
外观
历史数据使用指南
历史数据是 Pickwiz 过去一段时间内的运行记录,保存了2D识别、3D计算、抓取点处理各个过程的输入数据和输出结果,用于回溯异常问题。
1. 查看历史数据
前置知识
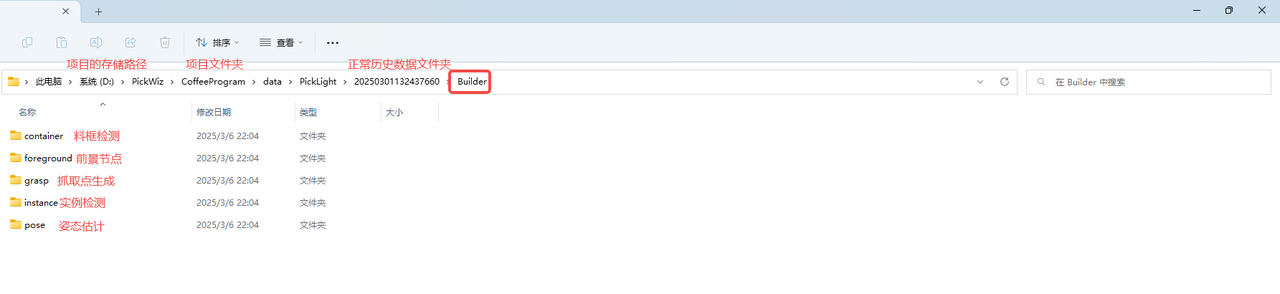
历史数据文件夹名称对应节点名称:
Builder - 生成相关节点
Criteria - 过滤相关节点
在主界面点击历史数据打开历史数据面板,可查看历史数据列表
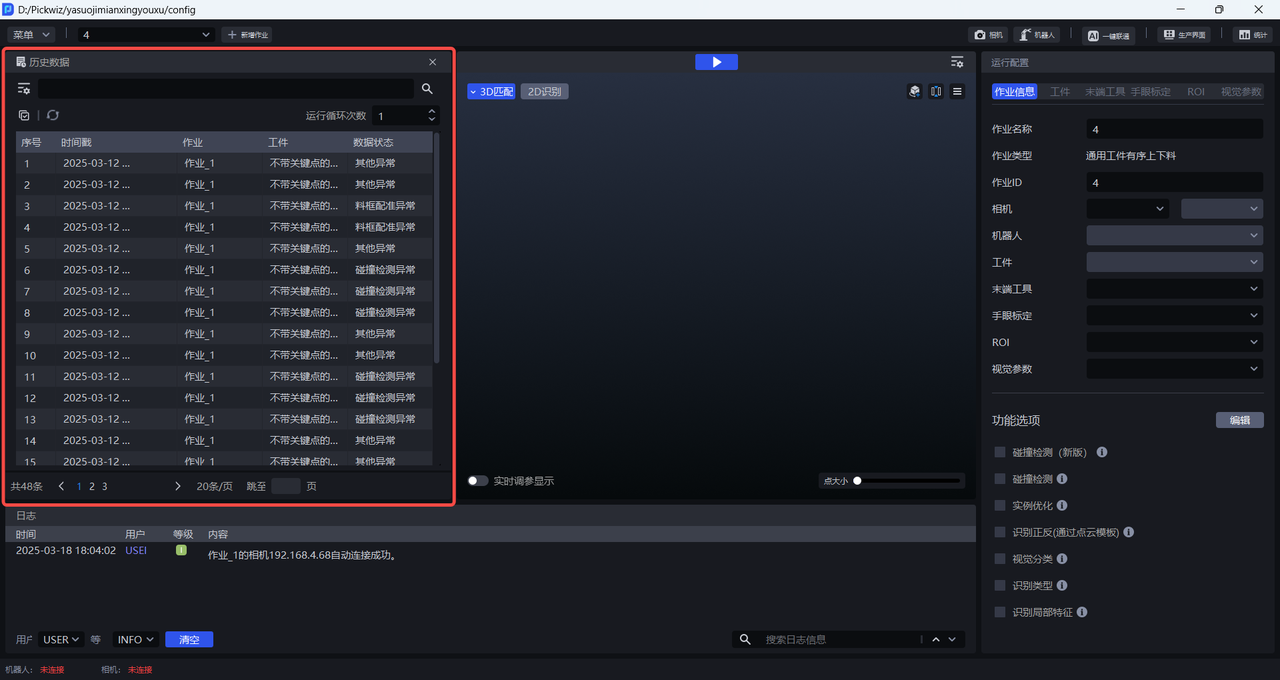
每条历史数据展示其时间戳、作业、工件、数据状态,时间戳即该条历史数据运行的时间,作业是该条历史数据的作业名称,工件是该条历史数据的工件名称,数据状态是该条历史数据的运行结果。
将鼠标光标悬置于每条历史数据的时间戳、作业、工件、数据状态上,可查看相应的全称。
