
外观
外挂脚本使用指南
外挂脚本作为软件的拓展点,被 Pickwiz 调用,不需要修改核心代码即可添加业务逻辑,灵活适配现场的定制化需求,如补偿机械臂安装误差、单位转换、避障策略调整、协议适配等,不涉及网络通信功能。当系统运行到相应环节时(如计算抓取姿态后、准备发送数据给机械臂前),会自动调用外挂脚本中的这些函数。
目前外挂脚本可以添加的位置有三处:
PickWiz接收到机器人报文时
PickWiz处理占位符信息时
PickWiz发送给机器人报文时
如使用的是除Tcp协议外的其他协议,则只会在处理占位符信息的时候生效

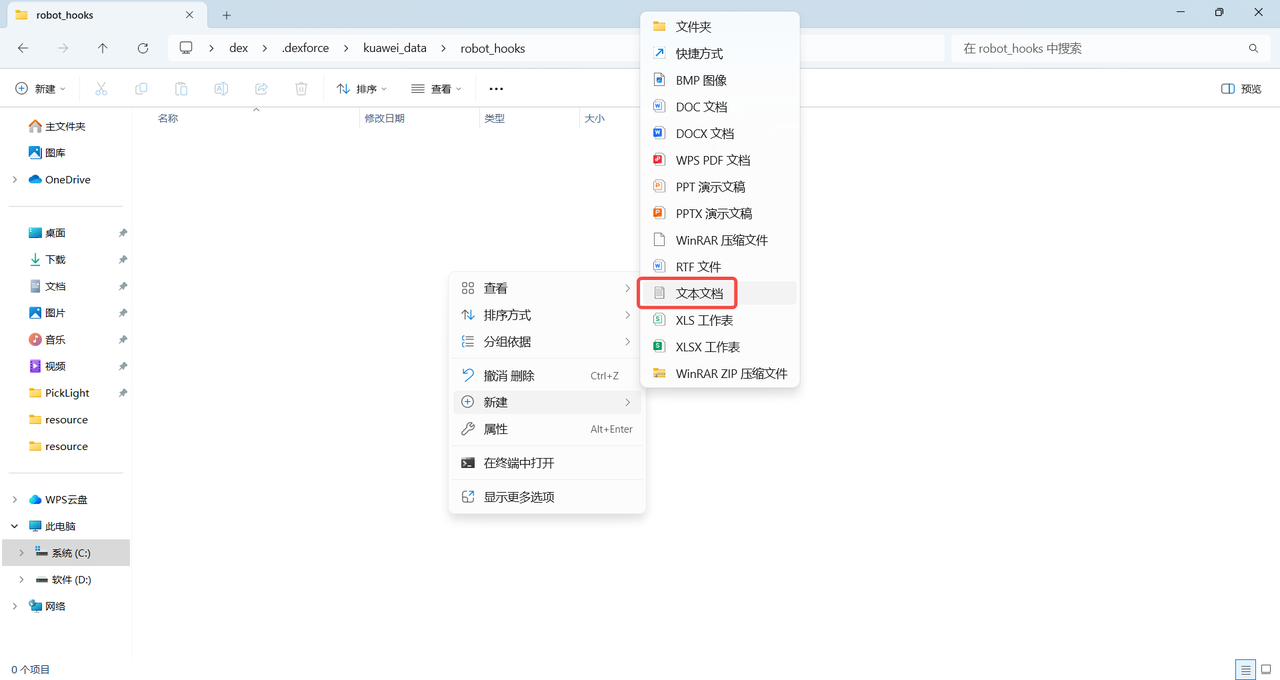
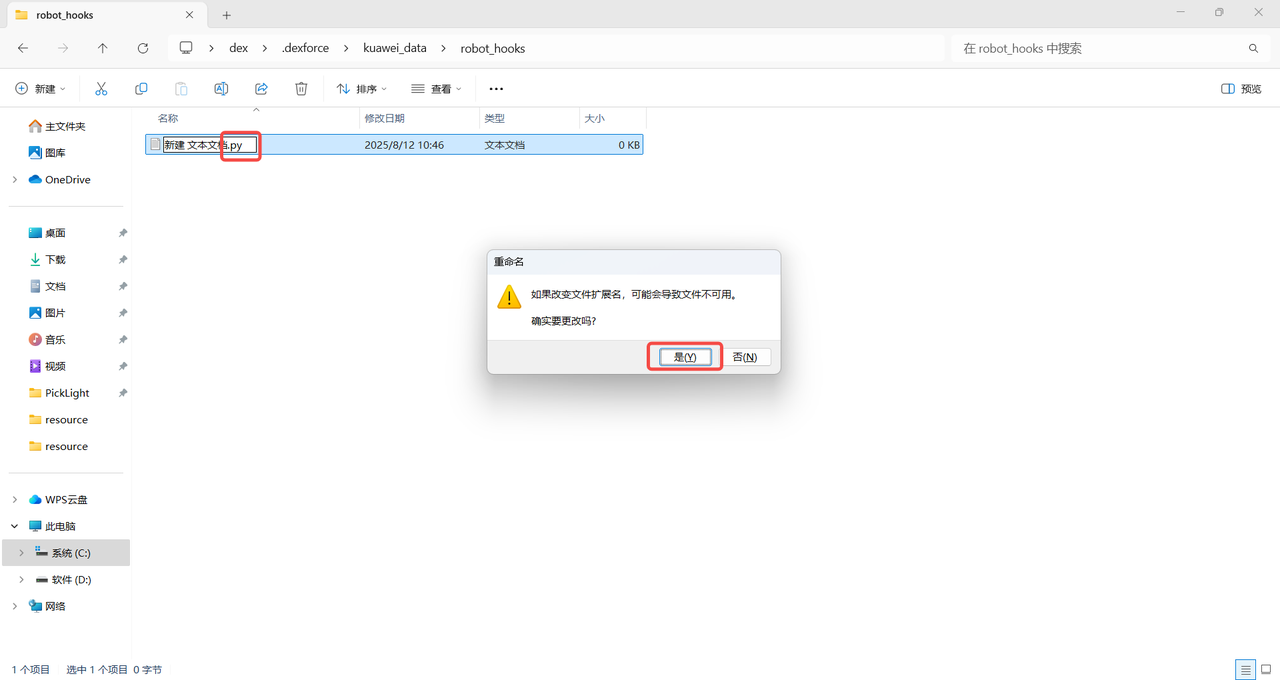
1. 创建Python文件
在目录C:\Users\dex\.dexforce\kuawei_data\robot_hooks下创建一个 python 文件,方法如下图所示。
将如下代码复制到新建的Python文件中。
from typing import List
from PickLight.log.logger import logger_pipe
class AttrHooks(object): #创建1个AttrHooks类,里面包含多个钩子函数,系统会自动识别并调用这些函数
#所有钩子函数都遵循相同的参数格式:
#@staticmethod
#def received_messages_hook(data: str, context) -> str
# PickWiz接收到机器人指令,received_messages_hook
# PickWiz向机器人发送指令前,messages_hook
# PickWiz处理占位符信息,占位符_hook
# data:需要处理的原始数据,类型根据场景而定;context:上下文信息,包含机器人配置,作业配置id等附加信息
# context:机器人上下文信息, 上下文信息,包含机器人配置,作业配置id等附加信息,可以在钩子函数内使用context.get_available_context()获取当前函数可用的上下文信息context:上下文信息,包含机器人配置,作业配置id等附加信息,可通过context.get_available_context()获取当前可用的上下文配置。目前可用的上下文信息具体如下。
机器人配置:robot_config
保留小数点位数:decimals
机器人自由度:dof_type
旋转表达式:rotation_type
长度单位:translation_unit
角度单位:euler_angle_unit
作业配置id:config_ids
作业id:task
标定id:calibration
机器人id:robot
视觉参数id:vision_param
ROI id:roi
产品id:product
夹具id:end_effector
场景物体id:scene_object (勾选了碰撞检测插件时)
2. PickWiz 接收到机器人指令
PickWiz 接收到机器人发送的指令时,可在新建的Python文件中的AttrHooks类增加pre_receive_messages_hook函数,处理接收到的机器人消息。
