
外观
标定结果检查与分析
标定完成后,需要对标定结果进行检查,判断标定结果的精度是否能够满足实际场景的精度需求,如果标定误差超出正常范围,则需要定位误差原因,解决问题后重新标定,并再次检查直到标定结果精度满足场景要求。
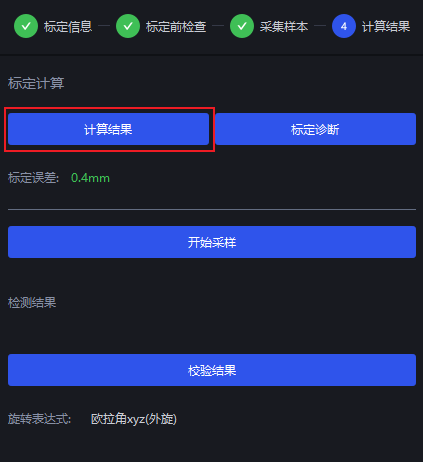
1. 标定诊断
在标定计算点击标定诊断,PickWiz 会在左侧的可视化视窗绘制出相关分析图。

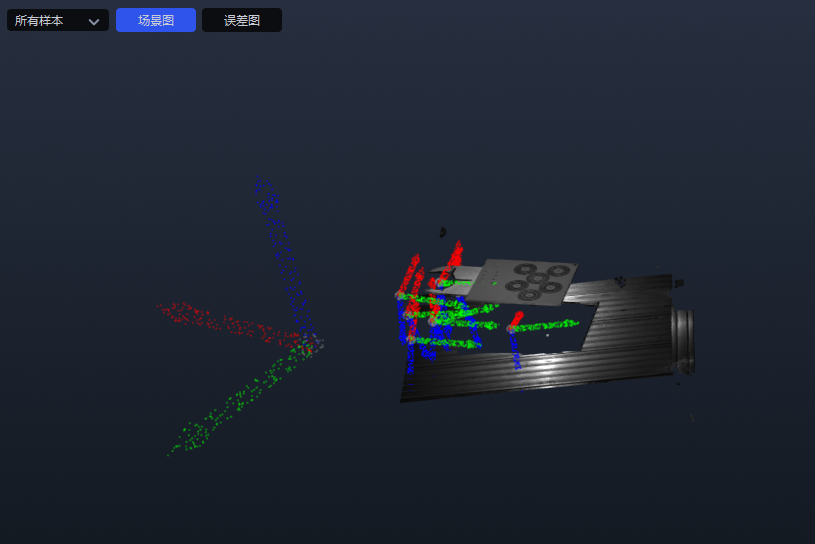
在可视化视窗可查看所有样本的场景图和误差图,以及保存的每个样本的样本图、场景图、点云图,如下图所示。