点击"<"">"或填写"跳至 页"可翻页,查看列表下一页的历史数据。
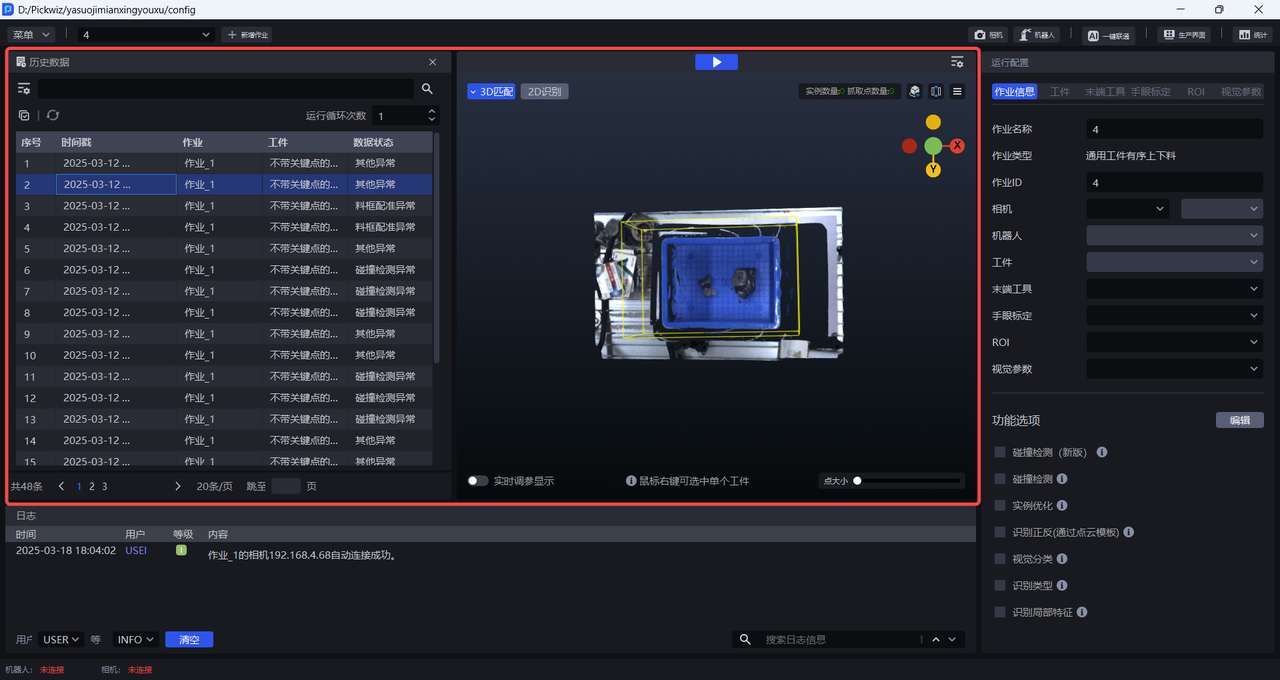
点击具体的历史数据,可在右侧可视化视窗查看历史数据的3D匹配结果和2D识别结果。
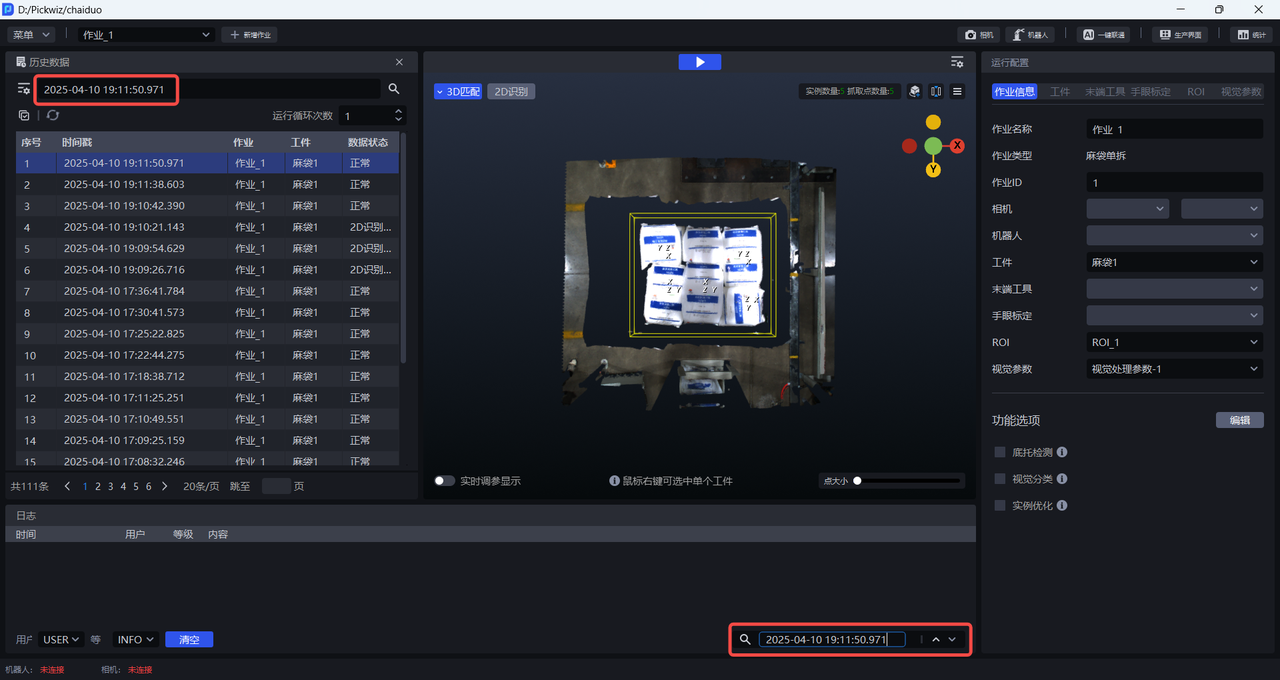
- 在历史数据的时间戳上鼠标右键单击,可复制历史数据的时间戳,在历史数据的搜索框或日志区的搜索框中粘贴,搜索对应的历史数据或日志。
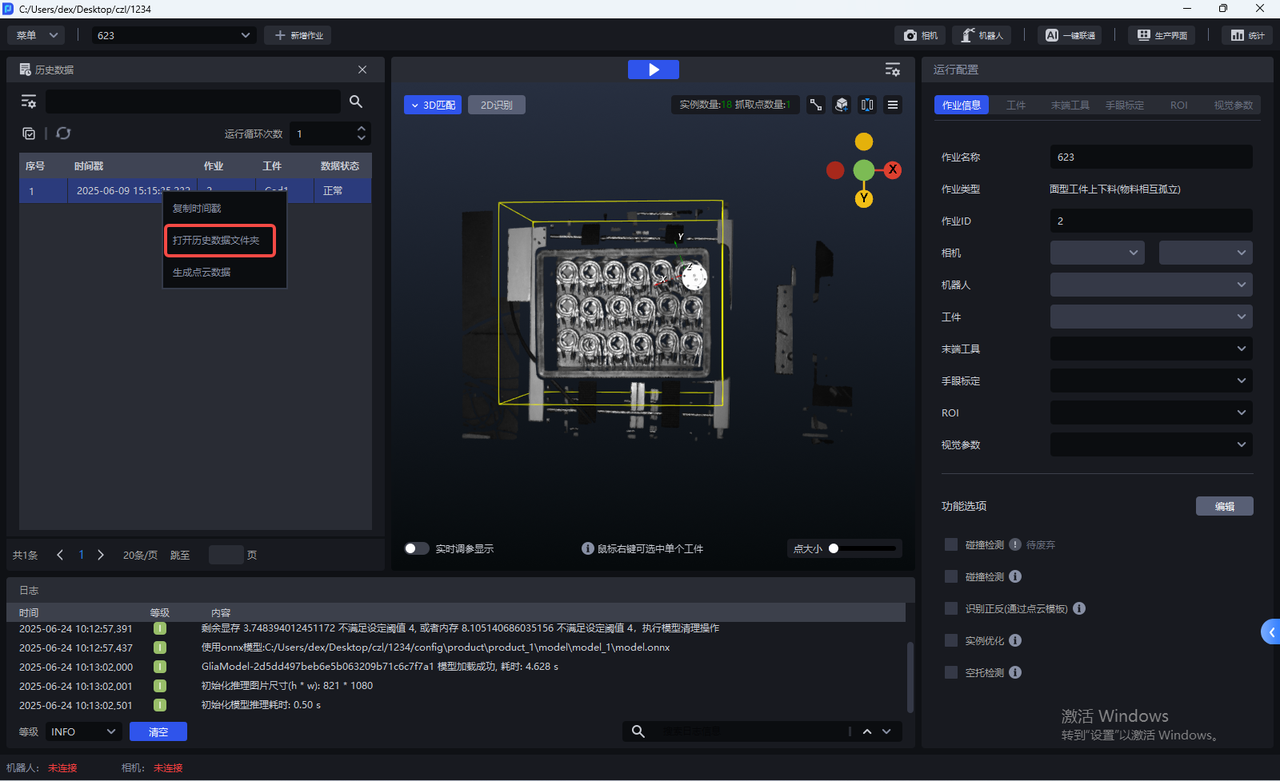
- 在历史数据的时间戳上鼠标右键单击,可打开该历史数据的文件夹。
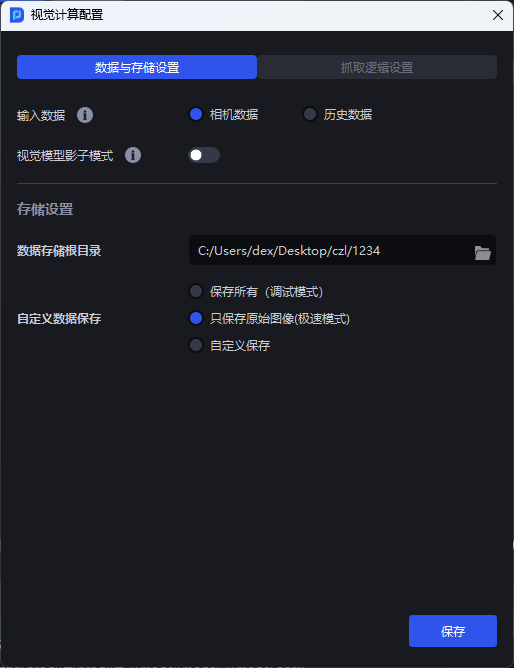
