
外观
手眼标定操作指南
“手”即机器人,“眼”即3D相机,手眼标定旨在确定相机坐标系与机器人坐标系之间的对应关系,帮助 Pickwiz 准确地将相机坐标系下的位姿信息转换为机器人运动所需的空间坐标信息,从而实现准确的视觉引导抓取放置。
手眼标定的流程如下:

标定前准备:为手眼标定准备所需的物料和条件;
标定信息配置:根据相机安装方式、标定方式等选择手眼标定配置;
标定前检查:检查机器人、标定板等是否完成安装并满足标定要求;
采集样本:拍照采集标定板样本;
标定结果检查与分析:对结果进行检查和分析,判断标定精度是否满足实际需求;
选择标定配置:为作业场景选择相应的标定配置。
请参照该操作指南进行相机与机器人的手眼标定,此外当发生如下情况后需要重新进行手眼标定:
相机与机器人基座(EyeToHand) 或相机与机器人末端法兰(EyeInHand) 之间发生位置变化;
更换其他相机;
更换其他机器人。
1. 标定前准备
在手眼标定前,需做好以下准备工作:
(1)完成 3D视觉引导套件硬件搭建
请首先完成机器人、相机和工控机的安装与连接
(2)完成 新建项目和新建作业
请参照 项目操作指南 和 作业操作指南 新建项目和作业,满足实际场景需求
(3)完成相机连接和调参
请参照 相机连接与调参指南 连接相机、调整相机成像质量、校验相机精度
(4)完成机器人通信配置
请参照 机器人配置与通信操作指南 建立机器人与 Pickwiz 的通信
(5)准备标定所需物料
请确保标定板平整、清晰,无明显刮花污垢,无折弯变形
如果相机安装在机械臂的外部,需要将标定板安装在机器人末端工具上,请确保标定板安装稳固,位于相机视野中。
先将标定板连接件安装到机器人末端法兰,再将标定板安装到连接件上。如果机器人末端法兰上安装了不可拆卸的夹具,可将标定板直接安装到夹具上。
如果标定方式采取针尖工具戳点标定,请确保针尖外形完整,无变形,需要将针尖工具安装在机器人上,可将针尖工具安装到机器人末端法兰或夹具上。
2. 标定信息配置
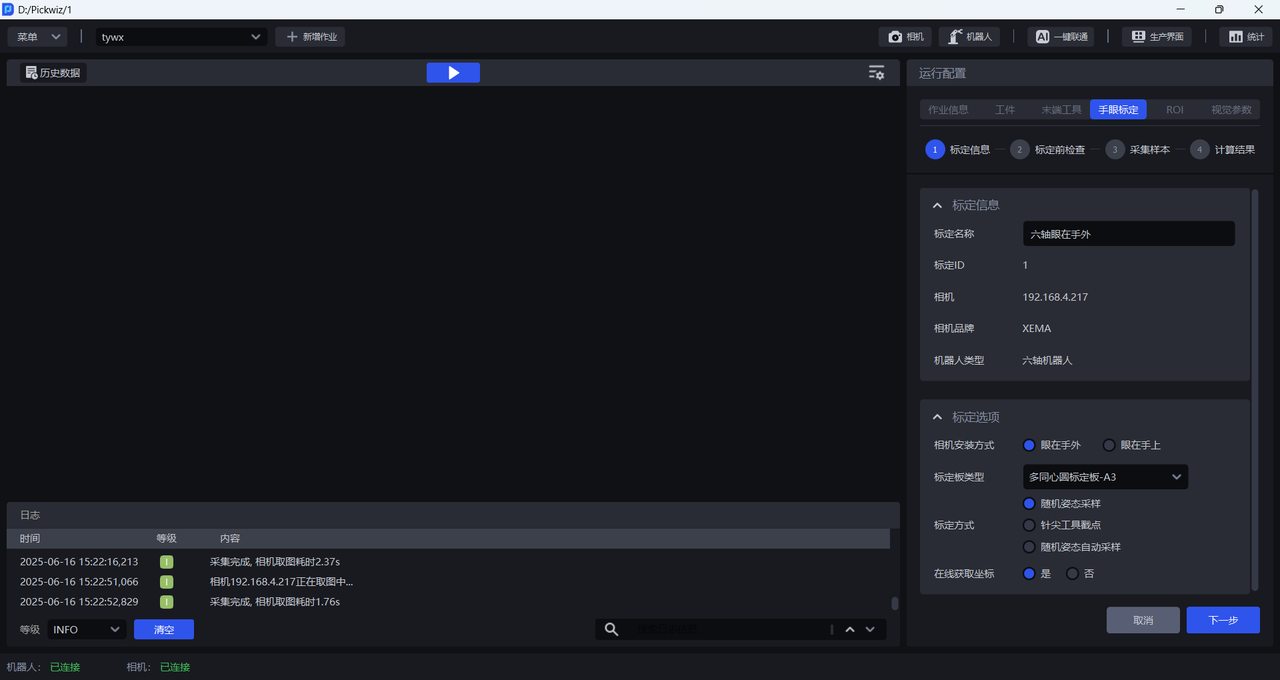
标定名称可自行命名当前的标定配置标定ID用于机器人切换标定配置相机为当前连接的相机的IP地址相机品牌为当前连接的相机的品牌机器人类型与机器人配置中的机器人类型保持一致
手眼标定需要确定相机在机器人坐标系中的精确位置和方向,因此相机类型、相机安装方式、机器人类型、数据采集方式都会影响具体的标定方法和流程;
在采集样本前,需对相机安装方式、标定板类型、标定方式、在线获取坐标进行配置,完成配置的手眼标定不能再修改,如配置错误可删除标定后再新增。
2.1 相机安装方式
