
外观
重复定位精度操作指南
在PickWiz中,重复定位精度指视觉识别系统对同一物体位置进行多次识别时结果的一致性误差计算。可用于排查视觉系统识别的稳定性,影响因素包含相机精度、视觉识别精度等。
1. 使用相机数据计算重复定位精度
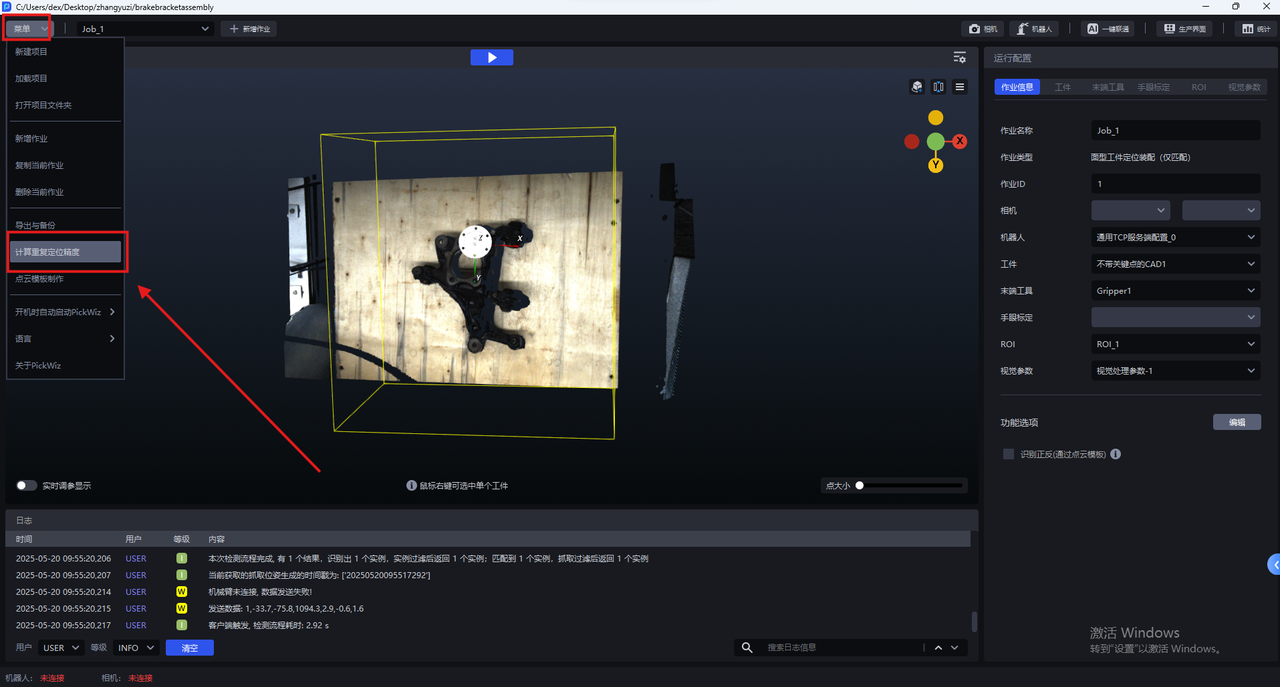
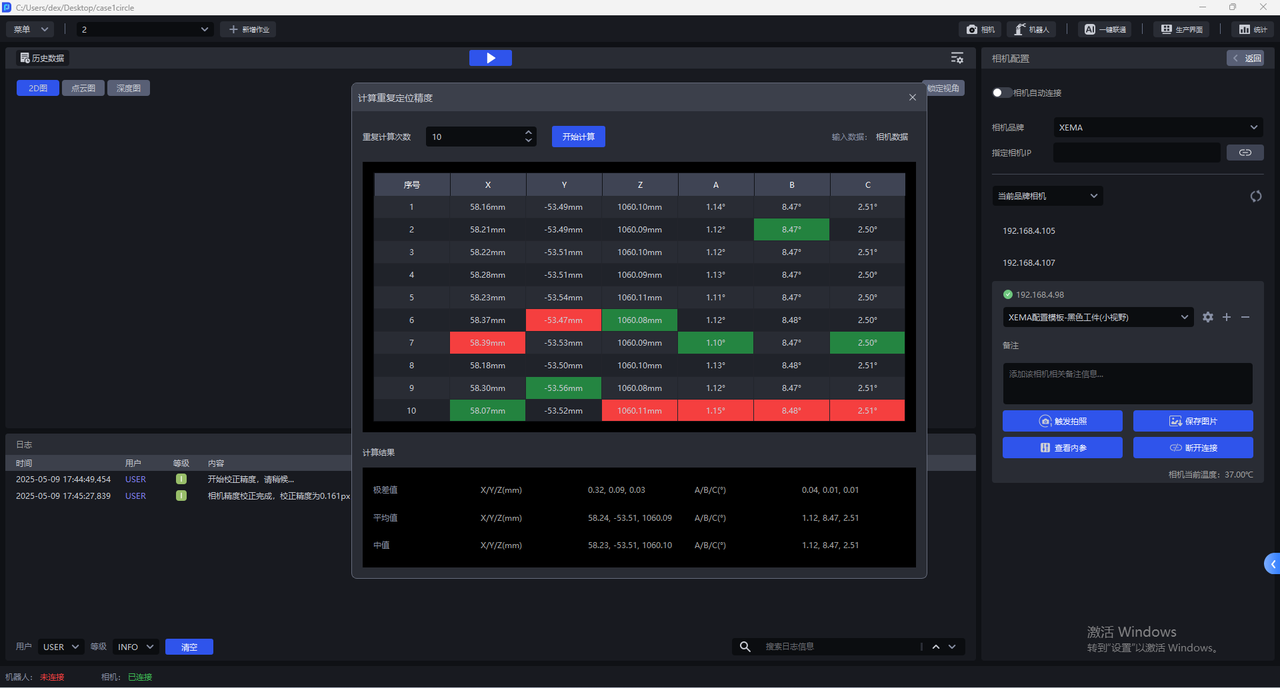