若视觉计算配置的自定义数据保存选择了只保存原始图像(极速模式),历史数据将不会保存点云数据,导致ROI区域和点云模板都无法调整,如下图所示。(ROI相关说明请参照 ROI 操作指南,点云模板相关说明请参照 点云模板制作指南)
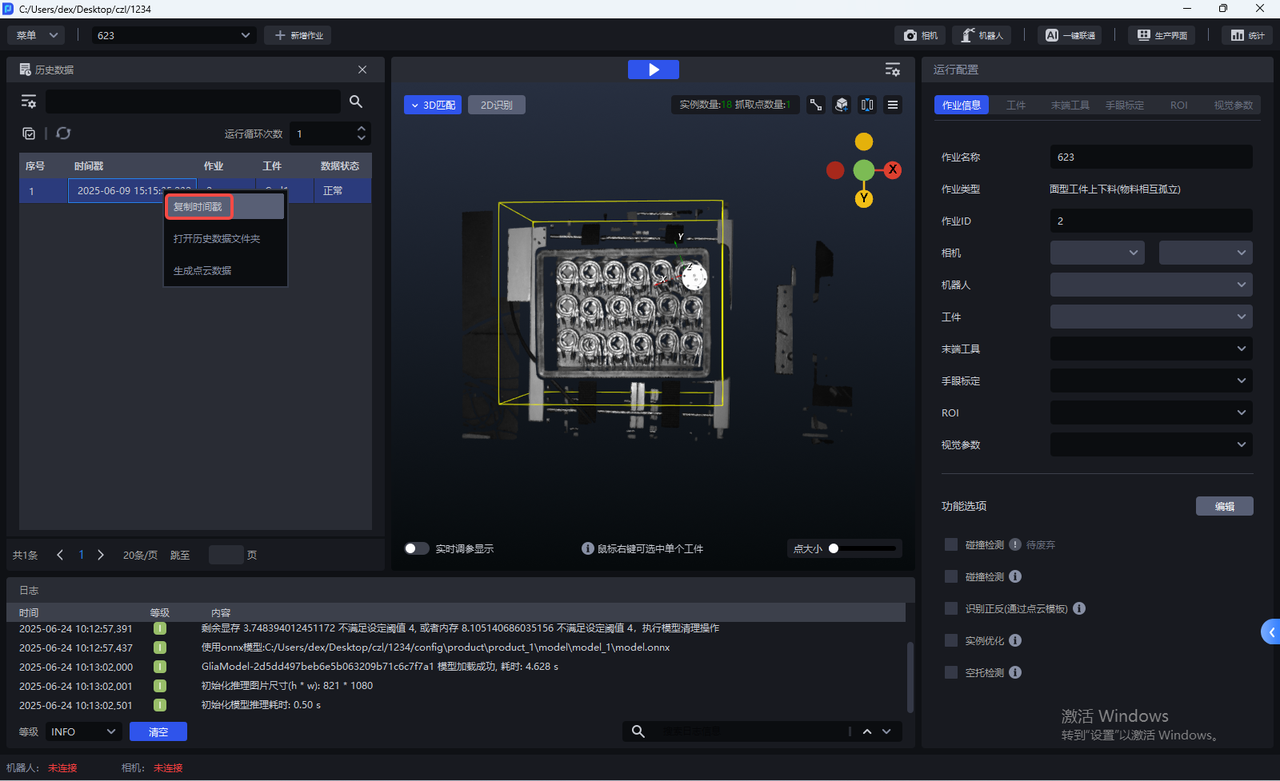
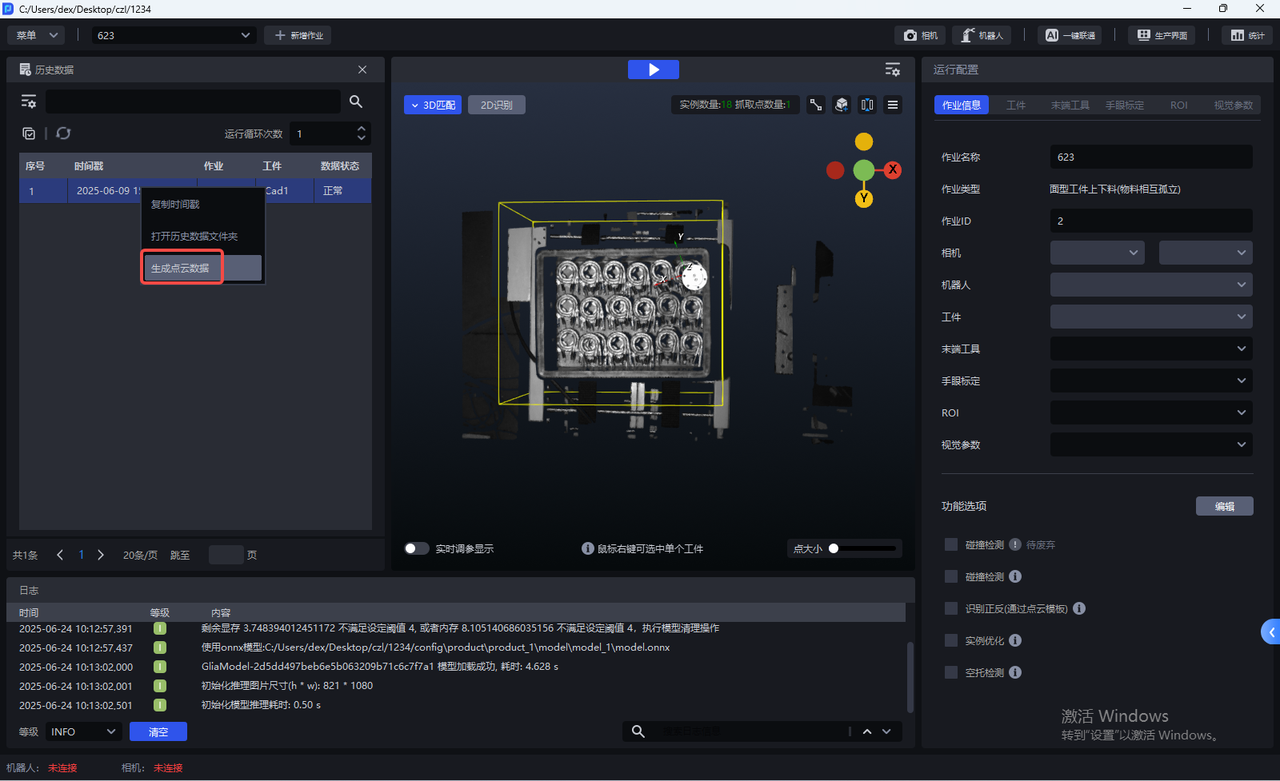
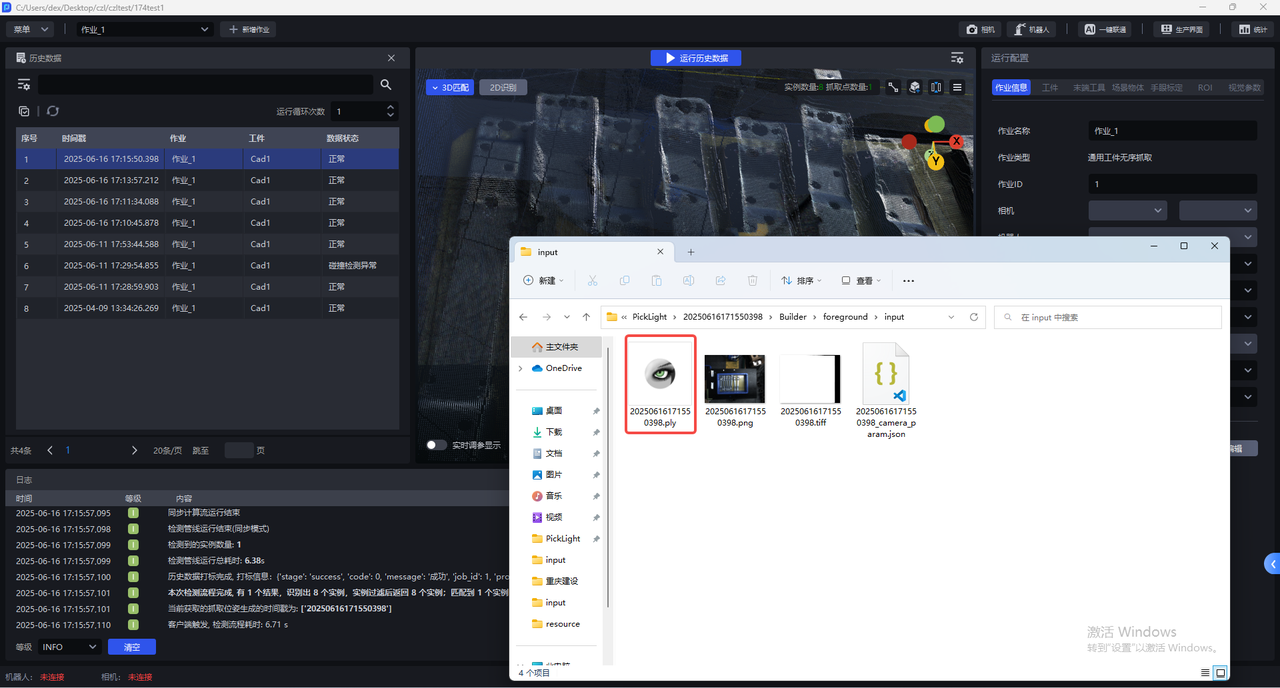
在相机被占用无法获取相机数据、只能使用历史数据生成点云的情况下,可鼠标右键点击历史数据的时间戳,再左键点击生成点云数据,系统会基于原始图像生成点云,并保存在对应历史数据的目录,如下图所示。
2. 搜索历史数据
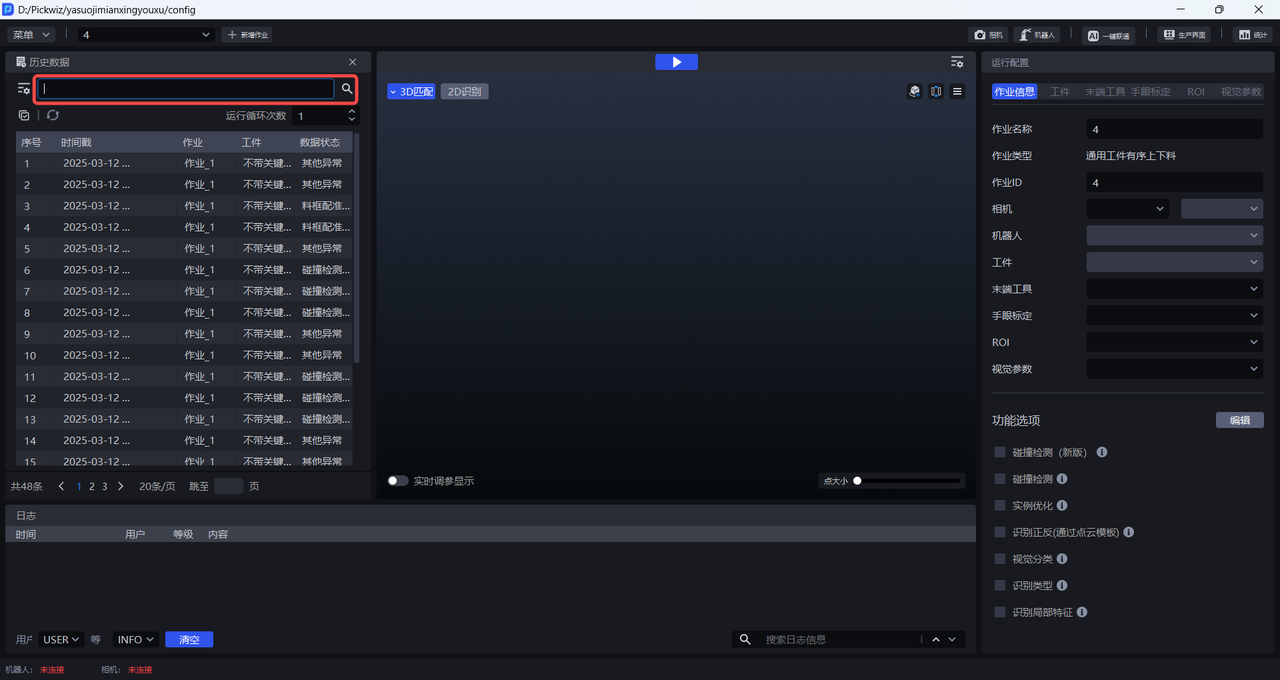
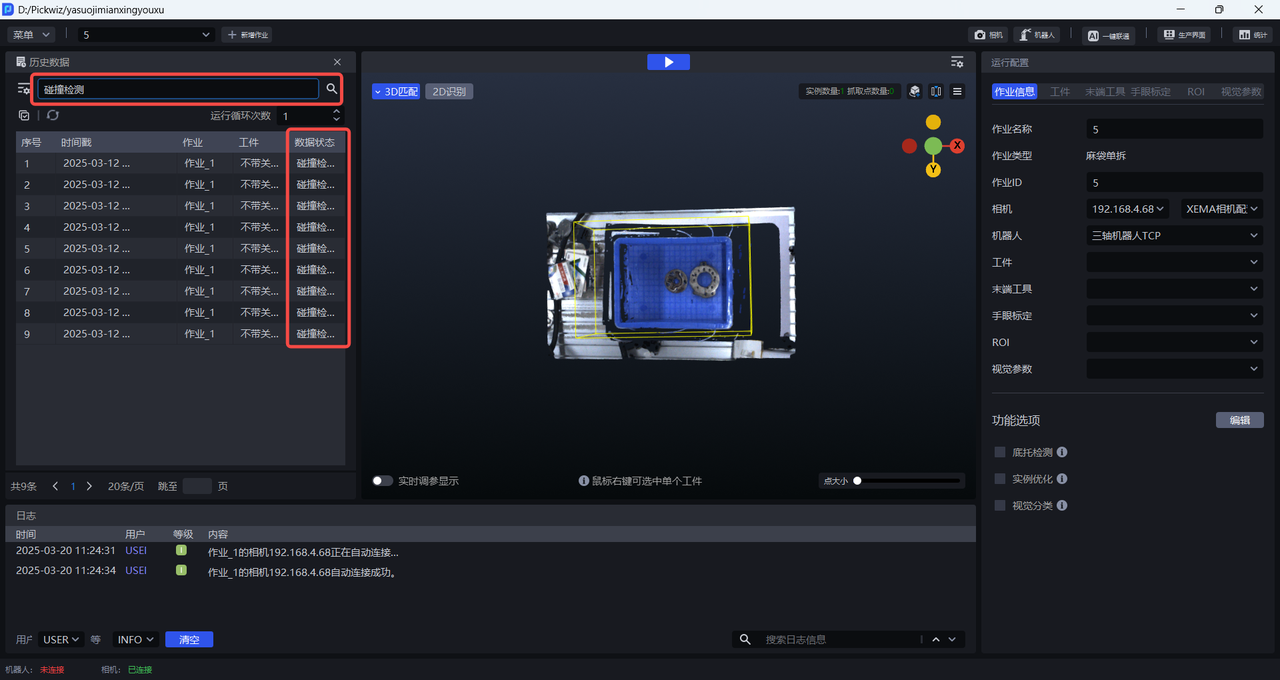
