
外观
KINGFISHER系列相机使用手册
1. 产品简介
KINGFISHER 智能 3D 相机基于双目立体成像技术,模仿人类双眼视觉原理,利用两个相机从不同角度获取图像,并通过使用 Sim2Real 训练的智能算法,使用两组不同角度的图像,可以在各种环境光下,最快 0.5s 内精确重建场景的三维点云 ;解决了传统 3D 相机易受到环境光的影响、成像时间较慢、相机使用寿命短、成本较为高昂等,有效提升视觉系统的稳定性,为 3D 成像领域带来了革命性的创新和突破。
2. 安全须知
请仔细阅读安全须知,严格按照下述规范操作,否则将严重损害相机,跨维不负责由此产生的维护问题
严禁水泡
严禁火烧
严禁拆机
严禁私接电源
严禁私自延长网线
严禁在潮湿、有凝露或高粉尘环境下使用相机
严禁在强磁场、高压放电设备(如电焊机)环境下使用相机
严禁外力撞击,摔打,如发生请联系工作人员检修
远离激光打标机、镭雕机等会对相机造成损坏的设备,如必须使用,请联系公司人员确认
严禁超距使用,使用距离:XEMA-P:100-150mm;XEMA-DCW:0.3-0.5m;XEMA-SCW:0.5-1m;XEMA-LCW:1-2.5m;SPARROW:0.3-0.5m;FINCH:1.5-3.5m:如有特殊定制需提前跟相机组沟通需求
严格按照产品规格书在高低温允许温度范围内使用相机。
3. 规格参数
| 参数 | KINGFISHER-S-601 | KINGFISHER-S-1001 | KINGFISHER-W-3003 | KINGFISHER-S-1201W | KINGFISHER-W-1201W | KINGFISHER-W-300W |
|---|---|---|---|---|---|---|
| 基线 | 60 | 150 | 400 | 150 | 400 | 400 |
| 视场角 | 46°/42°(H/V) | 48°/39°(H/V) | 50°/43°(H/V) | 59°/47°(H/V) | 60°/46°(H/V) | 60°/45°(H/V) |
| 分辨率 | 1280*1024 | 1280*1024 | 1280*1024 | 4024*3036 | 4024*3036 | 2048*1536 |
| 推荐工作距离(mm) | 200 - 500 | 500 - 2000 | 1500 - 3500 | 500 - 2000 | 1500 - 3500 | 1500 - 3500 |
| 视野(mm) | 近视场135*157 远视场433*393 | 近视场455*355 远视场1803*1425 | 近视场1452*1166 远视场3274*2721 | 近视场559*440 远视场2283*1760 | 近视场1774*1276 远视场4012*2978 | 近视场1605*1270 远视场3873*2965 |
| 典型采集时间(s) | 1 | 1 | 1 | 1 | 1 | 1 |
| 重复精度(mm) | 136 | 259 | 272 | 259 | 272 | 376 |
| 接口 | GigE | GigE | GigE | GigE | GigE | GigE |
| 供电 | POE | POE | POE | POE | POE | POE |
| 尺寸(mm) | 155*145*60 | 209*134*46 | 457*129*48 | 209*134*46 | 457*129*48 | 457*129*48 |
| 重量(kg) | 1.1 | 1.0 | 1.5 | 1.0 | 1.5 | 1.5 |
4. 安装与连接
4.1 开箱检查

| 配附件名称 | 数量 | 用途 |
|---|---|---|