进入PickWiz主页面后,连接相机、机器人,将单个工件放置在相机视野内,按照实际场景配置作业(参见 作业操作指南)。点击菜单,单击计算重复定位精度。
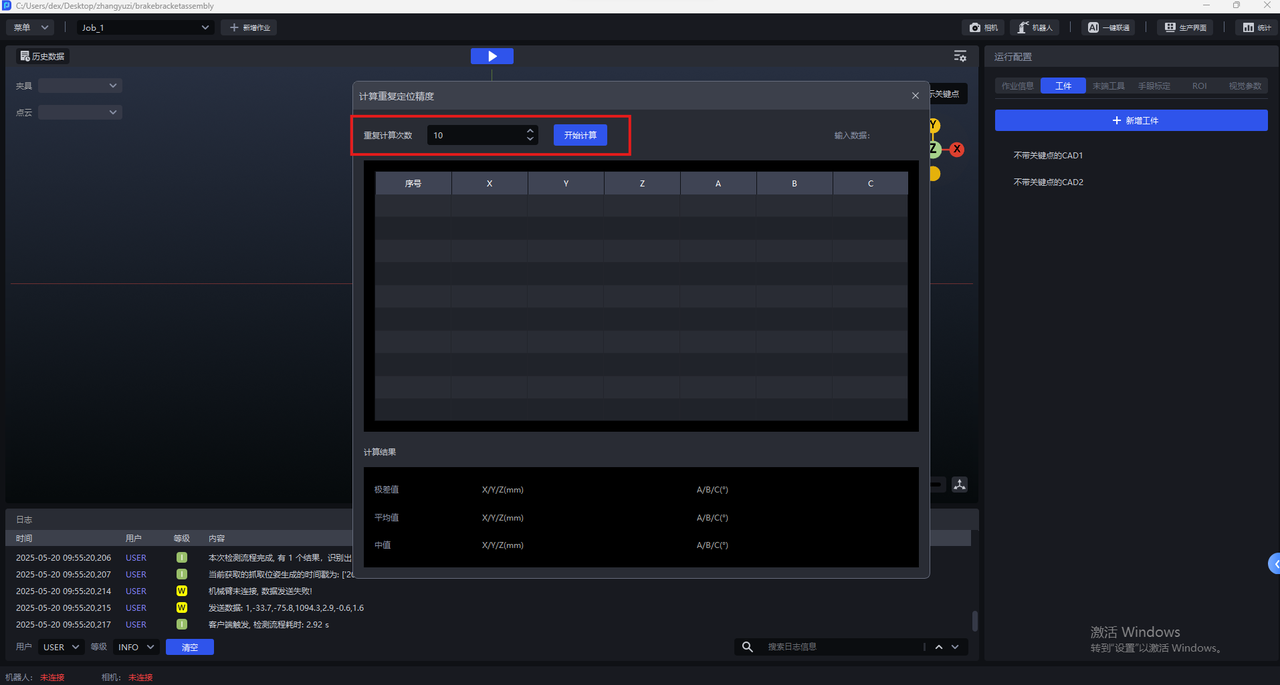
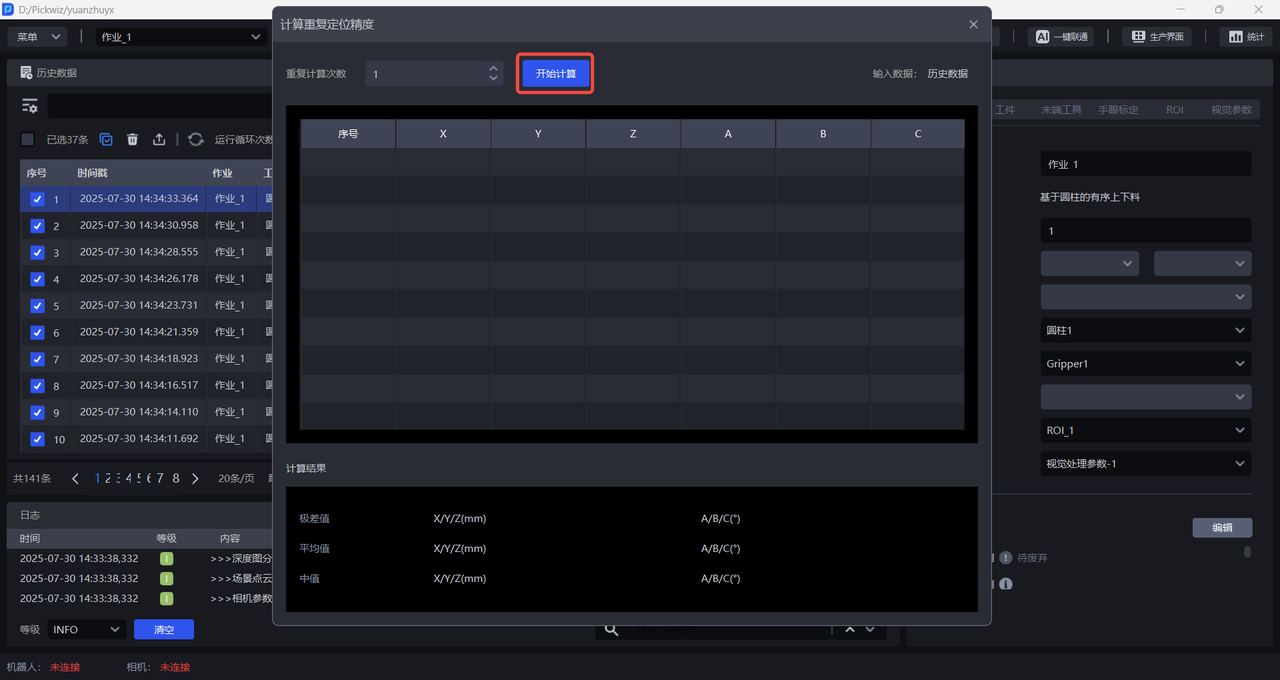
