排放静电。
海拔要求:海拔范围需在不超过1000m内。
光照要求:环境光亮度需小于2000lux,无太阳光直射。
电磁波:在有强烈电磁波等干扰环境中,需事先确认是否影响机器人正常运行。
其他:远离腐蚀性气体,远离加热器或发热体
8.3.4 通道环境
为了确保机器人在通道内安全、稳定地长期运行,必须满足以下要求:
通道宽度要求:通道宽度应考虑整个通道,去除两侧可能摆放的障碍物后的实际宽度。确保机器人在通道内行驶时有足够的空间,以避免碰撞或阻碍。
通道长度要求:通道长度不应过长,以避免出现长走廊的情况。长走廊可能导致机器人在导航过程中出现定位偏差或导航失败。
避免潮汐式移动设备或货架:通道内不应有大量潮汐式移动的设备或货架。这些设备的移动可能会干扰机器人的正常行驶,影响导航准确性和稳定性。
8.3.5 充电环境
为了确保机器人能够正常充电并保持长期稳定运行,需要满足以下充电环境要求:
机器人运行区域清洁维护:机器人运行区域的地面需要定期清洁和维护,以确保充电时机器人处于清洁的环境中,避免充电时受到外界干扰或损坏。
充电区域维修通道:充电区域周围应留有维修通道,通道宽度不得小于1米,以确保维修人员能够方便地进入并操作充电设备。
充电区域周围无障碍物:在充电区域周围2米范围内不得放置其他障碍物,以确保充电时机器人周围没有阻碍或危险。
避免高反光物体:充电区域尽量避免放置高反光物体,以减少反光对充电设备和机器人的干扰。
充电区域位置选择:充电区域应尽量靠墙,并避免设置在环境变化率较高的区域,如暂存区,以确保稳定的充电环境。
供电电压和频率符合规格要求:供电电压和频率必须在充电桩的技术规格要求范围内,以确保充电设备正常工作。
供电功率余量:供电功率应大于充电桩的最大运行功率,并留有20%以上的余量,以应对突发情况和设备负载波动。
低阻抗接地回路:供电线路必须提供低阻抗的接地回路,以确保充电设备的安全运行。
过压、过载和漏电保护:供电线路必须具备过压、过载和漏电保护功能,以保护充电设备和机器人免受电力波动和安全风险的影响。
8.3.6 网络环境
机器人通过无线网络与上位系统通讯,并以此来获得任务。网络环境对其正常运行和连接至关重要。以下是确保机器人顺畅运行所需的基本网络环境要求:
稳定的网络连接:机器人本体已集成Wi-Fi模块或者WLAN网关,如果使用无线方式接入互联网,请注意合理配置无线路由器,推荐优先使用5GHz的无线信道连接。如果无线网络不稳定或者带宽不足,本体提供了WAN接口,推荐使用有线方式接入互联网。
网络带宽:确保网络带宽足够满足机器人操作需求,提供上下行不低于200Mbps的连接带宽。
低延迟:网络延迟应尽量保持在200ms内,以确保机器人能够及时响应指令和环境变化。
兼容性:支持目前主流的各种Wi-Fi技术协议(802.11a/b/g/n/ac/ax)。
可靠性:网络设备和连接应具有高度可靠性,以防止意外中断或断连,影响机器人的正常运行,因此推荐优先使用有线方式连接互联网。