| KingFisher相机 | 1 | 采集图像 |
| 标配千兆网线 | 1 | 连接相机、传输数据 |
| 标配电源线 | 1 | 连接相机、相机供电 |
| 适配标定板 | 1 | 参数检查、外参校正 |
4.2 硬件安装
相机通过网线与 POE 交换机相连,POE 交换机为相机供电,将电脑网线连接POE 交换机。



4.3 MVS连接与配置
MVS安装
MVS软件是海康威视工业相机客户端软件,具有实时预览相机画面、修改相机设备参数、抓图、录像存储、在线设备升级等功能,可帮助工程师和开发者快速配置和调试相机,确保图像采集的准确性和稳定性。
跨维目前使用MVS软件来配置和调试KingFisher相机,工控机已安装该软件,如需自行安装请点击如下地址下载软件https://www.hikrobotics.com/cn/machinevision/service/download/?module=0
MVS配置相机正常连接以及获取内外参标定文件
双目windows PickWiz部署(应用向)(内部),参考链接文档内演示视频或3.1~3.2部分内容

双目windows PickWiz部署(应用向)
目的
介绍发货至现场的机器如何进行一些基础配置以及联调条件准备。
必做流程:修改相机IP至可连接 -> pickwiz连接相机并配置可出点云 -> 红线图校验(相机精度)
视频演示
图文步骤
连接相机,修改相机IP至同一网段
打开MVS软件
若未安装:下载地址
PS:使用3D海康软件可能会引起修改IP成功但ping不通的情况,如
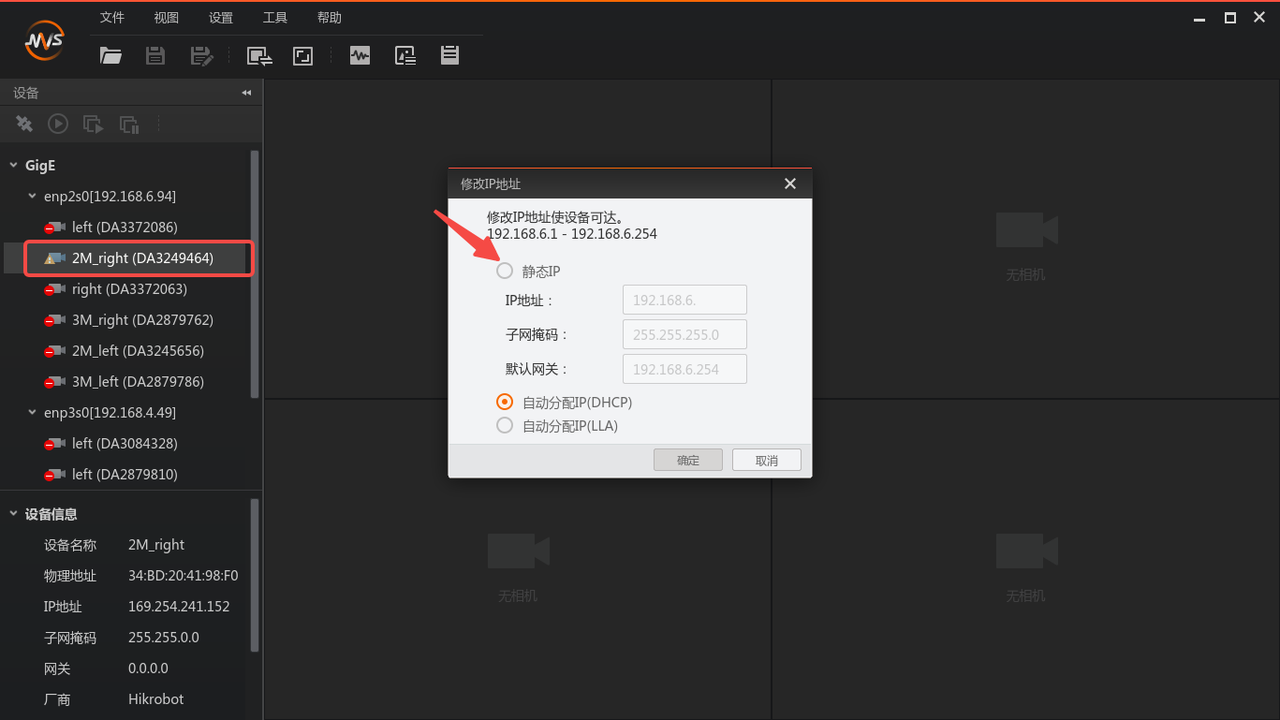
在MVS左侧查看相机列表,双击想连接的相机,若不可连接,则修改IP,相机IP需修改为与工控机同一网段
若相机直连工控机,建议设置电脑 IP 为静态 IP,后在 MVS 中设置相机 IP 为同网段静态 IP。
若想设置自动获取,则先需要修改为静态IP(可连接状态),连接后再次修改IP为"自动分配IP(DHCP)"即可
此处需记录相机的序列号,若相机名称为2M_right(DA3249464),则序列号为DA3249464,后面有用
MVS相机配置修改
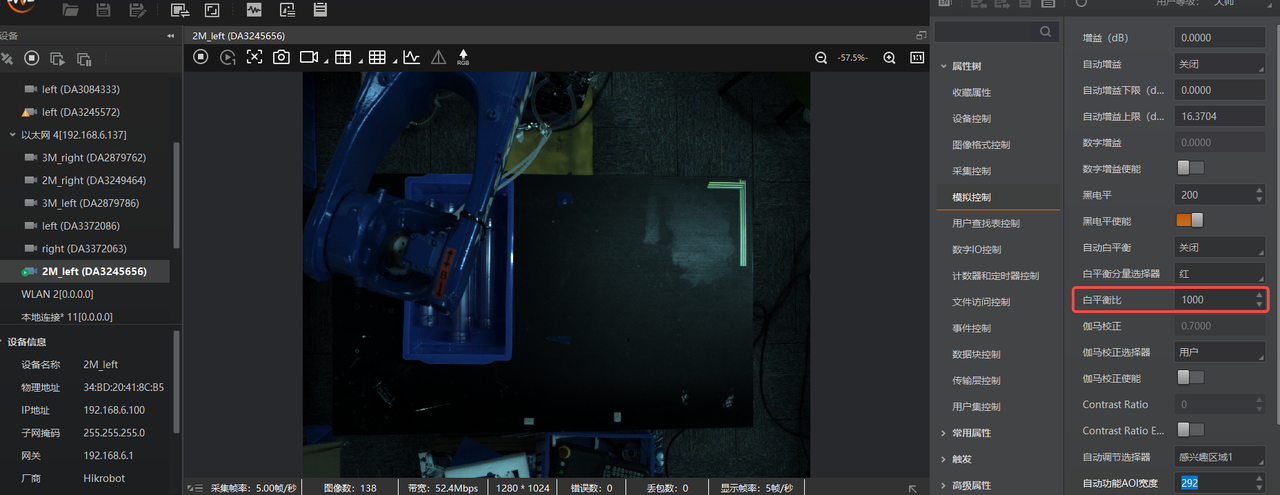
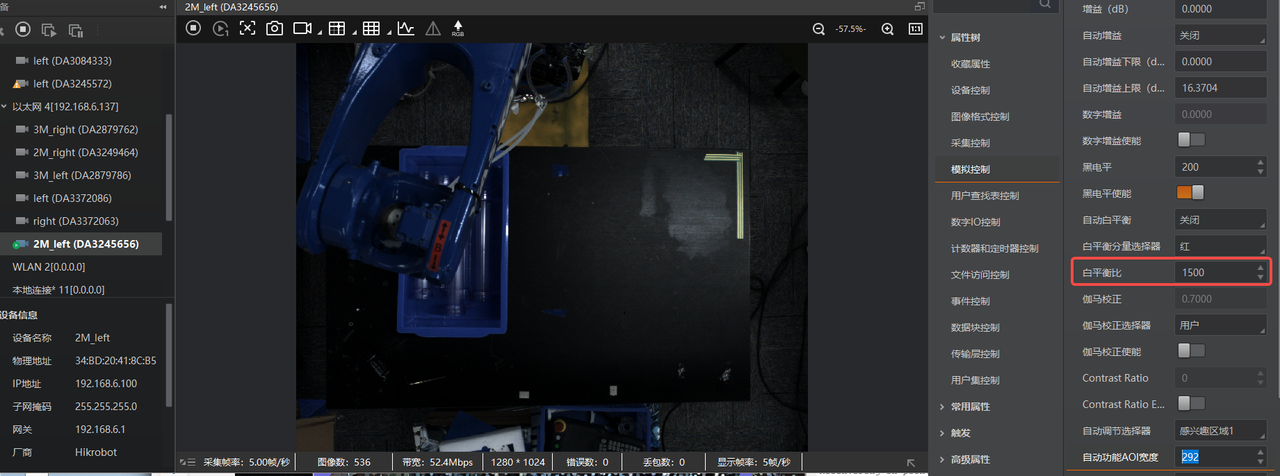
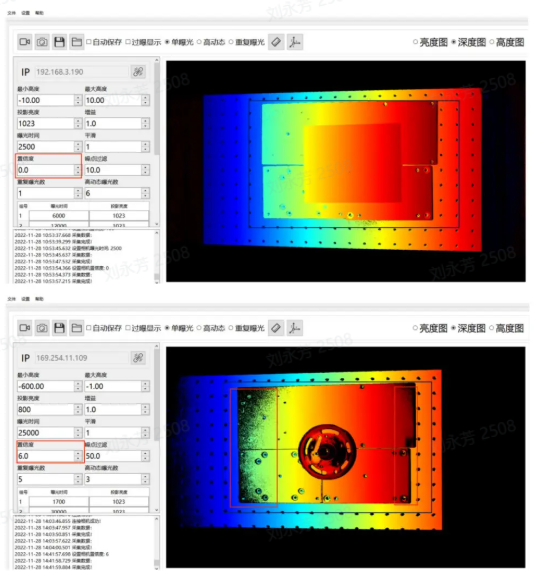
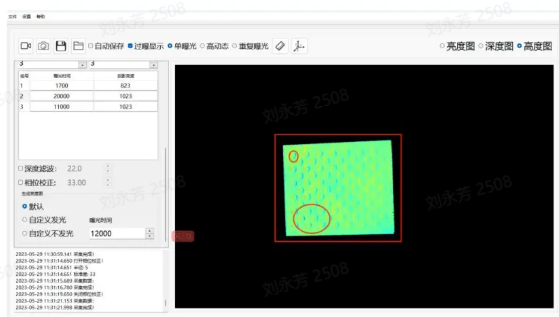
关闭自动白平衡(色0调,建议两个相机的平衡比填写一致)
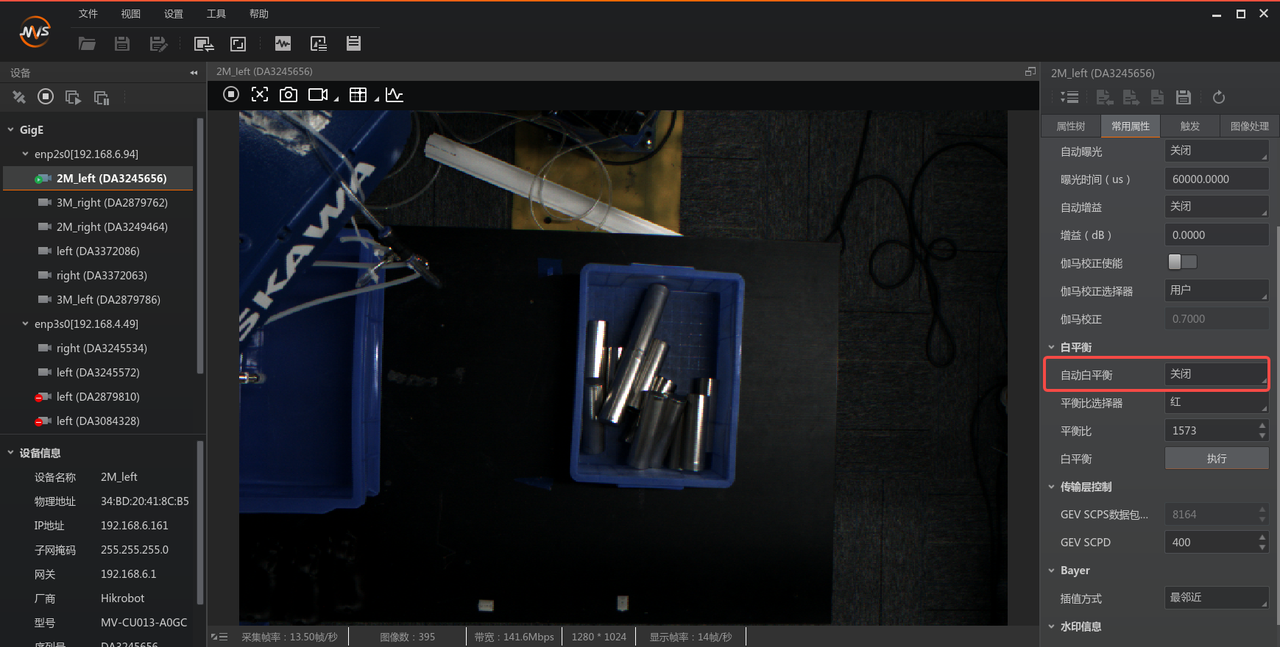
若相机白平衡数值不同,则画面色调会不一致,如下方两张图所示。
正常显示效果推荐:
“白平衡”数值填写为1500。PS:高分辨率色调偏冷,可填写1800,总之与人眼观感一致即可。
“白平衡分量选择器”选择“红”。
自动曝光AOI设置
点击箭头所指向方框,点击“编辑”,绘制AOI
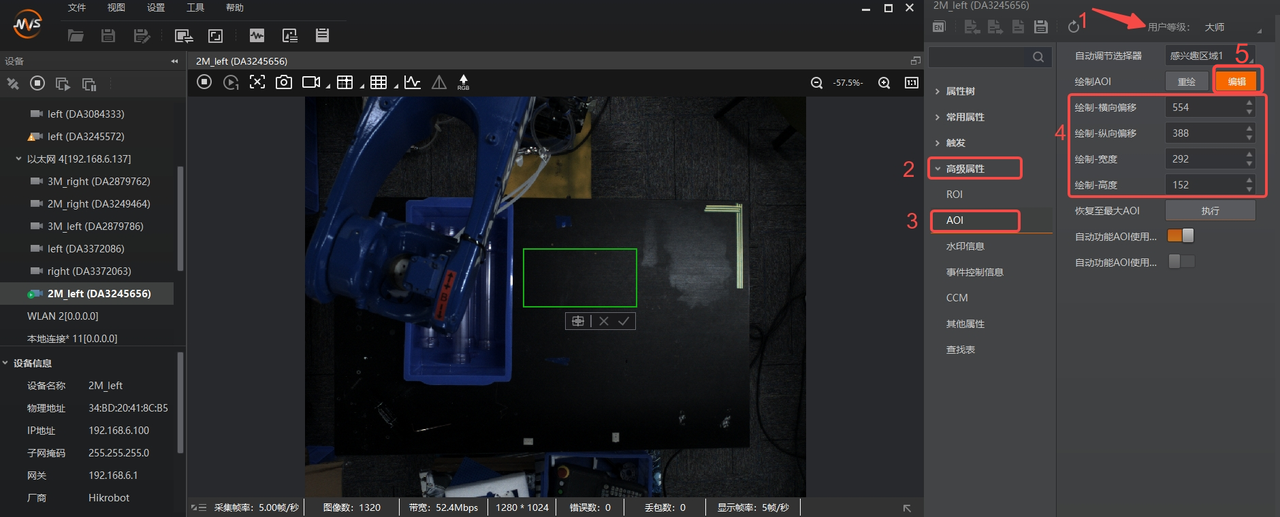
“自动曝光AOI”意为仅关心AOI内的曝光情况,使得框内的纹理清晰,但自动曝光值是全局的,也就存在可能“关心的部分”清晰了,其余地方都过曝了的情况。
出现绿色方框
将鼠标放到绿色框中心点击可拖拽AOI区域
将鼠标放到绿色框线上可拉伸AOI区域
完成绘制AOI后,记录AOI方框数据,并打开"自动功能AOI使用强度"如下图
AOI方框数据有:横向偏移、竖向偏移、宽度和高度,需手动填写至Pickwiz软件相机参数中
在图像预览框内,右键,点击"完成",AOI配置结束
关闭MVS,断开相机连接
4.4 PickWiz配置并连接相机