进入计算重复定位精度面板,设置重复计算次数。次数默认为10次,次数越多,计算结果越准确。设置完成后,点击开始计算。
注意
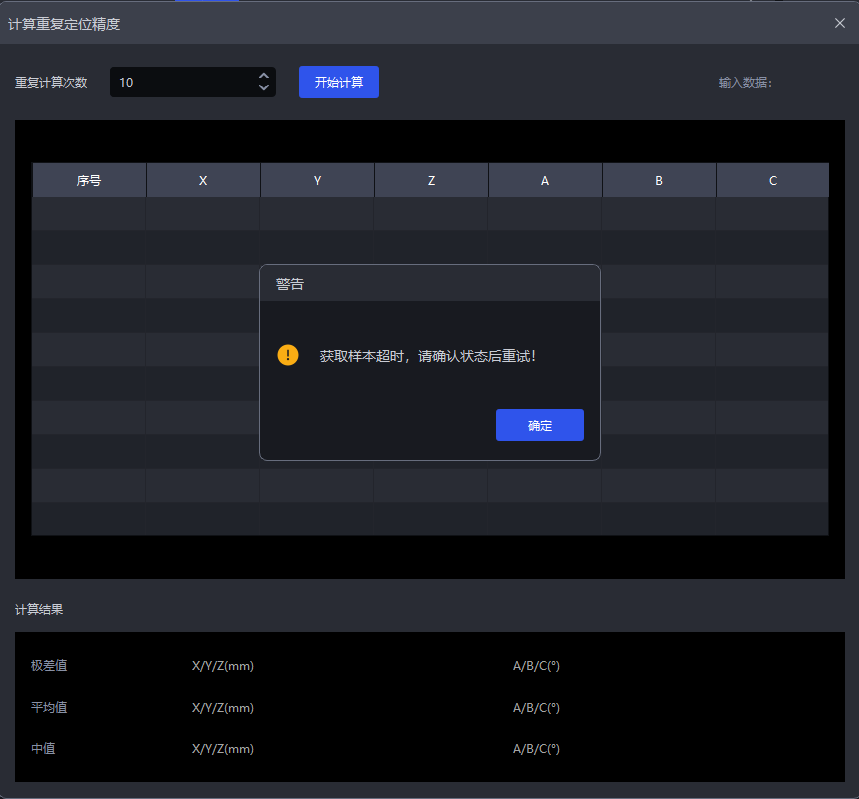
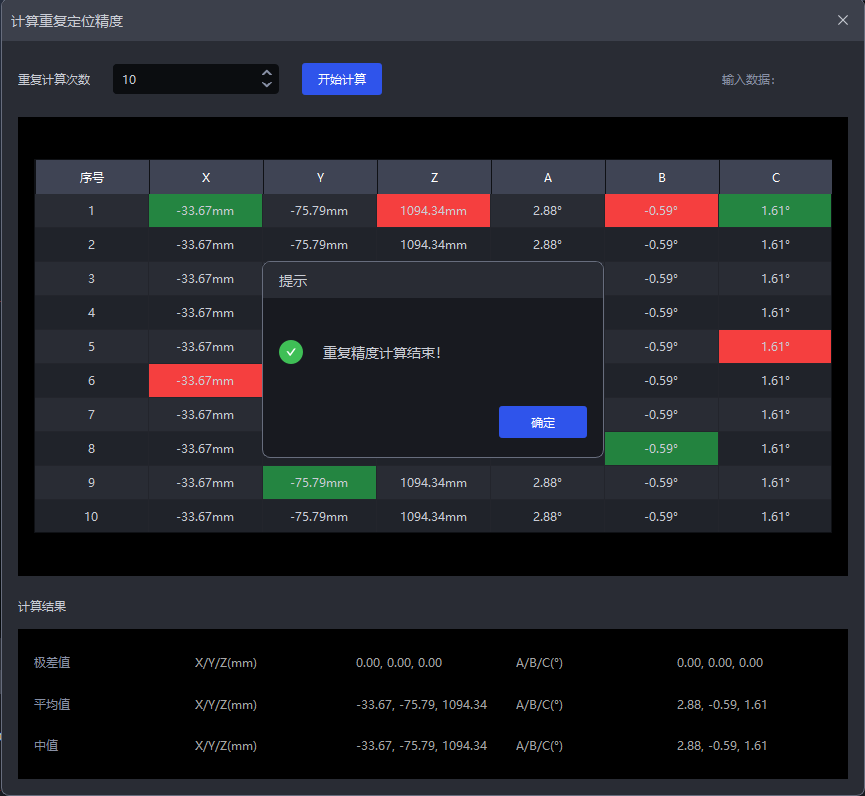
若点击
开始计算后,长时间未产生位姿数据、运行进度,随后出现超时弹窗(如下图所示),则出现异常运行。