
外观
机器人配置与通信操作指南
机器人配置与通信是指 视觉软件PickWiz 与 机器人/PLC(可编程逻辑控制器 Programmable Logic Controller) 通过通信协议建立通信,保证机器人/PLC与 PickWiz软件 实时和稳定地传输数据。
PickWiz 支持 TCP服务端、TCP客户端、ModBus、三菱MC、西门子Snap7 五种通信方式。
TCP服务端是 PickWiz 作为TCP服务端,机器人作为TCP客户端的通信方式,PickWiz 与机器人进行通信时,并非主动控制机器人端,而是机器人端向 PickWiz 发送TCP指令,PickWiz 接收到指令后返回响应数据。因此,采取TCP通信方式需要用户在机器人端编写程序,实现与PickWiz通信。
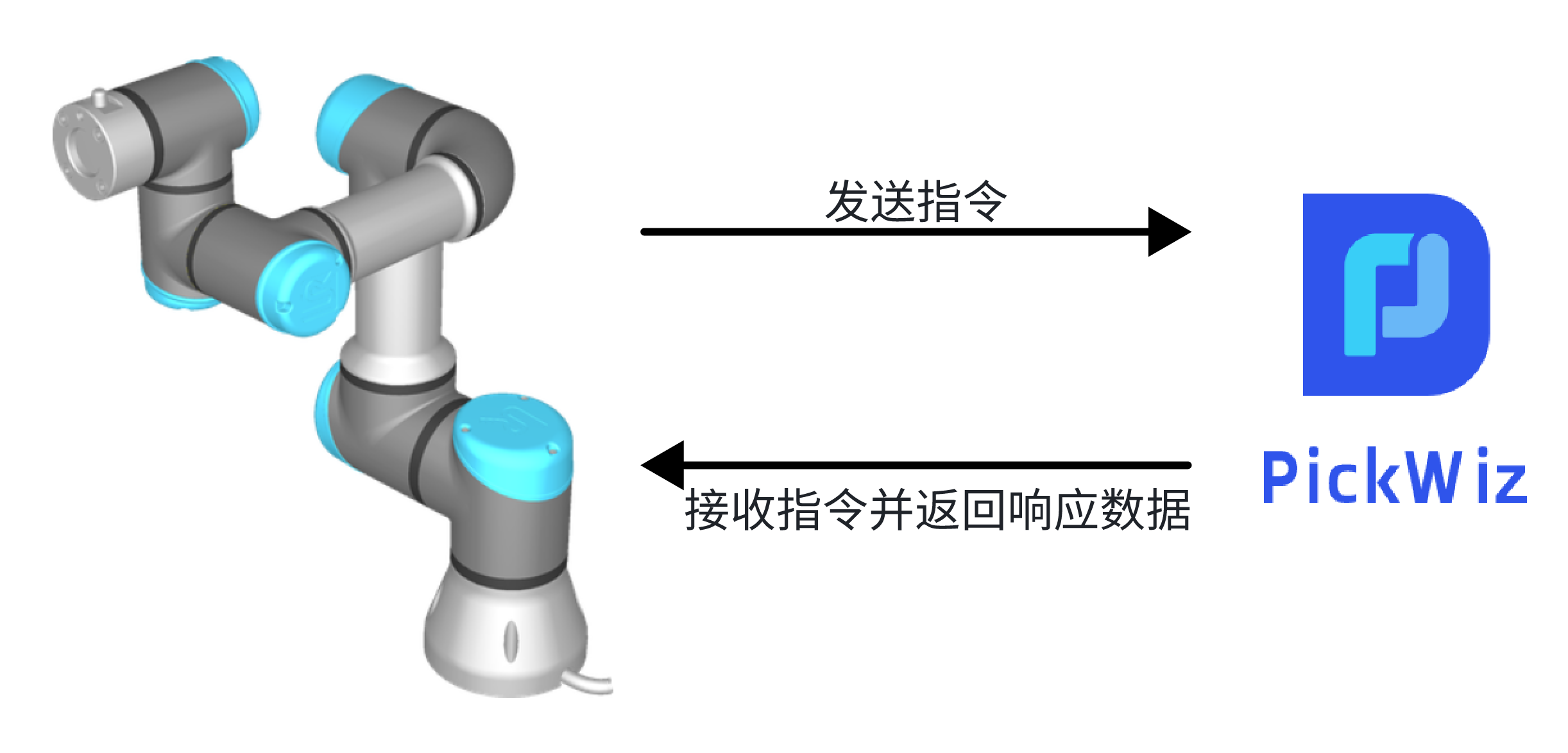
具体请参照:TCP服务端通信配置
TCP客户端、ModBus 、三菱MC 、西门子Snap7 是 PickWiz 作为客户端、机器人作为服务端的通信方式,PickWiz 与机器人进行通信时主动控制机器人,向机器人发送指令,机器人接收到指令后执行指令并返回数据。
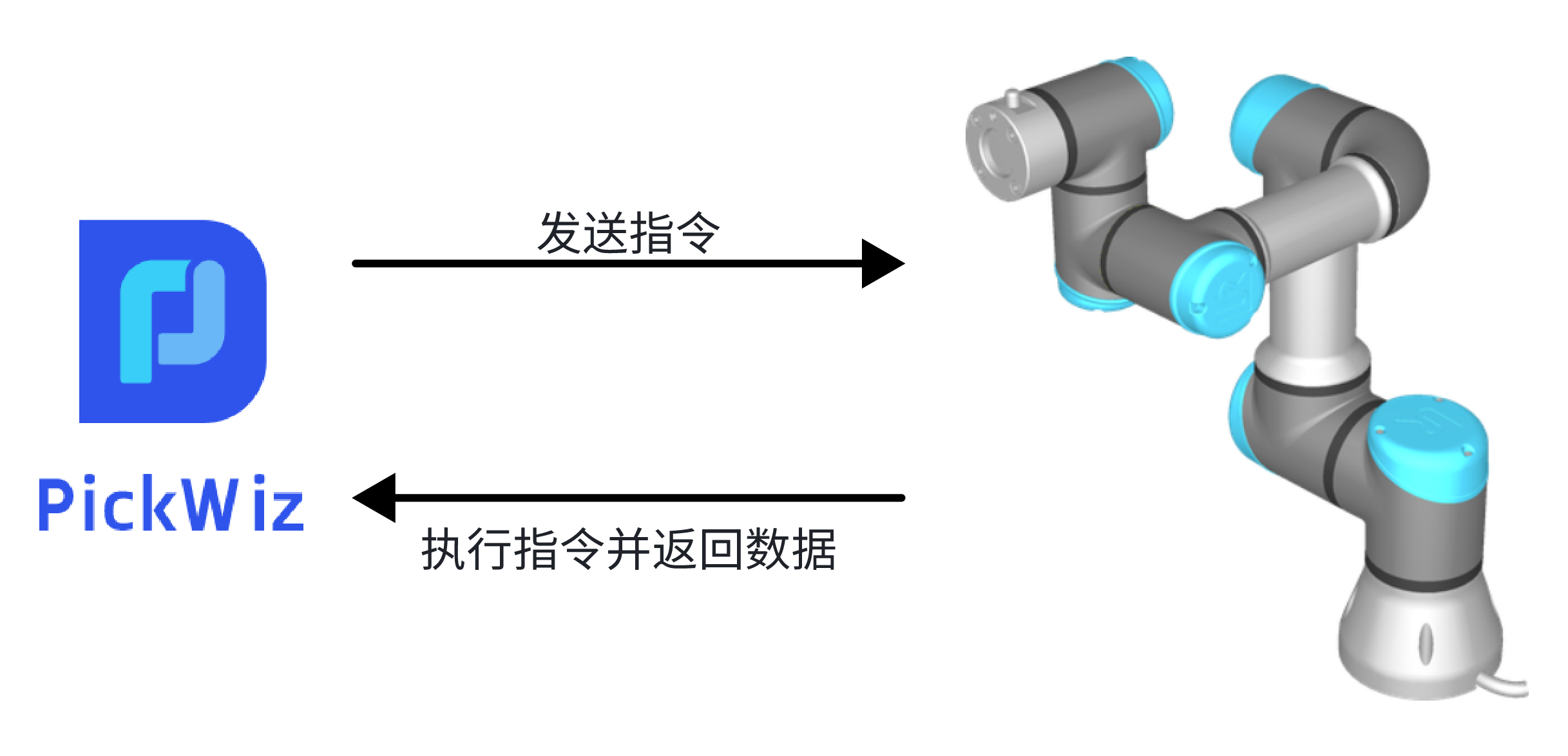
具体请参照:
在配置机器人通信之前,请先将机器人通信程序及相关配置文件,导入到机器人/PLC系统中,然后使用网线连接工控机与机器人/PLC,并且确认机器人/PLC与工控机的IP网段一致。
PickWiz 目前适配的机器人/PLC品牌请参考: 机器人标准程序文档