快速入门
3.1 开箱和装箱
3.1.1 开箱检查
机器人为整体发货,航空箱包装如下图所示。 
航空箱外包装标签如下表:
| 符号 |  |  |  |  |  |
|---|---|---|---|---|---|
| 标识 | 禁止倒置 | 怕雨怕湿 | 易碎物品 | 禁止堆叠 | 请勿滚动 |
请按照如下流程进行开箱检查:
在空旷的场地进行开箱。机器人较重,尽可能多人协助开箱。
开箱步骤图示:

1.脚刹下放,打开侧边三个锁扣。

2.拉开侧门。

3.解开绑带,放下斜坡板。
 4.取出前挡泡棉。
4.取出前挡泡棉。 
5.将机器人从航空箱中取出。
请核对航空箱内包含的物料是否齐全:机器人、产品检验合格证、产品检验报告、干燥剂。开箱后保留所有包装材料。
拆卸航空箱内部泡棉和薄膜后,检查机器人是否存在运输损坏,部件是否存在开裂变形,如有异常请联系跨维智能客服人员。
3.1.2 装箱运输
如需返回机器人进行维修,请按如下流程进行装箱运输。
参照 蹲下 以将机器人打包,以任何其他姿态包装机器人会导致质保失效。
请将原包装材料放入航空箱内。
向物流特殊说明运输应避免强烈震动、不可雨淋、不可倒置并防止水汽入侵。

3.2 开关机
在开机过程中,机器人需要保持静止。
硬开关
将机器人移至空旷位置,确保双臂可完全展开,不会碰到任何障碍物;
确保底盘上没有杂物遮挡雷达和 RGBD 传感器;
找到底盘左后角的红色船型开关;
将船型开关拨向“|”位置,为整机接通电源。
可以通过指示灯判断状态:从无灯→蓝色灯→绿色常亮(表示开机完成)。

- PC ON/OFF
若需要关机,按下 PC ON/OFF,系统将在 1min 内完成软关机。
机器人软关机状态下(此时硬开关打开),按机器人胸腔侧边的PC ON/OFF 3s 以上,可以通过指示灯判断状态:从无灯→蓝色灯→绿色常亮(表示开机完成)。

3.3 站立蹲下
3.3.1 站立
对机器人进行网络配置后,需执行站立操作,使机器人从折叠姿态站立起来。手柄使用方法请参考 移动控制手柄。
参照 移动控制手柄 将手柄与PC1连接配对、将模式按键拨至 D 模式、对手柄进行初始化;
右手按Y键,控制机器人站立;
站立姿态操作完成后才可切换其他姿态。
站立姿态操作过程中,不能进行底盘移动,站立姿态操作完成后,才可以进行底盘移动。
- 机器人站立姿态操作完成后,机器人状态如下图,说明开箱姿态初始化已完成,对应真机状态也呈现为standby姿态。

3.3.2 蹲下
手柄使用方法请参考 移动控制手柄。
确保灵巧手姿态为竖直状态,如果不是请右手按Y键,将机器人恢复到站立姿态;
右手按移动控制手柄的 A 键,使机器人蹲下;
站立或蹲下姿态操作完成后才可切换其他姿态。
站立和蹲下姿态操作过程中,不能进行底盘移动,站立和蹲下姿态操作完成后,才可以进行底盘移动。
- 蹲下姿态操作完成后,机器人状态如下图。

3.4 网络配置
机器人开机上电后,需进行网络配置,以便进行后续的远程控制、数据传输和二次开发。
HW V0.23版本的网络配置方式有2种:一是登录机器人内部PC2,让机器人内部 PC2 通过有线或无线方式,直接接入外部局域网;二是机器人内置的Industrial WiFi AP 设备发射热点,外部设备通过连接热点访问机器人内部PC1/PC2。
HW V0.24版本的网络配置方式有2种:一是登录机器人内部PC2,让机器人内部 PC2 通过有线方式,直接接入外部局域网;二是节点通作为Wi-Fi AP,外部设备通过连接节点通提供的Wi-Fi热点,访问机器人内部PC2;三是利用节点通的端口转发功能,让机器人内部无 Wi-Fi 模块的 PC1/PC2能够通过节点通连接机外网络,使外部设备能访问PC1/PC2。
PC1和PC2是机器人内部的两台主控电脑,在PC1和PC2上禁止使用
sudo apt upgrade或sudo apt-get upgrade命令,否则会导致系统损坏。
3.4.1 PC2直接访问机外局域网
3.4.1.1 登录机内PC2
登录机内PC2有两种方式:一是通过外接显示屏和键鼠实现对机内PC2的访问和控制,二是通过个人电脑上的Nomachine远程软件实现对机内PC2的访问和控制。
3.4.1.1.1 外接显示屏键鼠
将显示屏外接到机器人背部的PC2-HDMI接口,键鼠分别连接到机器人背部的PC2-USB2.0-1和PC2-USB2.0-2接口,显示屏显示 PC2 桌面,然后可以通过 Wi-Fi方式 或 有线方式 连接机外局域网。

3.4.1.1.2 Nomachine 远程PC2
3.4.1.1.2.1 连接机内交换机
① 使用网线连接您的个人电脑与机器人底盘上的 LAN 网口;
② 将您的个人电脑上的IP地址设置为 192.168.20.240 - 192.168.20.255 之间的任意一个地址(例如 192.168.20.240),使个人电脑与机内网络处于同一网段,能够互相识别和通信;

③ 在个人电脑上搜索 Terminal 打开终端,执行以下命令,测试个人电脑与机内网络的连通性;
④ 如果可以 ping 通,接下来可通过 SSH 或 NoMachine 远程桌面两种方式登录 PC2,建立对PC2的控制通道。
3.4.1.1.2.2 Nomachine 登录PC2
- 如果您习惯使用命令行,那么可以通过 SSH 方式登录 PC2,在个人电脑的 Terminal 终端上执行以下命令即可;
SSH是一种安全的远程登录协议。这一步相当于在您的个人电脑上打开了一个控制机器人PC2的命令行窗口。
如果您不习惯使用命令行,那么可以使用 NoMachine 远程桌面软件登录PC2。
NoMachine软件可以让您的个人电脑屏幕上直接显示并操作 PC2 的整个 Ubuntu 系统桌面环境,就像在直接使用机器人内部的电脑一样
- 在您的个人电脑上下载安装 NoMachine 软件,下载地址:https://www.nomachine.com/;
- 下载安装后,打开 NoMachine 软件,点击
+ Add按钮;