请点击确定后,关闭计算重复精度界面,前往主页面日志处排查异常原因。
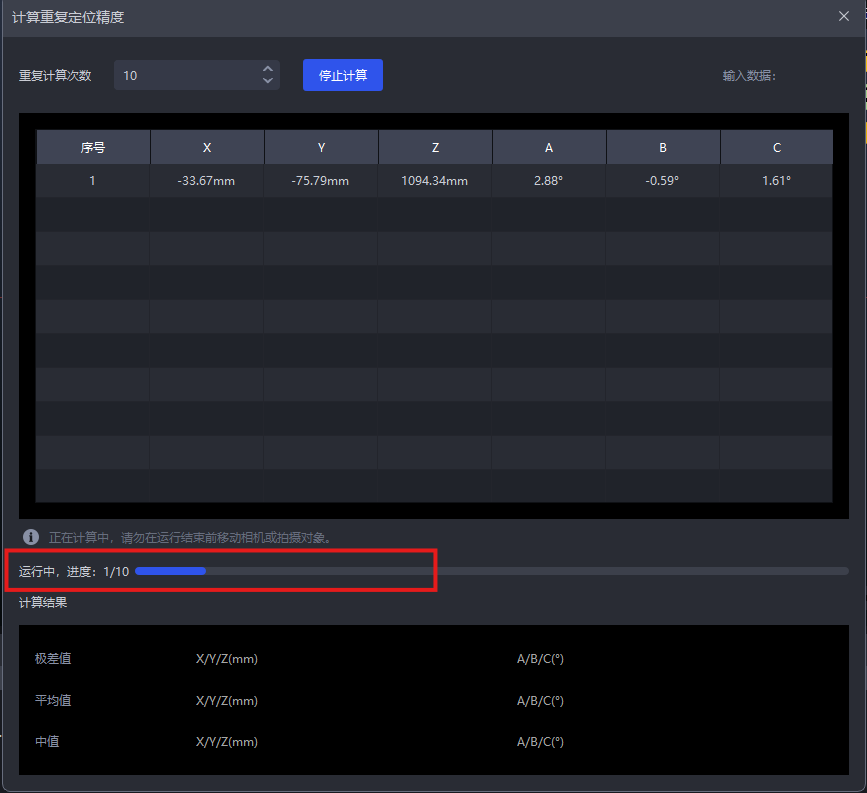
精度计算自动运行,运行中获取的位姿信息将自动在页面中进行统计,并计算位姿的极差值、平均值、中值。可在计算结果上方查看运行进度。
设置的重复计算次数完成后,会自动出现提示弹窗,点击确定。
