
外观
隔板和底托检测使用指南
隔板和底托检测功能主要用于有序场景中,每层工件下均带有隔板,在抓取完工件后还需进行隔板和底托的抓取。本文主要介绍开启隔板和底托检测后如何进行设置和使用。
1. 操作指南
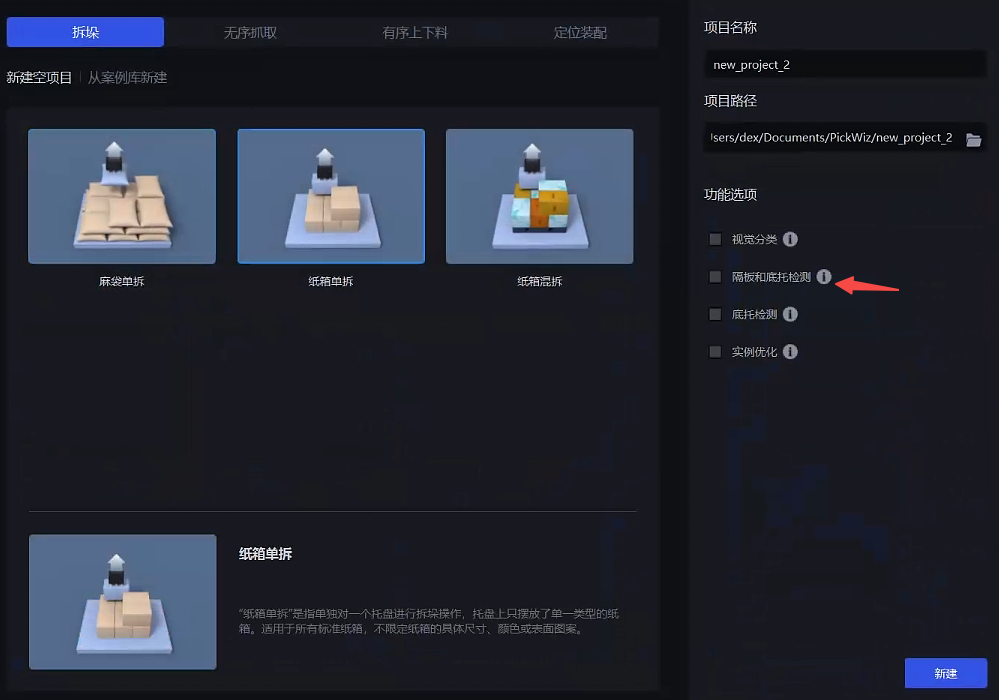
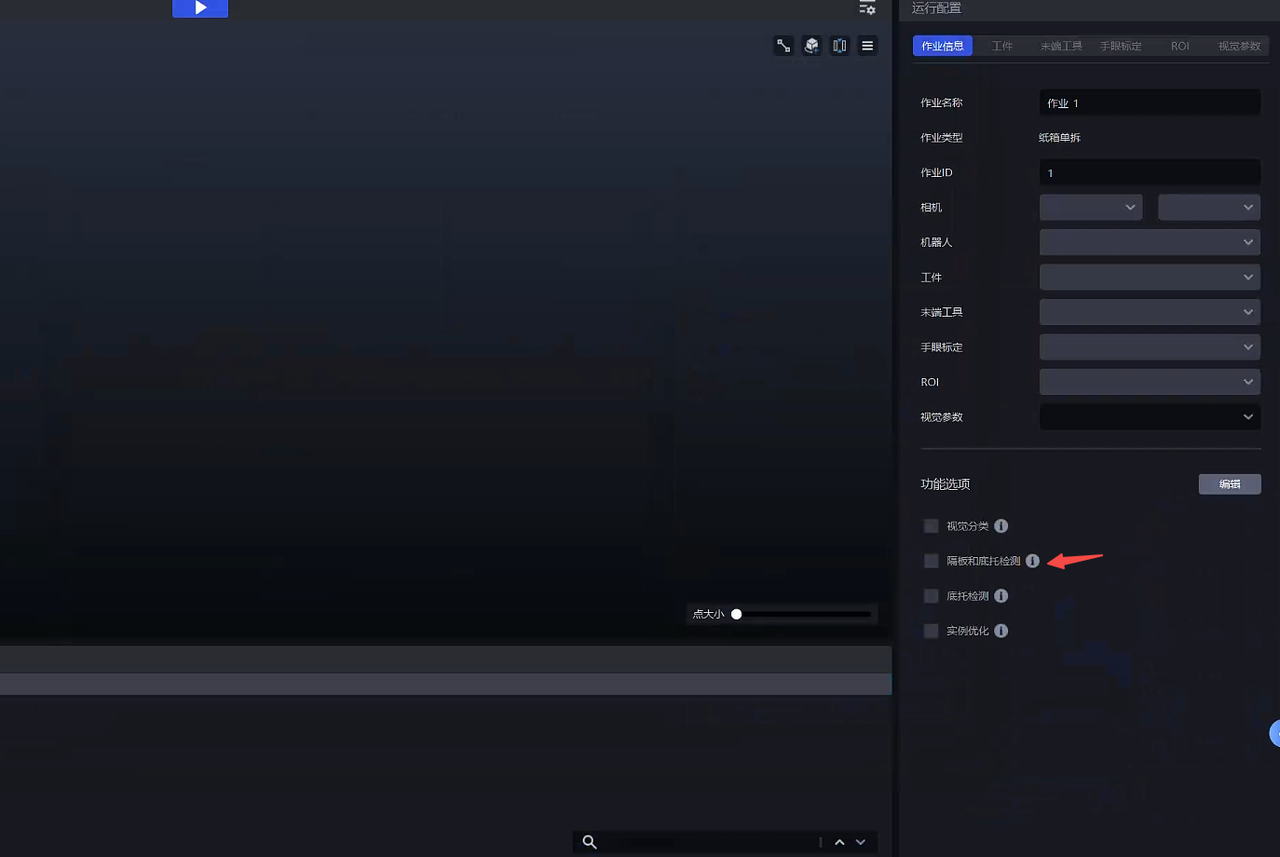
当实际场景中每层工件下均有隔板,在新建项目或者新建作业时,勾选 隔板和底托检测 功能;若新建项目或新建作业时未勾选,则在作业信息界面,点击右下方编辑,然后勾选隔板和底托检测
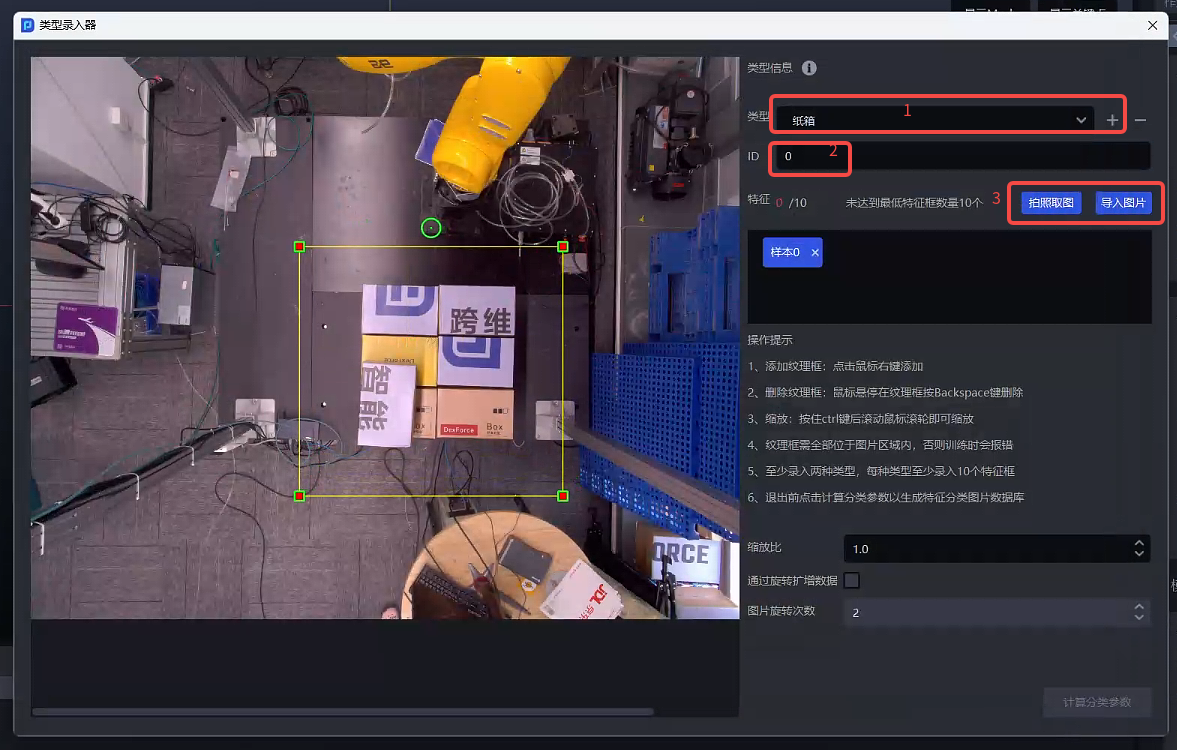
添加插件后,在工件界面新增工件,点击工件信息-视觉分类 的录入类型按钮,分别对工件、隔板和底托录入类型。

录入类型
具体参考: 视觉分类使用指南
点击 + 添加类型
填写类型id
拍照取图或者导入图片
在图片中框选对应图片区域,框选区域需要与roi2d区域一致,每种类型至少录入10个样本
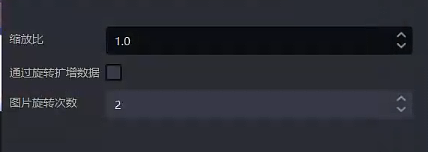
调整参数
| 参数 | 说明 | 默认值 | 取值范围 | 调参建议 |
|---|---|---|---|---|