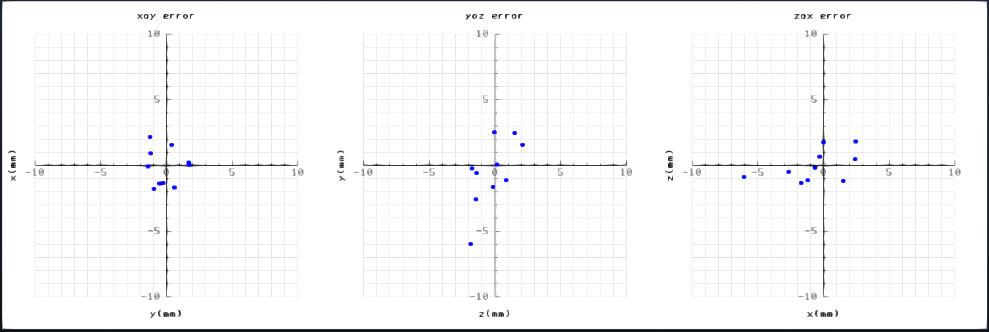
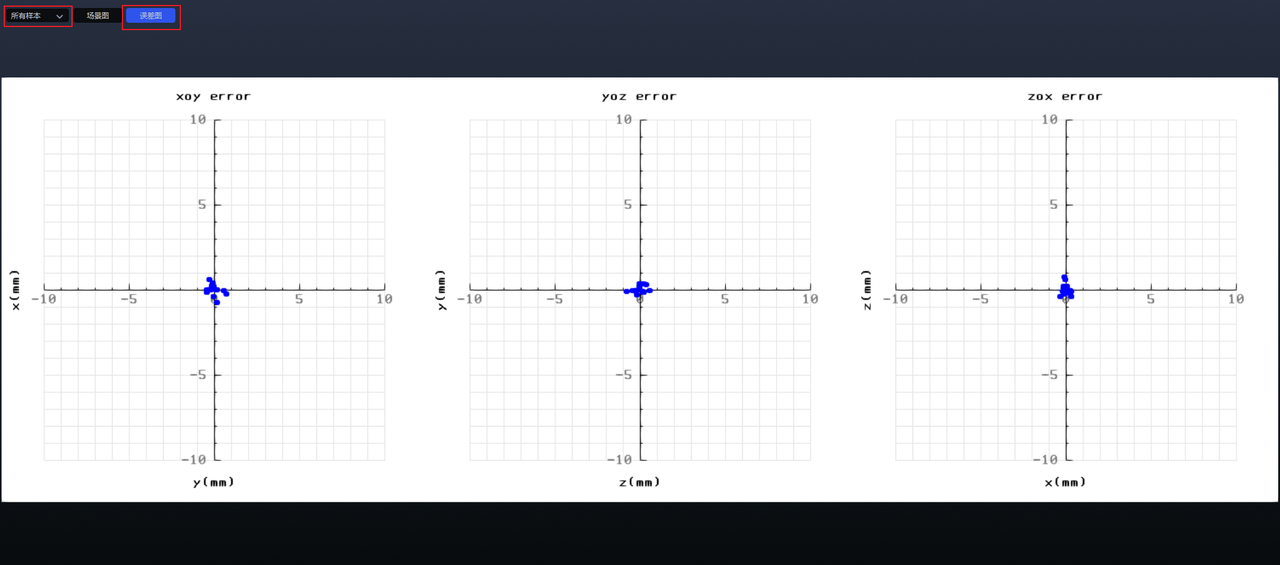
1.1 误差图
误差图用于显示标定板上每个圆心的真实位置与计算位置之间的偏差。误差图有3幅图,分别在XoY,YoZ,ZoX三个平面上显示误差,每个平面都以标定板圆心的真实位置为原点,通过在这三个平面上观察计算位置的偏差,可以直观地看出每个圆心在不同方向上的偏差情况,一小格代表一毫米误差。
查看3幅图上圆点的分布,如果3幅图的圆点都分布在中央,则说明标定板上每个圆心的真实位置与计算位置之间的误差较小,标定结果可用,如下图所示。