- 眼在手上(EyeInHand):相机固定安装在机械臂的末端工具上,随着机械臂的运动而运动,相机相对于机器人末端法兰是固定的,标定板相对于机器人基座是固定的。

相机固定安装在机械臂的末端工具上,机器人类型为三轴机器人,标定流程请参照 眼在手上三轴机器人标定
相机固定安装在机械臂的末端工具上,机器人类型为四轴机器人,标定流程请参照 眼在手上四轴机器人标定
相机固定安装在机械臂的末端工具上,机器人类型为六轴机器人,标定流程请参照 眼在手上六轴机器人标定
- 眼在手外(EyeToHand):相机固定安装在机械臂的外部,不随机械臂运动而运动,相机相对于机器人基座是固定的,标定板相对于机器人末端法兰是固定的。

相机固定安装在机械臂的外部,机器人类型为三轴机器人,标定流程请参照 眼在手外三轴机器人标定
相机固定安装在机械臂的外部,机器人类型为四轴机器人,标定流程请参照 眼在手外四轴机器人标定
相机固定安装在机械臂的外部,机器人类型为六轴机器人,标定流程请参照 眼在手外六轴机器人标定
2.2 标定板类型
选择合适的标定板影响到标定过程的易用性和标定结果的准确性,是成功进行手眼标定的关键之一。跨维现有的标定板如下表,可下载打印标定板图纸。
| 机器人类型 | 相机安装高度 | 选择标定板 |
|---|---|---|
| 六轴机器人 | 0.5米以下 | A6多同心圆标定板 |
| 1.5米以下 | A5多同心圆标定板 | |
| 1.5米 -- 2.5米 | A4多同心圆标定板 | |
| 2.5米以上 | A3多同心圆标定板 | |
| 三轴/四轴机器人 | 0.5米以下 | A6多同心圆标定板 |
| 1.5米以下 | A5多同心圆标定板 | |
| 1.5米 -- 2.5米 | A4多同心圆标定板 | |
| 2.5米以上 | A3多同心圆标定板 |
2.3 标定方式
随机姿态采样标定:随机移动机器人的末端工具,在多个位置采集标定板样本、识别标定板上的特征点、采集末端工具的随机位姿。
针尖工具戳点标定:将针尖工具安装在机器人末端法兰上,标定板放置在工作平台上,使针尖工具与标定板垂直,让针尖工具触碰标定板上的不同圆点。
针尖工具戳点标定适用于机器人活动空间局促、标定板无法安装等情况。建议3轴和4轴机器人使用该方式。
- 随机姿态自动采样:相比于“随机姿态采样”,该标定方式支持设置一个移动范围,系统自动计算范围内的随机移动点位,随后机器人根据点位移动,在多个位置采集标定板样本、识别标定板上的特征点、采集末端工具的随机位姿。该标定过程更快速,交互更简单。
2.4 在线获取坐标
如果机器人写有对应的标定程序,对标定板采样时机器人运行标定程序自动将位姿发送给 PickWiz ,在线获取坐标 选择 是。如需自行编写标定程序请参照 机器人程序收集