PickWiz软件配置
导入模型
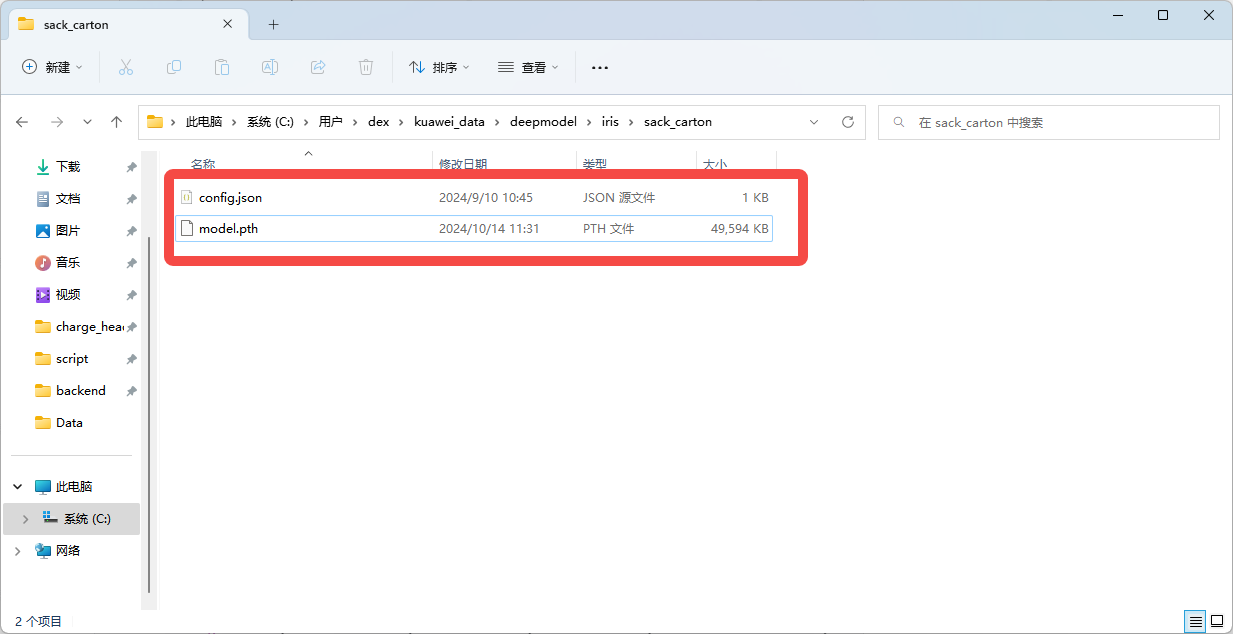
获取到双目模型pth文件后,在“kuaweidata/deepmodel/iris/sack_carton/”目录下,放入pth文件并重命名为model.pth,获取途径查看 双目windows PickWiz部署(应用向)(内部)3.3章节
打开软件进行连接及参数配置
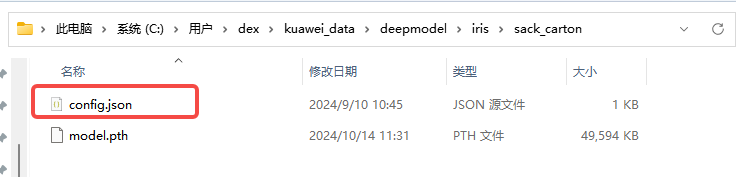
config.json配置:路径如下图,若不存在则新建同名文件,着重修改max_disp参数
{//内容解析 "matcher_type": "pth",//模型类型,“pth”或“trt” "max_disp": 256,//视差值, //视差计算公式disp = fx * baseline / distance "igev_refine_iters": 32,//迭代次数 "scale_x": 1.0,//2D图像x方向的放缩比 "scale_y": 1.0,//2D图像y方向的放缩比 "rectify_enlarge": false,//是否恢复全局视野 "roi_delta_x": 0//x方向的roi2d窗口偏移 }
max_disp参数需要着重设置,使用公式计算,过大会引入噪声,过小会导致视差预测错误。max_disp意为最大的视差,即工作距离最大和最小距离分别计算一次取最大值即可。
计算公式:disp = 基线长度 * 相机内参fx / 距物体的距离
连接
双目配置勾选,没有则按“+”号新建
左目右目可设置不同的相机参数
内外参配置导入参考 双目windows PickWiz部署(应用向)3.3章节
高分辨率先设置缩放比为0.33(3036*4024),防止全图推理爆显存,低分辨率(1024.1280)无需修改

参数介绍以及配置(较长,建议全部浏览)
4.5 下载内外参标定文件
内外参标定文件是跨维相机的出厂配置文件,用于说明左右目相机的相对关系
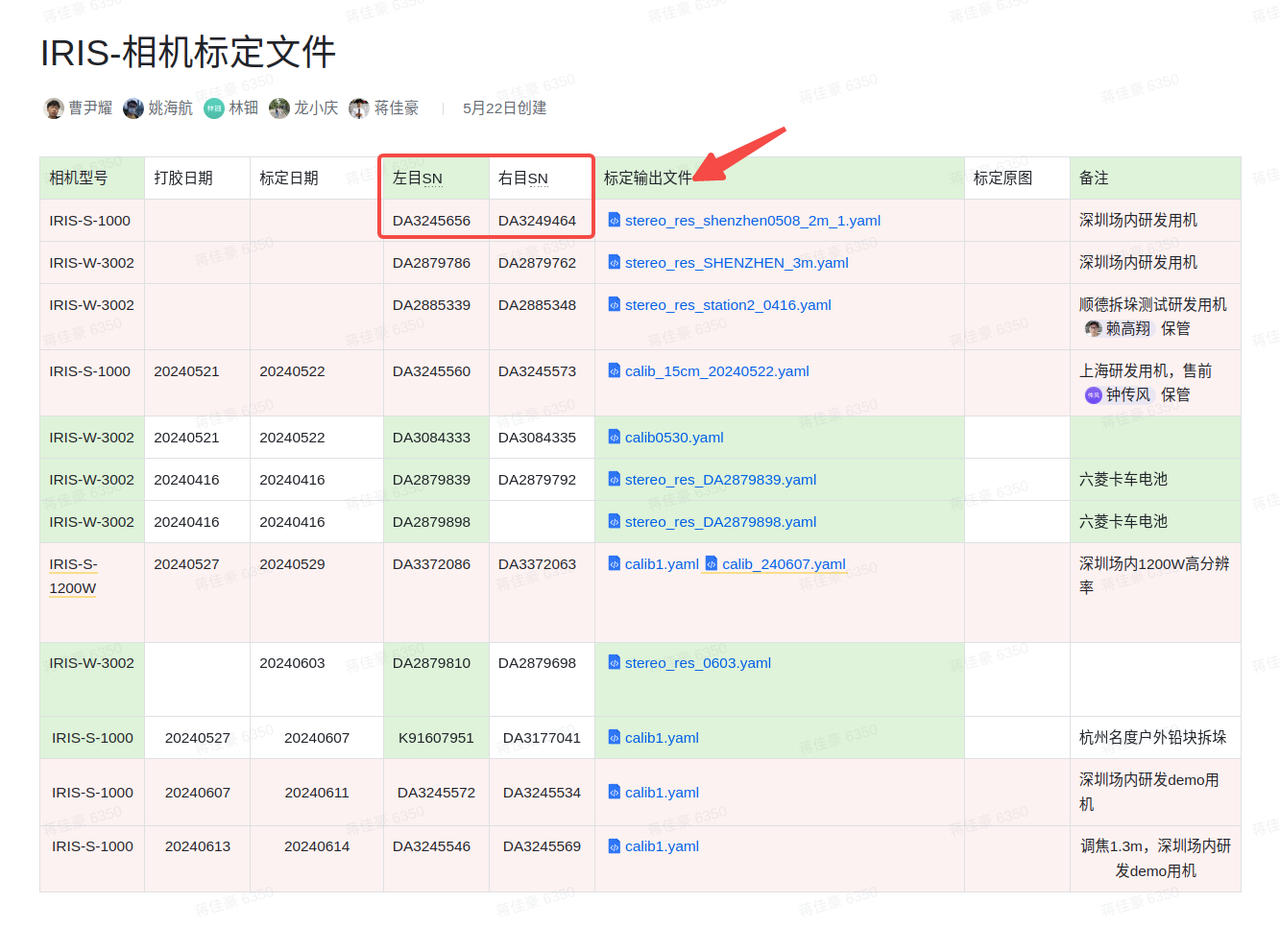
根据相机型号和序列号(左右目SN)找到对应的内外参标定文件 KINGFISHER-相机标定文件,如下图所示,下载最新版本的标定文件。
若查询不到对应的标定文件,可找 确认
获取相机内外参标定文件
在此链接下查询步骤a所记录的相机序列号 KINGFISHER-相机标定文件
对照左右目SN号(序列号),下载对应的标定文件。PS:若查询不到对应的标定文件,可找 确认
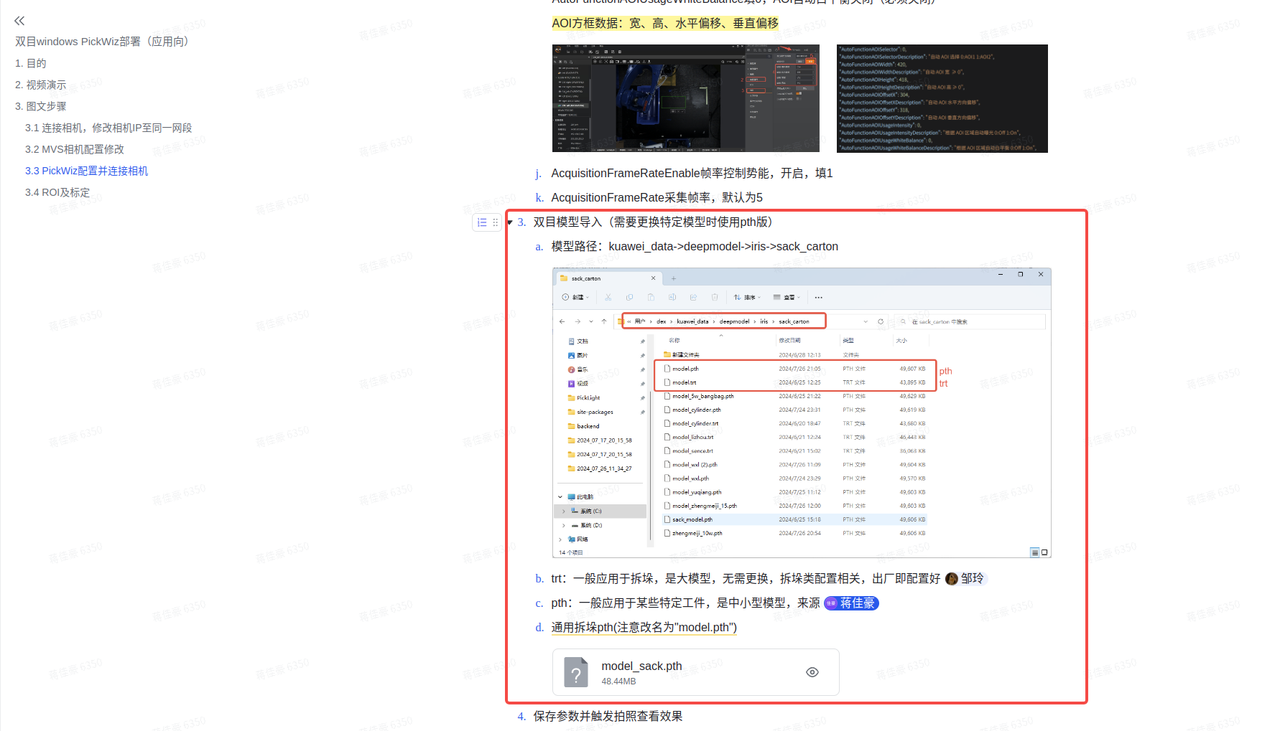
双目模型导入(使用pth版)
- 模型路径:kuawei_data->deepmodel->iris->sack_carton,没有此路径需手动新建
~~trt:一般应用于拆垛,是大模型,无需更换,拆垛类配置相关,出厂即配置好 ~~
pth:来源
通用拆垛pth(注意改名为"model.pth")
配置双目模型参数config.json
1.4.2版本以后,将“config.json”文件连同“model.pth”一起放进sack_carton文件夹中,填入以下内容并适当修改,注意:max_disp参数需要着重设置,使用公式计算,过大会引入噪声,过小会导致视差预测错误。max_disp意为最大的视差,即工作距离最大和最小距离分别计算一次取最大值即可。随后看看计算出的视差值小于256、384还是512,填写"max_disp"参数即可。
计算公式:disp = 基线长度 * 相机内参fx / 距物体的距离
注:基线长度,KingFisher-S-1000为0.15,KingFisher-W-3002为0.40.
