外观
日志说明
1. 日志存储位置
(1)PickWiz V1.6.0 之前版本的日志存储位置
~/kuawei_data/log/middleware/middleware.log 后端除检测流程外的一些系统日志 ~/kuawei_data/log/backend/backend.log 后端检测流程日志 ~/kuawei_data/log/PickLightMicroServer/PickLight_deepmodel.log 模型推理服务日志 ~/kuawei_data/log/glia/glia.log glia日志 ~/kuawei_data/log/rlia/rlia.log rlia日志 ~/.dexforce/log/pickwiz/app.*.log PickWiz前端日志
(2)PickWiz V1.6.0 之后版本的日志存储位置
~/.dexforce/log/picklight/backend_sys/backend_sys.log 原middleware.log ~/.dexforce/log/picklight/backend_pipe/backend_pipe.log 原backend.log ~/.dexforce/log/picklight/backend_deepmodel/backend_deepmodel.log 原PickLight_deepmodel.log ~/.dexforce/log/glia/glia.log glia日志 ~/.dexforce/log/rlia/rlia.lAog rlia日志 ~/.dexforce/log/pickwiz/app.*.log PickWiz前端日志
(3)PickWiz 1.7.1 之后版本的日志存储位置
~/.dexforce/log/pickwiz/PickWiz_INFO_年月日-时分秒.进程ID PickWiz前端日志
2. 日志功能介绍
| 字段 | 说明 |