如果机器人未写对应的标定程序,则采样标定板时需手动输入机器人末端工具的位姿,在线获取坐标 选择 否。
3. 标定前检查
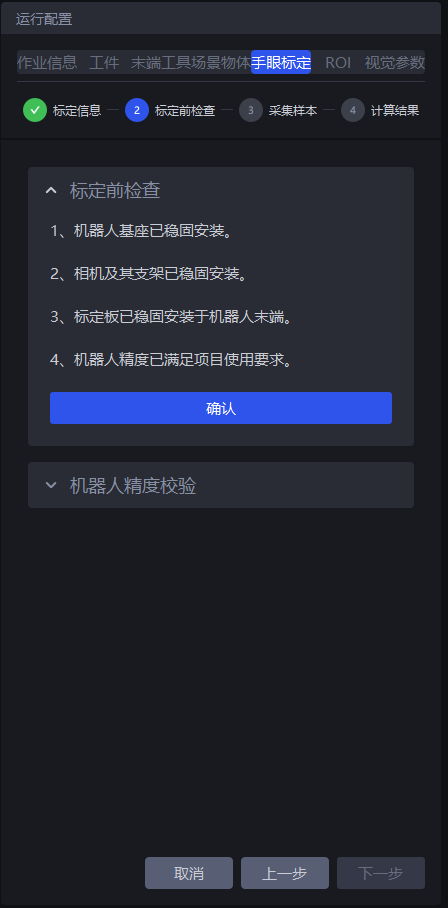
- 确保机器人基座已稳固安装
在进行手眼标定前,应仔细检查机器人基座的安装情况,若机器人基座未牢固安装,机器人运动时会发生明显的晃动,影响机器人精度,从而影响标定结果。
按如下步骤检查机器人基座的安装是否满足要求:
其一,安装机器人基座的平面必须平整,保持清洁;
其二,操控机器人以 100% 的速度大幅度地平移或旋转,观察机器人是否存在晃动的迹象,如有晃动请重新调整固定机器人基座,保证机器人运动时不发生位移、倾斜等问题;
其三,检查机器人本体和基座之间是否紧密连接,拧紧螺丝防止松动。
- 确保相机及其支架已稳固安装
在进行手眼标定前,应仔细检查相机及其支架的安装情况,若相机及其支架未牢固安装,会影响相机成像质量,从而影响标定结果。
按如下步骤检查相机及其支架的安装是否满足要求:
其一,检查相机支架是否为机加工件,支架的材质应避免铝型材;
其二,手动晃动支架,观察支架是否存在明显晃动,如有晃动请重新调整固定支架;
其三,移动支架上的滑动部件,观察其是否存在明显晃动,同时测试重复定位精度,保证重复定位精度满足实际场景需求;
其四,摇晃相机,观察相机是否存在明显晃动,确保相机稳固安装。
- 确保标定板安装到位
如果相机安装方式为眼在手外,相机固定安装在机械臂的外部,应将标定板安装于机器人末端。晃动标定板,检查标定板是否存在明显晃动,如有晃动请拧紧螺丝调整固定标定板。
如果相机安装方式为眼在手上,相机固定安装在机械臂的末端工具上,无需安装标定板,应将标定板平放在工作平面,同时保证标定板位于相机视野中,覆盖工件所在区域。
如果标定方式为针尖工具戳点标定,应将标定板固定在工作平台,防止针尖工具在标定板上戳点时标定板发生位移。
- 确保机器人精度已满足项目使用要求
若机器人精度不满足项目使用要求,请参照 标定校验校正机器人精度。
4. 采集样本
根据不同的相机安装方式、机器人类型选择不同的标定流程
| 相机安装方式 | 机器人类型 | 标定流程 |
|---|---|---|
| 眼在手上 | 三轴机器人 | 眼在手上三轴机器人标定 |
| 四轴机器人 | 眼在手上四轴机器人标定 | |
| 六轴机器人 | 眼在手上六轴机器人标定 | |
| 眼在手外 | 三轴机器人 | 眼在手外三轴机器人标定 |
| 四轴机器人 | 眼在手外四轴机器人标定 | |
| 六轴机器人 | 眼在手外六轴机器人标定 |
5. 标定结果检查与分析