如果圆点分布离散,则说明标定板上圆心的真实位置与计算位置之间的误差很大,标定结果不可用,需过滤采样样本或者重新标定,如下图所示。
1.2 场景图
场景图用于显示机器人的基座和采样时机械臂末端的姿态分布情况,较大的坐标轴表示机器人的基座坐标,几个小的坐标轴表示每次采样的机械臂末端坐标。
标定诊断时,仅结构光相机(Xema、Finch、Sparrow系列相机)有场景点云,双目相机(Kingfisher系列相机)没有场景点云
下图所示是所有样本的场景图,可观察机械臂末端的姿态分布情况,若机械臂末端较均匀地分布且坐标轴有较大角度的旋转,则说明标定结果可用。
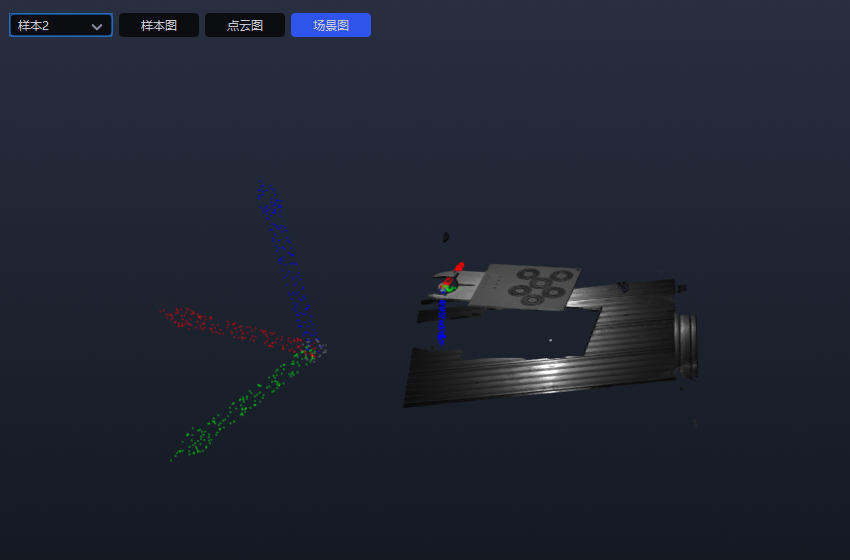