低分辨率的fx一般为1275左右,高分辨率则根据缩放比计算大约为3000*scale.
保存参数并触发拍照查看效果
注意:左右目参数除AOI以外最好保持一致,范围要求不严格时AOI也可以一致,查看左右目拍照取图效果和风格是否一致,若发生偏色,则可能是自动白平衡未关闭,或者相机在关闭自动白平衡之前已记录该数值,这时需要进入MVS重新填写白平衡比数值。
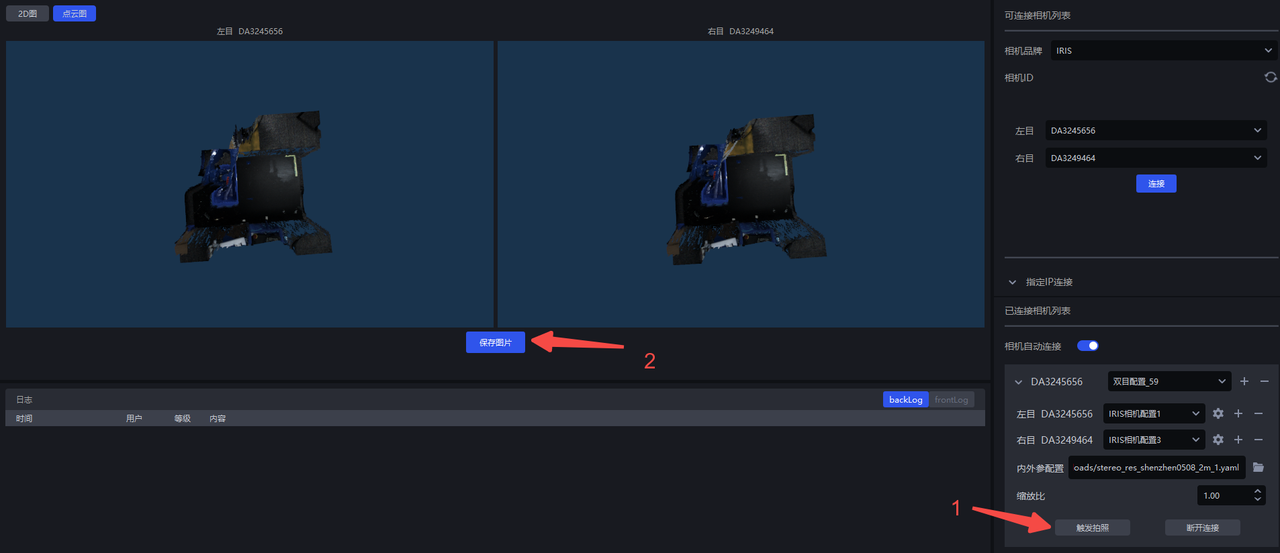
当场内需要双目数据验证时,可直接拍照保存图片,发送”保存图片“的数据即可
检查相机是否正常(是否需要外参矫正)
该步骤是必要步骤,否则可能采集图像失败
在相机界面保存图片后,打开保存的文件夹