手眼标定结果的精度是影响机器人抓取精度的重要因素之一,因此标定完成后,需要对标定结果进行检查,判断标定结果的精度是否能够满足实际场景需求。如果标定误差超出正常范围,则需要定位误差原因,请参考 标定结果检查与分析 分析标定结果,解决问题并再次检查直到标定结果精度满足场景要求。
6. 选择标定配置
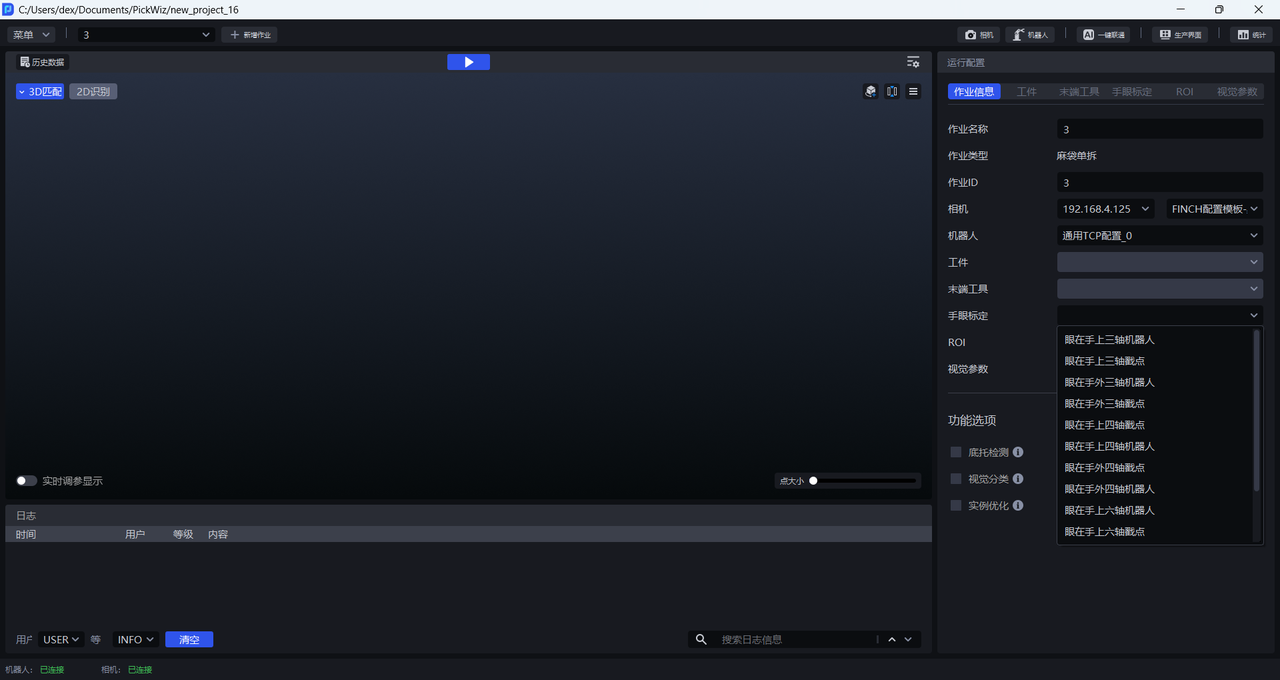
标定流程结束后,回到运行配置界面,点击作业信息,点击手眼标定的下拉框,选中对应手眼标定配置。
7. 附录
7.1 术语和概念
相机内参:相机内参是相机内部的基本参数,包括镜头焦距、主点坐标、畸变系数等,反映了相机的内部成像特性。其中,焦距表示相机镜头的光学特性,主点坐标是2D图像的中心位置,畸变系数用于校正相机成像过程中产生的各种畸变。相机内参用于描述像素坐标系与相机坐标系之间的关系,一般相机出厂时内参已标定完成,保存在相机内部。
相机外参:相机外参反映了相机在外部空间中的位置和朝向,包括旋转矩阵和平移向量两个参数。旋转矩阵描述了相机坐标系相对于世界坐标系的旋转关系,它由三个旋转角度(如绕x,y,z轴的旋转角度)组成,用于表示相机的姿态;平移向量则表示相机坐标系原点在世界坐标系中的位置。相机外参用于描述相机坐标系与世界坐标系之间的关系,会随着相机的位置和姿态变化而变化,因此针对每个拍摄情况都需要重新校正相机外参。
相机精度:指相机的标定精度,即相机在实际使用中测量结果与真实值的接近程度,较高的相机精度意味着相机能够更准确地捕捉和测量物体的位姿。相机精度受到多种因素的影响,包括相机的硬件质量(如镜头质量、图像传感器性能等)、标定方法的准确性、使用环境(如光照条件、温度、湿度等)以及相机的安装和调试情况等。
手眼标定:机器人与相机在不同的使用场景下其相对位姿不固定,需要在工作现场进行标定才能获得相机与机器人之间的手眼关系。
标定方式:采集标定板样本的方式,分为随机姿态采样标定和针尖工具戳点标定,都属于手动标定。
相机安装方式:相机在视觉引导套件中的安装方式,分为眼在手上和眼在手外。
标定点:指 指在标定过程中相机采集标定板样本时机器人的位姿。随机姿态采样标定时,标定点是每次采样时机器人法兰盘中心的位姿。针尖工具戳点标定时,标定点是每次采样时的针尖位姿。
特征点:指标定板上同心圆的圆心。标定时,软件将从采集的标定板图像(2D图和深度图)计算标定圆的圆心像素坐标以及圆心在相机坐标系下的坐标。再基于采集到的标定圆数据计算相机外参。
点云误差(平均距离):表示点云波动,若点云误差(平均距离)大于0.002,说明点云波动过大。
重投影像素误差:表示相机内参畸变系数,若重投影像素误差大于0.1,说明相机内参畸变系数过大。
旋转自由量:表示当前样本与已采集样本的旋转空间分布均匀情况,