若所有样本的场景图显示机械臂末端分布较为紧密或者坐标轴旋转角度较小,则标定结果不可用,可切换样本x的场景图逐一查看每次采样时机器人的基座坐标和机械臂末端坐标,找到异常的样本。
找到异常的样本后,若在线获取坐标 选择 是,应过滤采样样本或者重新标定;若在线获取坐标 选择 否,应先检查手动输入的机器人位姿的顺序或单位是否错误,如有错误应修正后点击计算结果重新计算标定结果,如无错误应过滤采样样本或者重新标定。

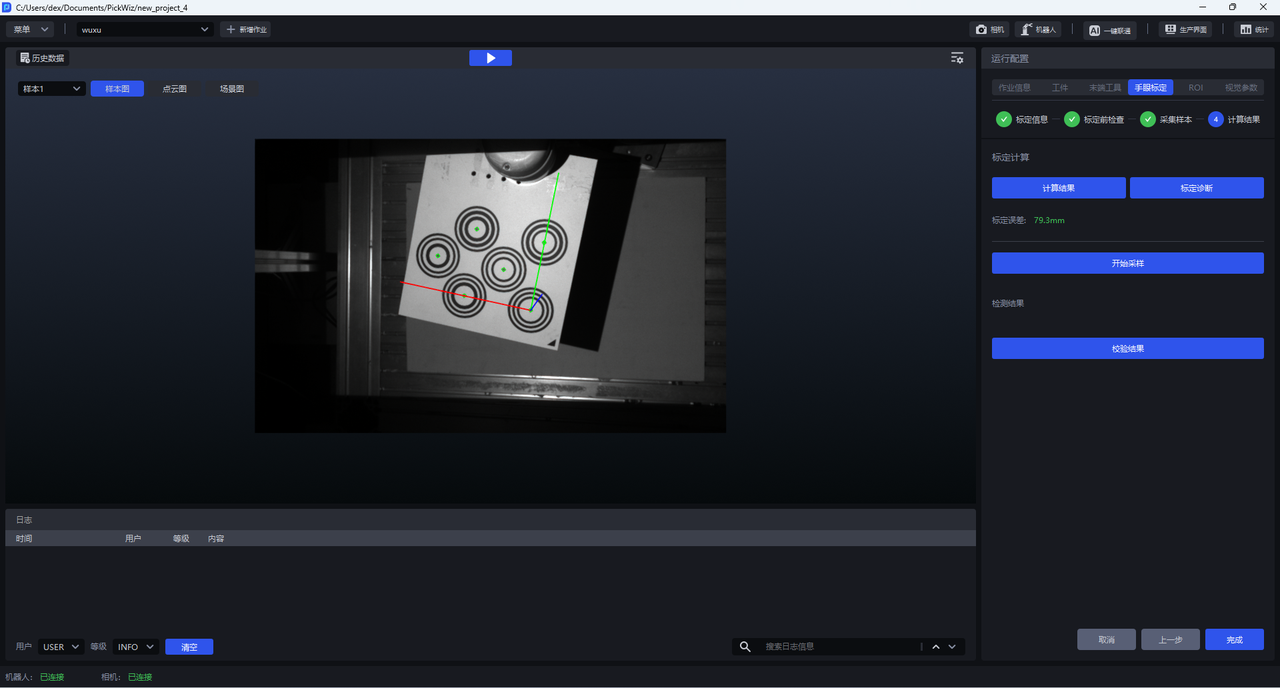
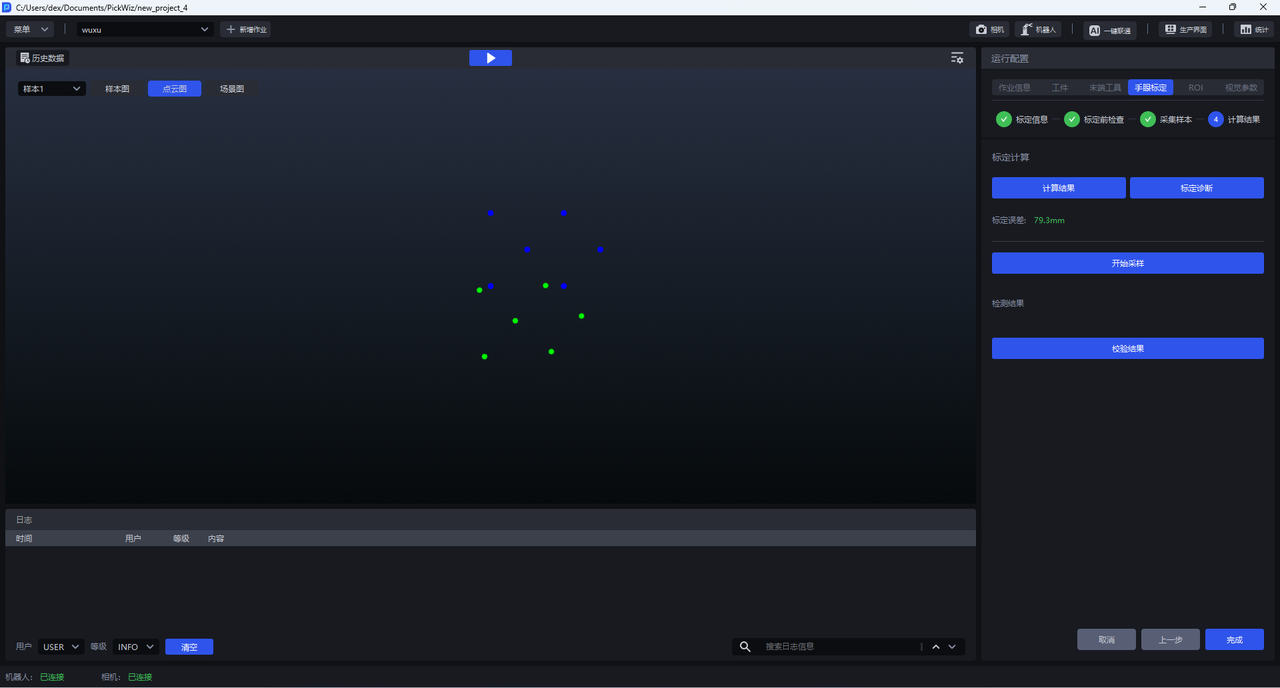