找到rect.bmp,查看左右目两图中,红线是否穿过同一个点,正常的情况如下:可以看到红线穿过了实际场景中的同一个点,证明相机的外参正确;否则需要进行外参矫正(具体步骤参阅ROI及手眼标定)。

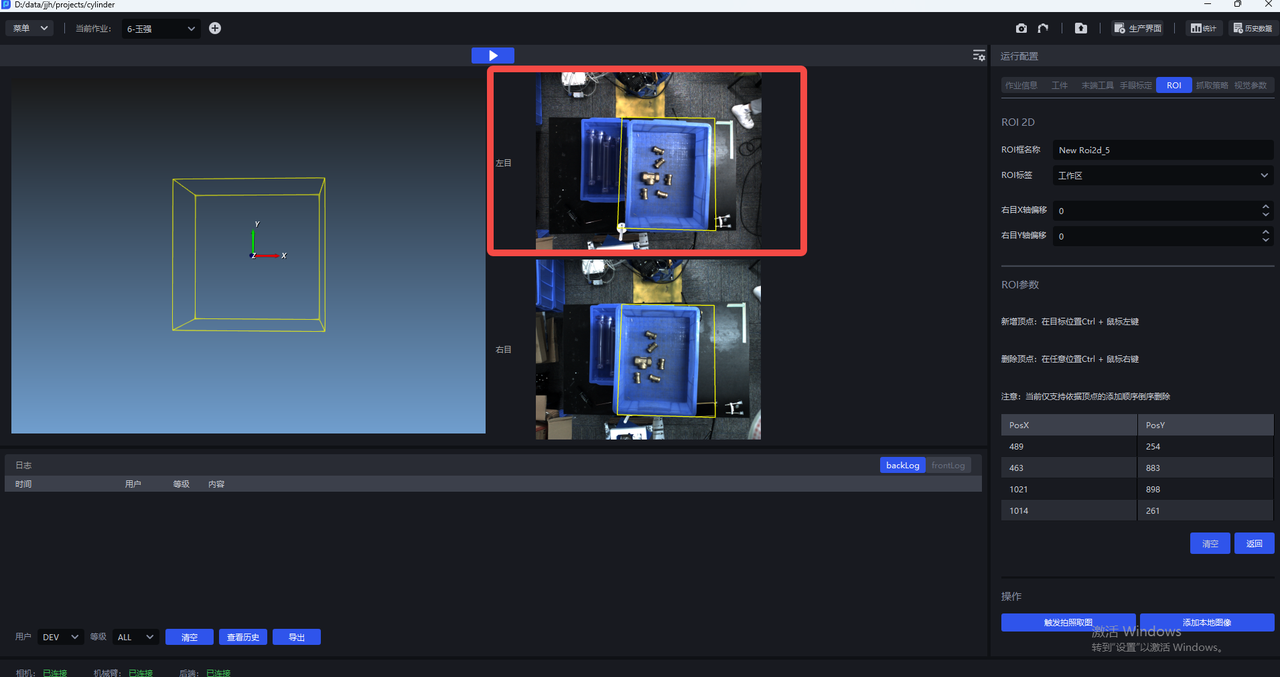
4.6 ROI
ROI设置
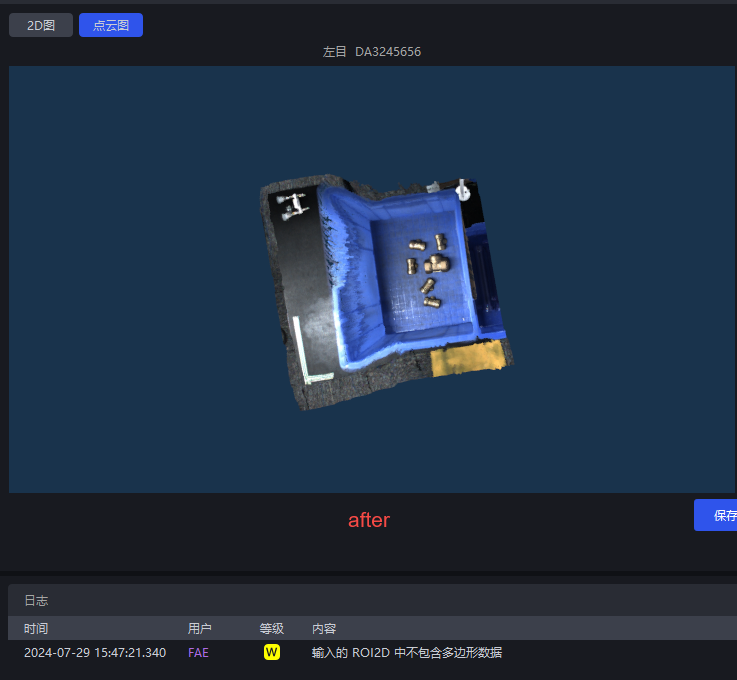
识别为导向的ROI2D以左目为主(工作区)
点云裁切ROI2D(观察区)
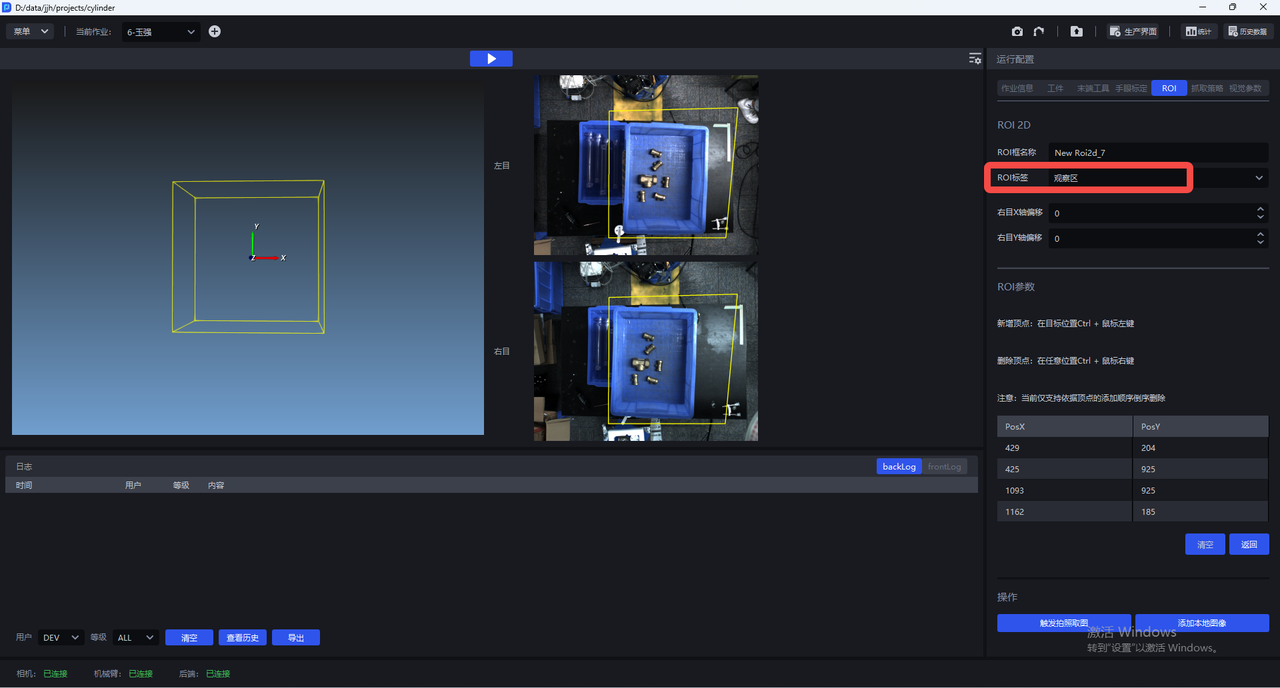
设置完成后仅生成ROI范围内的点云,可提升节拍,去除其他点云干扰,PS:也可能存在设置ROI后点云质量不达标的情况,都要结合实际考虑
4.7 手眼标定