进入
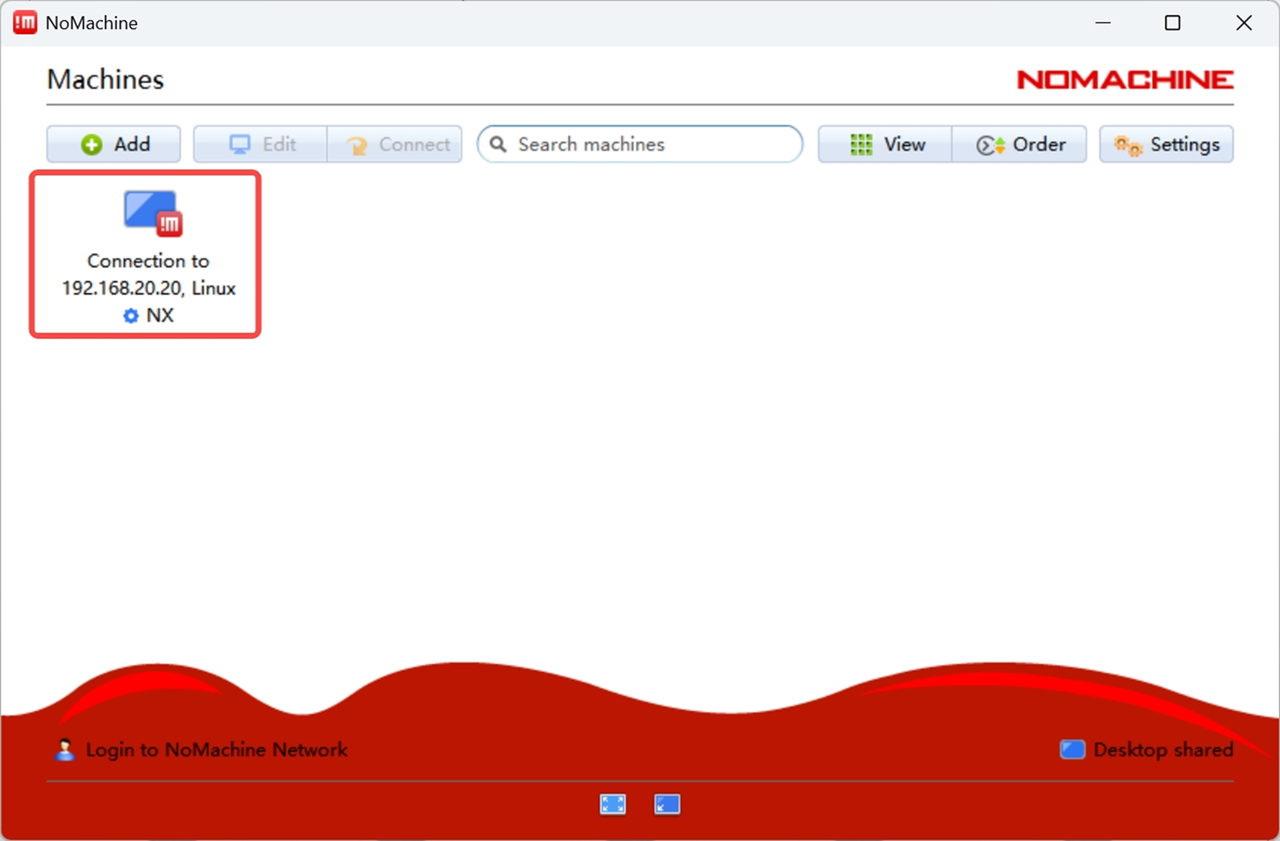
Add connection界面,点击Address,Name填入 dexforce,Host填入机器人内部主控电脑PC2的IP地址,然后点击右上角的+Add,连接成功后出现下图(右)的界面,点击对应的主控电脑进行远程操作。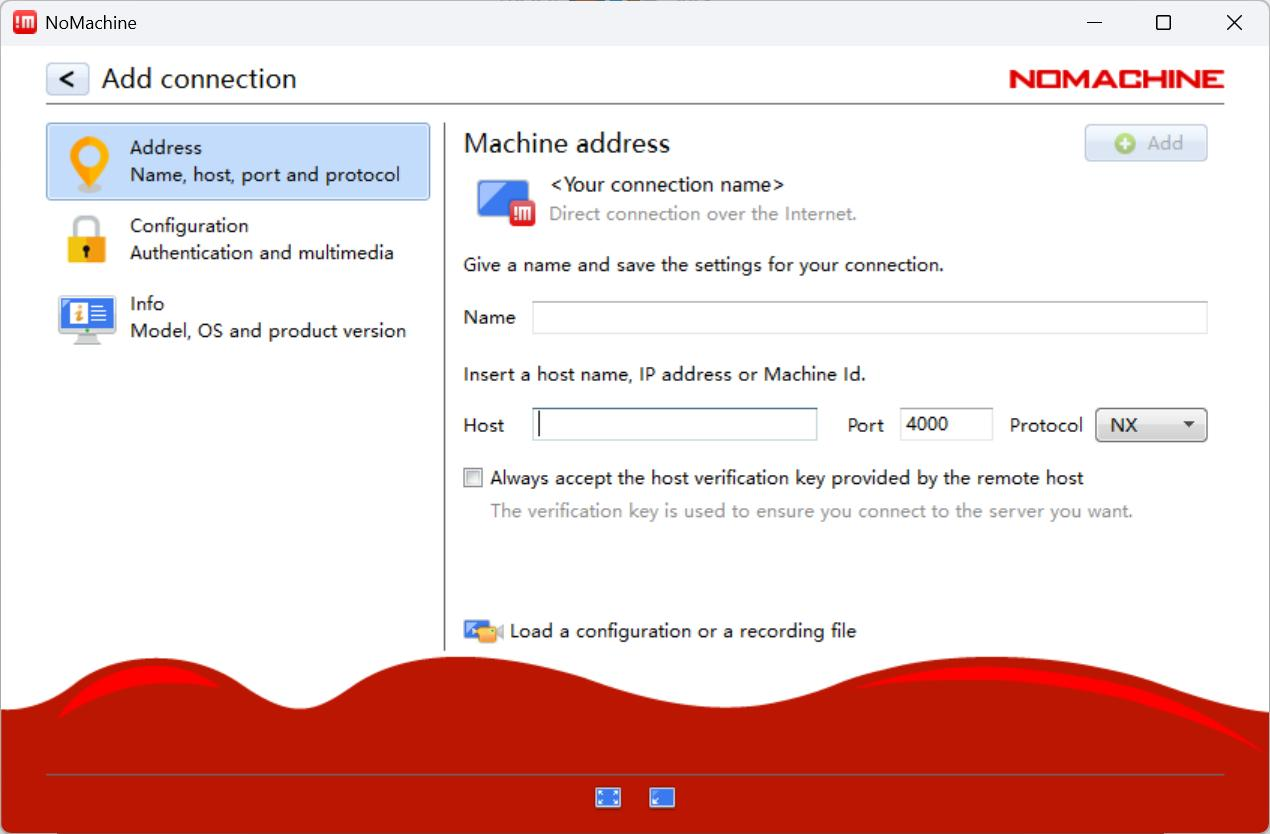
如果后续机器人将以有线方式连接机外局域网,则“Host”里填入192.168.20.21(该地址是PC2的固定IP地址)。
如果后续机器人将以Wi-Fi方式连接机外局域网,则“Host”里应填入PC2当前的外网IP(该地址是您的局域网分配给PC2的地址,随接入局域网的变化而变化)。
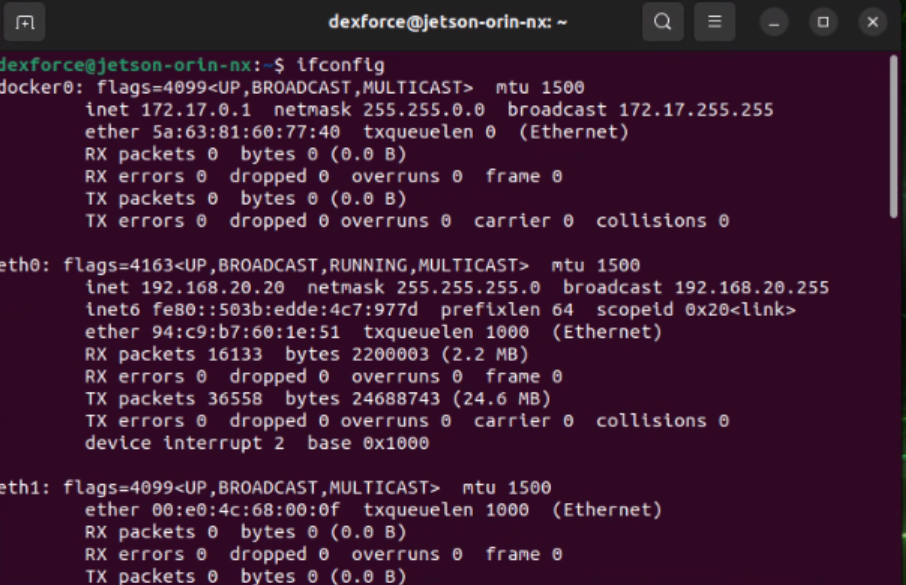
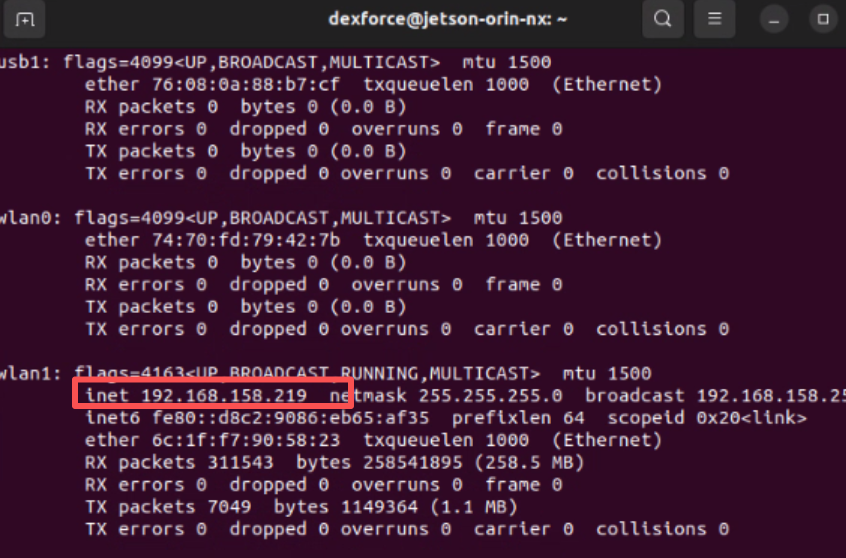
如果您不知道,您需要先参照 连接机内交换机 连接交换机,然后在您的个人电脑上搜索Terminal打开终端,通过 SSH 方式登录 PC2,然后输入
ifconfig命令,查看PC2当前的外网IP是多少,如下图所示。这个找到的IP就是您下次可以直接连接的地址。