1.3 点云图
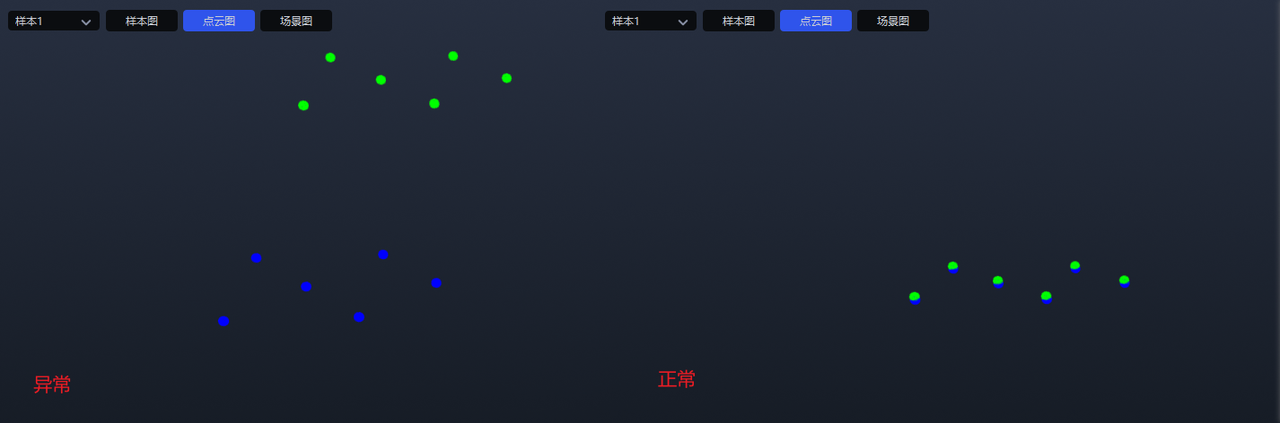
点云图用于显示每次采样时标定板的重投影情况。蓝色点是标准的标定板姿态,绿色点是重投影后标定板的姿态。蓝色点与绿色点重合度越高,说明标定结果的精度越高。
切换样本x的点云图可查看每次采样时标定板的重投影情况,如下图所示。
若蓝色点与绿色点重合度不高或完全不重合,则说明标定结果不可用。若在线获取坐标 选择 是,应过滤采样样本或者重新标定;若在线获取坐标 选择 否,应先检查手动输入的机器人位姿的顺序或单位是否错误,如有错误应修正后点击计算结果重新计算标定结果,如无错误应过滤采样样本或者重新标定。