|---|---|
| 时间 | 日志生成的时间,PickWiz 支持实时查看日志。 |
| 等级 | 日志内容的等级,DEBUG表示全部的日志信息,包含详细的调试信息,用于排查问题;INFO表示系统常规运行的日志,包含运行过程、报警信息和报错信息;WARNING表示报警信息,包含报警信息和报错信息;ERROR表示报错信息。可在底部等级筛选日志内容。 |
| 内容 | 日志的具体内容 |
| 清空 | 清空当前界面上展示的所有日志。日志存储文件不会清空,若需查看已清空的日志,可参照 1. 日志存储位置 打开对应的日志存储文件。 |
| 复制 | 键盘Ctrl+C/Ctrl+V 或 鼠标右键点击复制,可复制日志信息,如下图所示。 |
| 搜索 | 日志搜索框输入信息,点击 搜索🔍 图标可搜索日志中对应的信息,并且可以上下快速逐条显示。 |
3. 日志内容
3.1 数据来源
日志开头写明了输入到工作流中的数据来源。
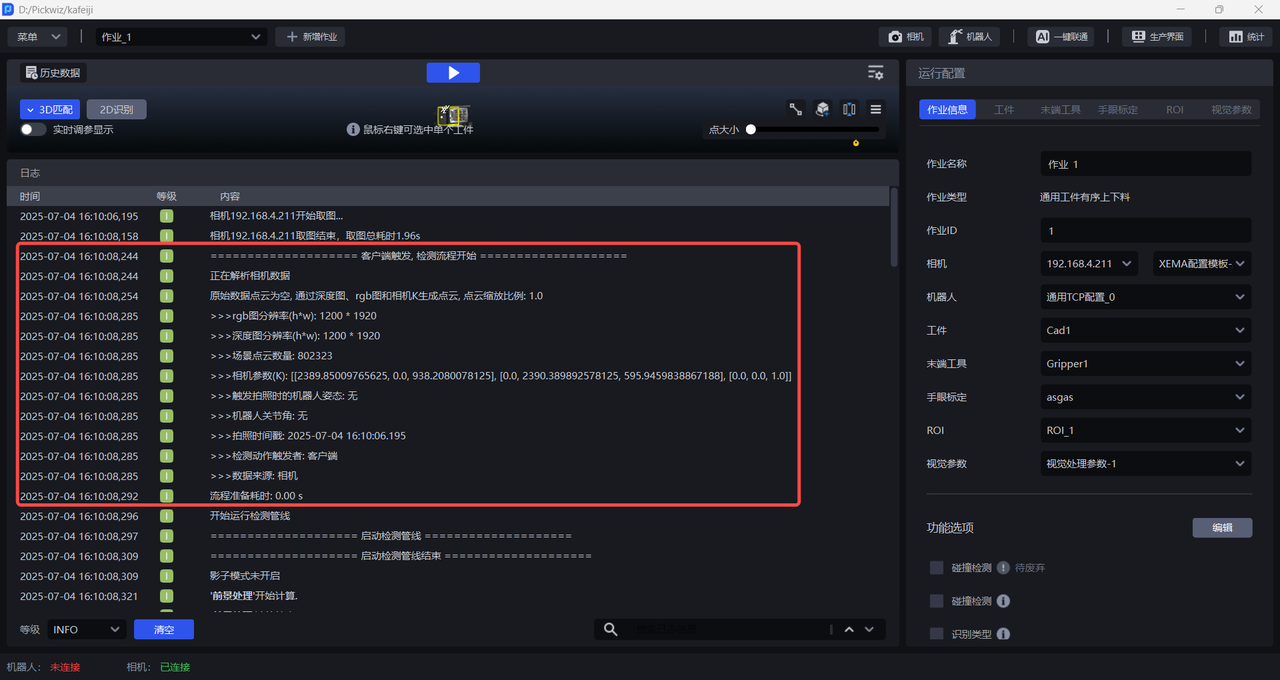
若视觉计算配置-数据来源选择了相机数据,则需要连接相机,PickWiz 会向相机发送拍照取图指令,相机将实时采集2D图、深度图并生成点云图。
如下图所示,相机首次连接成功后,会先进行网络测速,再进行实际的拍照取图,实际拍照取图耗时1.94 s。拍照完成后解析实时采集的相机数据,包括以下参数。
rgb图分辨率:2D图的大小,计算方式是h(长度)* w(宽度),单位是像素;
深度图分辨率:深度图的分辨率,计算方式是h(长度)* w(宽度),单位是像素;
场景点云数量:根据2D图、深度图和相机内参,生成场景点云,输入到工作流中;
相机参数:即相机内参;
触发拍照时的机器人姿态:机器人末端工具的位姿;
机器人关节角:机器人姿态的表示方式,一般用欧拉角表示,在机器人配置中进行选择;
还有拍照时间戳:开始拍照取图的时间;
检测动作触发者:若是 PickWiz 触发的检测流程,则是客户端,若是机器人触发的检测流程,则是机器人;