当前外挂脚本函数仅在“刷新配置”和“发送检测结果”两个特定时刻才会被系统注册生效,故如果修改了
pre_receive_messages_hook函数,需要手动切换配置或触发一次检测才能让修改的函数生效,否则系统仍然会使用旧函数。
示例:当 PickWiz 收到机器人发来的简短指令码(比如示例里的 “210”“211” 这类短报文)时,通过外挂脚本里的pre_receive_messages_hook函数做解析处理,把短指令码直接替换成机器人能识别执行的、带完整参数的指令(比如把 “210” 换成 “d,0,0,0,0,0,0,1”),避免因短指令信息不全导致机器人无法响应或执行出错,快速适配现场机器人的指令交互需求。
@staticmethod
def pre_receive_messages_hook(data: str, context) -> str: #当PickWiz接收到机器人发送的指令,且根据机器人发送的字段不同,调整软件接收的机器人字段
logger_pipe.info("available context: %s", context.get_available_context())
logger_pipe.info("received messages: %s", data)
if data == "210":
data = "d,0,0,0,0,0,0,1"#收到"210"时,替换为完整指令"d,0,0,0,0,0,0,1"
elif data == "211":
data = "d,0,0,0,0,0,0,2"#收到"211"时,替换为"d,0,0,0,0,0,0,2"
return data示例:固定作业配置(比如固定作业配置中 ROI 的 ID),当 PickWiz 接收到机器人指令时,会先检查当前上下文context 里的 ROI ID 是否为 1,如果不是 1,就自动把指令内容改成 “d,0,0,0,0,0,0,1”,以此将 ROI ID 固定为 1,避免现场因 ROI 配置错乱导致抓取、检测等作业出错。
@staticmethod
def pre_receive_messages_hook(data: str, context) -> str: #当PickWiz接收到机器人发送的指令,判断roi 的id是否为1,若不为1,通过占位符${roi_id}切换roi为1
logger_pipe.info("available context: %s", context.get_available_context())
logger_pipe.info("raw messages: %s", data)
if context["config_ids"]["roi"] != 1:
data = "d,0,0,0,0,0,0,1"
logger_pipe.info("modified messages: %s", data)
return data3. 修改占位符信息
占位符可以在系统的各种配置和消息中使用,用于动态替换为实际值,各占位符的含义、默认值、数据类型如下表所示。
| 占位符 | 含义 | 默认值 | 数据类型 |
|---|---|---|---|
| s | 检测结果信号 | 1 | 短整型 |