2. 校验标定结果
手眼标定完成后,可以通过控制机器人针尖工具戳点,对比机械臂坐标和视觉给出的坐标,判断标定结果是否满足要求。
校验前,应当在示教器上确认机器人当前坐标系与标定时选用的坐标系一致
- 进入
计算结果阶段,将标定时采用的标定板放置在相机视野下。
点击
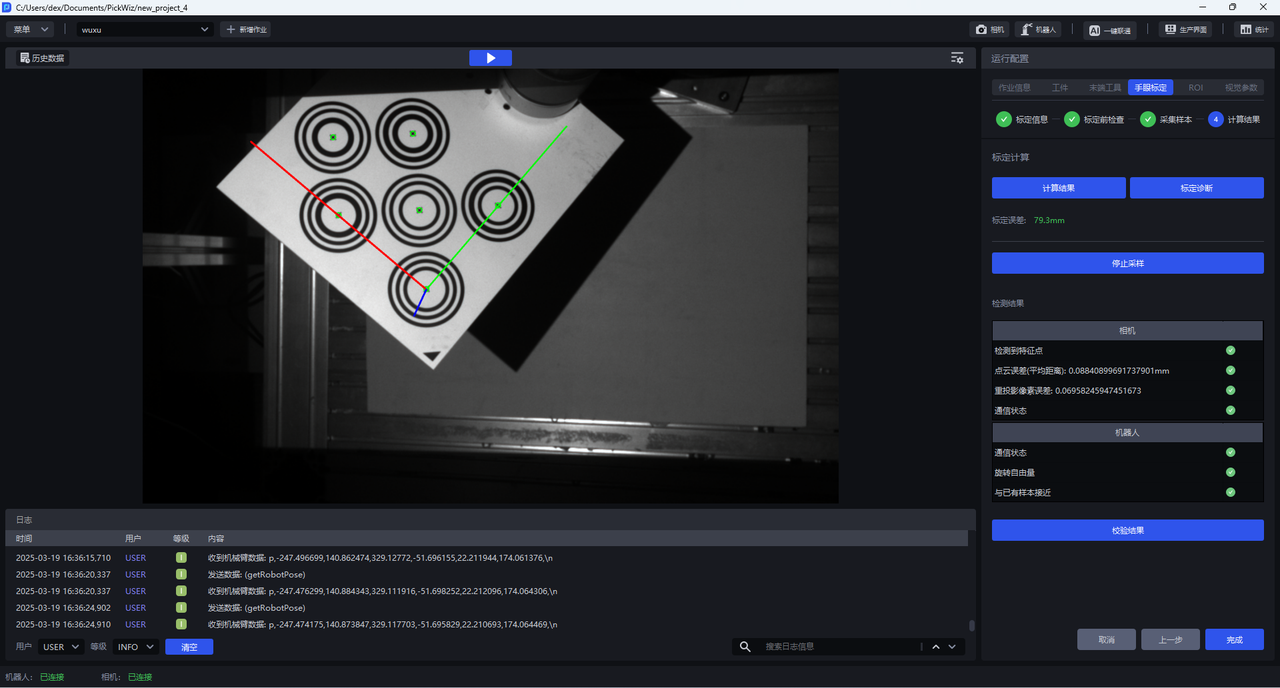
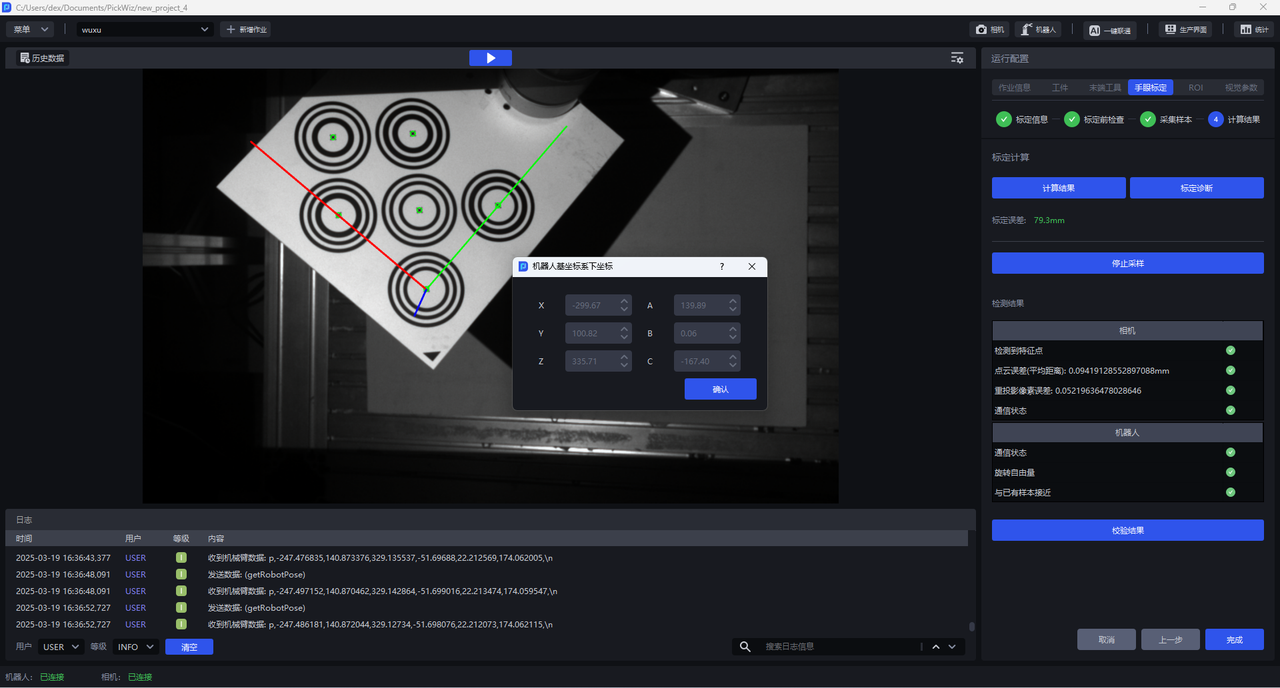
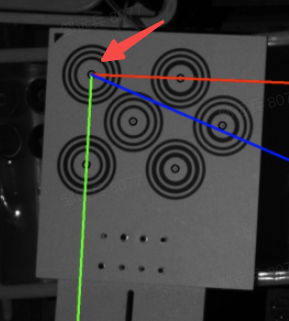
