硬件介绍
2.1 产品组成图

2.2 声光交互
机器人声光交互是指机器人通过状态灯(光信号) 的组合方式,向用户传递自身运行状态、操作提示及安全警报的交互机制。机器人胸部前方的状态灯为光信号输出载体,当机器人切换至对应状态时,将同步触发 “状态灯显示对应颜色 + 闪烁频率”。
颜色类别
红色:代表故障,需要立即干预
黄色:代表提示类状态
蓝色:代表等待类状态
绿色:代表正常状态
机器人状态清单
| 状态 | 状态描述 | 灯光显示 |
|---|---|---|
| 急停 | 1、持续触发急停,未解开 2、防撞条触发达到一定时间 | 红色常亮 |
| 低电量 | 机器人电量处于软件系统设置的低电量阈值 | 黄色快闪 |
| 充电中 | 机器人执行自动充电或者手动充电任务时 | 绿色呼吸 |
| 开机中 | 1、机器人:触发 PC ON/OFF 按钮或者硬开关按钮,进行开机 2、机器人PC执行初始化任务 | 蓝色呼吸 |
| 待机正常状态 | 机器人开机完成,进入待机状态 | 绿色常亮 |
| 待复位 | 系统处于待复位状态,按一次 PC ON/OFF按键,完成复位操作 | 绿色慢闪 |
| 软关机中 | 机器人触发 PC ON/OFF 按钮,播放语音,进行关机中 | 白色快闪 |
2.3 对外物理接口
适用于HW V0.22和HW V0.23版本对外物理接口

| 接口区域 | 名称 | 功能 |
|---|---|---|
| 背部 | 急停按钮 | 当出现紧急情况时,如机器人即将摔倒、碰撞,或电机出现飞车等情况,按下急停按钮可使机器人电机断电,从而迅速停止机器人的运动,避免事故发生。 |
| PC2-WAN | 标准的有线网络接口,用于机器人 PC2 连接外网,使机器人能够与外部网络通信。 | |
| PC2-HDMI | 用于连接外部显示设备,实现视频传输 | |
| PC2-USB2.0-1 | 支持USB 2.0 Host,连接用户的USB device外设(如键盘或鼠标) | |
| PC2-USB2.0-2 | 支持USB 2.0 Host,连接用户的USB device外设(如键盘或鼠标) | |
| PC2-RECOVERY | 仅跨维智能技术支持人员可使用,升级PC2软件镜像 | |
| 胸腔左侧 | PC ON/OFF | 软件控制整机开机或者关机的物理按钮,可控制机器人 PC 端有序下电; 当机器人按下急停按钮而进入急停状态时,抬起急停按钮,按一次 PC ON/OFF按键,即可清除急停状态信号,完成复位操作。 |
| 底盘前 | PC1-USB3.0 | 支持USB 3.0 Host,连接用户的USB device外设(如键盘或鼠标) |
| PC1-RECOVERY | 仅跨维智能技术支持人员可使用,升级PC1软件镜像 | |
| 底盘后 | 硬开关 | 硬件控制整机开机或者关机物理按钮,首次开机时打开硬开关,机器人有序上电开机 注意:包装发货前或长时间存储时,从物理上切断电池与绝大部分电路的连接,保持最少耗电和最高用电安全性。 |
| PC1-WAN | 标准的有线网络接口,用于机器人 PC1 连接外网,使机器人能够与外部网络通信。 | |
| LAN | 标准的有线网络接口,用于个人电脑连接机内网,访问机器人内部网络资源。 | |
| PC1-USB2.0 | 外接遥控手柄,控制机器人的运动,通过 USB 拓展坞,可以扩展外接 PC1 的设备。 | |