- 连接后,您个人电脑的屏幕上就会显示出 PC2 的 Ubuntu 系统桌面,如下图所示。
3.4.1.2 PC2访问机外网络
3.4.1.2.1 Wi-Fi 方式连接机外网络
HW V0.23版本可以用Wi-Fi 方式连接机外网络,HW V0.24版本不支持直接用Wi-Fi 方式连接机外网络
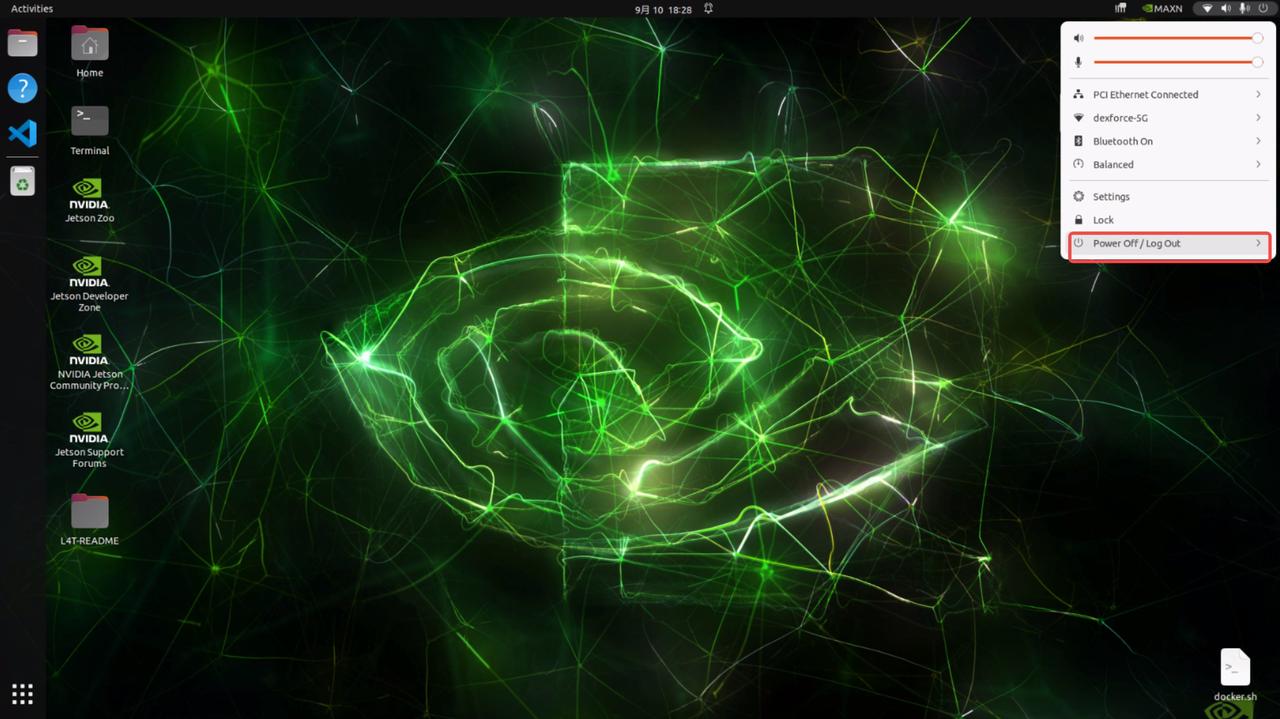
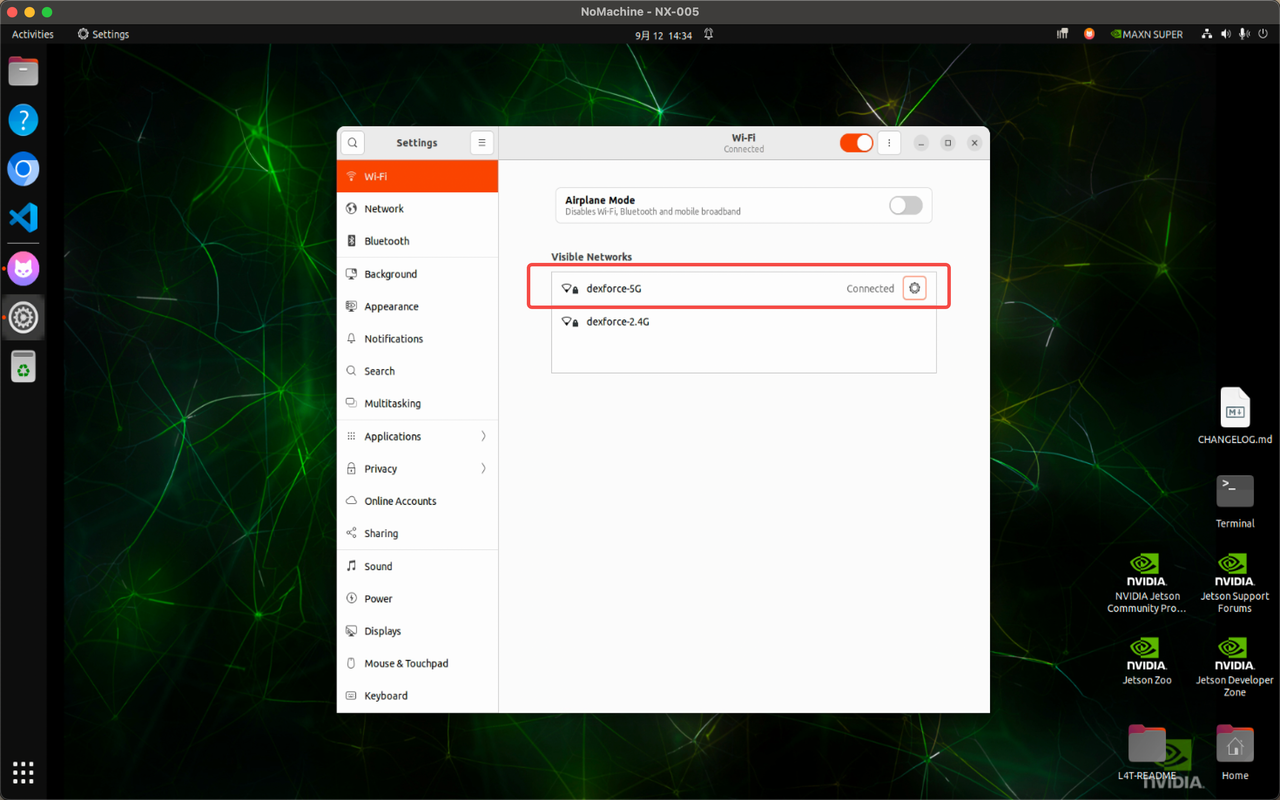
① 在PC2的桌面上,找到屏幕右上角的网络图标,用鼠标左键单击这个图标,如下图所示。
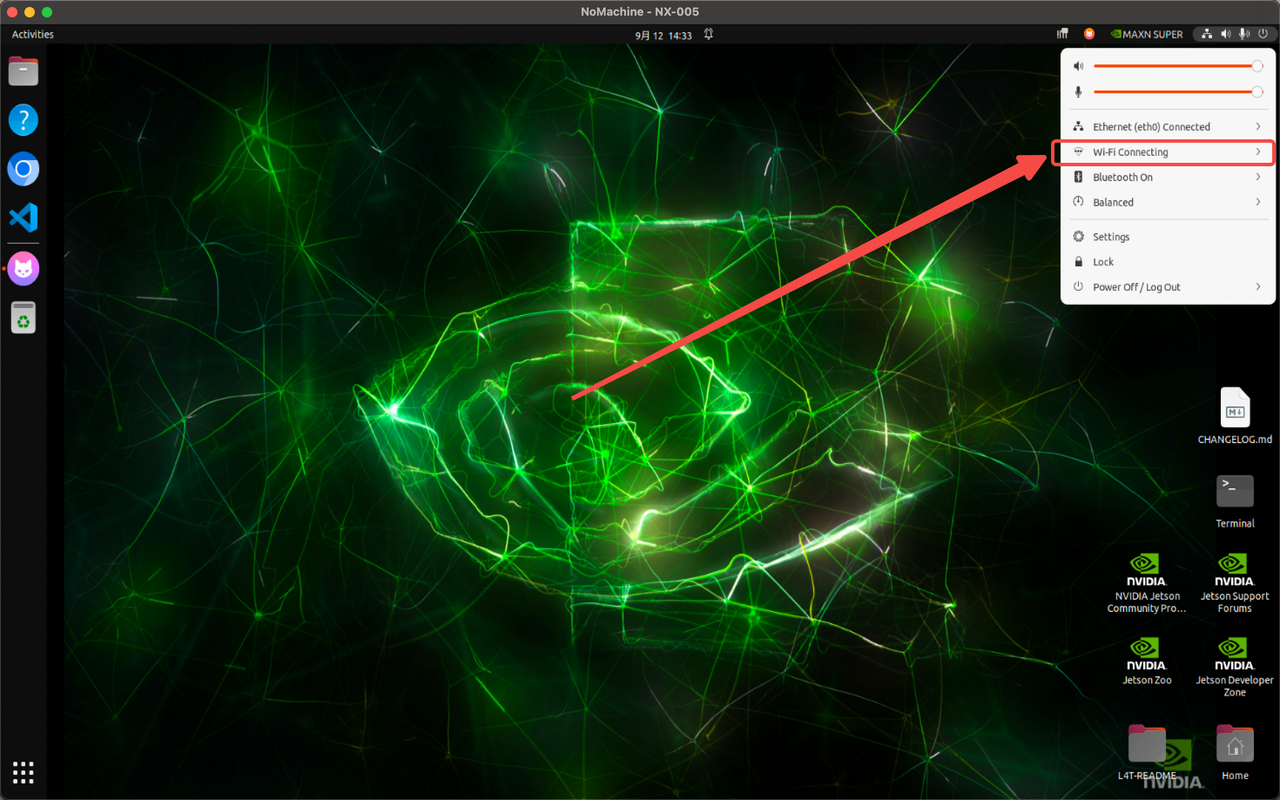
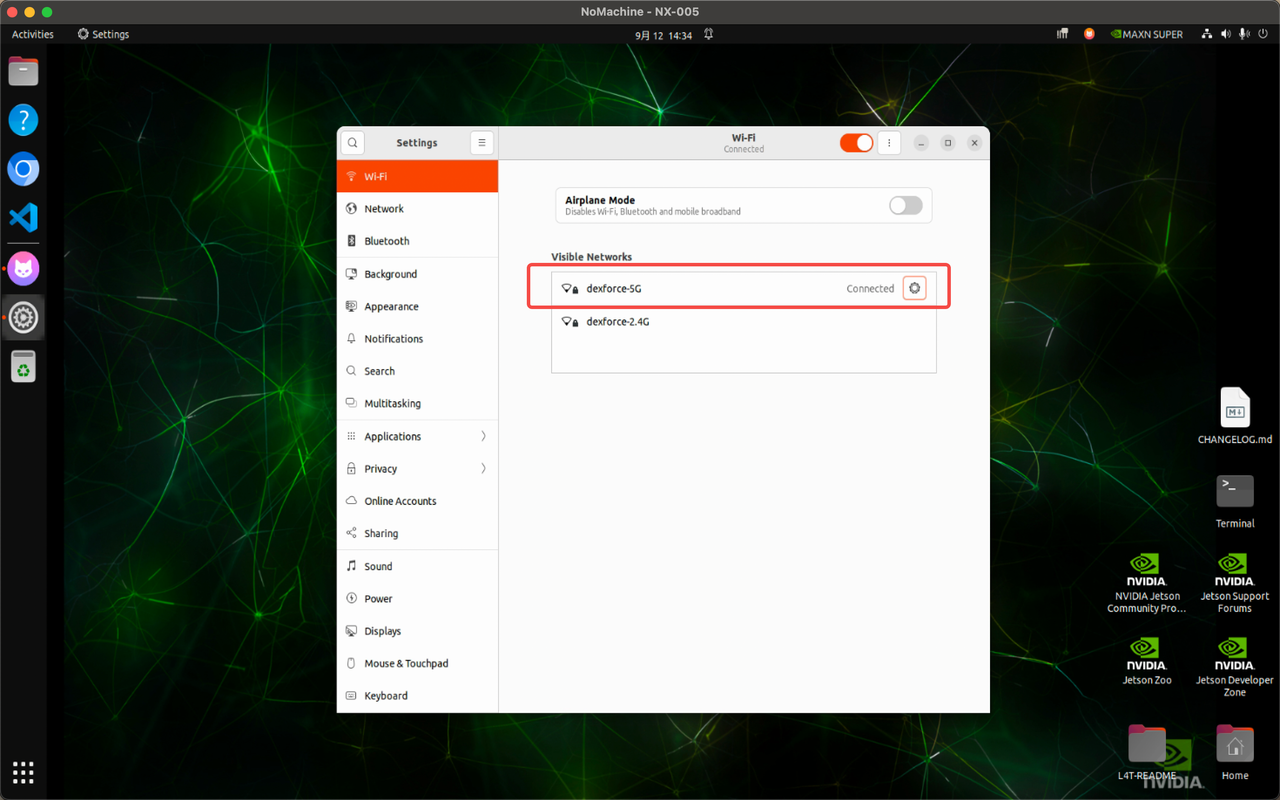
② 在弹出的Wi-Fi列表中选择您想要连接的 Wi-Fi 网络,输入密码即可连接。
3.4.1.2.2 有线方式连接机外网络
禁止在底盘的 PC1和PC2 相关接口上插入带网口的 HUB,否则会导致主控电脑无法正常启动。
① 在机器人背部的接口中找到PC2-WAN网口;
② 将一根来自路由器或墙上面板的、能上网的网线插入此网口。该网口的网络设置默认为 automatic (DHCP自动获取IP),所以插上网线后,PC2会自动识别并连接上网(DHCP模式),无需任何其他操作。