数据来源:相机数据或历史数据,关于数据来源的说明请参照 视觉计算配置操作指南

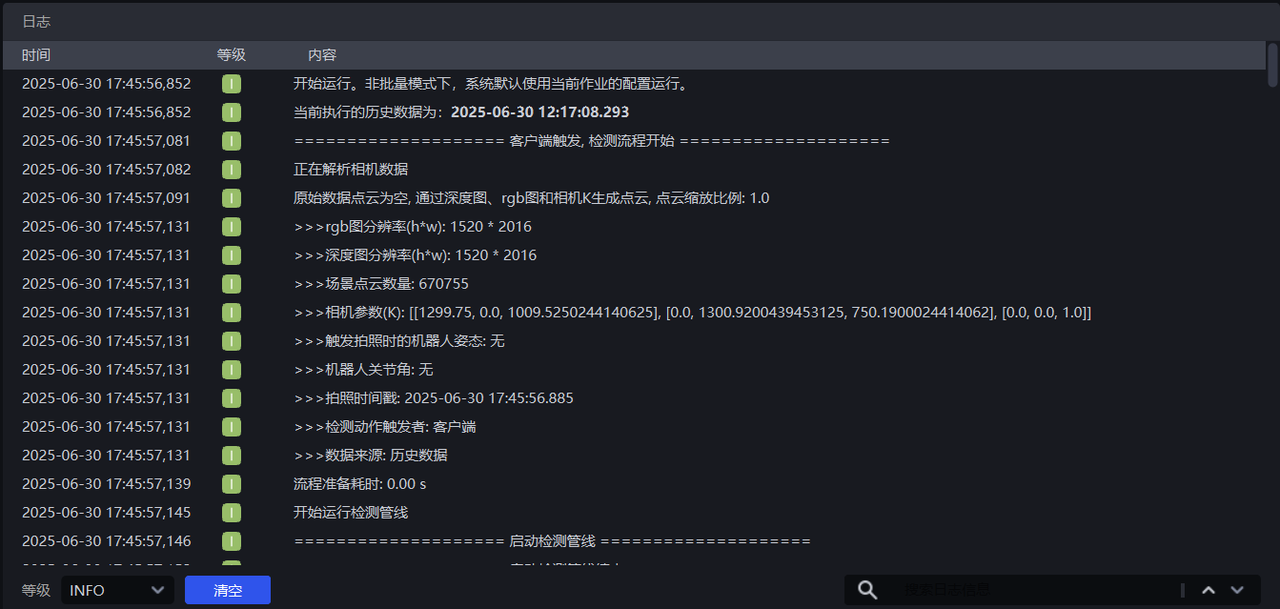
若视觉计算配置-数据来源选择了历史数据,则不需要连接相机,直接解析历史数据保存的相机数据即可,该流程耗时为0,如下图所示。

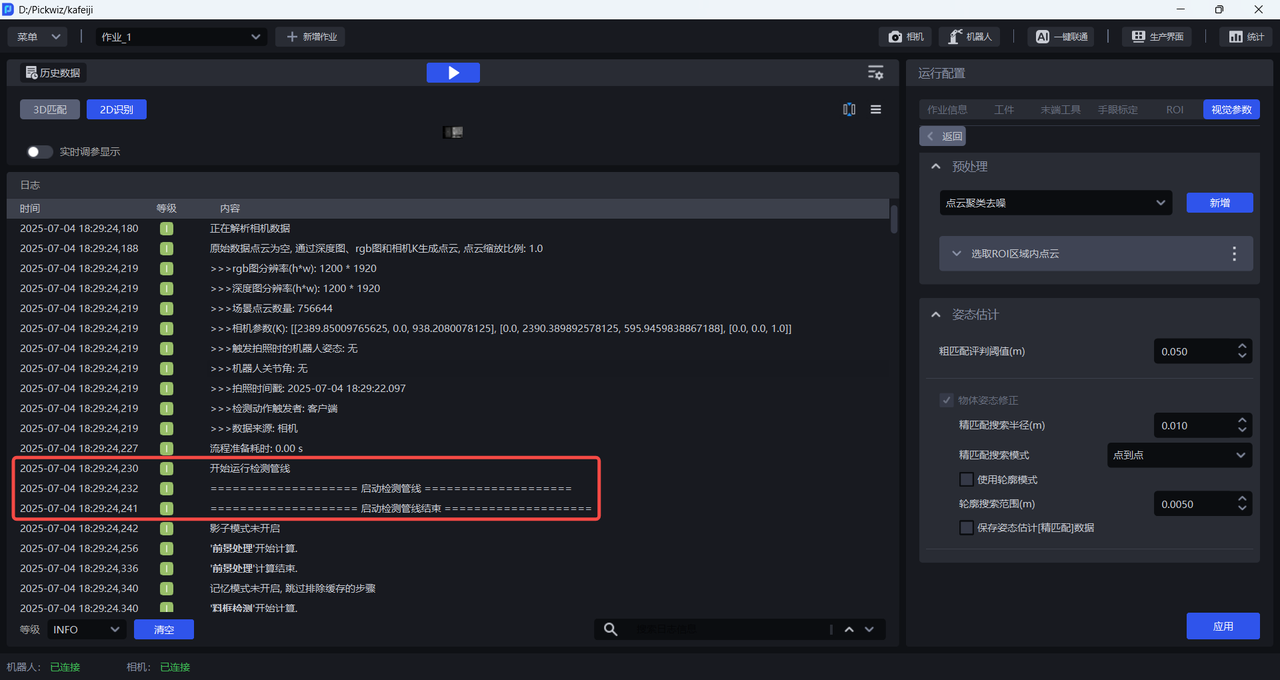
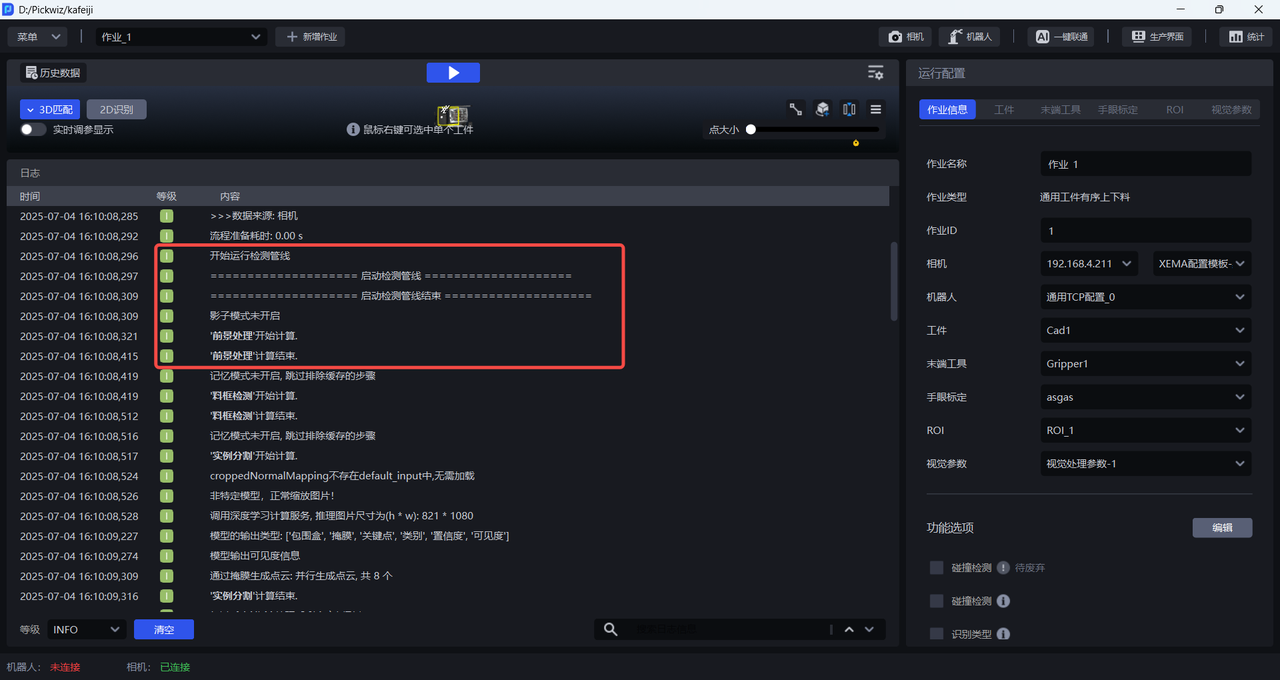
3.2 启动检测
数据解析后,启动检测管线
3.3 前景处理
前景处理是对输入到工作流中的相机数据进行预处理。若视觉参数-2D预处理增加了函数,则2D预处理函数在该节点对2D图、深度图、场景点云进行处理。
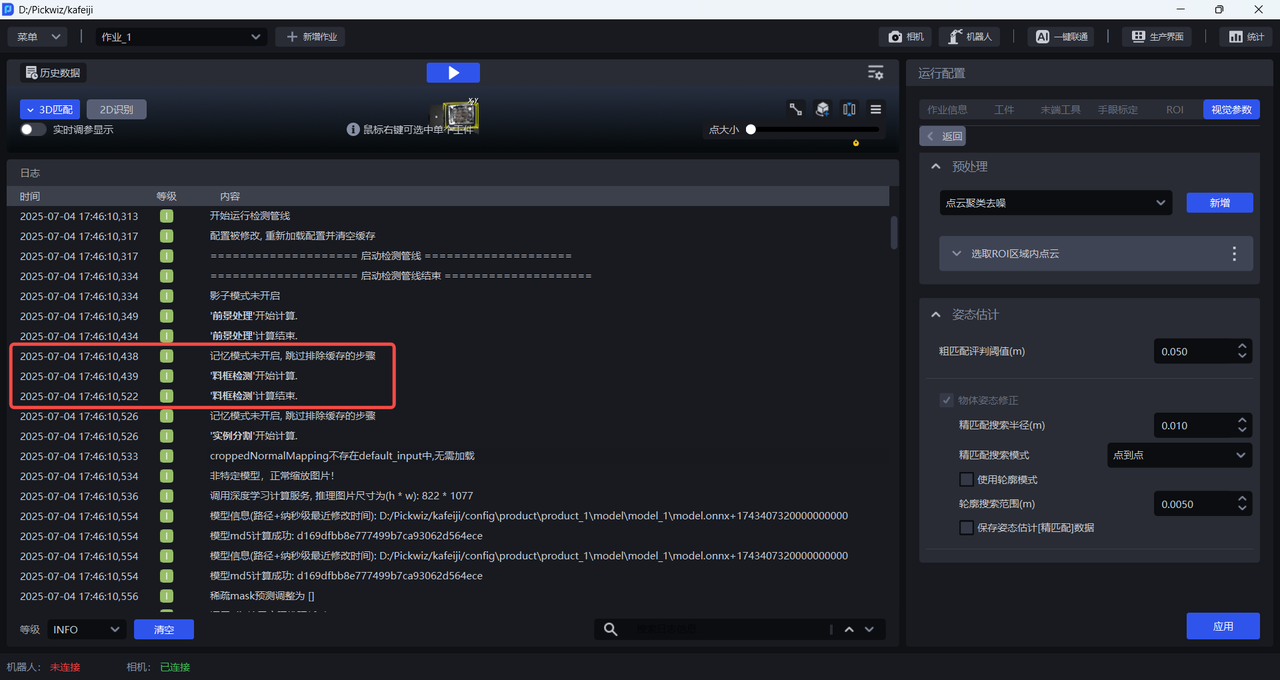
3.4 料框检测
若场景中有料框等场景物体,该节点将检测料框。