关于手眼标定操作流程请查阅手眼标定相关说明
相机连接完成后,需进行手眼标定,否则会影响采图效果
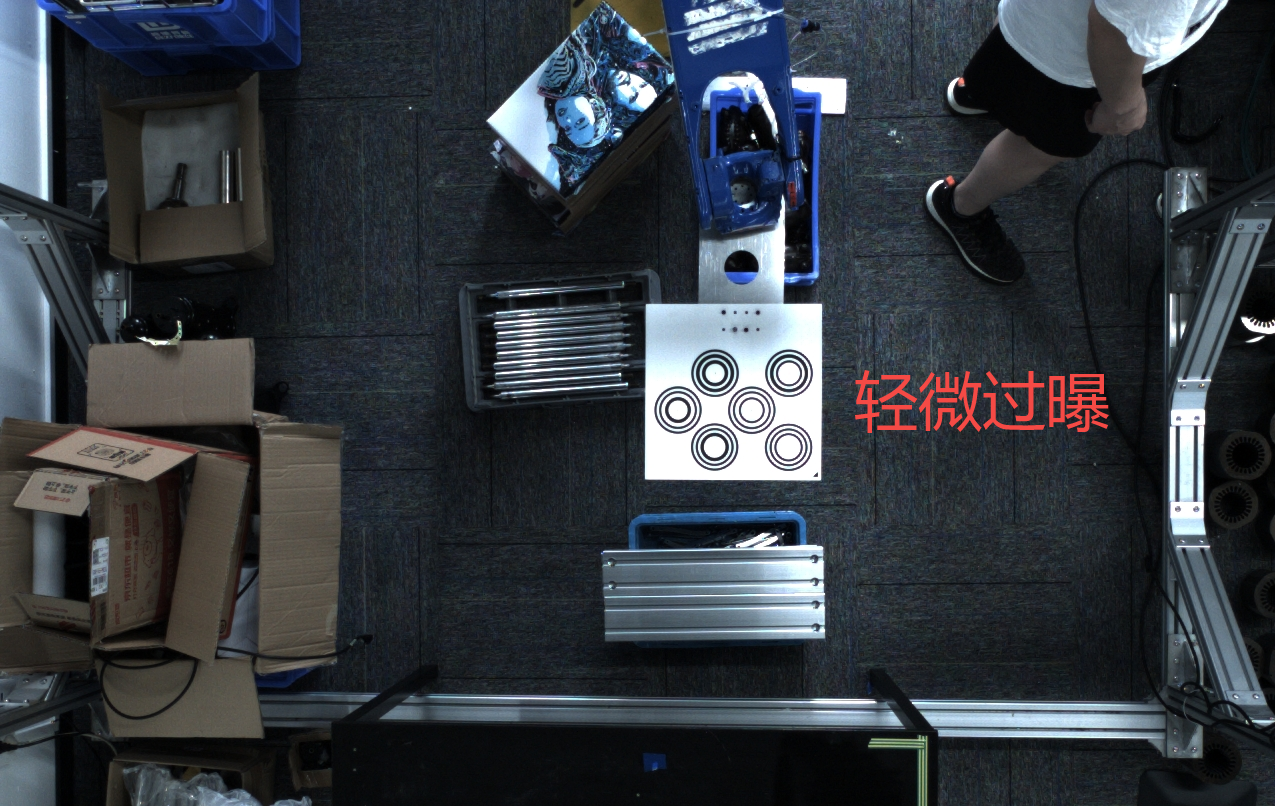
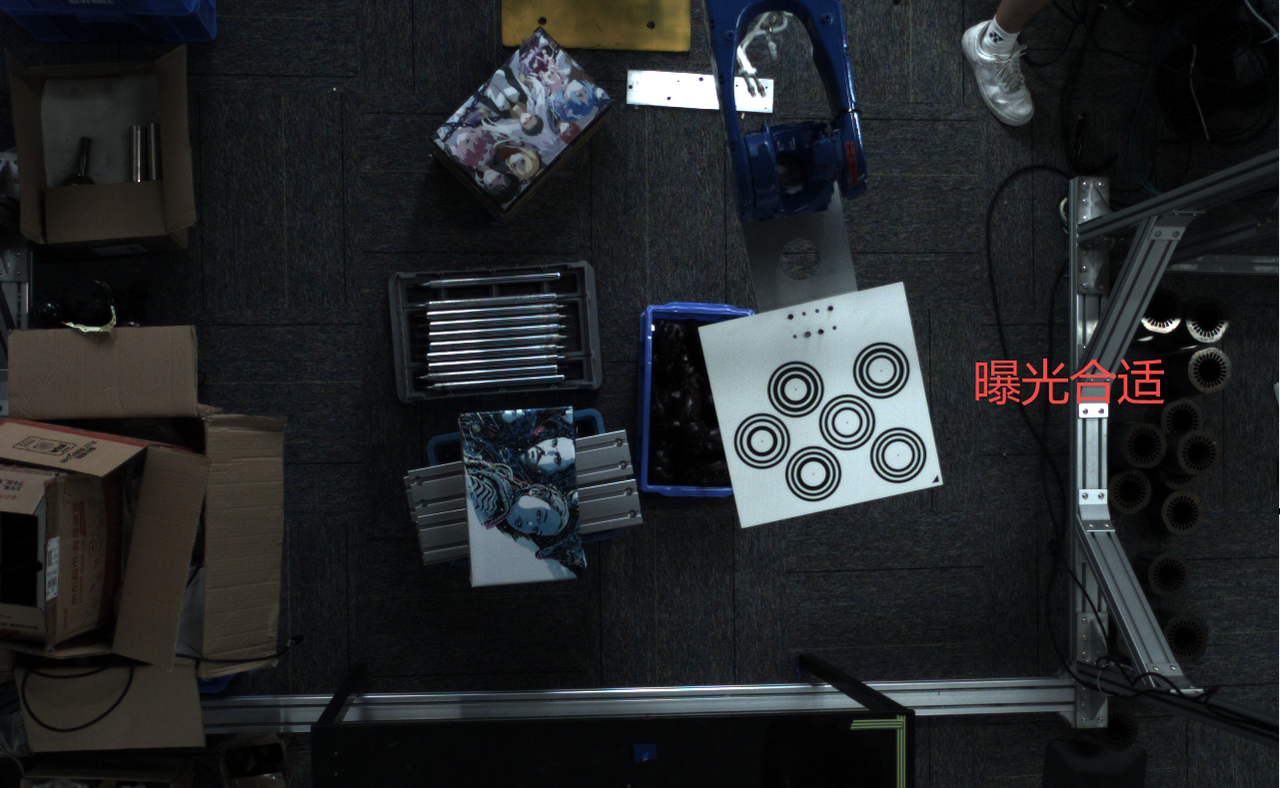
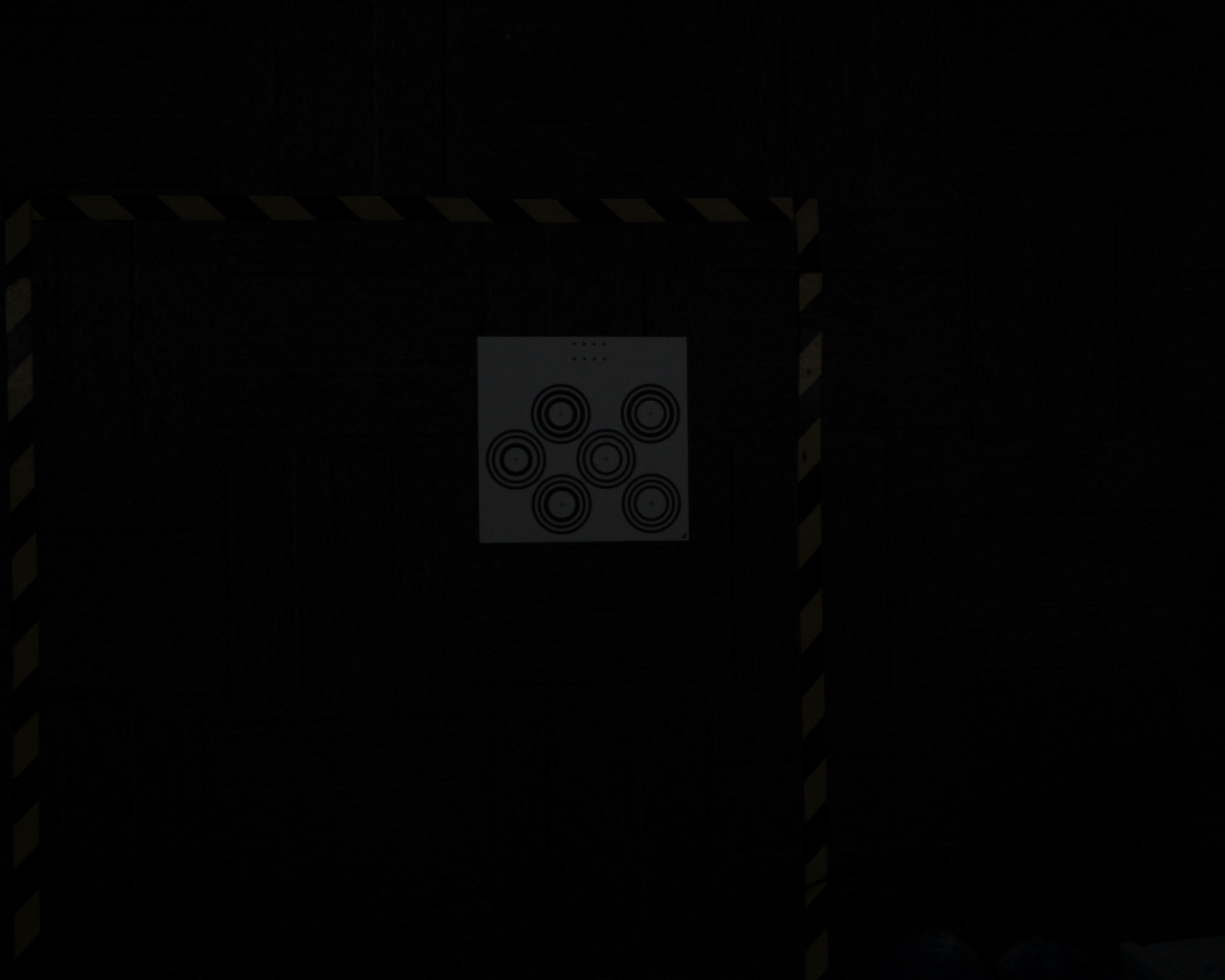
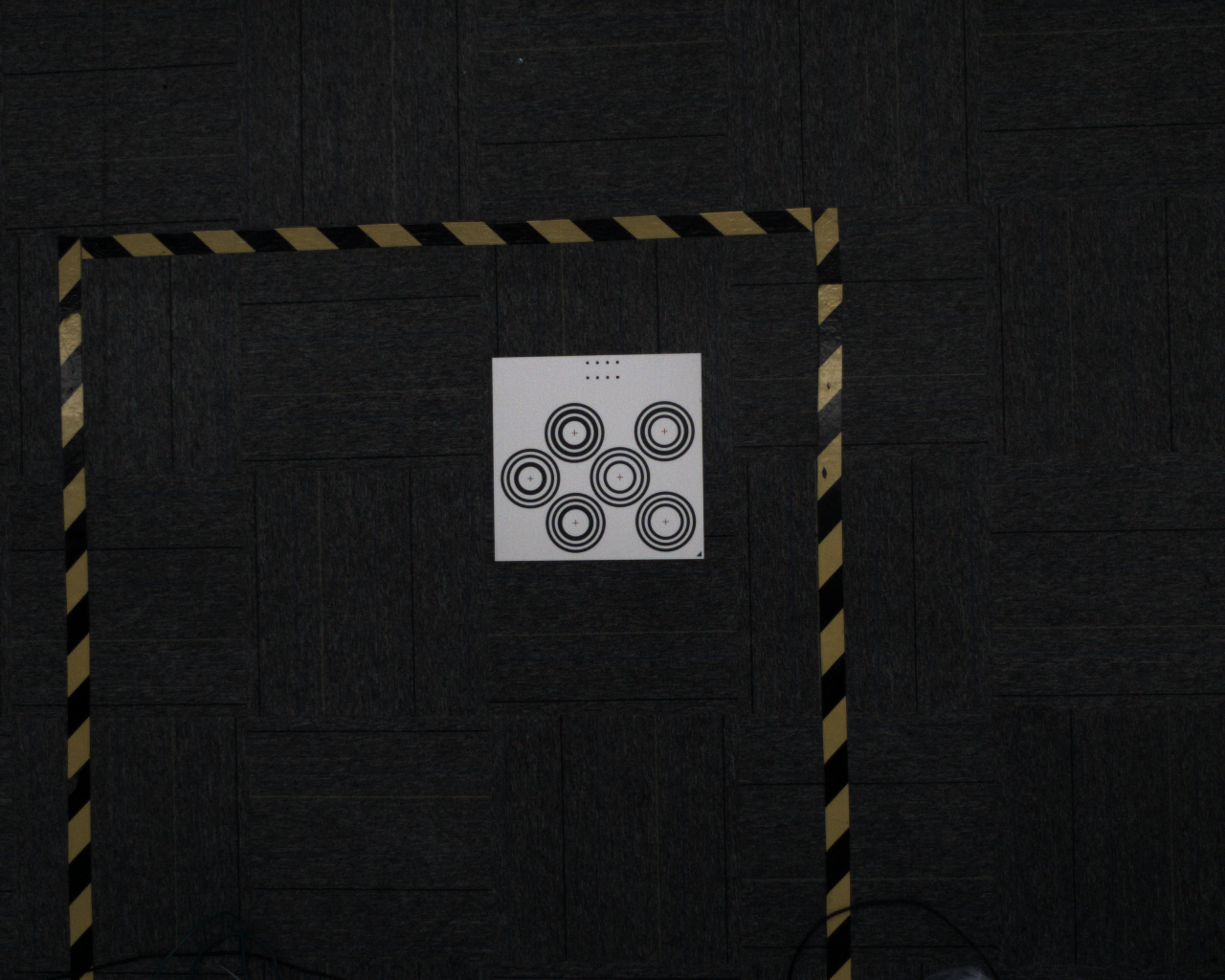
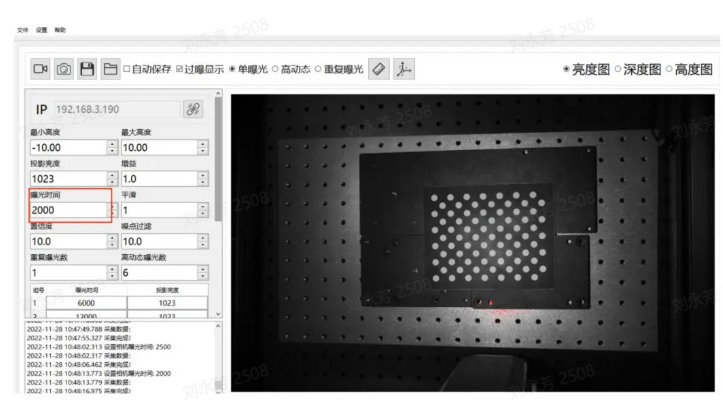
调整MVS软件的AOI属性为固定曝光
按照手眼标定流程相机采集图像
调整画面亮度到标定板不过曝,如下图(右)所示
外参矫正