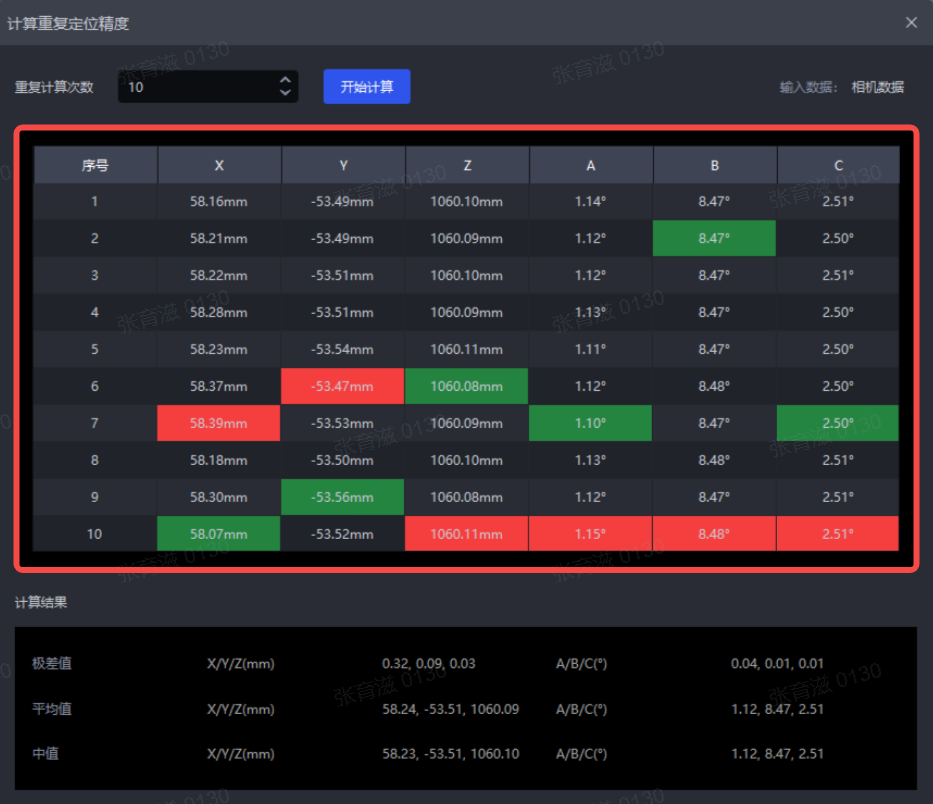
如下图所示,重复精度计算结束后,可在界面查看每次工件位姿信息与精度计算结果。
(1)工件位姿信息
如下图所示,可在界面中部查看每次计算中获得的工件6D位姿信息(X、Y、Z、A、B、C)。其中红色数值为N次计算中每个自由度数据的最大值,绿色数值为N次计算中每个自由度数据的最小值。