3.4.2 外部设备连接热点
HW V0.23版本的机器人内置了 Industrial WiFi AP 设备,个人电脑或VR设备需连接WiFi:Smart_wifi_5G_0xx(xx是机器人的编码,在底盘后),密码dexforce123,使个人电脑或VR设备与机器人处于同一网络。
HW V0.24版本的机器人背部安装有节点通设备,使用网线连接机器人底盘上的LAN口和节点通的ETH3接口,确保PC2 与节点通处于同一局域网。

个人电脑或VR设备只需要连接节点通提供的热点Smart_wifi_5G_0xx(xx是机器人的编码,在底盘后),密码dexforce123,使个人电脑或VR设备与机器人处于同一网络。
节点通接入PC1需要通过交换机
3.4.3 节点通方式连接机外局域网
HW V0.24版本的机器人背部有节点通设备,机器人内部的PC1/PC2可使用有线方式连接节点通,再通过节点通连接外部局域网。
- 有线接入PC2
机器人背部安装有节点通设备,使用网线连接机器人底盘上的LAN口和节点通的ET3接口,确保PC2 与节点通处于同一局域网。

- 进入节点通后台
您的个人电脑直接连接 Smart_wifi_5G_0xx(xx是机器人的编码,在底盘后),密码: dexforce123。
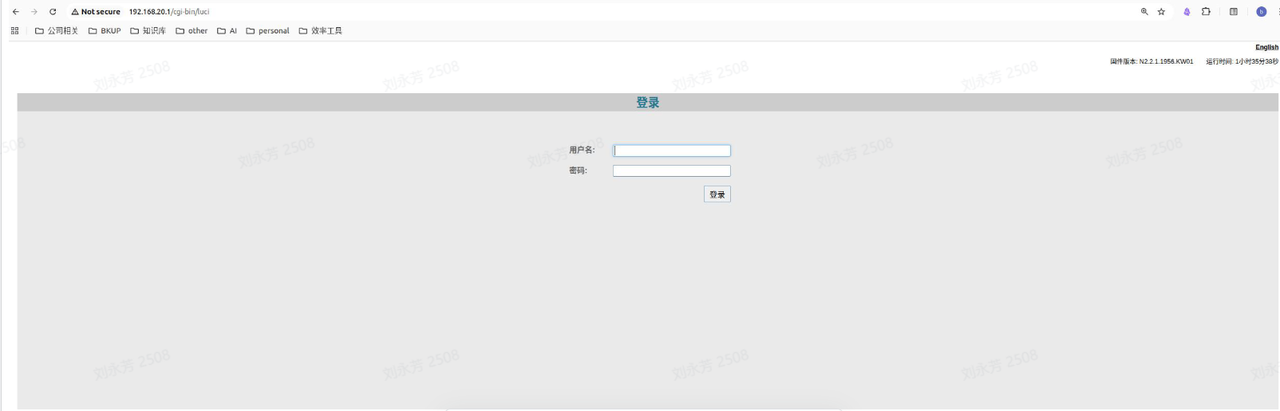
然后浏览器访问 http://192.168.20.1/cgi-bin/luci,输入用户名:admin,密码:admin。
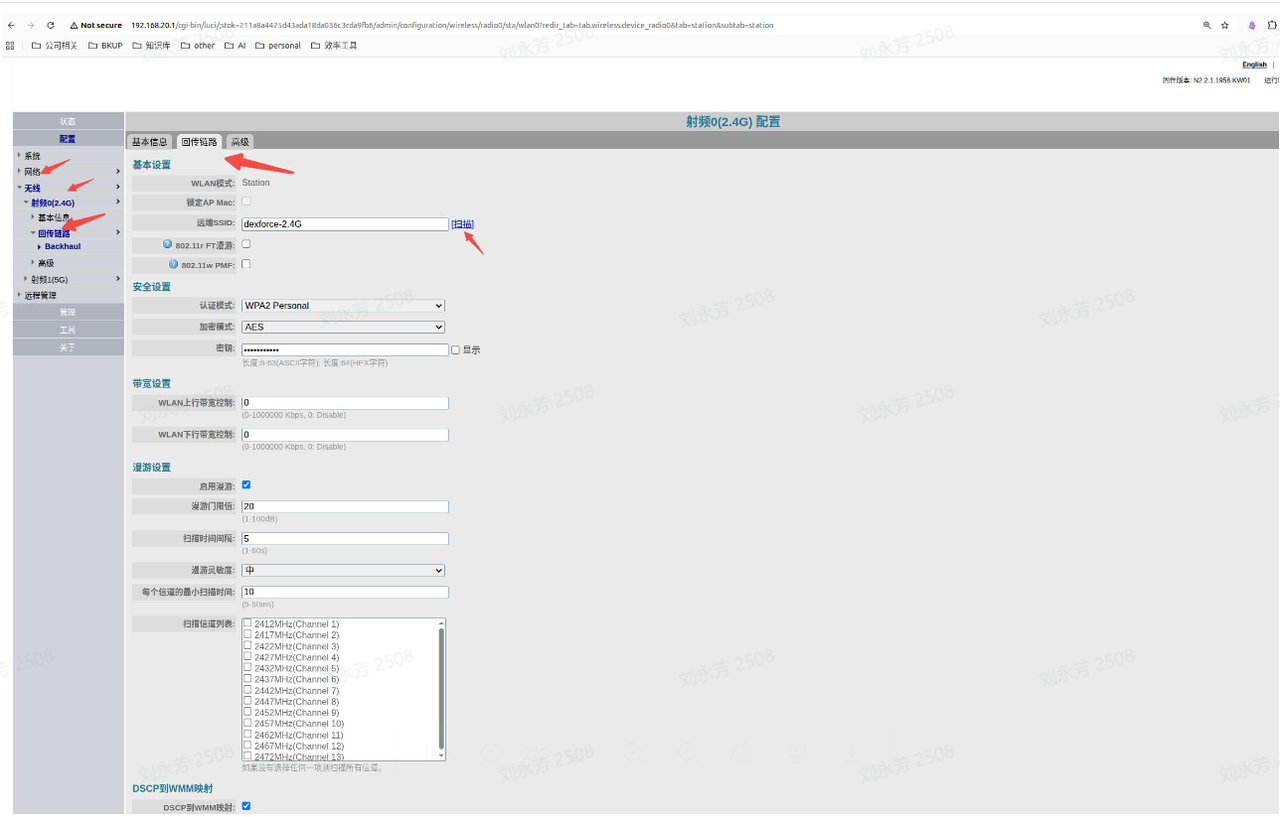
- 配置节点通连接到公司Wi-Fi
在节点通后台,按下图找到“回传链路”,点击“扫描”
从列表中选择要连接的无线网络
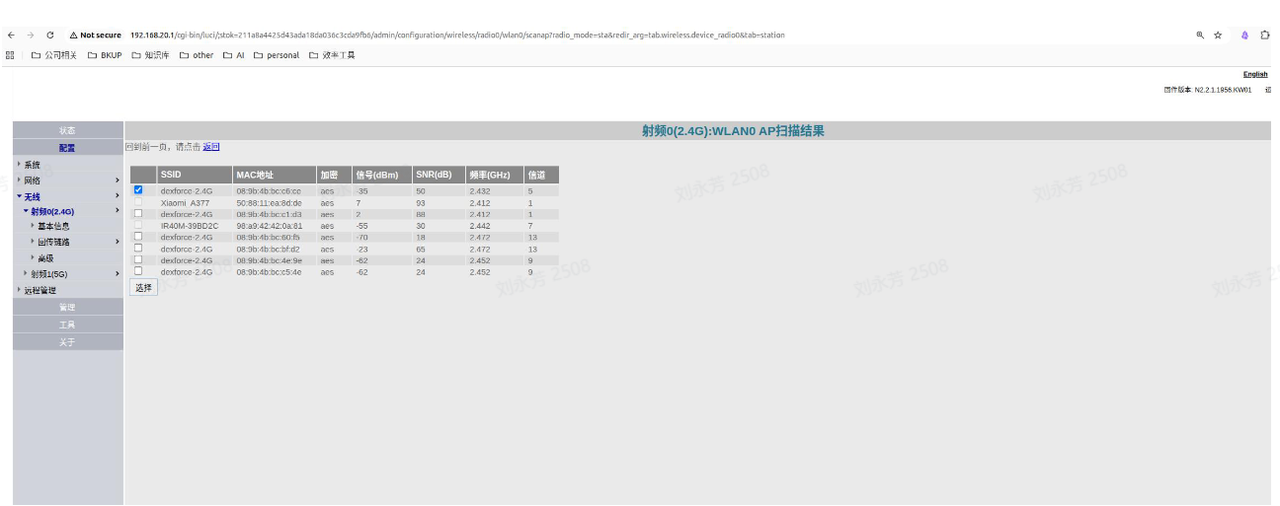
输入密码
下图的认证模式一般如图所示,如果不一样请联系当地的IT获取
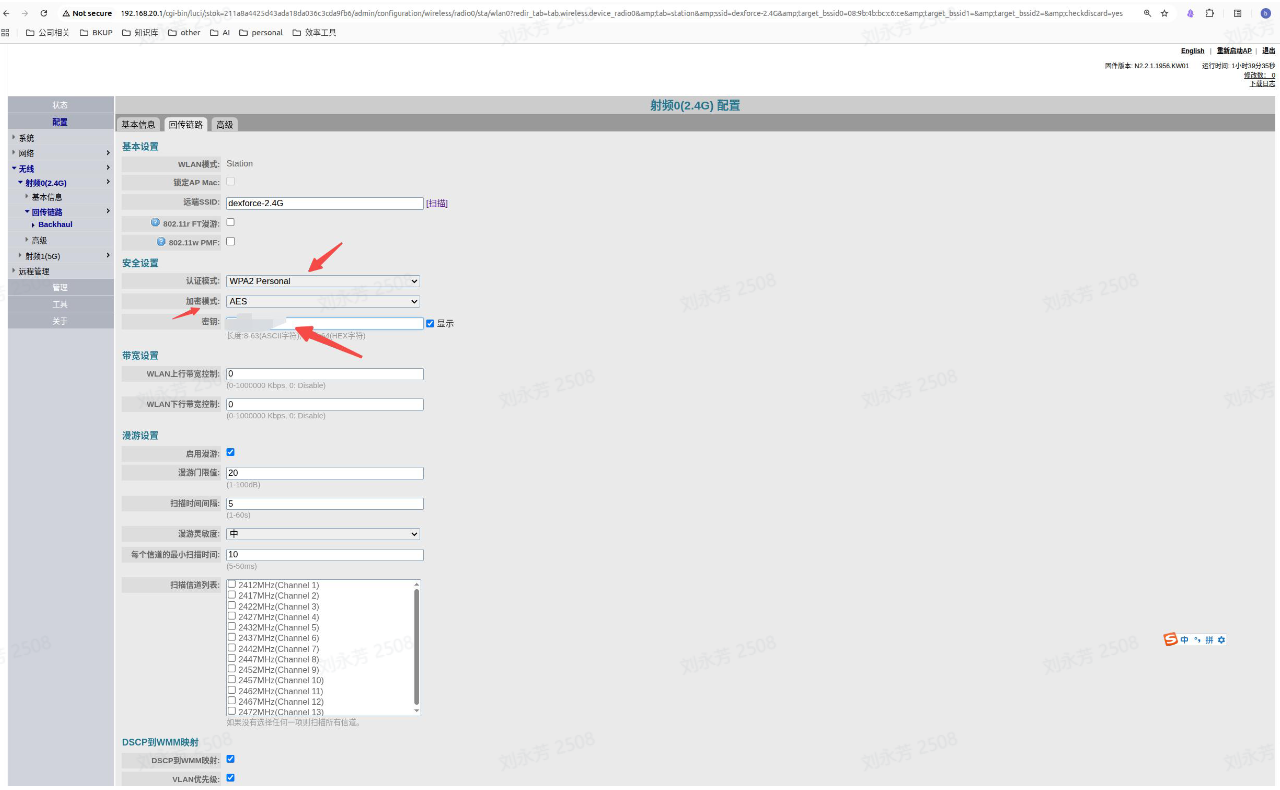
点击“提交”
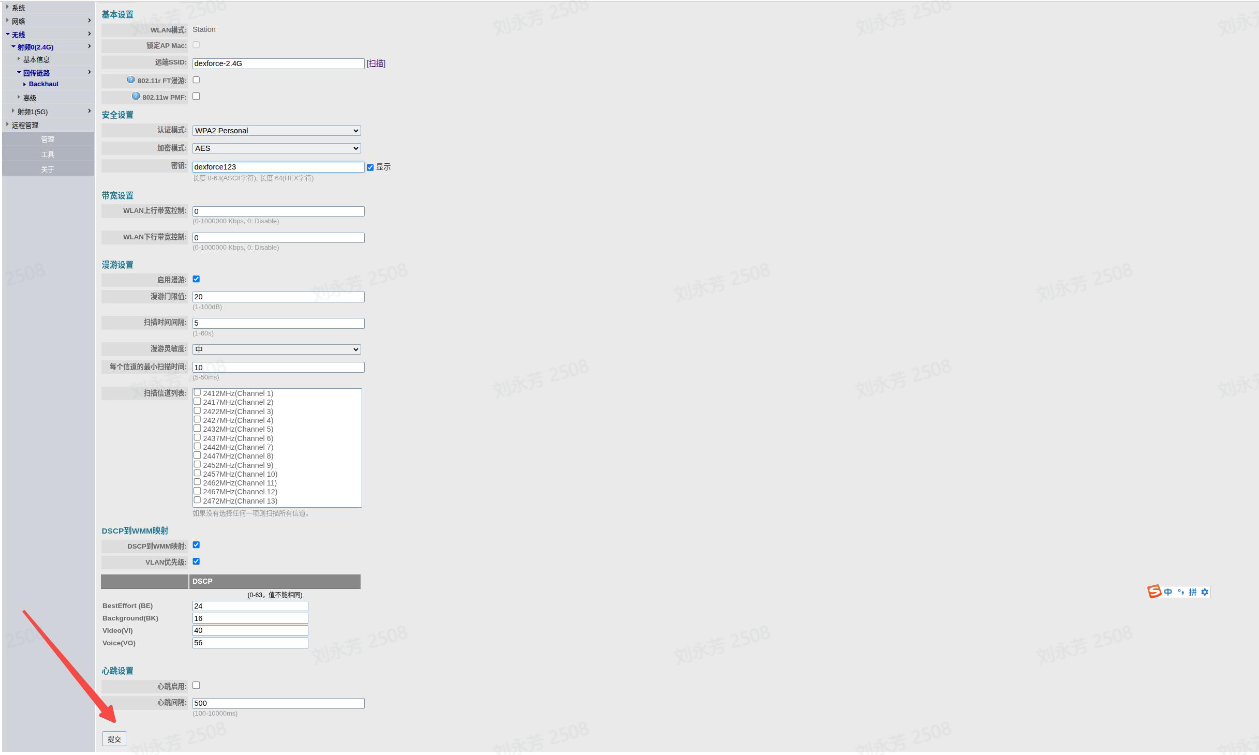
点击保存&应用
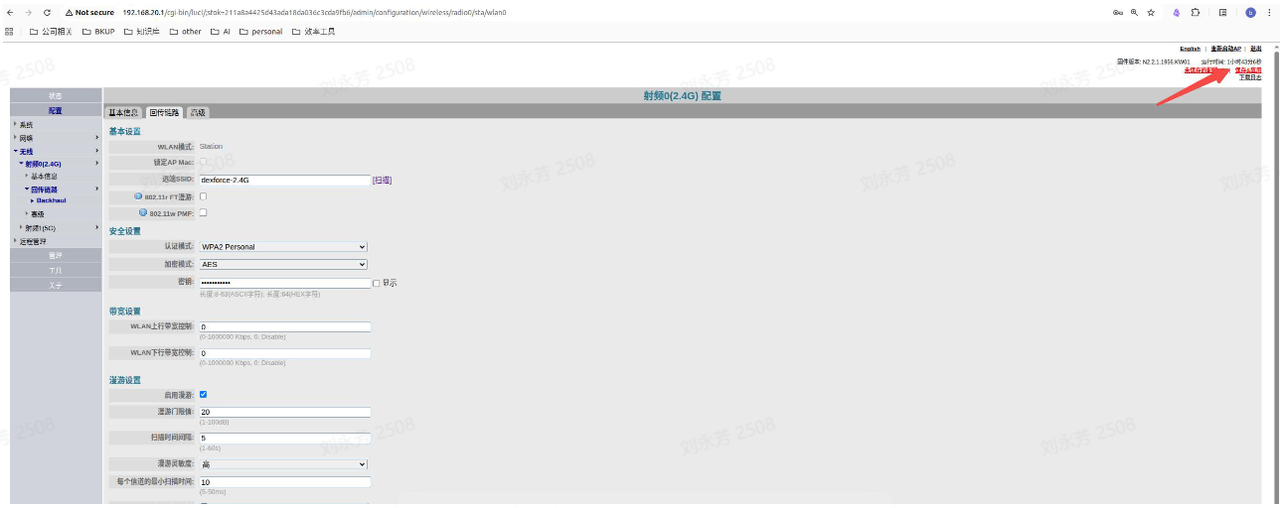
等待应用成功