开始采样,开始采样按钮会变成停止采样,相机检测和机器人检测全部绿色图标通过后,可视化视窗中的标定板上会出现一个坐标轴,每个同心圆的圆心变为绿色点击
校验结果按钮,会出现机器人基坐标系下坐标弹窗,该坐标是标定板上的坐标轴中心在机器人基座坐标系下的坐标。
若在线获取坐标 为是, 则自动计算该坐标,如下图所示。
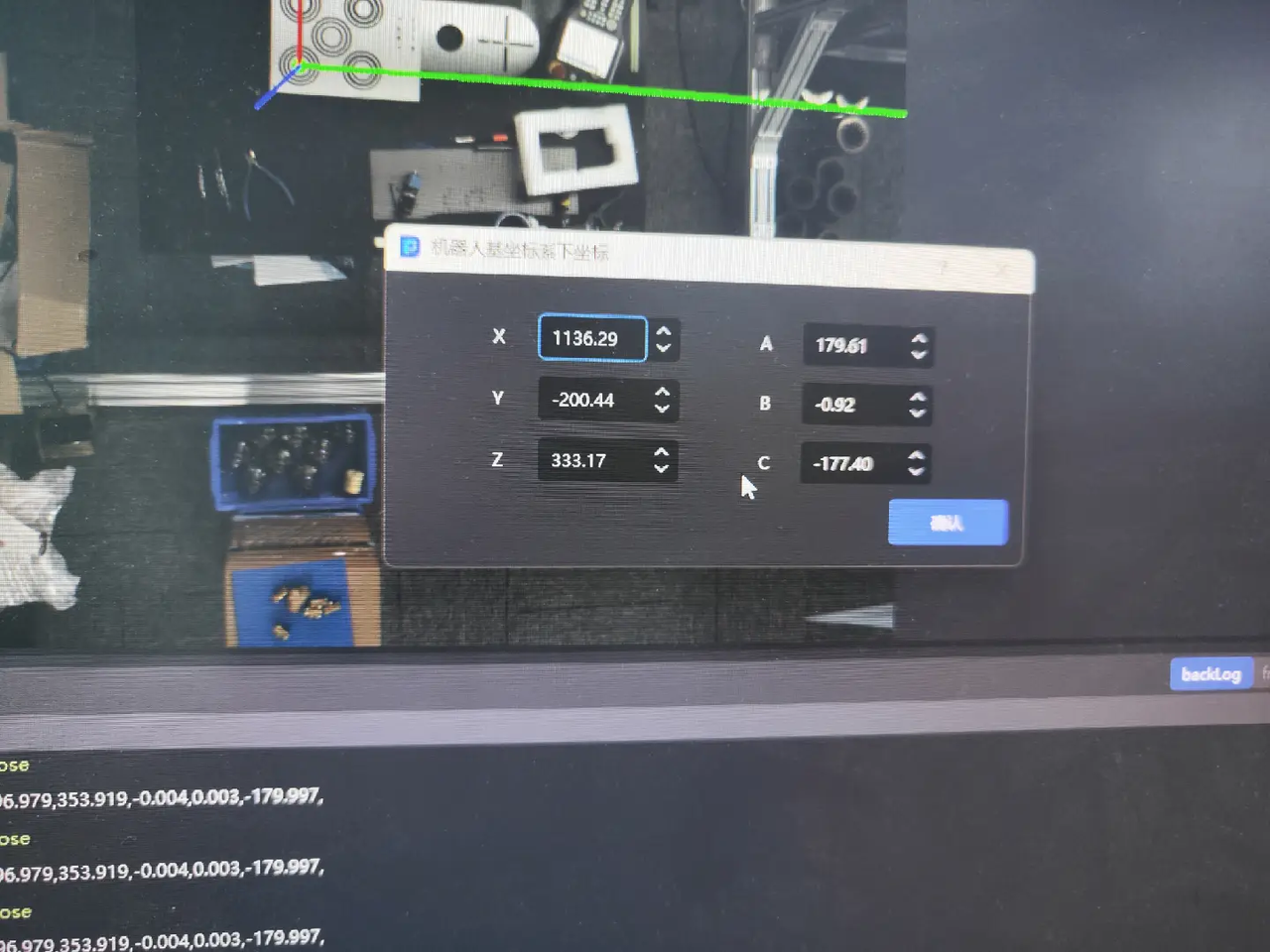
若在线获取坐标 为否, 则需要先手动填入该坐标,如下图所示。
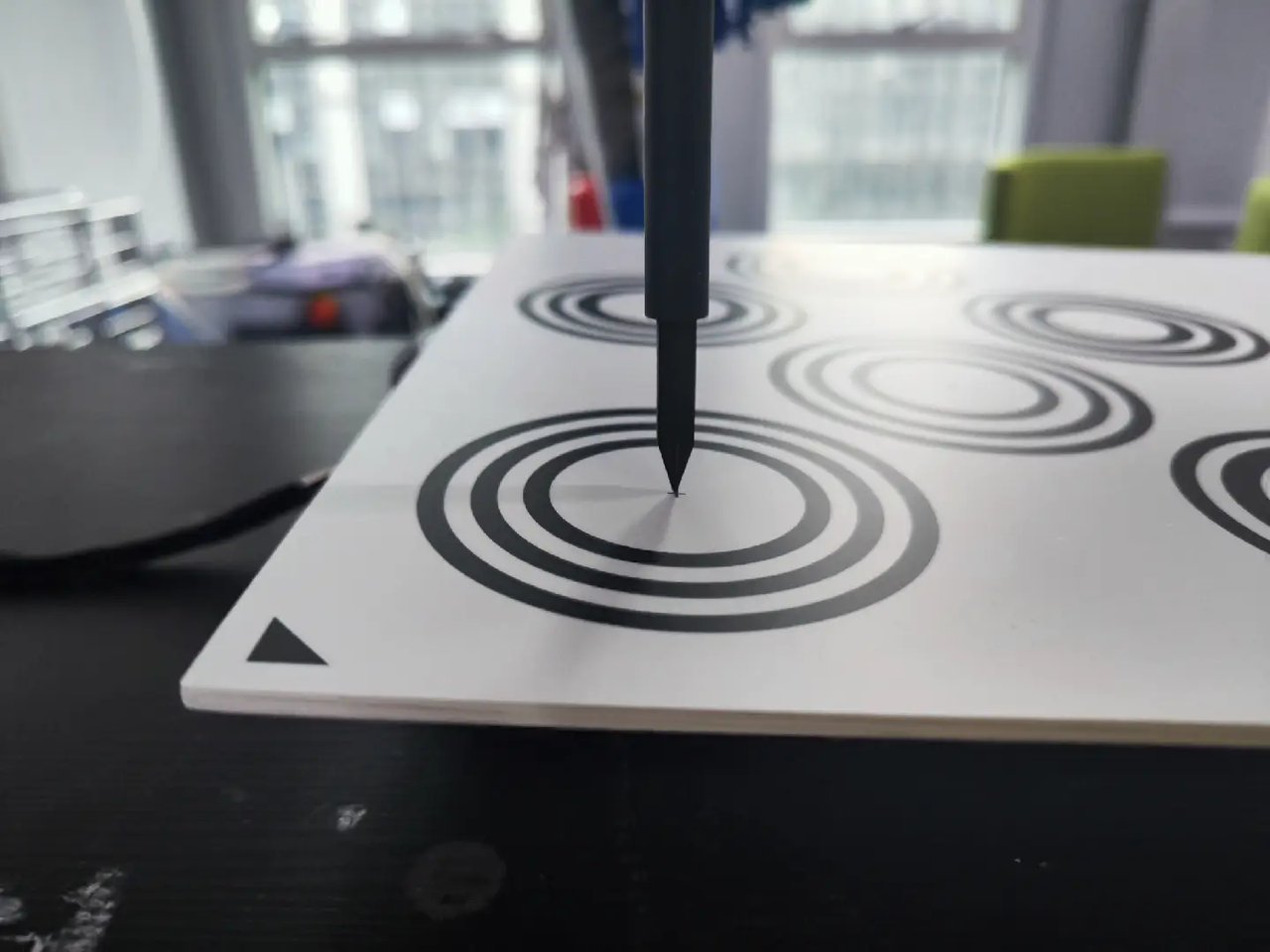
- 在机械臂末端安装针尖工具,新建一个工具坐标在针尖工具末端,控制机器人移动使针尖指向标定板上的坐标轴中心,如下图所示。