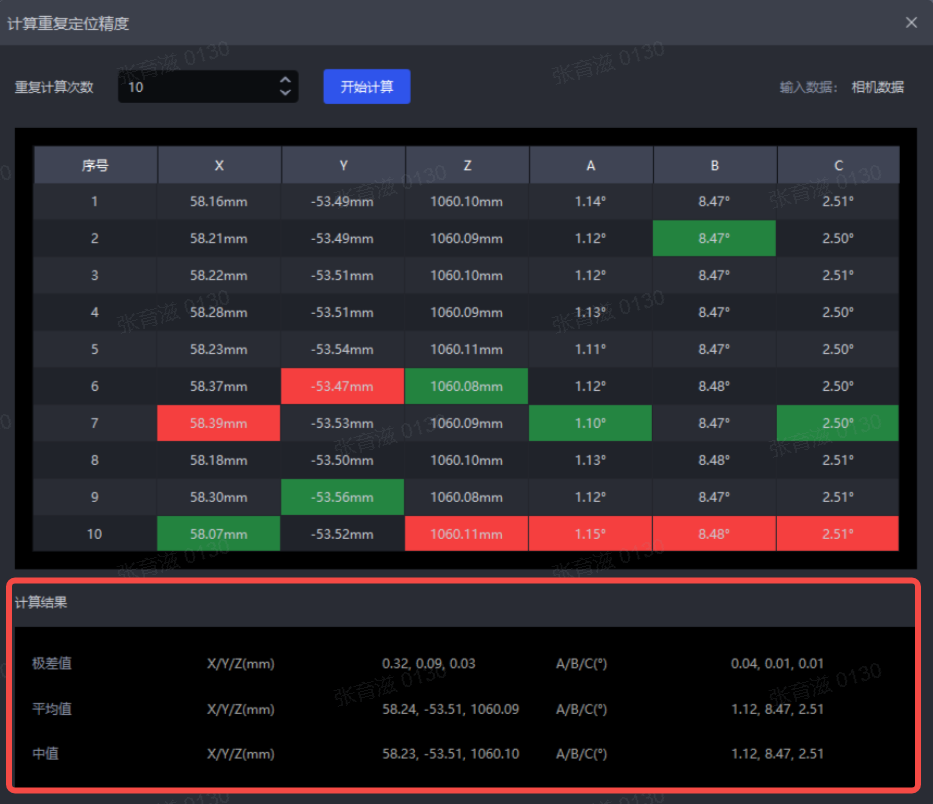
(2)精度计算结果
可在界面下部查看N次运行中各参数的极差值、平均值、中值。
| 参数 | 计算方式 |
|---|---|
| 极差值 | N次计算结果中每种自由度数据最大值与最小值之差 |
| 平均值 | N次计算结果中每种自由度数据之和 / N |
| 中值 | N次计算结果中每种自由度数据按照大小排序后的中位数 |