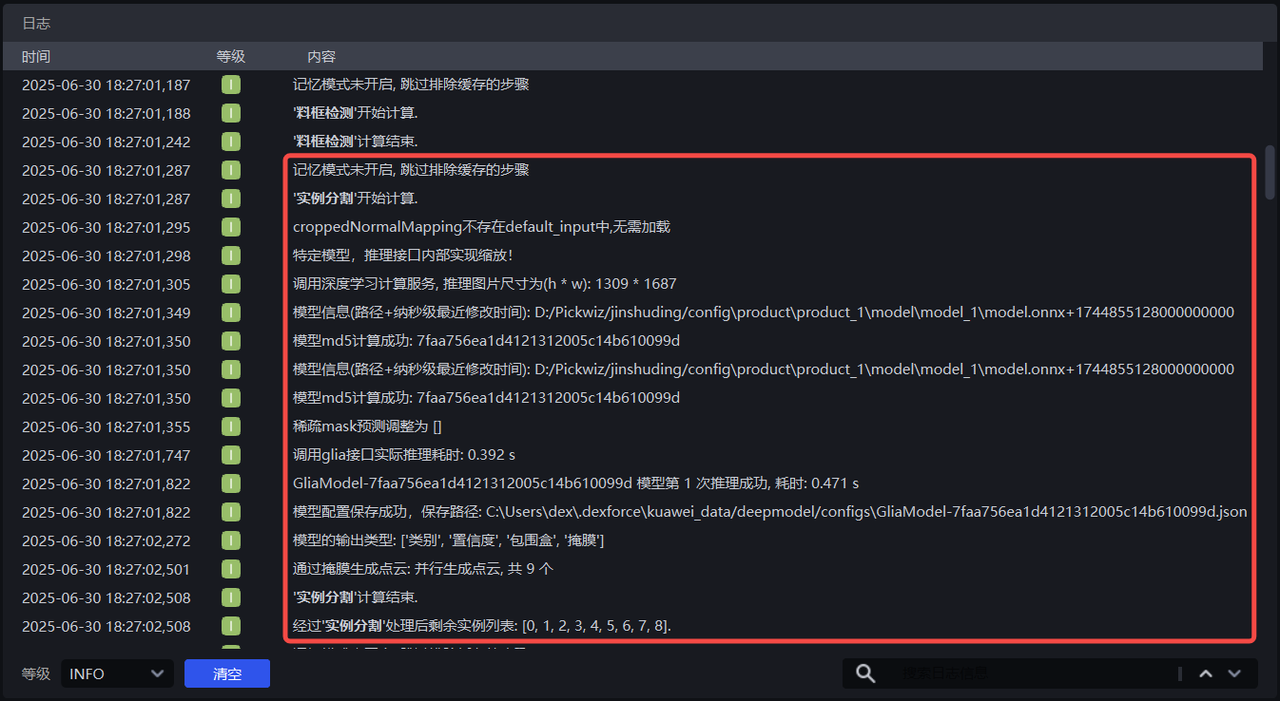
3.5 实例分割
实例分割是指从场景中分割出实例,与视觉参数-2D识别-实例分割对应。
如下图所示,从场景中分割出9个实例,并根据掩膜生成9个实例的点云。
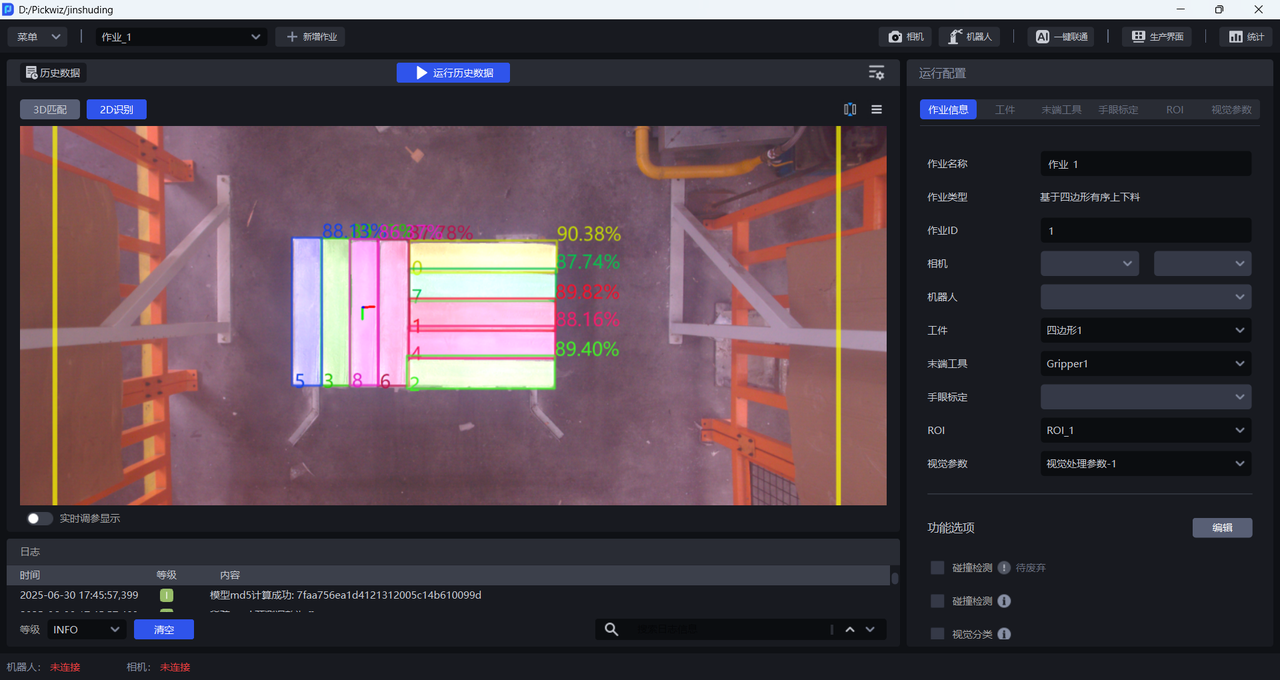
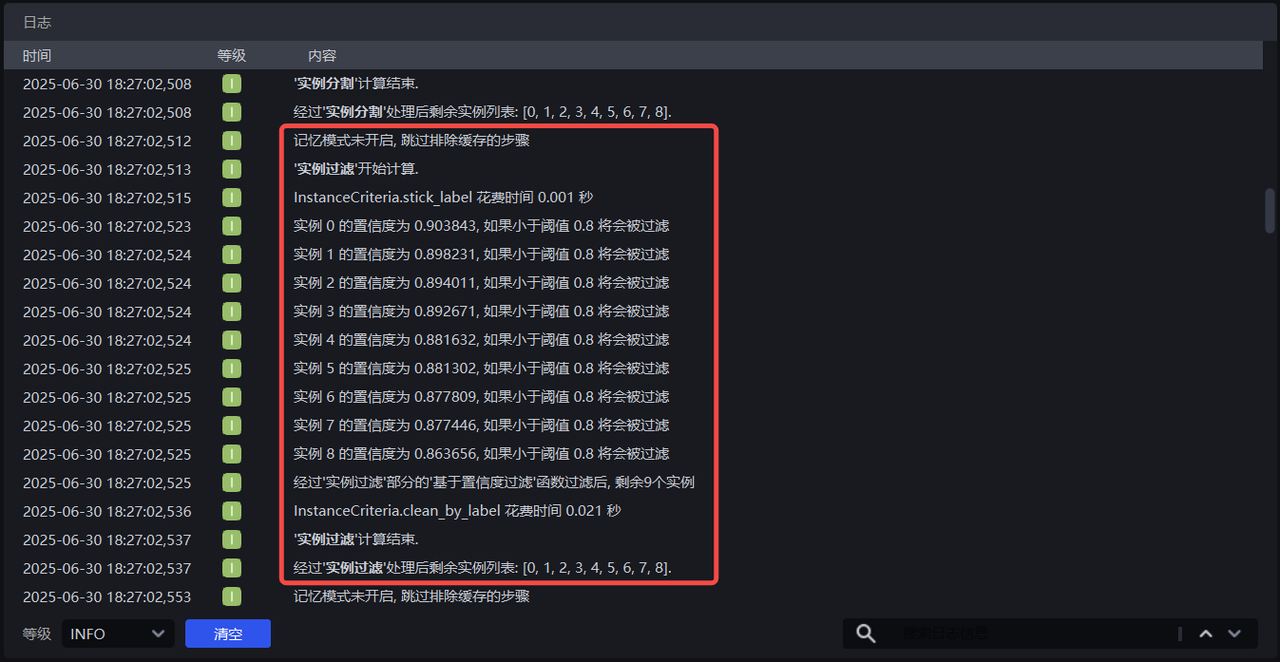
3.6 实例过滤
实例过滤是指对分割出的实例进行过滤,与视觉参数-2D识别-实例过滤对应。
如下图所示,实例的置信度小于0.8则会被过滤,9个实例的置信度均大于0.8,因此没有实例被过滤。
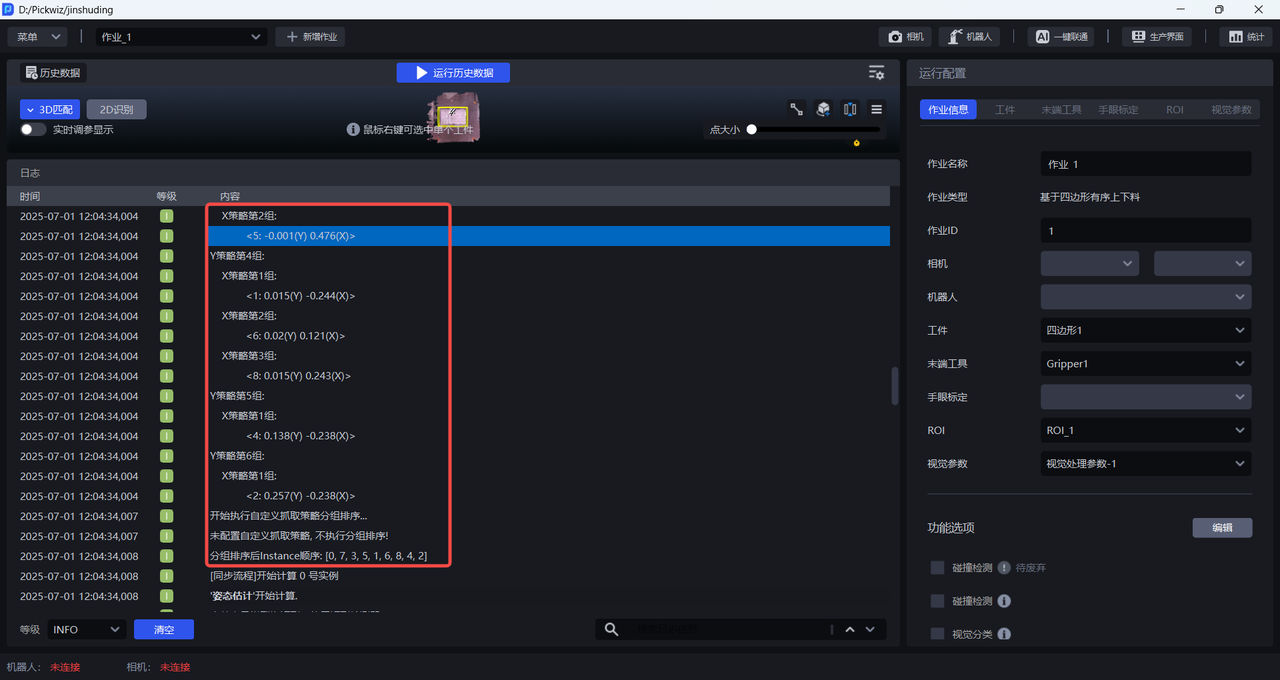
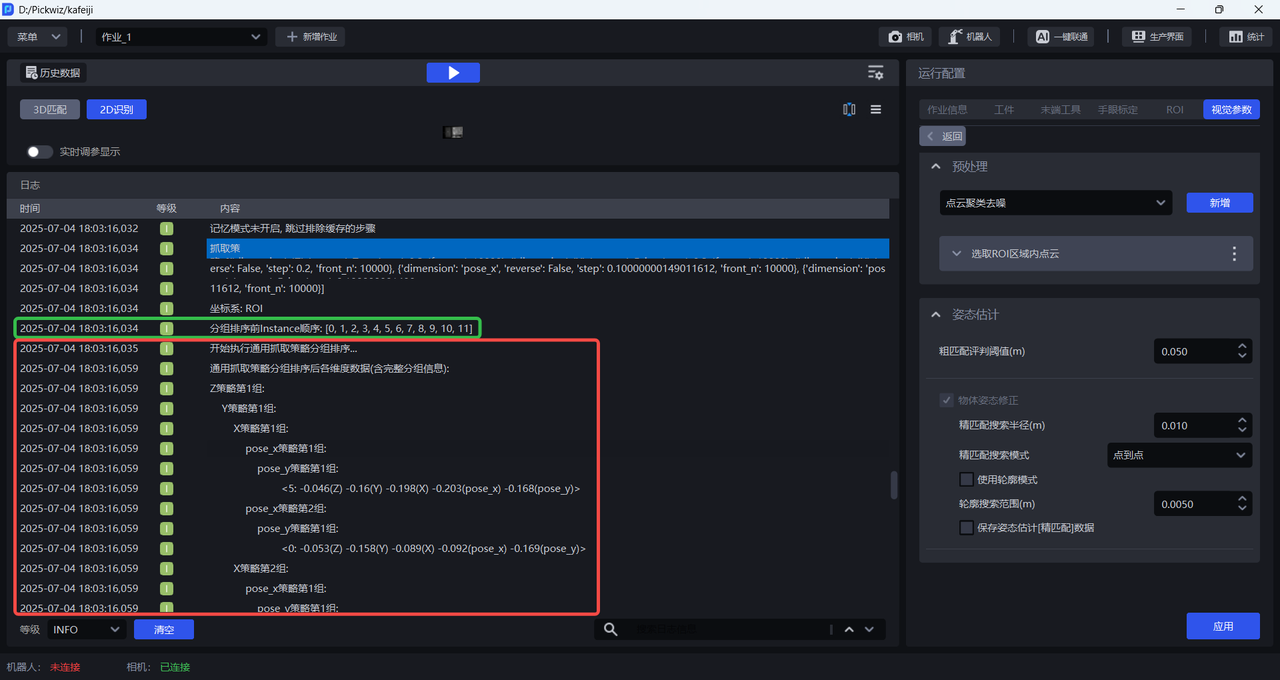
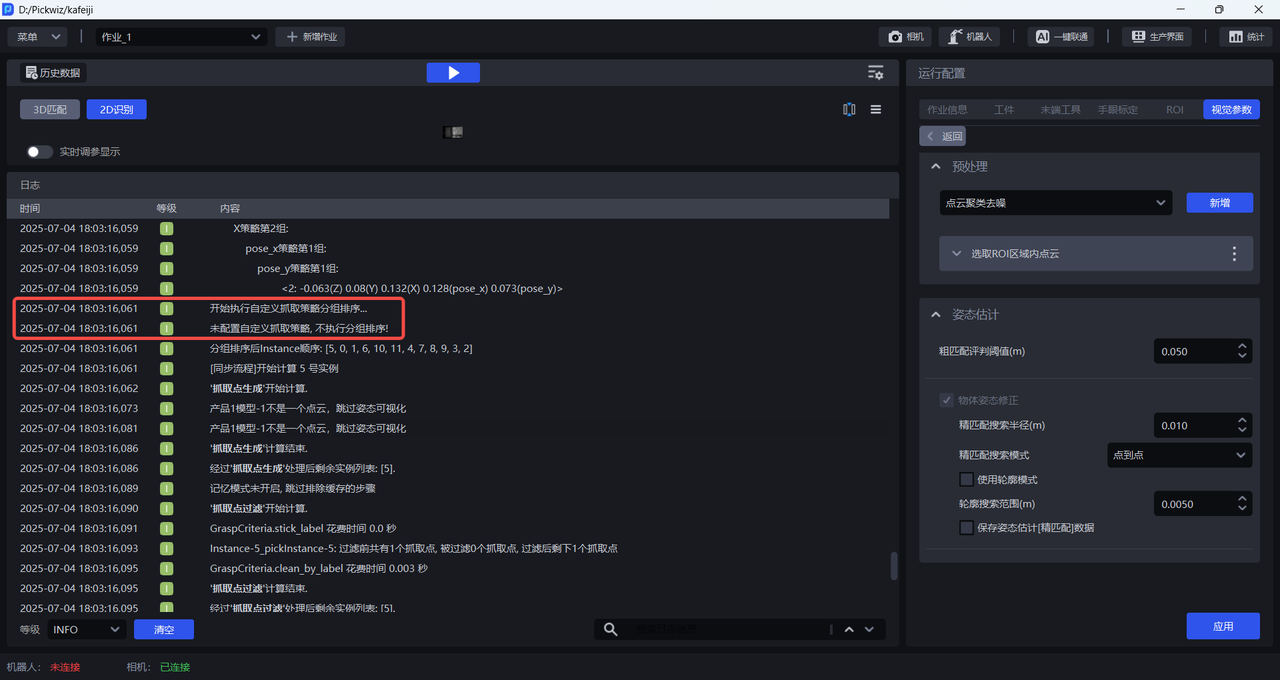
