
外观
场景物体使用指南
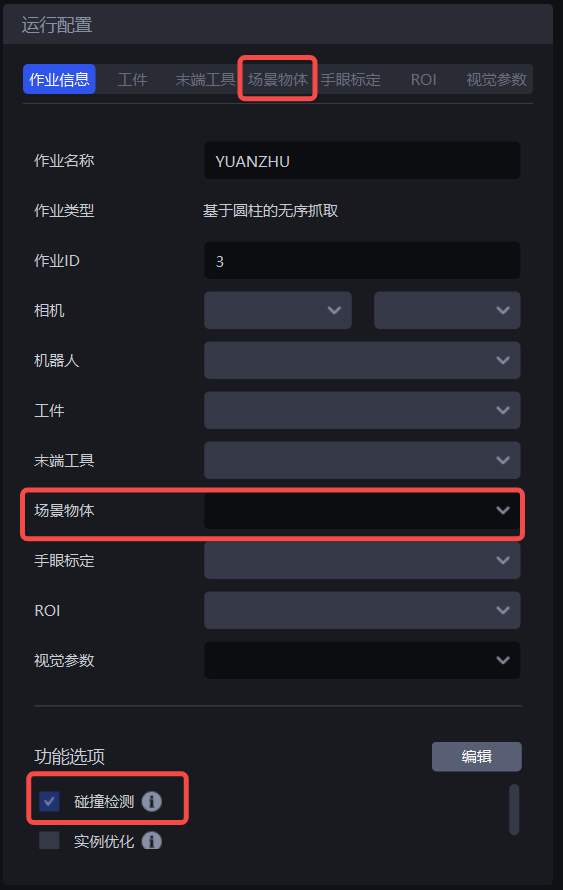
勾选功能选项碰撞检测后,新增了一项作业配置------场景物体,用于配置料框(包括不固定尺寸的多种料框)进行与夹具的碰撞检测。当使用一键联通训练视觉模型或双目成像模型时,需要上传料框的网格文件以生成料框数据。
一、新增修改删除场景物体
点击场景物体栏,如下图所示。

左键点击
+新增场景物体创建新的场景物体;左键点击具体的场景物体可打开场景物体界面修改信息;
右键点击具体的场景物体可选择删除对应的场景物体。
二、配置场景物体
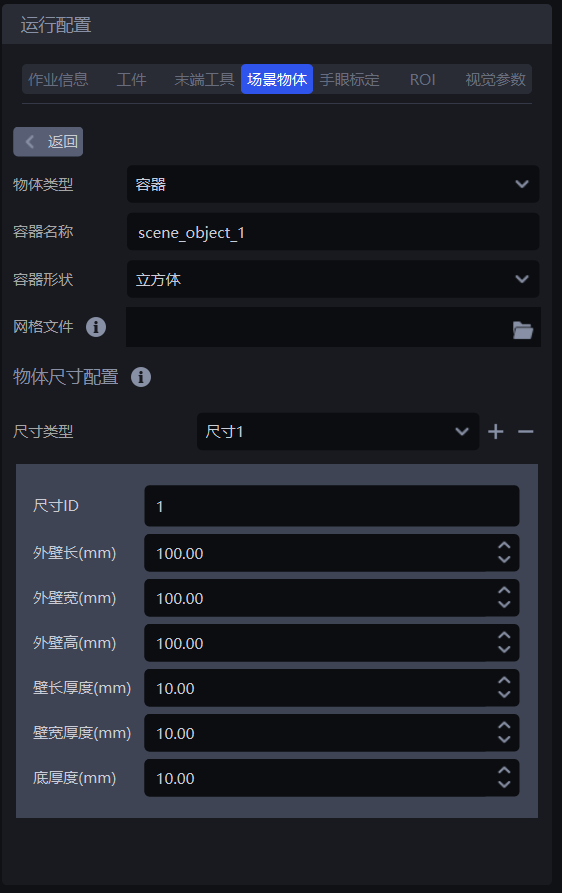
物体类型:场景物体类型,当前仅有容器一种类型容器名称:用于标识当前容器容器形状:当前仅有立方体一种形状网格文件:可选项。当来料存在料框,可上传料框的网格文件,使用一键联通训练视觉模型或双目成像模型时,在仿真环境中生成料框数据模拟来料方式,可增强对料框和料框内工件的识别。
仅无序抓取场景需上传网格文件
物体尺寸配置:配置料框的尺寸先验。料框检测时,根据尺寸先验拟合四边形得到料框的模板点云,与料框的场景点云进行精匹配得到最终姿态;若场景中存在多种尺寸的料框,可针对同一场景物体设置不同的尺寸先验,点击"+""-"可新增、删除尺寸先验,如下图所示。
尺寸ID:用于标识当前尺寸先验配置,机器人输出 料框尺寸ID 