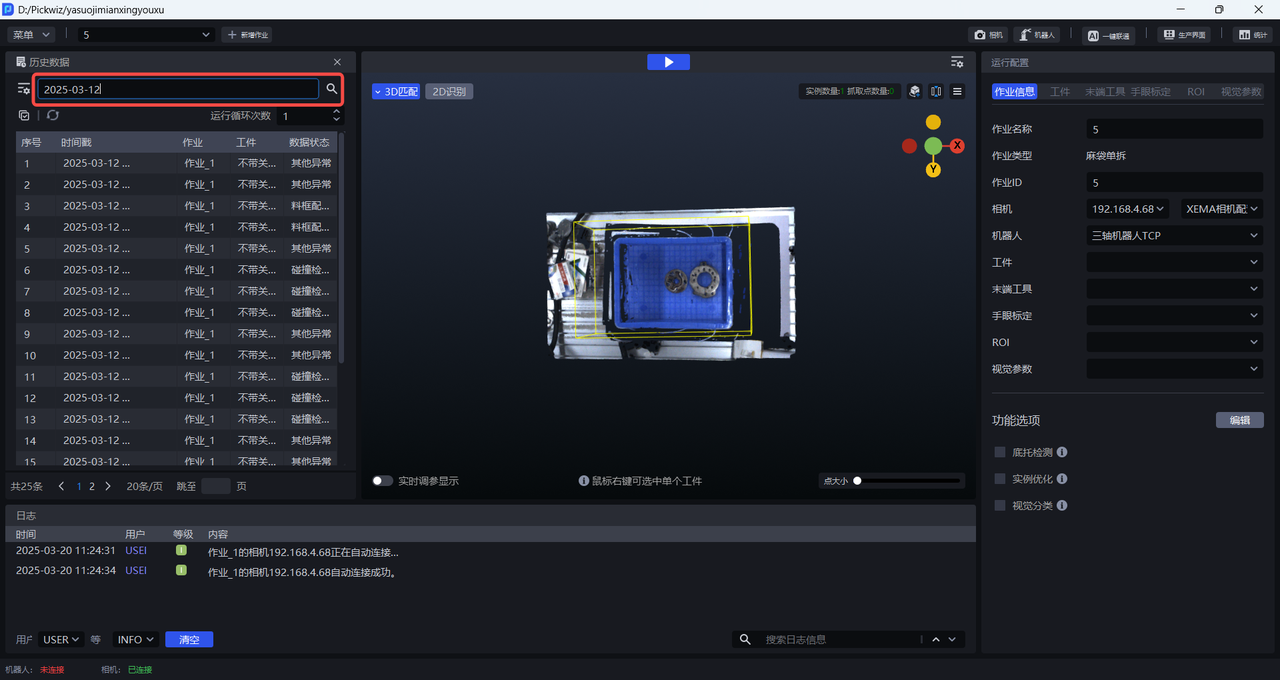
在历史数据面板的搜索框中输入时间戳、作业、工件、数据状态,可搜索出相应的历史数据。
输入异常的数据状态,如料框检测异常、2D识别错误等,可筛选出历史数据中的异常情况。
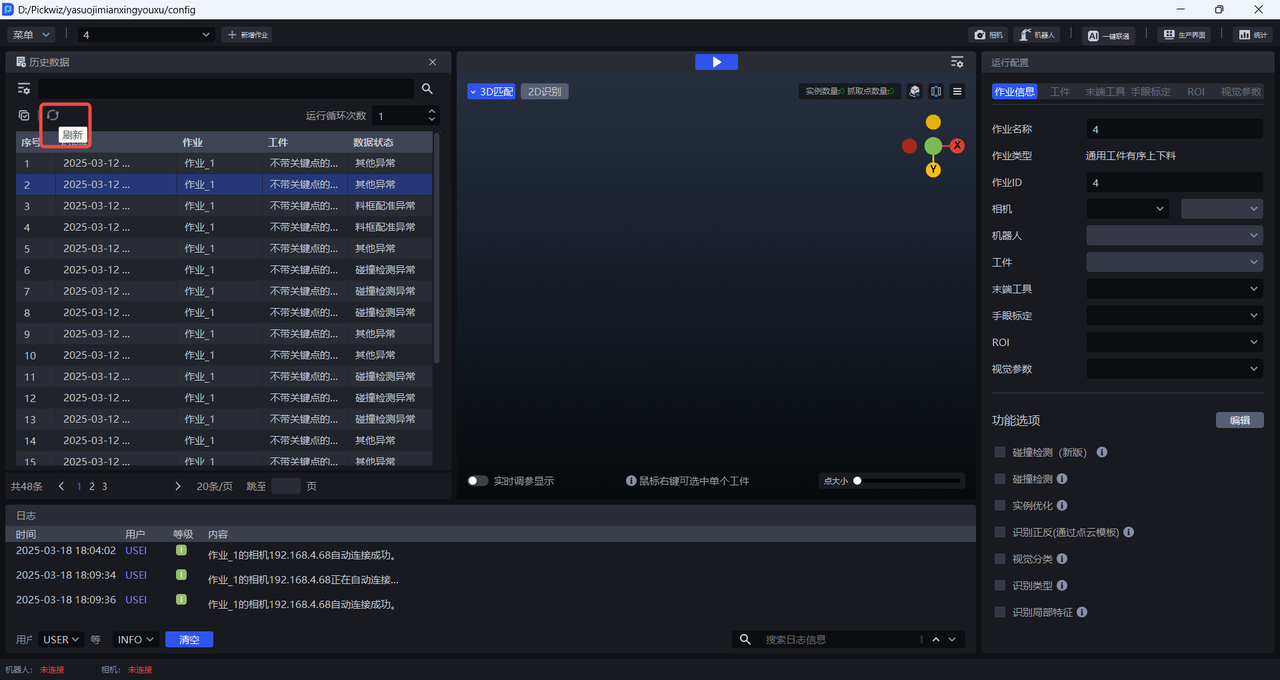
3. 刷新历史数据
点击 刷新 按钮可刷新出最新的历史数据。
4. 运行历史数据
(1)PickWiz 侧运行历史数据
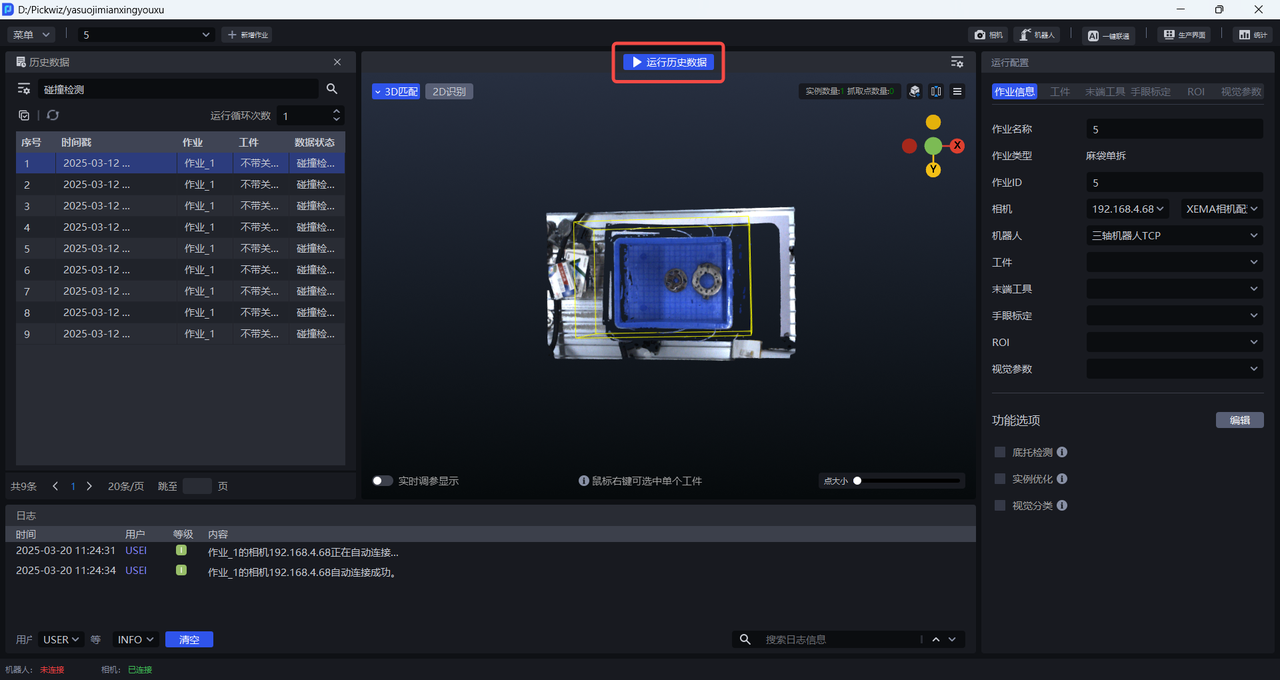
- 若需重新运行选中的历史数据,可进入 视觉计算配置 面板,将 输入数据 调整为"历史数据",最后点击"运行历史数据"按钮,即可重新运行该条历史数据。
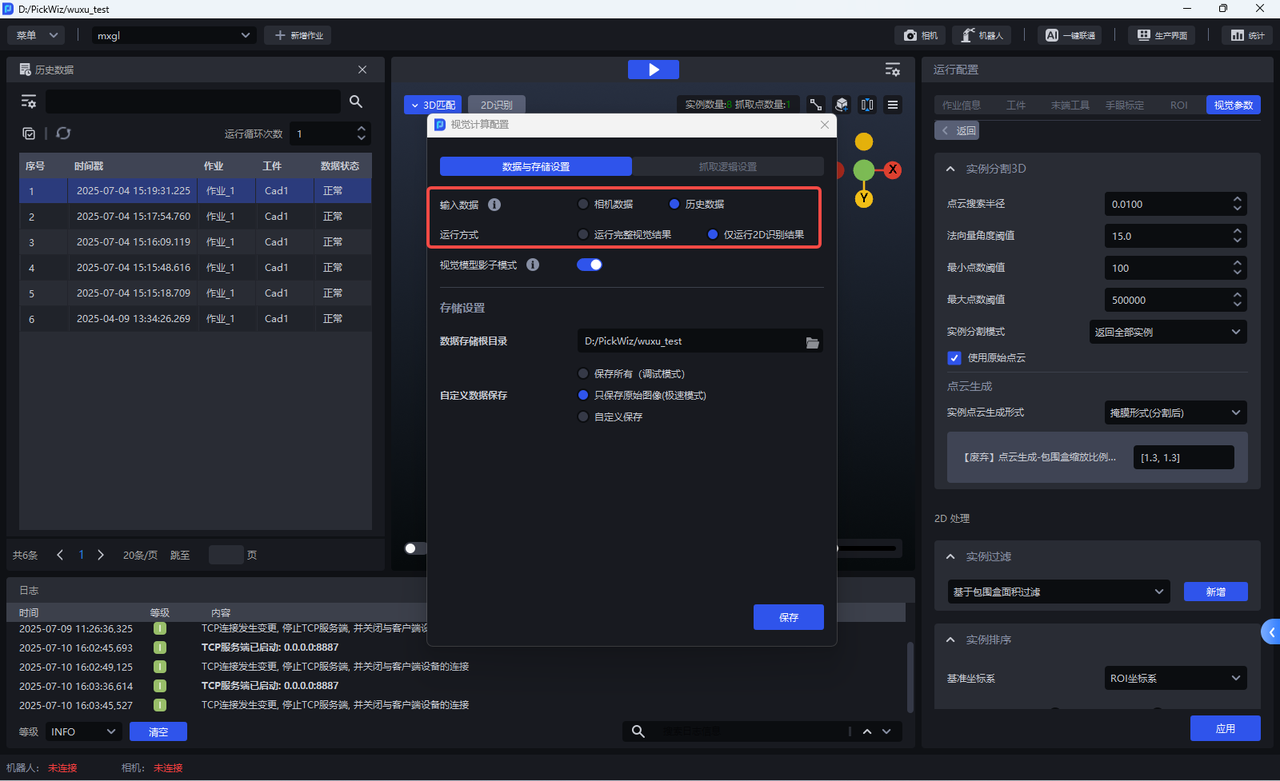