| EXTERNAL ESTOP | 外部急停接口,用于接入拉远急停头的信号接点,实现远程急停信号接入,不能在此回路串接普通急停按钮。 |
2.4 关节电机参数
W1 Pro机器人包含头、颈部、腰部、腿部、手臂、机械手,全身具有24个或34个自由度,实现灵活运动与高精度姿态控制。
| 关节 | W1 Pro 机器人(二指夹爪) | W1 Pro 机器人(灵巧手) |
|---|---|---|
| 整机自由度 | 24 | 34 |
| 颈部自由度 | 2(颈部水平1个、颈部俯仰1个) | 2(颈部水平1个、颈部俯仰1个) |
| 单臂自由度 | 7(肩部3个、肘部1个、腕部3个) | 7(肩部3个、肘部1个、腕部3个) |
| 末端执行器自由度 | 1 | 6 |
| 腰部自由度 | 2(腰部水平1个、腰部俯仰1个) | 2(腰部水平1个、腰部俯仰1个) |
| 腿部自由度 | 2(腿部膝关节1个、腿部踝关节1个) | 2(腿部膝关节1个、腿部踝关节1个) |
| 底盘自由度 | 2 | 2 |
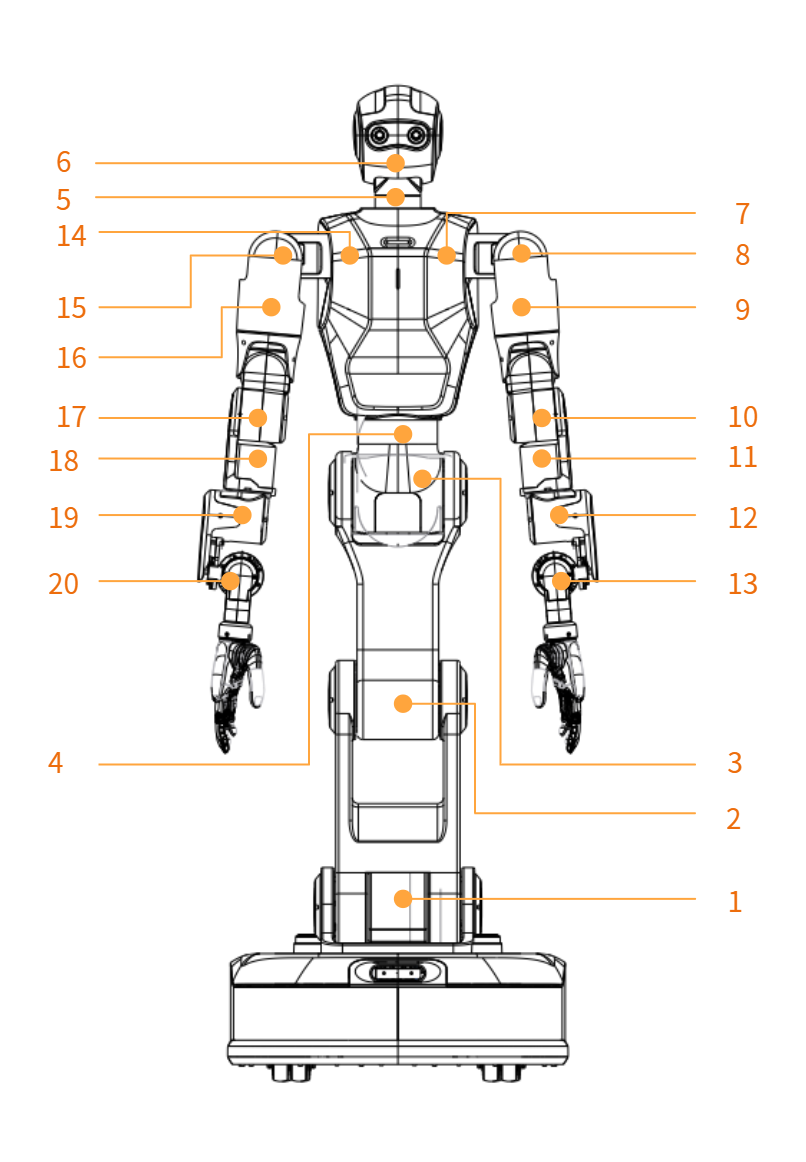
| 关节序号 | 关节名称 | 限位 (度) | 最大旋转速度 | 备注 | |
|---|---|---|---|---|---|
| 最大值 | 最小值 | ||||
| 1 | 腿部踝关节 | -90 | 90 | 180deg/s | 前+ 后- |
| 2 | 腿部膝关节 | -155 | 155 | 180deg/s | 前+ 后- |
| 3 | 腰部俯仰 | -110 | 90 | 180deg/s | 后+ 前- |
| 4 | 腰部水平 | -170 | 170 | 180deg/s | 左+ 右- |
| 5 | 头部水平 | -90 | 90 | 180deg/s | 左+ 右- |
| 6 | 头部俯仰 | -45 | 25 | 180deg/s | 前+ 后- |
| 7 | 左肩J1 | -170 | 170 | 180deg/s | 前+ 后- |
| 8 | 左肩J2 | -120 | 90 | 180deg/s | 上+ 下- |
| 9 | 左肘J3 | -170 | 170 | 180deg/s | 前+ 后- |
| 10 | 左肘J4 | -135 | 90 | 180deg/s | 前- 后+ |
| 11 | 左腕J5 | -170 | 170 | 180deg/s | 前+ 后- |
| 12 | 左腕J6 | -45 | 45 | 180deg/s | 前- 后+ |
| 13 | 左腕J7 | -90 | 60 | 180deg/s | 上+ 下- |
| 14 | 右肩J1 | -170 | 170 | 180deg/s | 前- 后+ |
| 15 | 右肩J2 | -90 | 120 | 180deg/s | 上- 下+ |
| 16 | 右肘J3 | -170 | 170 | 180deg/s | 前- 后+ |
| 17 | 右肘J4 | -90 | 135 | 180deg/s | 前+ 后- |
| 18 | 右腕J5 | -170 | 170 | 180deg/s | 前- 后+ |
| 19 | 右腕J6 | -45 | 45 | 180deg/s | 前+ 后- |
| 20 | 右腕J7 | -60 | 90 | 180deg/s | 上- 下+ |