| vn | 有效实例数量 | 1 | 短整型 |
| ln | 剩余实例数量 | 1 | 短整型 |
| rn | 返回实例数量 | 1 | 短整型 |
| tn | 实例检测总量 | 1 | 短整型 |
| pre_pick | 前进点 | 2,j1,j2,j3,j4,j5,j6,j1,j2,j3,j4,j5,j6 | 浮点型 |
| post_pick | 后撤点 | 2,j1,j2,j3,j4,j5,j6,j1,j2,j3,j4,j5,j6 | 浮点型 |
| pose_index | 抓取点索引 | 1 | 短整型 |
| grasp_pose | 抓取点位姿 | 0,0,0,0,0,0 | 浮点型 |
| grasp_pid | 抓取工件ID | 1 | 短整型 |
| length | 工件长度(沿图像x方向) | 0.2 | 浮点型 |
| width | 工件宽度(沿图像y方向) | 0.2 | 浮点型 |
| height | 工件高度 | 0.1 | 浮点型 |
| rect_length | 工件长度(沿图像x方向) | 0.1 | 浮点型 |
| rect_width | 工件宽度(沿图像y方向) | 0.1 | 浮点型 |
| direction | 工件朝向(0:沿x为横,1:沿y为竖) | 1 | 短整型 |
| left_top | 左上顶点 | x,y,z | 浮点型 |
| right_top | 右上顶点 | x,y,z | 浮点型 |
| left_bottom | 左下顶点 | x,y,z | 浮点型 |
| right_bottom | 右下顶点 | x,y,z | 浮点型 |
| entity | 返回实例类型(0:工件,1:托盘) | 0 | 短整型 |
| category_id | 工件类别 | 0 | 短整型 |
| aux_info | 额外信息 | ... | 浮点型 |
| radius | 圆面半径 | 0.2 | 浮点型 |
| pmf_height | 圆柱高度 | 0.2 | 浮点型 |
| sr | 自动标定采样结果 | 1 | 短整型 |
| cp | 自动标定下次采样位姿 | 0,0,0,0,0,0 | 浮点型 |
| so_size_id | (碰撞检测)料框尺寸ID | 1 | 短整型 |
| so_size | (碰撞检测)料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) | 0.1,0.1,0.1,0.1,0.1,0.1 | 浮点型 |
| so_pose | (碰撞检测)料框位姿 | 0,0,0,0,0,0 | 浮点型 |
如需修改占位符信息,可在新建的Python文件中的AttrHooks类增加占位符_hook函数。
示例:调整检测结果信号
@staticmethod
def s_hook(data: List[int], context) -> List[int]: # 调整检测结果信号,当返回信号不为成功(100)时,其他都置为异常(-1)
logger_pipe.info("raw signal: %s", data)
if data and data[0] != 100:
data[0] = -1