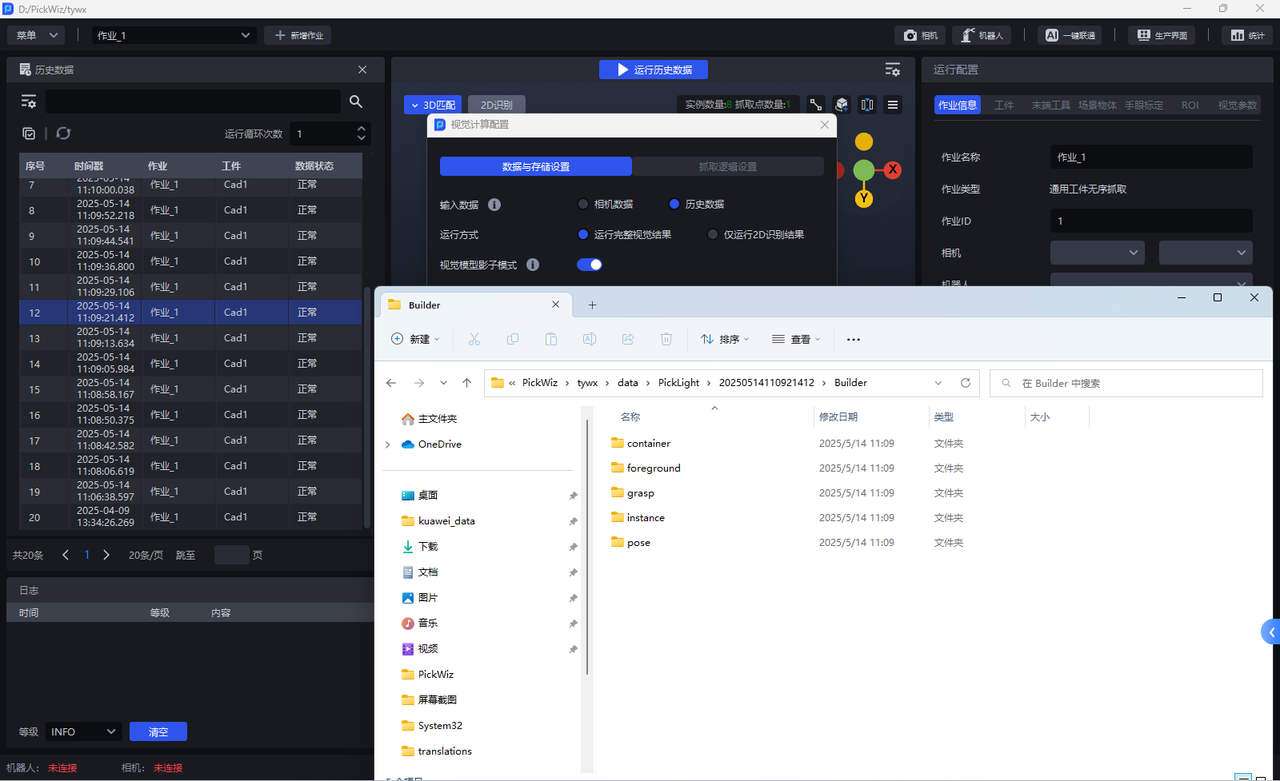
- 如需查看该条历史数据的2D识别结果和抓取点,可点击 运行完整的视觉结果,这种运行方式会再次保存该条历史数据重新运行的完整记录,如下图所示。
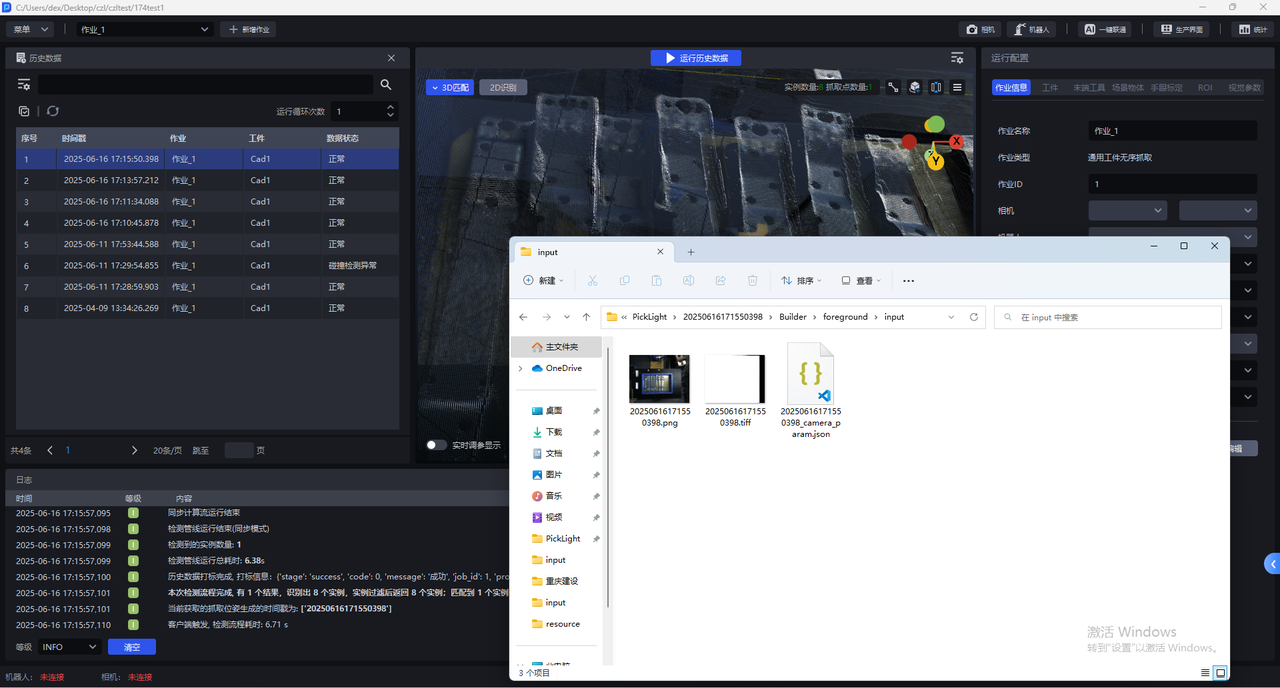
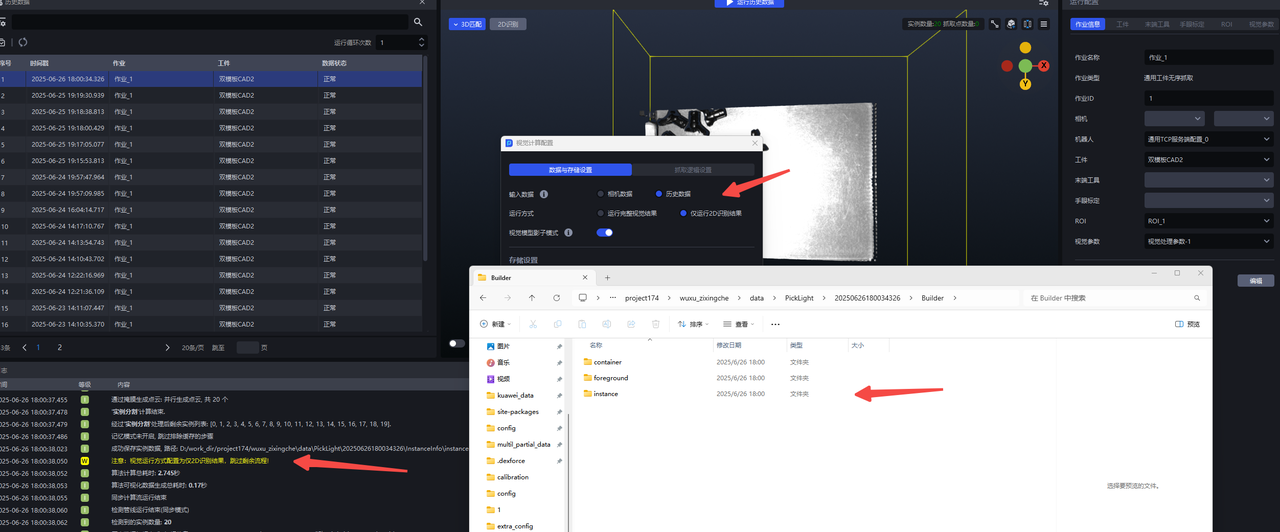
- 如仅需查看该条历史数据的2D识别结果、不需要查看该条历史数据的抓取点,可点击 仅运行2D运行结果,这种运行方式只会保存该条历史数据重新运行的2D识别结果(Builder文件夹只保存前景节点foreground、料框检测container、实例检测instance,不保存姿态估计节点pose、抓取点生成节点grasp),如下图所示。