| 缩放比 | 对录入的类型数据库图片进行缩放,提取图片特征。缩放比越小,计算类别信息速度越快。 | 1.0 | 0.1 - 2.0 | 1.0 |
| 通过旋转扩增数据 | 旋转录入的类型图片对类型数据库的图片数量进行扩增 | 勾选 | / | / |
| 图片旋转次数 | 勾选通过旋转扩增数据后,根据图片旋转次数扩增数据库的图片数量如图片旋转次数为4,则图片每次逆时针旋转90°(360°/4),共旋转4次;如图片旋转次数为3,则图片每次逆时针旋转120°(360°/3),共旋转3次 | 2 | [1,360] | 取值越大,扩增的图片角度越多 |
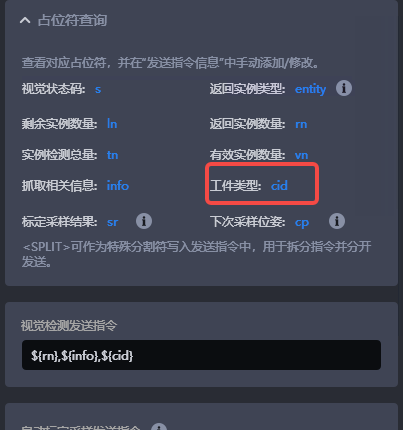
测试录入后,打开机器人配置,在视觉检测发送指令中,添加 工件类型指令符‘{cid}’
2. 调参指南
通过调整视觉参数,视觉系统可基于录入的分类数据,更好地区分识别隔板、底托。
隔板和底托检测默认使用了 最上层纹理提取 函数,因此大部分参数与提取最上层纹理参数一致。

| 参数 | 说明 | 默认值 | 取值范围 | 调参建议 |
|---|---|---|---|---|