若标定误差显示较小,但出现实际戳点有较大误差、点云形变等情况,确认排除人为操作因素后,查看相机拍照保存得到的红线图,确认是否是运输时相机结构发生改变导致,需进行内参矫正。
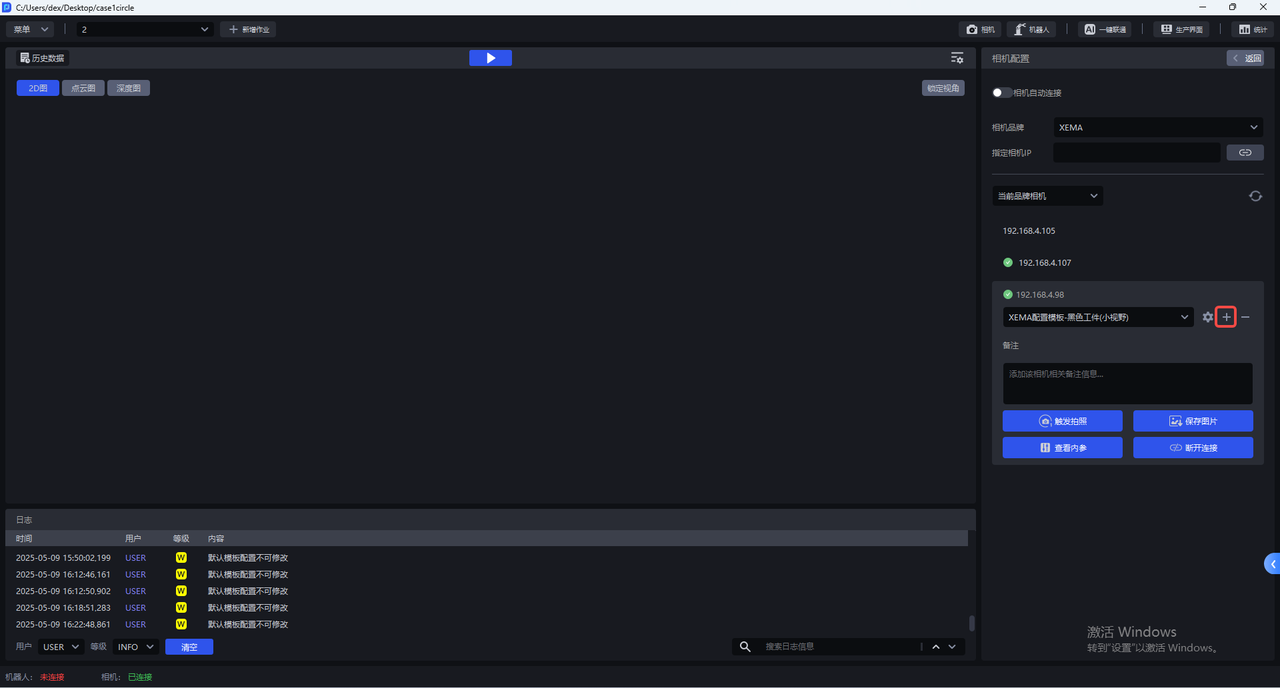
5. 相机配置
- 每个相机具有多个默认配置,所有默认配置不可更改。选择对应的默认配置,点击
触发拍照,使用成像参数拍摄2D图、点云图、深度图,可在左侧的可视化视窗查看成像质量。
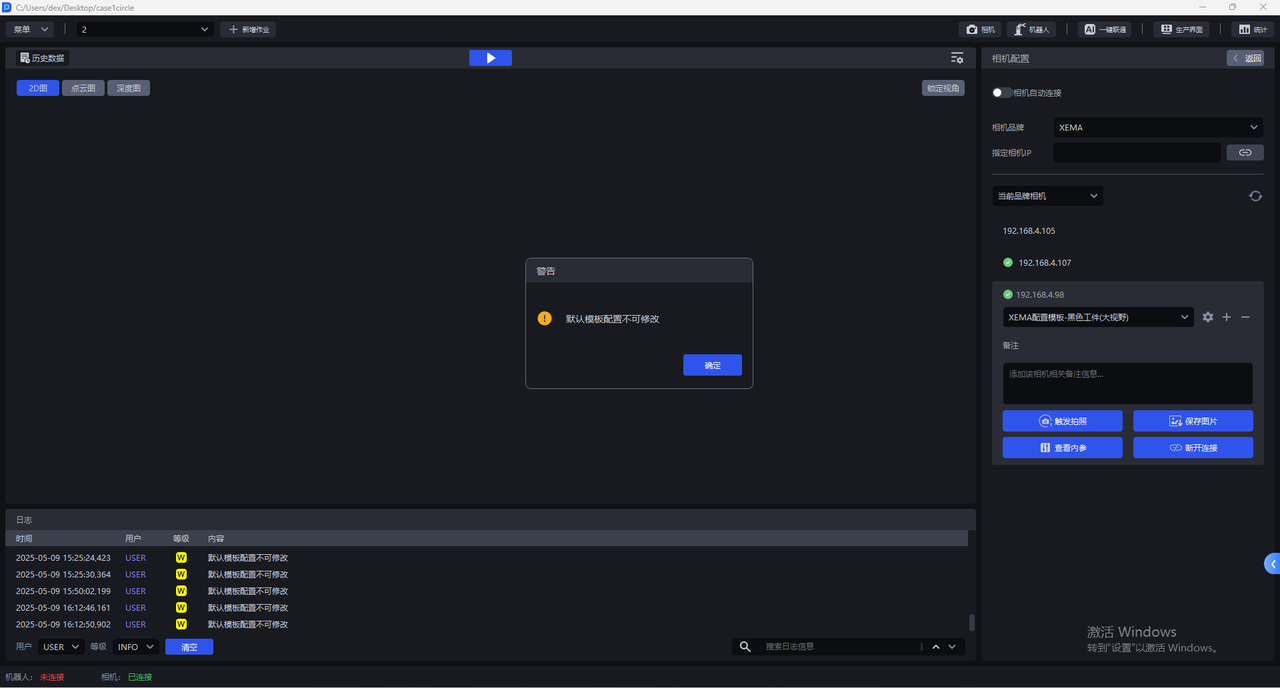
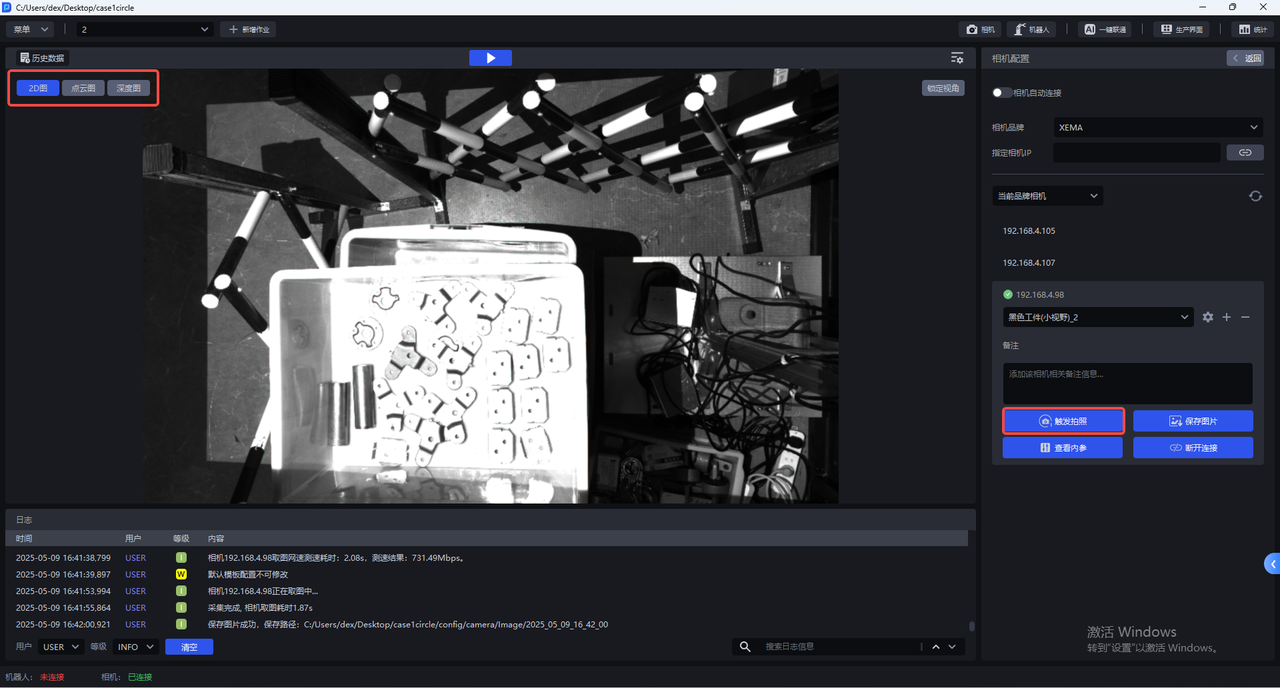
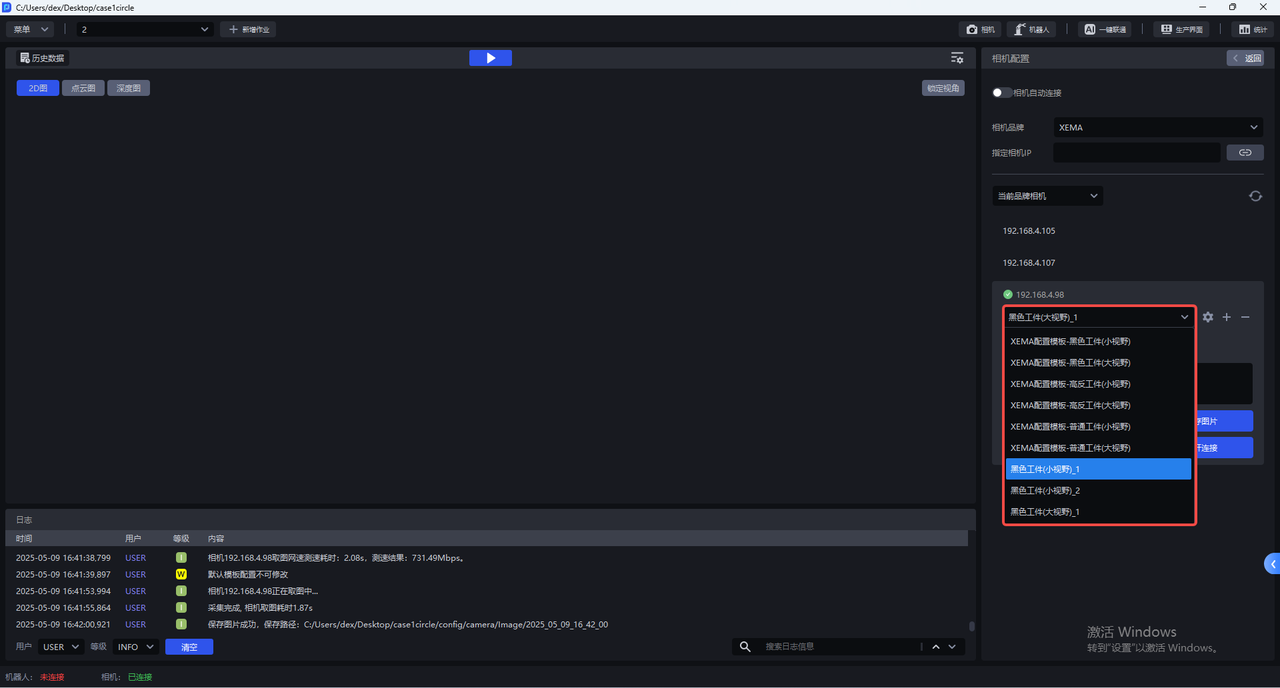