(2)机器人侧运行历史数据
选中一条历史数据,机器人发送指令co值为5时,将触发使用历史数据运行视觉结果,如下所示。
机器人co指令触发仅支持单次运行历史数据,不支持批量运行历史数据。
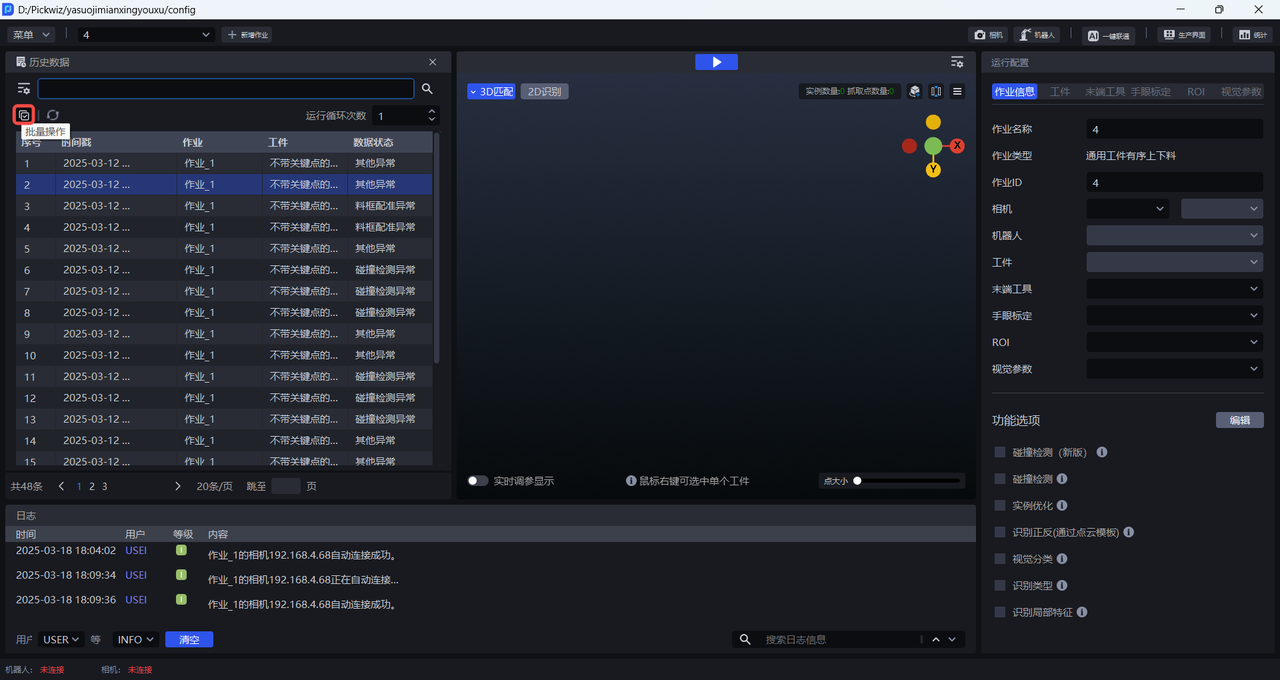
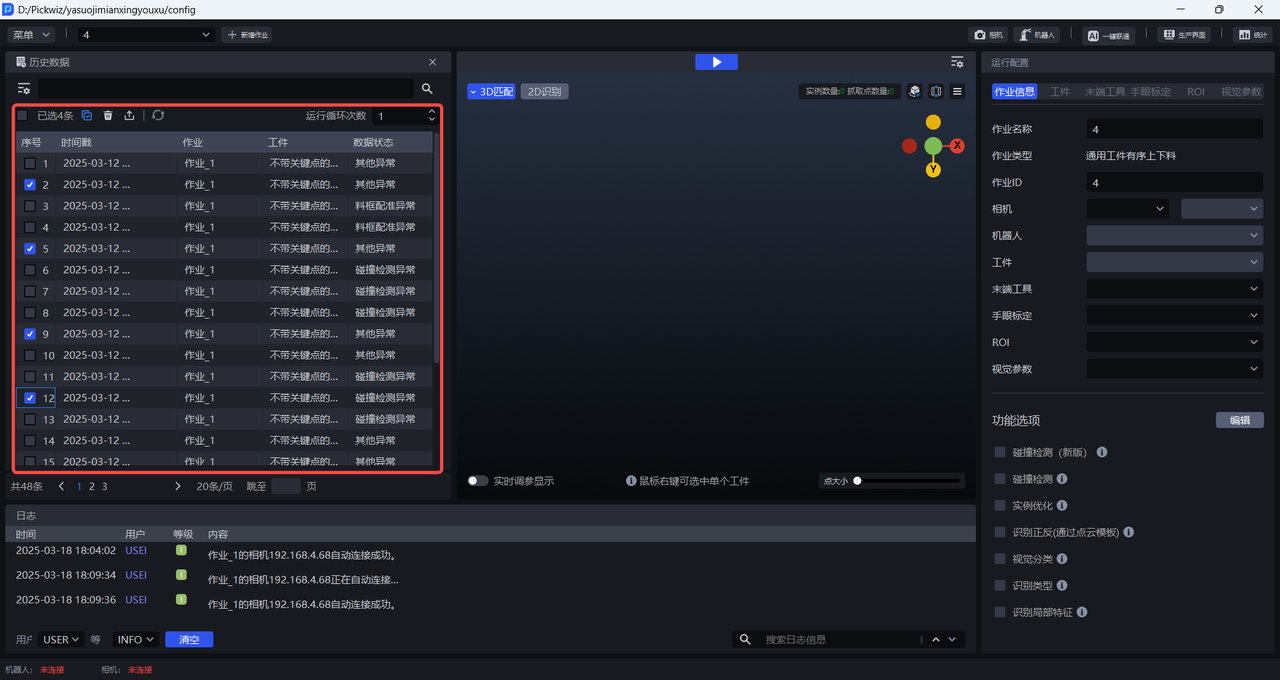
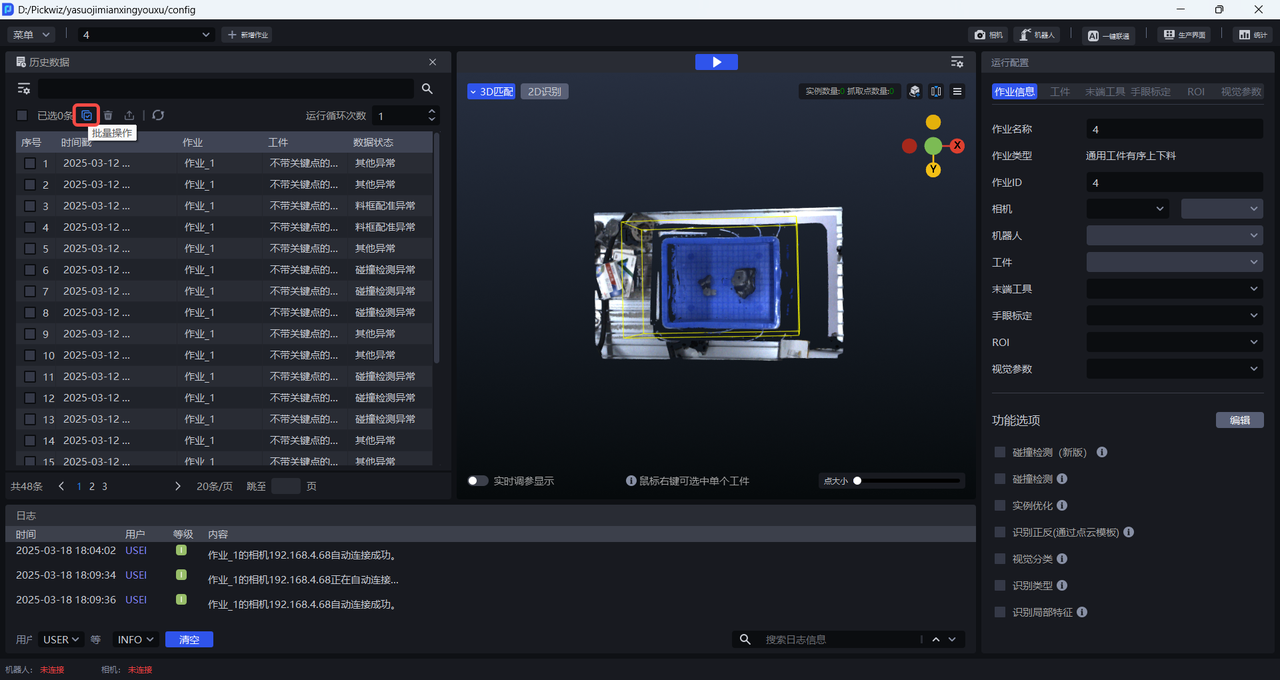
5. 批量操作
点击 批量操作 按钮可勾选多条历史数据进行批量删除、导出、运行
- 点击
🗑按钮可批量删除多条历史数据
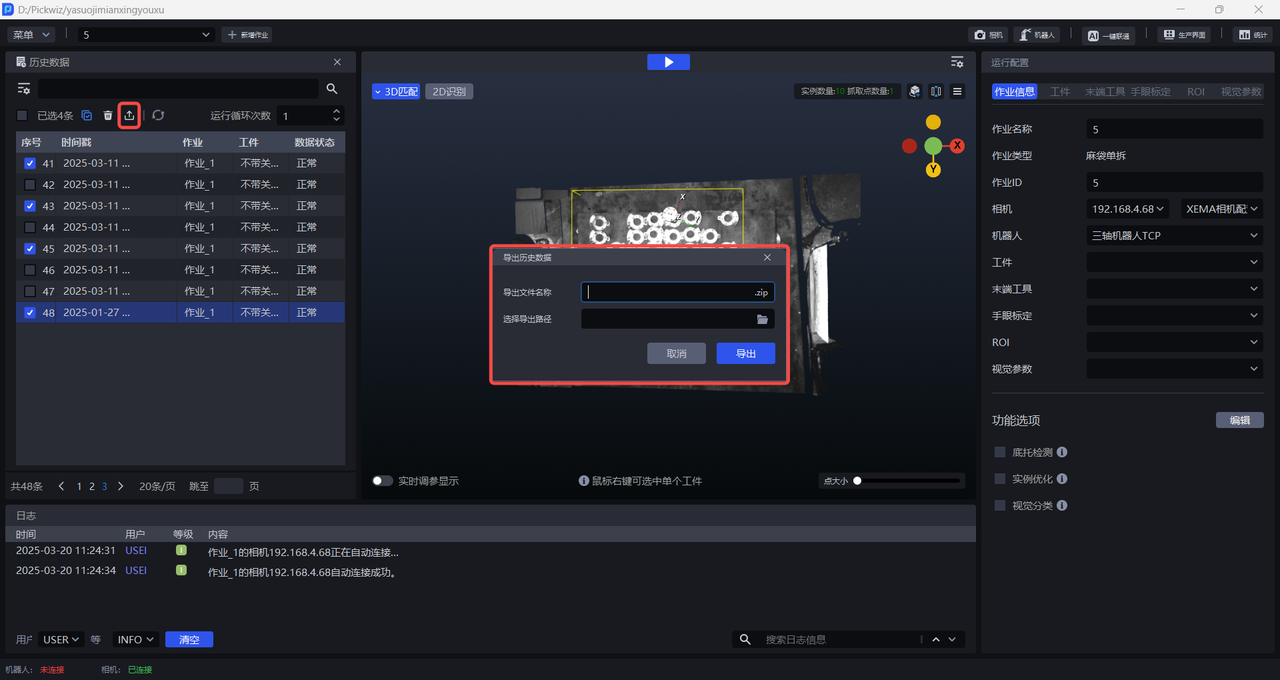
- 点击 导出 按钮可批量导出多条历史数据
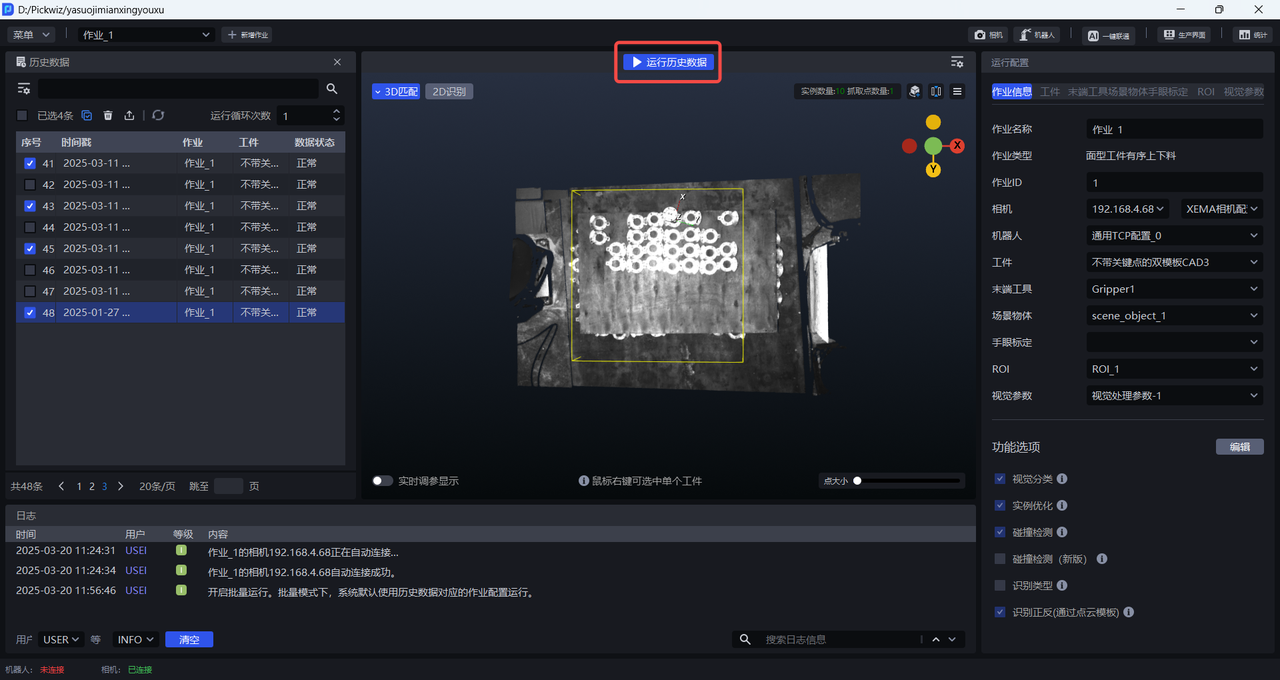