- 如果机器人的默认网关没有配置,还需要配置下机器人内部PC2的网关,PC2才能访问外网。因此可以通过 登录机内PC2 进入PC2,手动配置网关,指向节点通(通常为
192.168.20.1)。
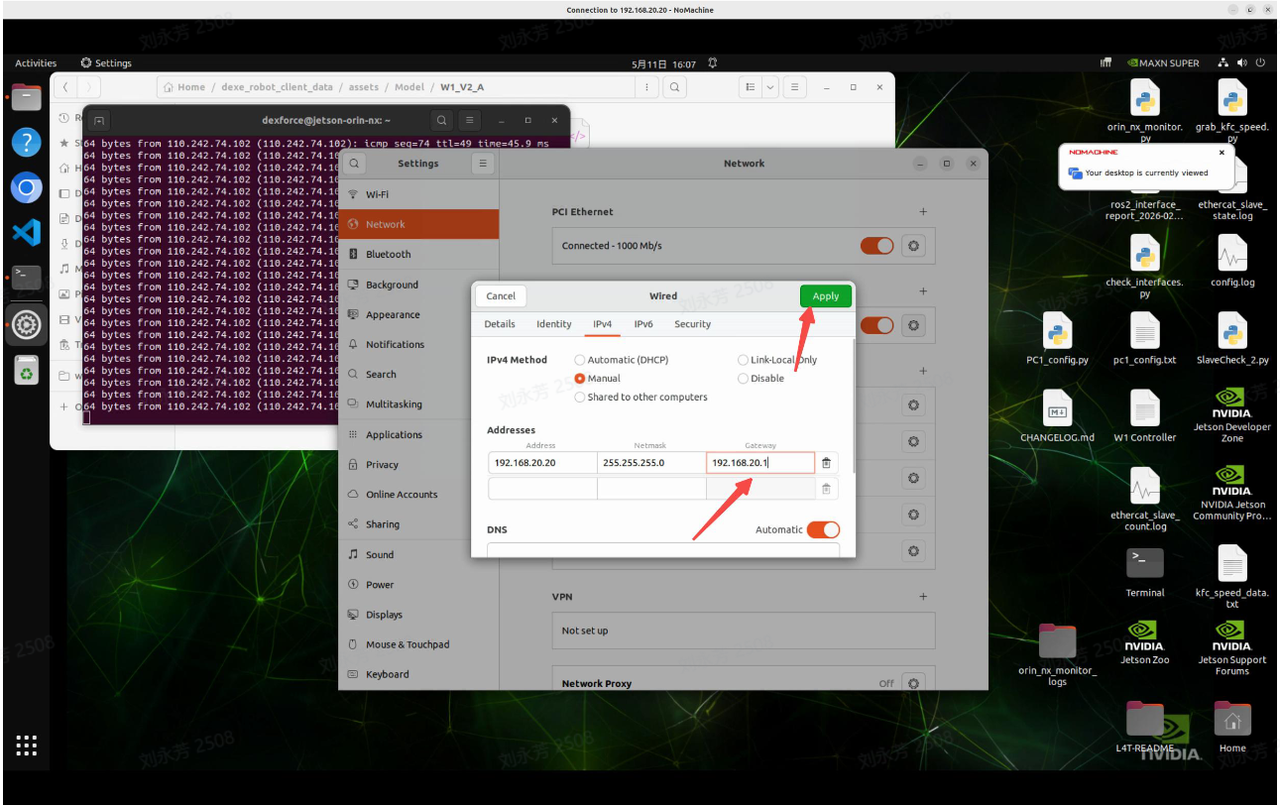
配置网关后,重启机器人,重启后PC2就可以通过节点通访问外网。
3.5 手动充电
机身灯带黄色慢闪时电量小于30%,需进行充电;
按照图示,在底盘尾处插入充电器插头;
充电状态如图示,适配器显示区,电压显示54V为满,电压显示40V以下为电量不足,需及时充电;
充电至电压显示54V前应断开充电器,避免电机出现运动异常。