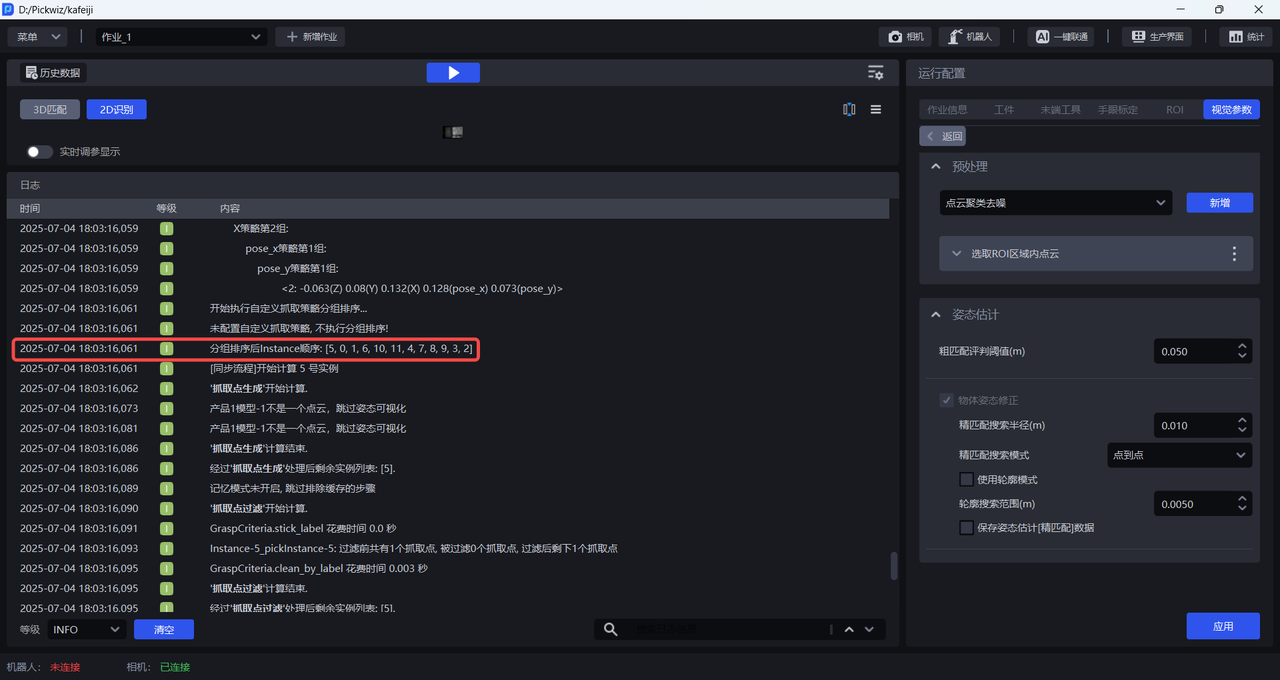
3.7 实例排序
实例排序是指对过滤后的实例进行分组排序,分组排序的方法与视觉参数-2D识别-实例排序对应。

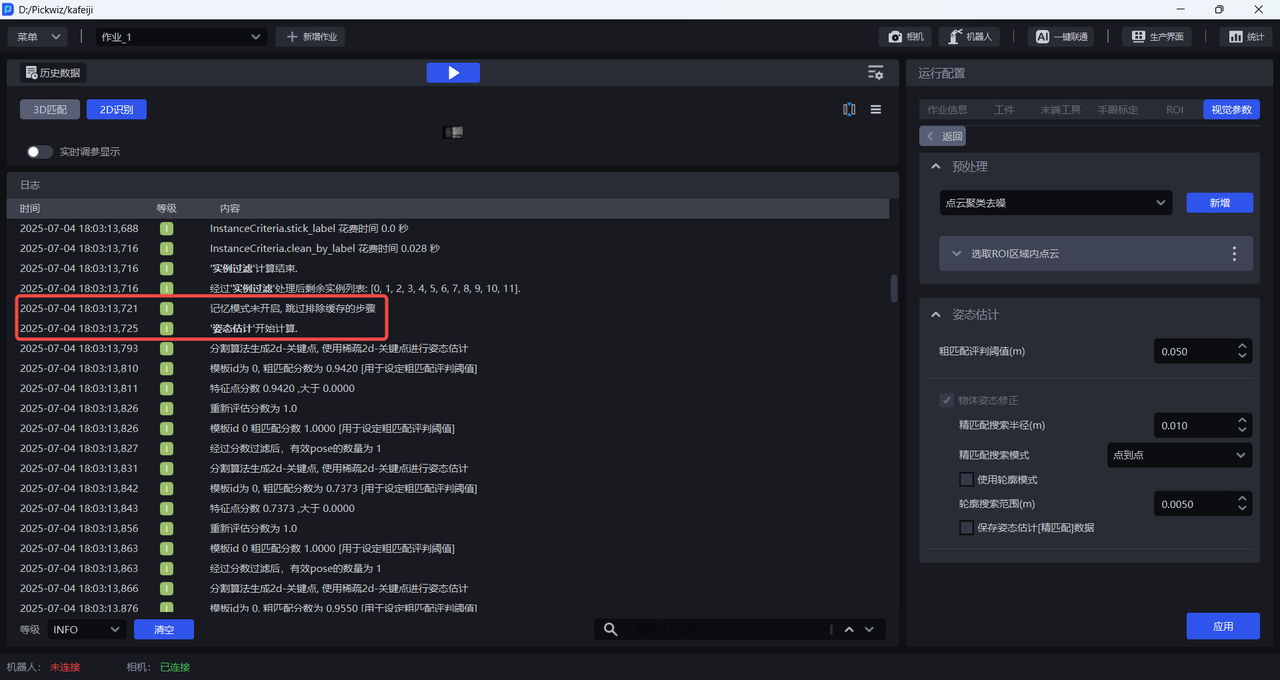
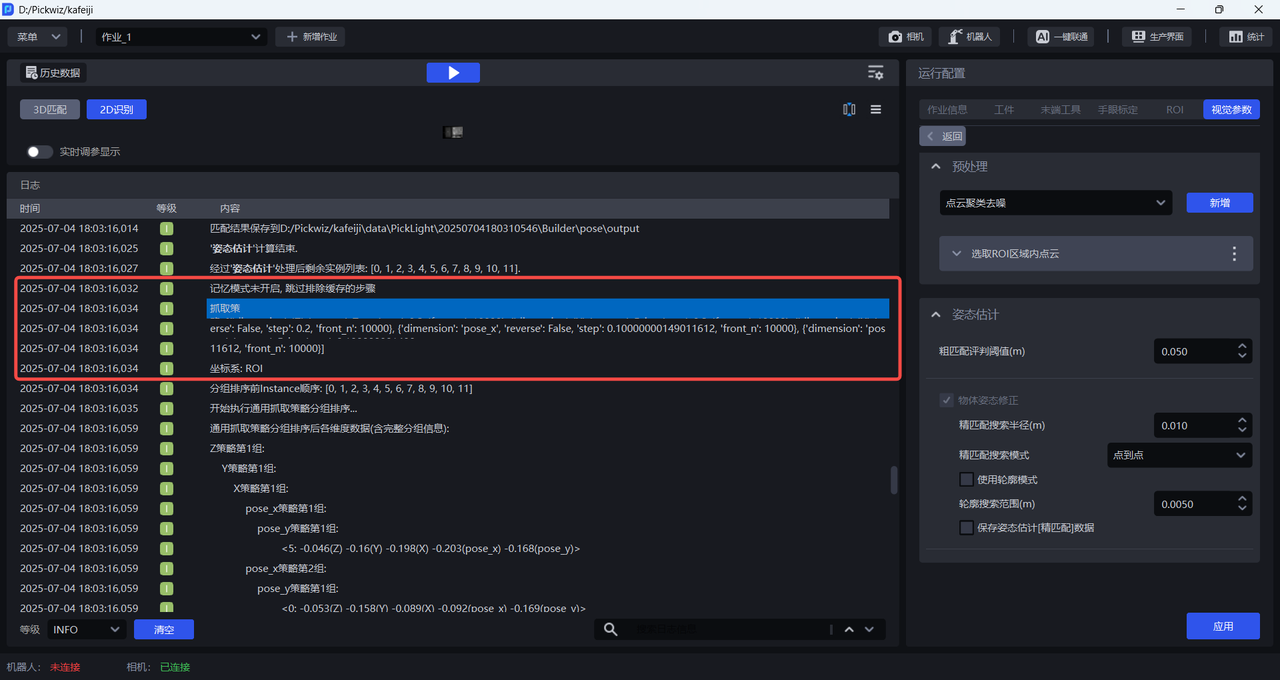
3.8 姿态估计
该节点写明了计算工件姿态的方法,与视觉参数-3D计算-姿态估计对应。
如下图所示,3D配准把场景点云与点云模板进行粗匹配和精匹配。
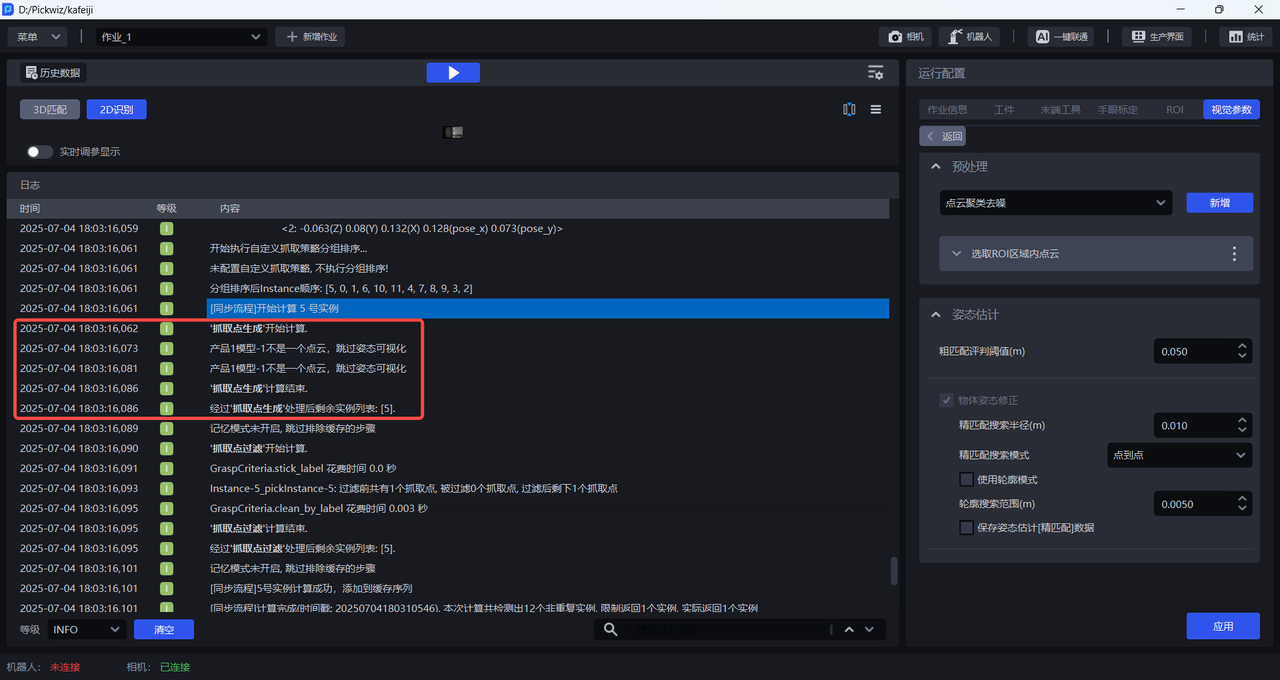
3.9 抓取点生成
该节点写明了抓取点生成方法,输入姿态估计结果,输出在每个实例上生成的抓取点。
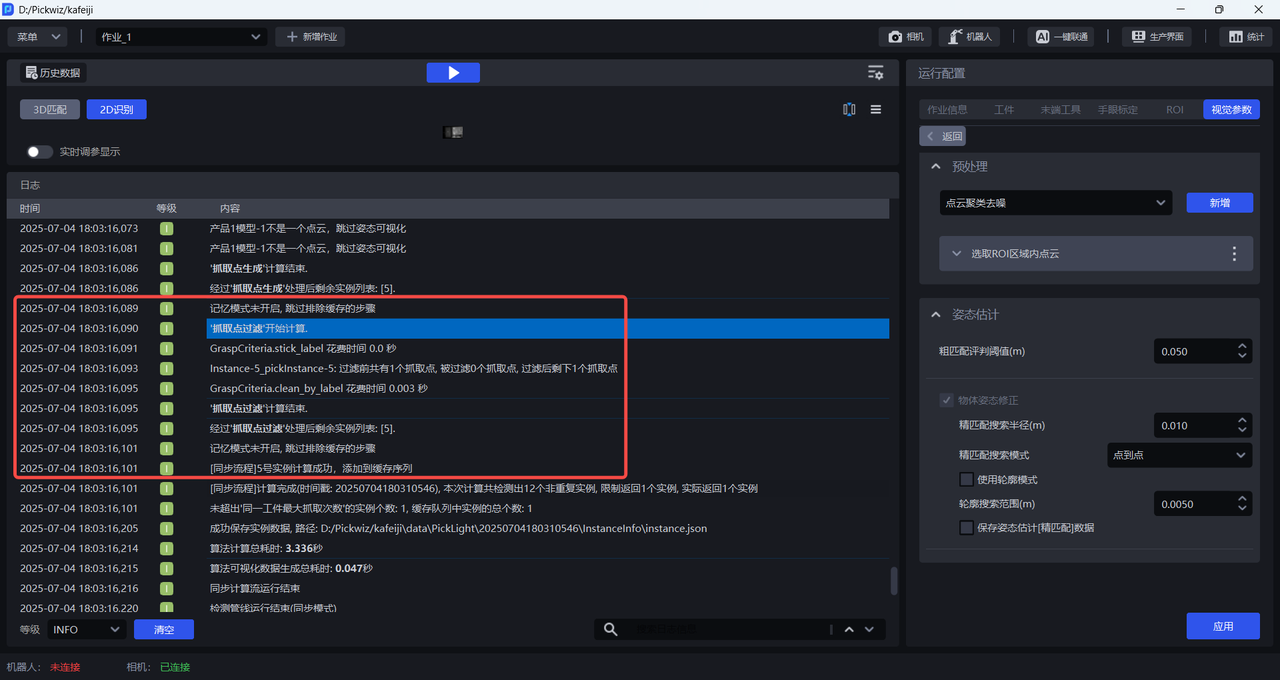
3.10 抓取点过滤
该节点写明了对抓取点进行过滤的方法,输入所有生成的抓取点,输出过滤后的抓取点,与视觉参数-抓取点处理-抓取点过滤对应。