logger_pipe.info("modified signal: %s", data)
return data示例:调整抓取高度
@staticmethod
def grasp_pose_hook(data: List[float], context) -> List[float]: #调整抓取高度,把所有抓取点的Z坐标增加0.01。适用于补偿机械臂安装误差,或根据工件高度微调抓取点。
logger_pipe.info("raw poses: %s", data)
# 增加Z坐标值
if data and len(data) >= 6:
modified_data = data.copy()
pose_size = 6 # 每个姿态由6个数值组成
poses_count = len(data) // pose_size
for i in range(poses_count):
z_index = i * pose_size + 2 # Z坐标在第3个位置(索引2)
if z_index < len(modified_data):
modified_data[z_index] += 0.01 # Z坐标增加0.01
logger_pipe.info("modified poses: %s", modified_data)
return modified_data
return data4. PickWiz 向机器人发送指令前
PickWiz 向机器人发送指令前,如需处理消息,可在新建的Python文件中的AttrHooks类增加pre_send_messages_hook函数。
在机器人未配置 “拆分报文” 功能时,
data列表通常只有 1 个元素,即待发送的完整指令报文,函数只需处理这一个元素即可。当机器人配置了 “拆分报文” 功能(即将一条完整指令拆分为多条子报文发送)时,
data列表会包含所有拆分后的子报文,每个子报文作为列表的一个元素,函数需对列表中的所有子报文元素分别处理,确保每条子报文都符合发送要求。
示例:在 PickWiz 向机器人发送指令前,调整指令字符串里第一位占位符的内容,该函数会先读取待发送的原始指令列表data(默认列表长度为 1,仅含一条完整指令),然后按现场需求判断并修改指令字符串第一位占位符的内容(比如当第一位占位符对应的信号不是成功值 100 时,就将其强制改为 - 1),确保机器人收到的指令中第一位占位符内容符合作业要求,避免因原始占位符数据异常导致机器人执行错误。
@staticmethod
def pre_send_messages_hook(data: List[str], context) -> List[str]:# 当第一位占位符为${s}时,调整返回信号,当返回信号不为成功(100)时,其他都置为异常(-1)
logger_pipe.info("raw messages: %s", data[0])
result = data[0]
if result and result.split(",")[0] != "100":
data[0] = "-1" + result[result.find(","):]
logger_pipe.info("modified messages: %s", data[0])
return data