3.6 急停
- 当出现紧急情况时,如即将摔倒或碰撞,电机出现飞车等,需要进行急停,急停是机器人背部的红色按钮。
急停按钮有 按下 和 抬起 两个状态。按一下进入 按下 状态,此时急停生效,再右旋一下回到 抬起 状态,恢复上电状态,可重新进行操作。

- 当机器人按下急停按钮而进入急停状态时,抬起急停按钮,按一次 PC ON/OFF按键,即可清除急停状态信号,完成复位操作,系统恢复至正常待机状态。
如果机器人胸腔前的状态灯显示绿色常亮,表示 急停状态成功清除,已成功复位。如果状态灯显示绿色慢闪,表示系统处于待复位状态。

3.7 动作表演
跨维为机器人预设了多个固定动作,如“比心”“敬礼”等,通过简单的命令运行预设动作程序,即可让机器人执行预设的动作和姿态。
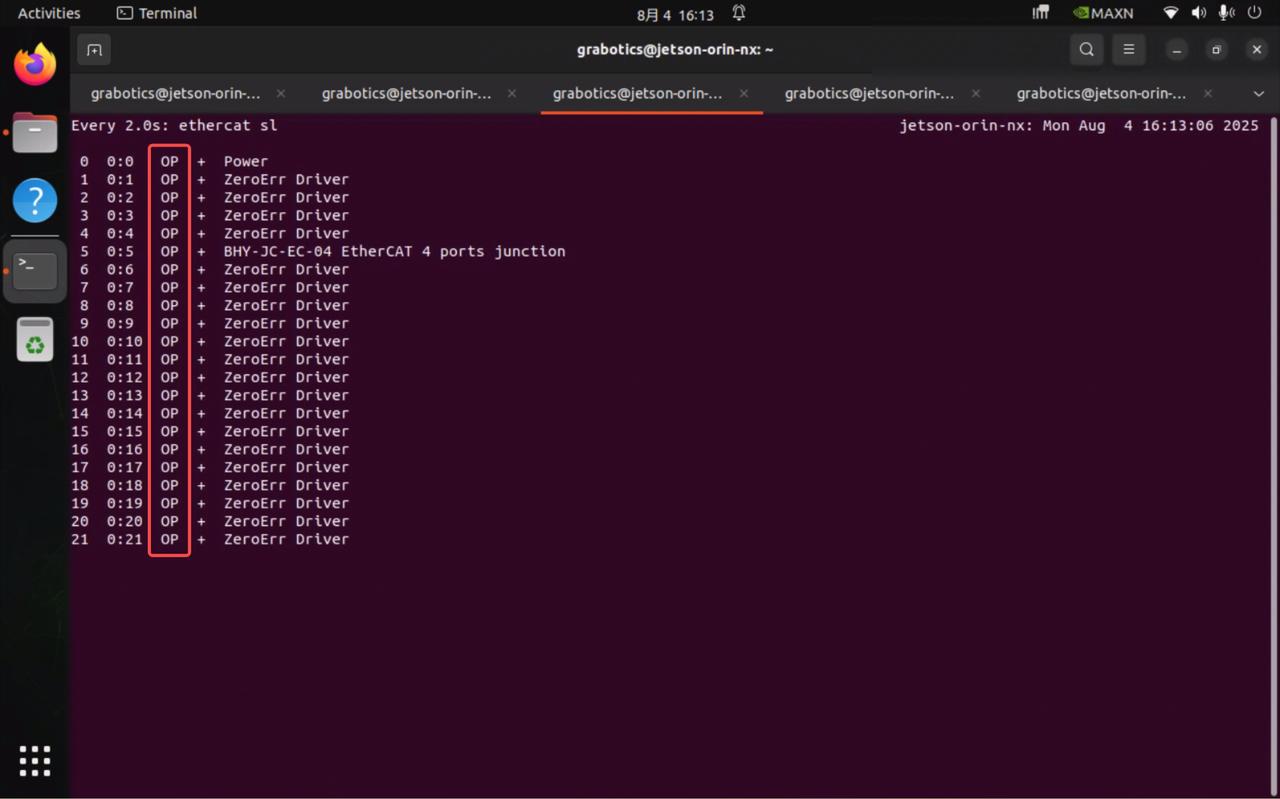
① 在PC1的远程桌面上,敲入以下命令行,启动成功后,应该如下图所示。如果一致并听到一声响,说明dexe_mobile_application启动成功。ethercat sl应该全部显示“op”。
② 再敲入以下命令行运行预设脚本