3.11 抓取点排序
该节点写明了抓取点排序策略,输入姿态估计后生成的抓取点,输出分组排序后的抓取点,抓取时将按此顺序进行抓取,与视觉参数-抓取点处理-抓取点排序对应。
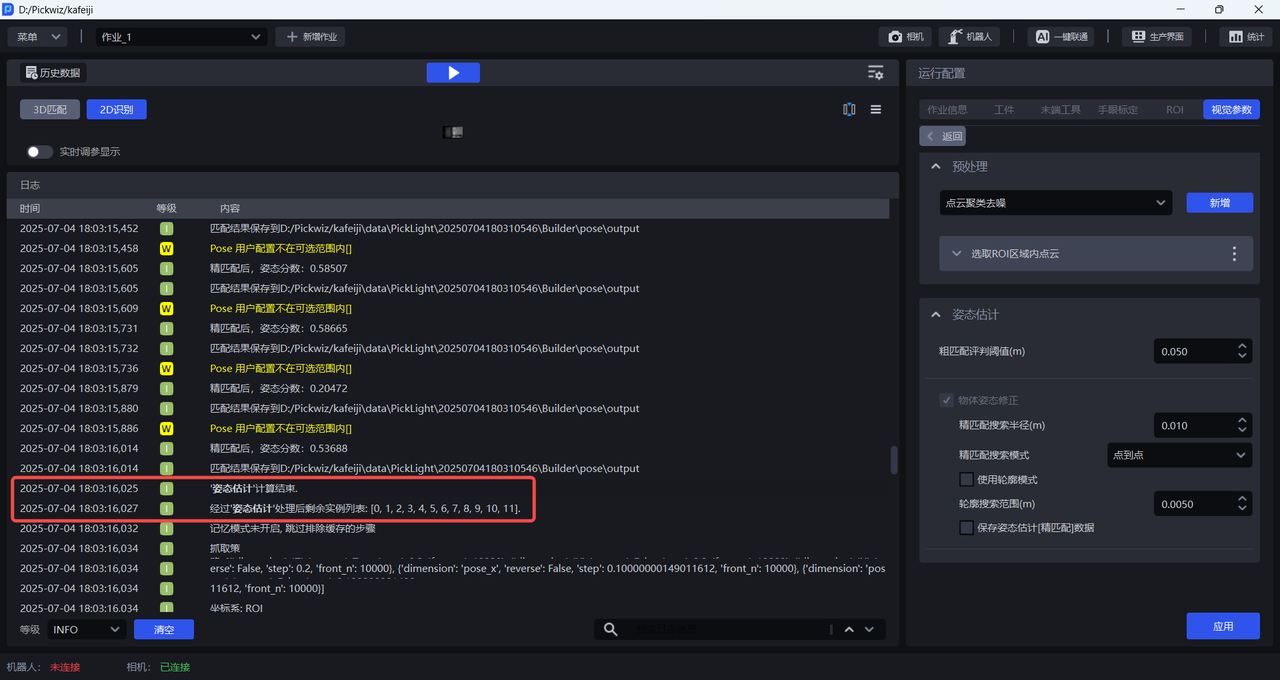
3.12 检测结束
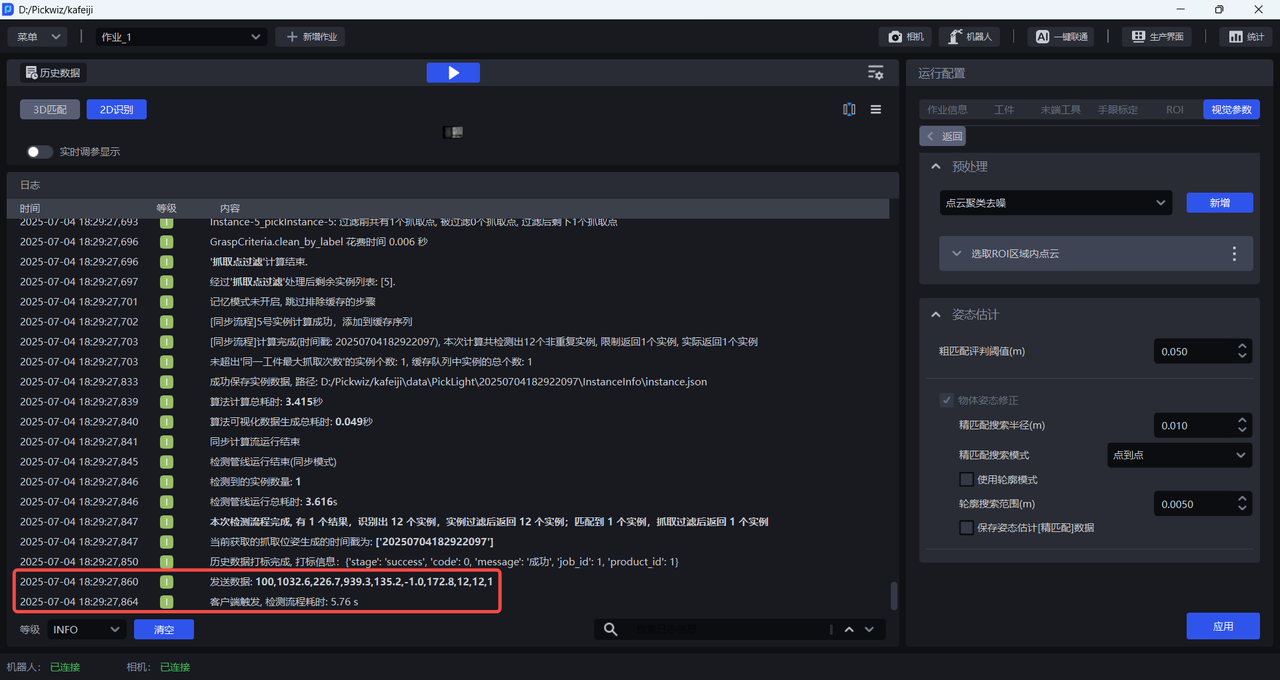
检测结束后,该节点写明了分割出的实例数量、实例过滤后返回的实例数量、姿态估计匹配到的实例数量、抓取点过滤后返回的实例数量,以及耗时情况。
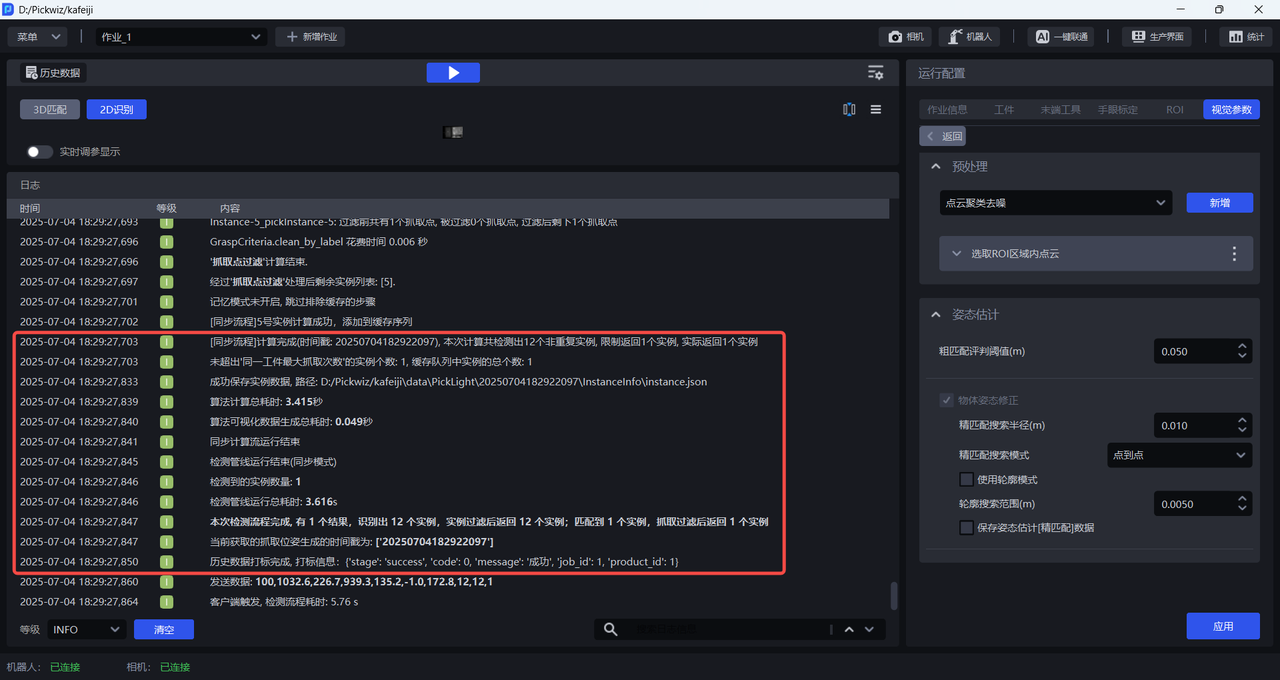
3.13 发送给机器人
PickWiz 将抓取点发送给机器人,若视觉计算配置-发送实例个数设置大于1,则每次发送多个实例的抓取点给机器人;若视觉计算配置-发送抓取点个数设置大于1,则每次发送一个实例的多个抓取点给机器人。