- 点击 运行历史数据 按钮可批量、逐一运行多条历史数据
- 再点击 批量操作 按钮可取消勾选批量操作功能
6. 运行循环次数
运行循环次数是指运行选中的历史数据n次,若勾选多条历史数据、运行循环次数大于1,那么多条历史数据将逐一运行,完成一轮运行后再进行下一轮运行。
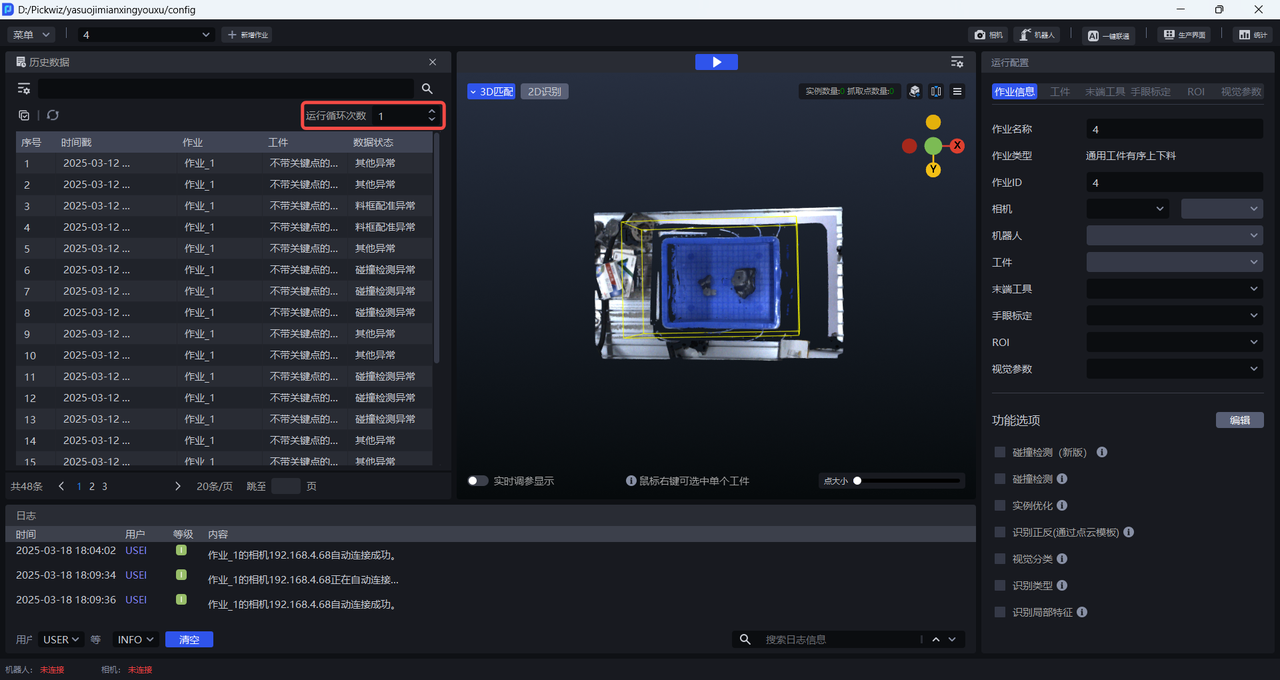
运行循环次数大于1时,可在主界面右下角查看当前历史数据运行进度

点击 停止历史数据 可停止循环运行

7. 历史数据存储管理
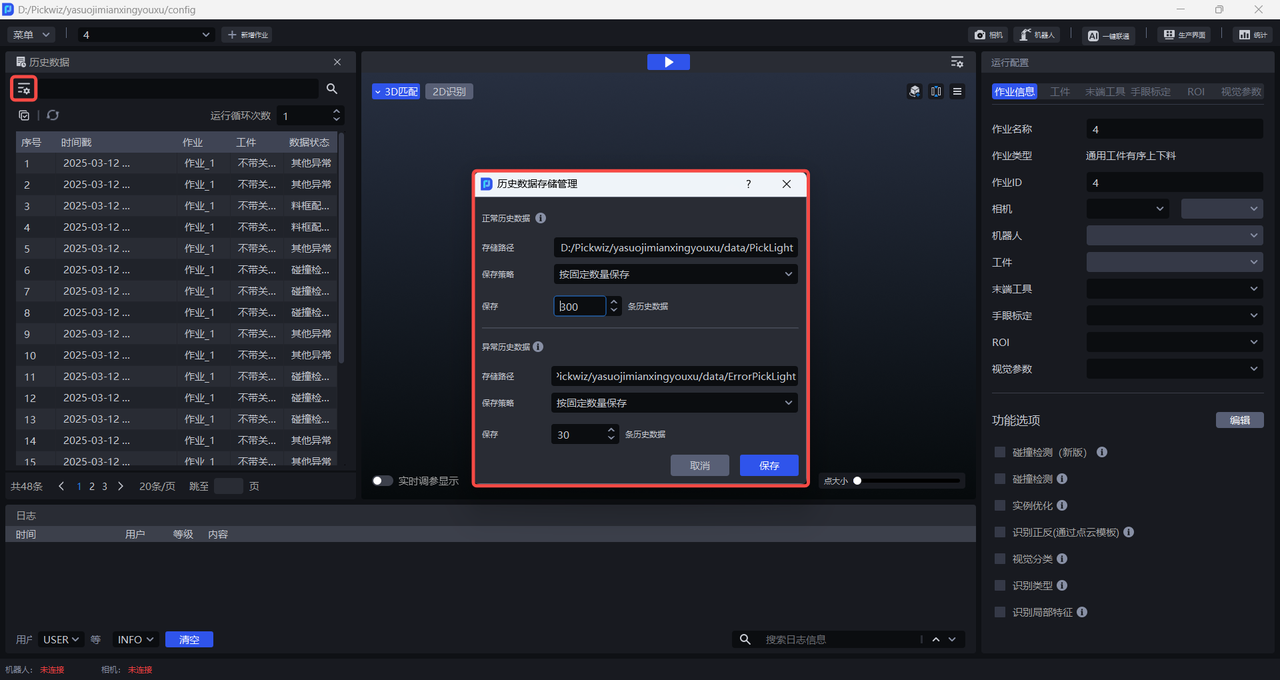
点击 可打开历史数据存储管理面板,查看存储历史数据的路径、设置历史数据的保存策略
- 正常历史数据
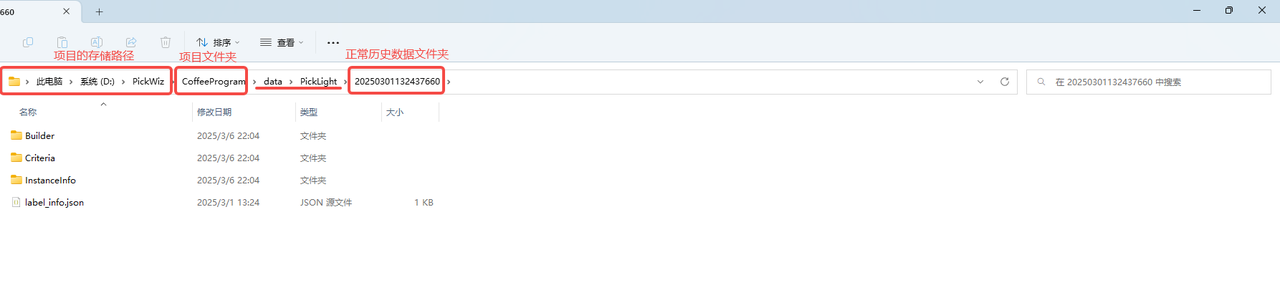