③ 启动成功后界面大致如下:共包含七个预设动作,右下角为所有动作的混合效果。

④ 运行时,点击对应图片即可执行该动作且循环播放,下方的指示灯会变为绿色表示正在运行。
⑤ 如需切换预设动作,应当在当前动作完成一个循环动作后,再点击当前动作的图片或底部的“stop”按钮停止当前动作,待指示灯变为灰色后再点击新的动作。
⑥ 如需退出预设程序,在您的个人电脑上手动点击“ESC”按键即可。
3.8 表演打招呼和握手
在 W1控制界面 点击 【恢复 ACT】按钮,即可让机器人实现自主打招呼和握手。如需停止打招呼握手,可点击【ACT:OFF】按钮。关于W1控制界面的介绍请参考 W1 控制界面。

3.9 移动控制手柄

3.9.1 按键功能
| 按键 | 功能 |
|---|---|
| Logo 键 | 用于与接收器建立连接,按下后触发配对流程
|
| Mode 键(绿色框) | 1. 切换摇杆模式(常亮→无级模式); 2. 旁边指示灯用于确认连接状态(亮灯 / 非亮灯对应不同模式) |
| 模式按键(上图中的红色框) | 需拨至 D 模式,否则手柄无法正常使用 |
| LT/RB | 无单独功能,需配合其他按键使用 |
| LB | 速度切换键:按住时将机器人最大速度提升至 0.6m/s(线速度)、1.0rad/s(角速度) |
| RB | 使能键:按住后才能触发机器人的运动控制指令 |
| Y 键 | 触发机器人 “站立控制”:执行标准原点动作,用于机器人从包装箱取出后站立 |
| A 键 | 触发机器人 “蹲下控制”:执行蹲下动作,用于打包装箱(需先确保灵巧手竖直) |
| X 键 | 触发 “播放动作 1”:执行 BULLS 动作(循环 3 次,恢复到 standby 姿态后可操作) |
| B 键 | 触发 “播放动作 2”:执行 GUNS 动作(循环 2 次,恢复到 standby 姿态后可操作) |
| 线速度摇杆 | 控制机器人线速度(前推 = 前进、后推 = 后退;差速机器人偏移则停止) |
| 角速度摇杆 | 控制机器人角速度(右推 = 顺时针自旋、左推 = 逆时针自旋;偏移左 / 右则停止) |
| 线速度按钮 | 单轴控制机器人运动:前 = 前进、后 = 后退、左 = 左旋、右 = 右旋 |
3.9.2 手柄的基础操作
基础操作是指手柄与机器人连接配对、模式切换、手柄初始化三类核心操作,是后续所有控制指令生效的前提。
| 操作类型 | 机器人类型 | 操作步骤 |
|---|---|---|
| 连接配对 | 差速 | 将罗技手柄接收器插入机器人底盘后的PC1-USB2.0接口。 按下Logo键,按下Mode键,当Mode 键旁边的指示灯为常亮,表示已经连接。 |
| 模式切换 | 按下 Mode 键切换为 “摇杆无级模式”(此时指示灯需保持非亮灯状态),避免摇杆输出异常导致机器人无法运动; 同时将模式按键(上图中的红色框)拨至 D 模式,确保手柄处于可工作状态。 | |
| 手柄初始化 | 同时按住左、右摇杆,向斜上方中间方向推动(如蓝色箭头所示)完成手柄的初始化,保证后续控制指令的精度。 |
注意:
手柄使用时,Mode旁边的指示灯在确认连接后要保持非亮灯模式,否则会导致左摇杆只有最小值和最大值,机器人不运动。
3.9.3 底盘移动操作
底盘移动操作是指通过手柄按键、摇杆向机器人发送线速度、角速度指令,实现机器人移动、自旋、曲线运动等位移动作的操作,需遵循 “先使能、后控制” 的规则(按住 RB 键保持使能)。
注意:
所有运动控制需先按住 RB 键保持使能,默认模式下,机器人最大线速度0.4m/s, 角速度0.75rad/s;
若需高速运动需额外按住 LB 键不放,机器人最大线速度调整至0.6m/s,最大角速度调整至1.0rad/s
| 操作类型 | 机器人类型 | 操作步骤 |
|---|---|---|
| 精细控制前进 / 后退 | 差速 | 右手按住“RB”按键不放,左手操作线速度摇杆:前推 = 前进、后推 = 后退 差速机器人:摇杆偏移前 / 后→停止移动; |
| 单轴控制前进 / 后退 | 右手按住“RB”按键不放,左手操作线速度按钮:前 = 前进、后 = 后退 | |
| 精细控制自旋 | 右手按住“RB”按键不放,右手拇指按住角速度摇杆: 右推 = 顺时针自旋、左推 = 逆时针自旋; 偏移左 / 右→停止移动。 | |
| 精细控制曲线运动 | 右手按住“RB”按键不放,左手操作线速度摇杆,右手拇指按住角速度摇杆 - 前推 + 右推→右前方曲线运动; - 前推 + 左推→左前方曲线运动; - 后推 + 右推→右后方曲线运动; - 后推 + 左推→左后方曲线运动。 |
3.9.4 姿态控制操作
姿态控制操作是指通过手柄按键触发机器人执行预设姿态(站立、蹲下)或指定动作的操作,是机器人完成特定场景任务的关键操作。
注意:
姿态操作过程中不可进行移动操作,移动操作过程中也不可触发姿态操作,避免机械结构冲突。
站立和蹲下姿态操作过程中,不能进行底盘移动,站立姿态和蹲下姿态完成后,可以进行底盘移动;
在底盘移动的过程中,不允许执行站立和蹲下姿态。
| 操作类型 | 机器人类型 | 操作步骤 | 注意事项 |
|---|---|---|---|
| 站立控制 | 差速 | 右手按Y 键 | 用于机器人从包装箱内出来后,控制机器人站立,姿态操作完成后才可切换其他姿态。 |
| 蹲下控制 | 右手按A 键 | 用于机器人蹲下装箱,姿态操作完成后才可切换其他姿态。 蹲下姿态前需确保灵巧手姿态为竖直状态,否则执行蹲下时腰部会和灵巧手发生碰撞。 | |
| 播放动作 1 | 右手按X 键 | 机器人执行3次BULLS动作,恢复到 standby 姿态后才能执行其他操作 | |
| 播放动作 2 | 右手按B 键 | 机器人执行2次GUNS动作,恢复到 standby 姿态后才能执行其他操作 |