- 对比此时视觉给出的针尖坐标与机器人示教器上的针尖坐标,判断标定结果的精度是否满足要求。若二者差异较小,则标定结果可用,否则标定结果不可用,应检查手动输入位姿的顺序或单位是否错误,检查针尖工具戳点是否有偏差,如检查无误应重新标定。
3. 过滤采样样本
点击计算结果后,PickWiz 会将已采集的样本中误差过大的样本过滤,不纳入最终的标定计算。可在采样阶段的已采集的样本中查看置灰的样本,同时下方会提示过滤的样本ID。
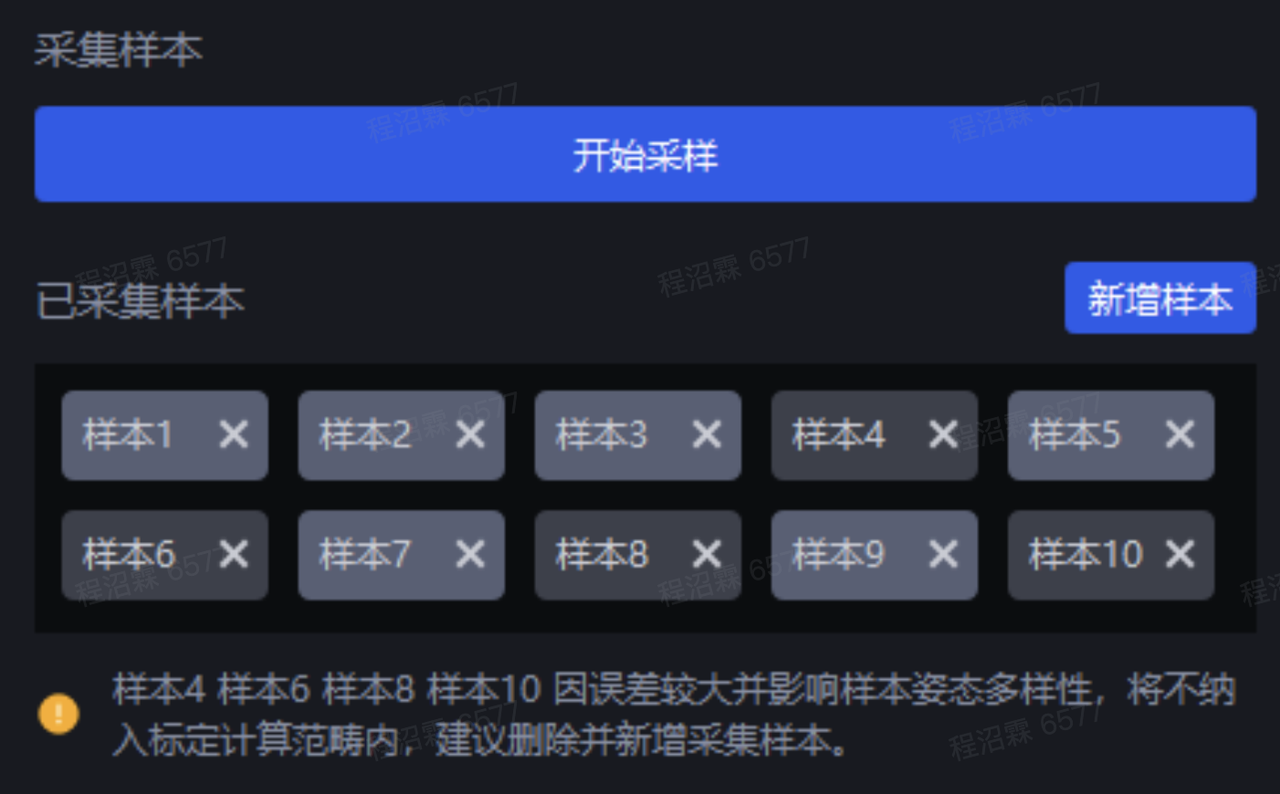
若标定诊断中样本的误差图、场景图、点云图显示标定精度较好,则保留过滤的样本,否则删除过滤的样本。