时会使用当前尺寸id外壁长:容器外壁长度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第一位外壁宽:容器外壁宽度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第二位外壁高:容器外壁高度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第三位壁长厚度:容器长边壁厚度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第四位壁宽厚度:容器宽边壁厚度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第五位底厚度:容器底部壁厚度,单位 mm,机器人输出 料框尺寸(长,宽,高,长边厚度,宽边厚度,底厚度) 时会使用该配置作为第六位

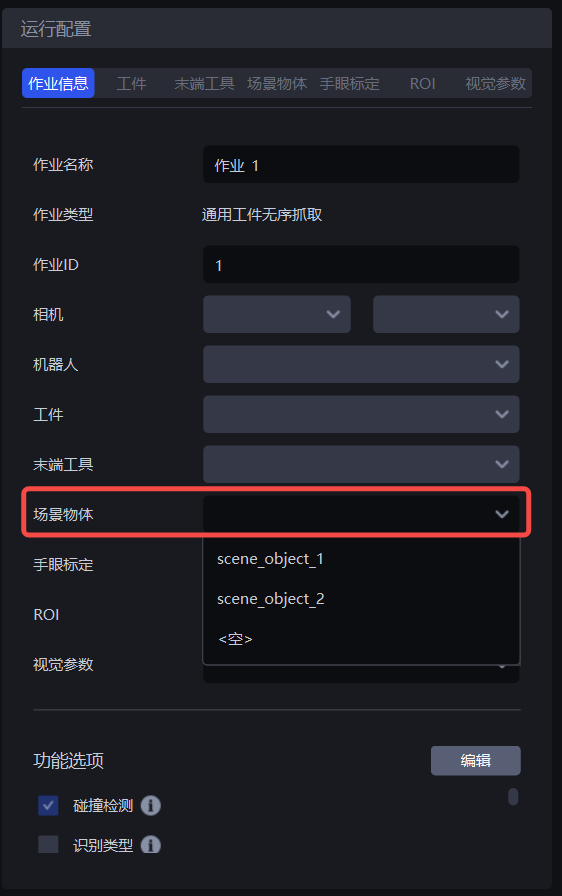
三、选择场景物体
配置好场景物体后,在作业信息的场景物体下拉框选择当前作业绑定的场景物体。
四、机器人相关指令
在PickWiz发送至机器人指令中,在成功匹配且检测无异常时可以配置获取料框匹配的信息
| 信息 | 占位符 | 功能 |
|---|---|---|
| 场景物体尺寸ID | so_size_id | 匹配的料框尺寸先验ID(与配置内容一致),长度为1 ,未匹配值为-1 |
| 场景物体尺寸 | so_size | 匹配的料框尺寸先验(与配置内容一致),长度为6 [外壁长,外壁宽,外壁高,壁长厚度,壁宽厚度,底厚度],未匹配值为[0,0,0,0,0,0] |
| 场景物体位姿 | so_pose | 匹配的场景物体位姿,长度为6[x,y,z,a,b,c],未匹配值为[0,0,0,0,0,0] |