多数情况下,X/Y/Z轴坐标的极差值小于0.5 mm即可满足一般场景的精度要求。如果实际场景对精度要求较高,X/Y/Z轴坐标的极差值应更小,例如±0.1 mm。若极差值过大,可通过检查以下方面提高精度:机器人与相机安装是否牢固、机器人绝对精度、相机点云质量、相机内参、识别精度等。
2. 使用历史数据计算重复定位精度
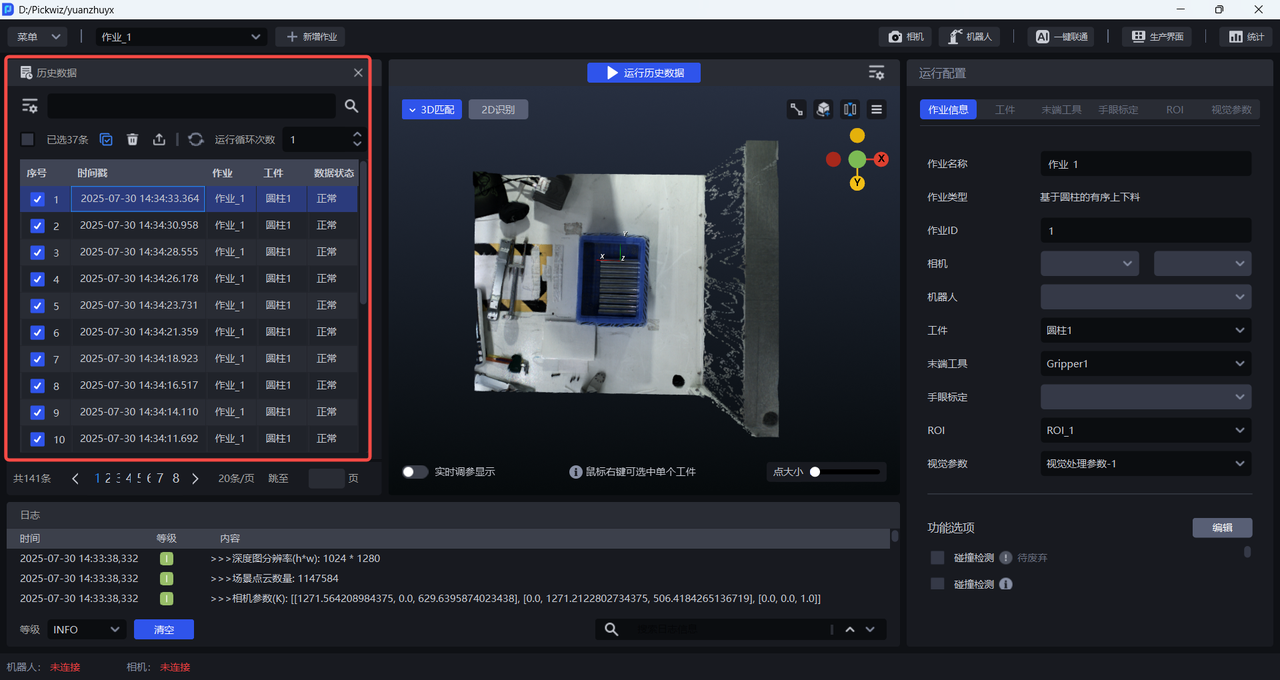
- 勾选多个历史数据
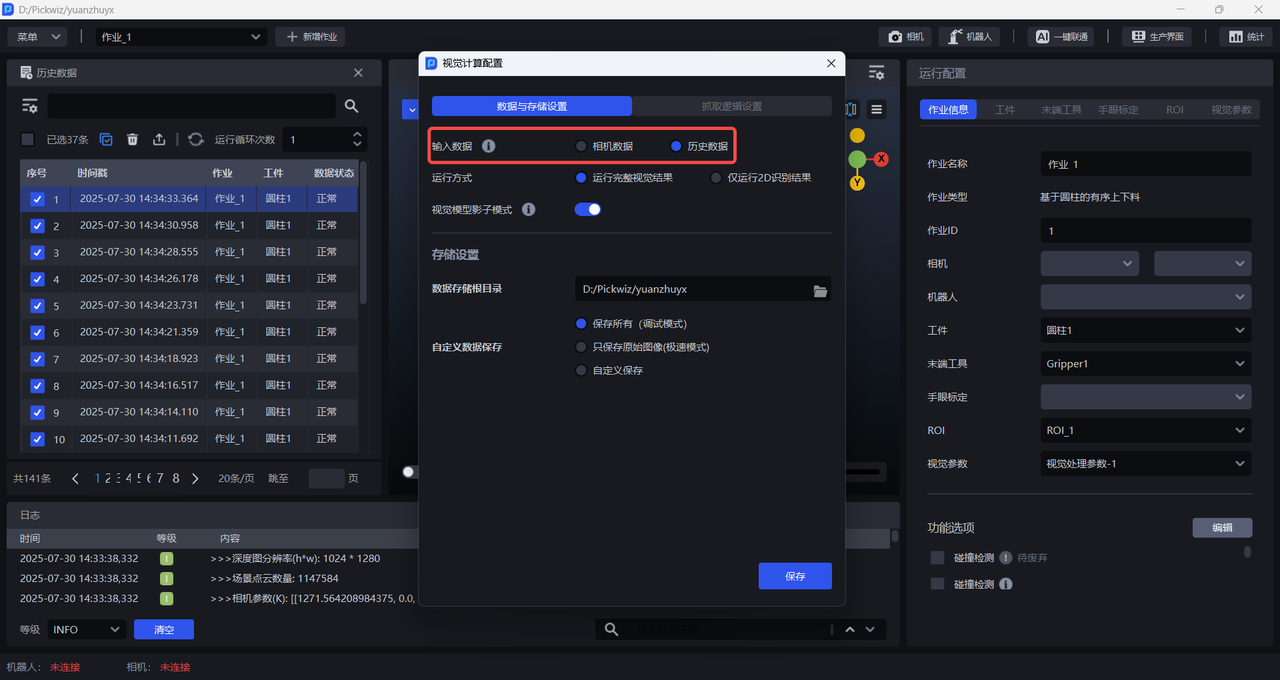
- 在
视觉计算配置界面将输入数据切换为历史数据并保存
- 然后在
菜单点击计算重复定位精度,打开计算重复定位精度界面点击开始计算
- 计算结束后,可在界面查看每次工件位姿信息与精度计算结果。