| 距离阈值(m) | 最上层平面提取的距离上限阈值,点与平面平面距离低于该值的点被认为是平面内的点,否则认为是平面外的点,单位是m | 0.05 | 0.0001-1 | 根据工件高度调整距离阈值,通常为高度的1/2 |
| 聚类点云数量 | 期望参与聚类的点数量 | 10000 | 1-10000000 | 聚类点云数量越多,模型推理速度下降而精度提升;聚类点云数量越少,模型推理速度提升而精度下降 |
| 类别点最小数量 | 用于过滤类别的最小点数 | 1000 | 1-10000000 | / |
| 自动计算反差背景 | 勾选后则根据当前实例的色调自动计算与之差异大的黑色或者白色 | 勾选 | / | / |
| 背景色阈值 | 当勾选 '自动计算反差背景' 后,实例本身的颜色值大于 '背景色阈值'时,背景置为黑色,小于时为白色; 当不勾选'自动计算反差背景'时,该参数的值即为背景色,注意0为黑色255为白色 | 128 | 0-255 | / |
| 保存图片分类器数据 | 勾选时保存图片分类器数据 | 不勾选 | / | 勾选后会保存数据,增加耗时;在前期需要补录分类数据时候,建议开启 |
| 推理尺寸缩放比 | 图像分类推理时候的缩放比例 | 1.0 | 0.01-1.0 | 与录入类型中的 缩放比保持一致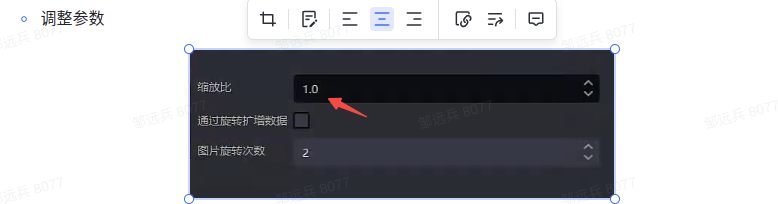 |