正常历史数据的存储路径是:项目所在文件夹/项目文件夹/data/PickLight
保存策略有按固定数量保存、按固定时间保存两种。按固定数量保存n条正常历史数据,默认保存300条;按固定时间保存n小时内正常历史数据,默认保存24小时。

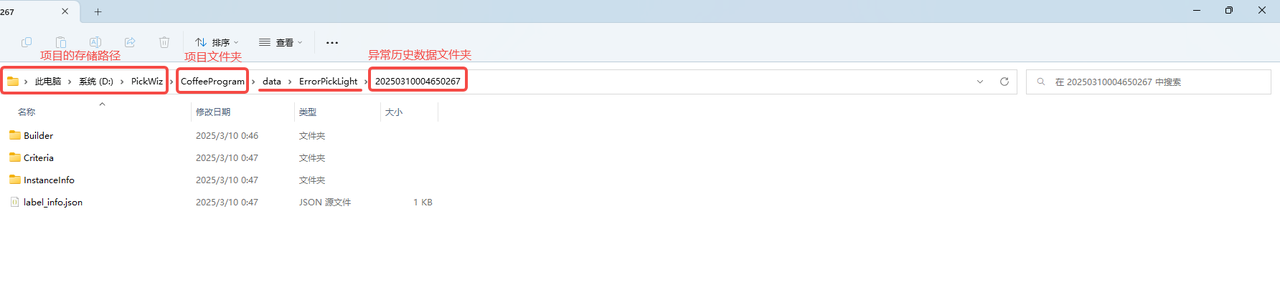
- 异常历史数据
异常历史数据的存储路径是:项目所在文件夹/项目文件夹/data/ErrorPickLight
保存策略有按固定数量保存、按固定时间保存两种。按固定数量保存n条异常历史数据,默认保存30条;按固定时间保存n小时内异常历史数据,默认保存24小时。
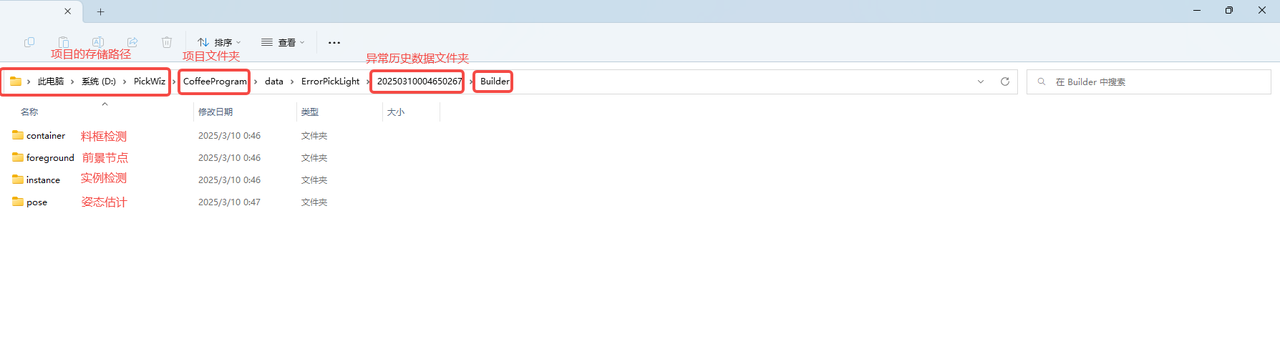

由异常历史数据可判断异常节点,如上图异常历史数据的抓取点生成文件夹(Builder/Pose)缺失,可知抓取点生成出现错误。