- 相机默认配置不可更改,若所有默认配置拍摄的2D图都无法达到曝光正常,可点击
+复制当前的相机默认配置,新增一个相同的相机配置,直接进入相机配置界面修改参数。
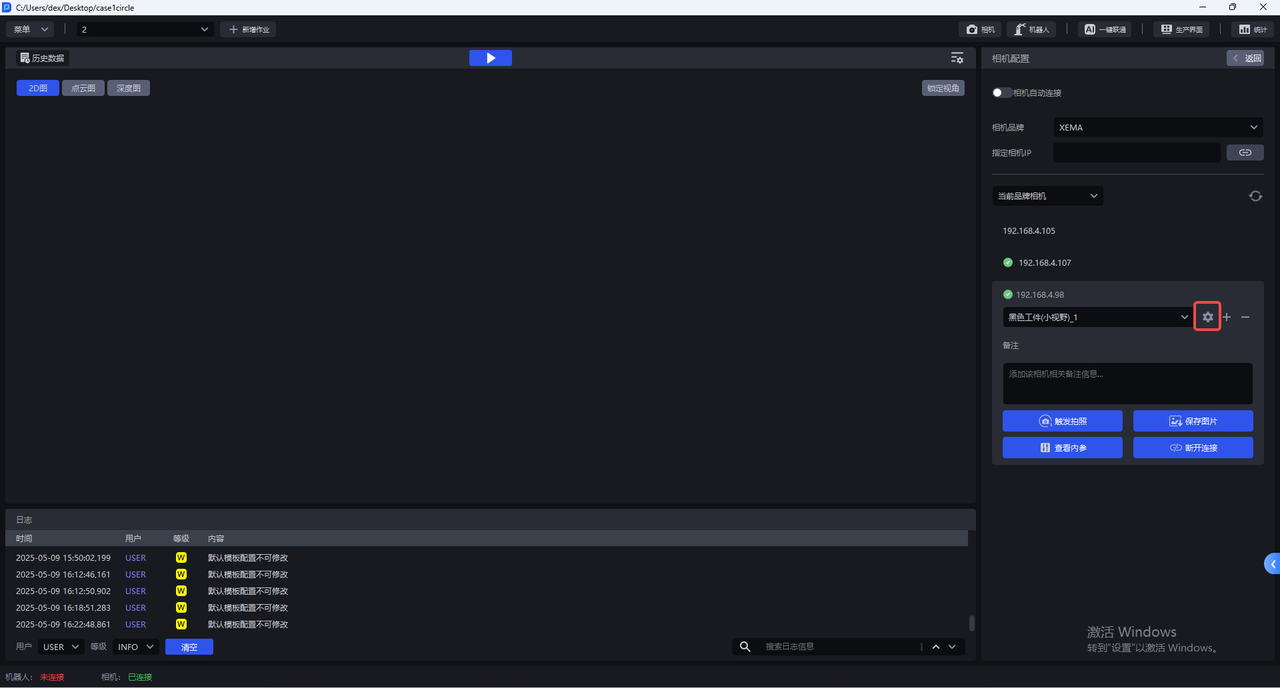
复制当前的相机默认配置后,可切换为新增的相机配置,点击设置按钮 ,进入相机配置界面修改参数。
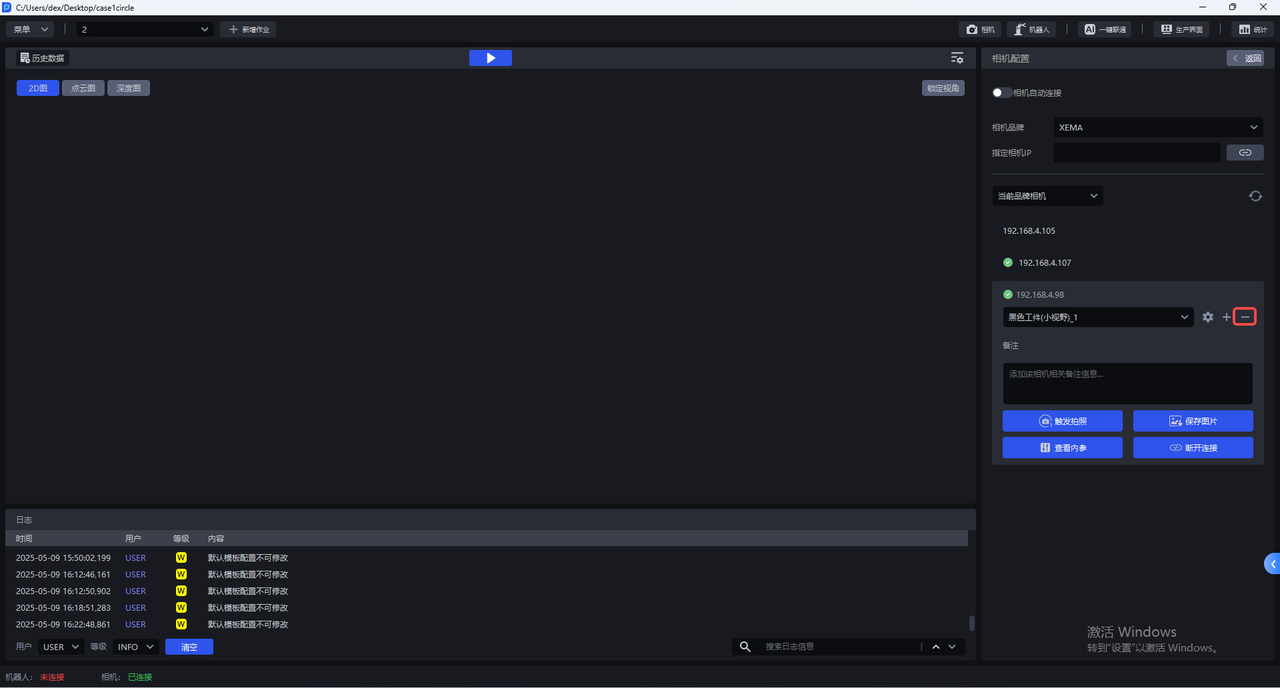
点击—,可删除新增的相机配置。
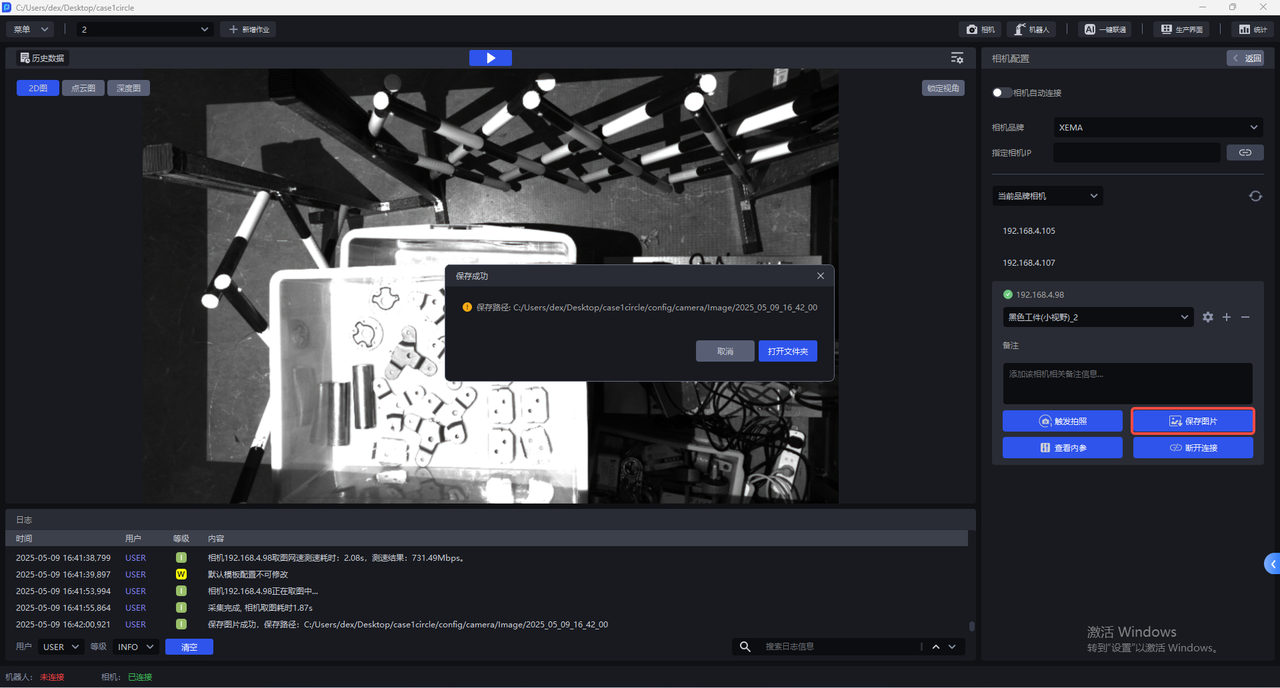
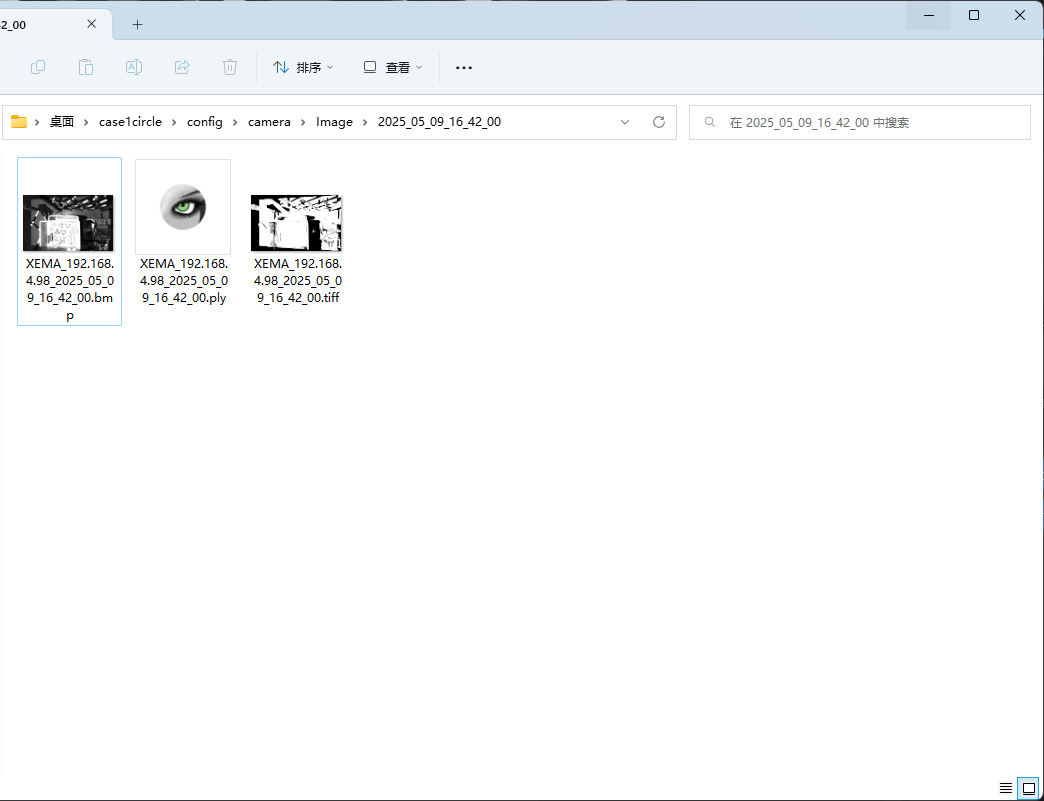
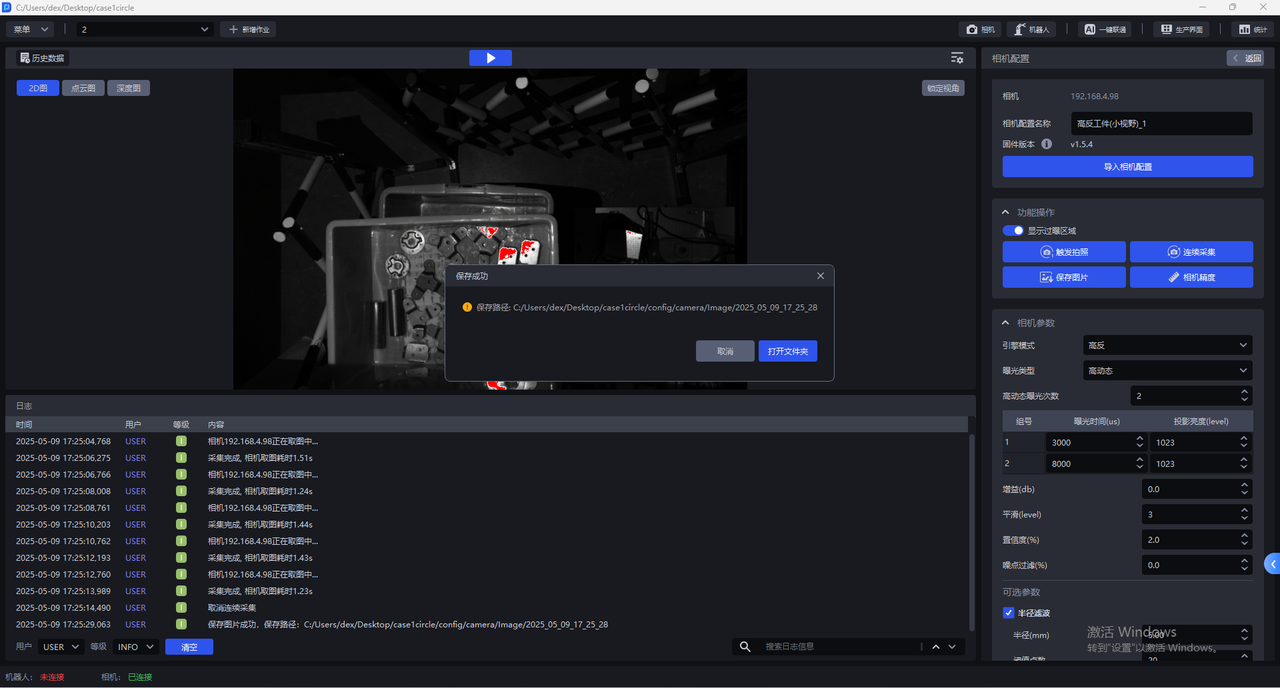
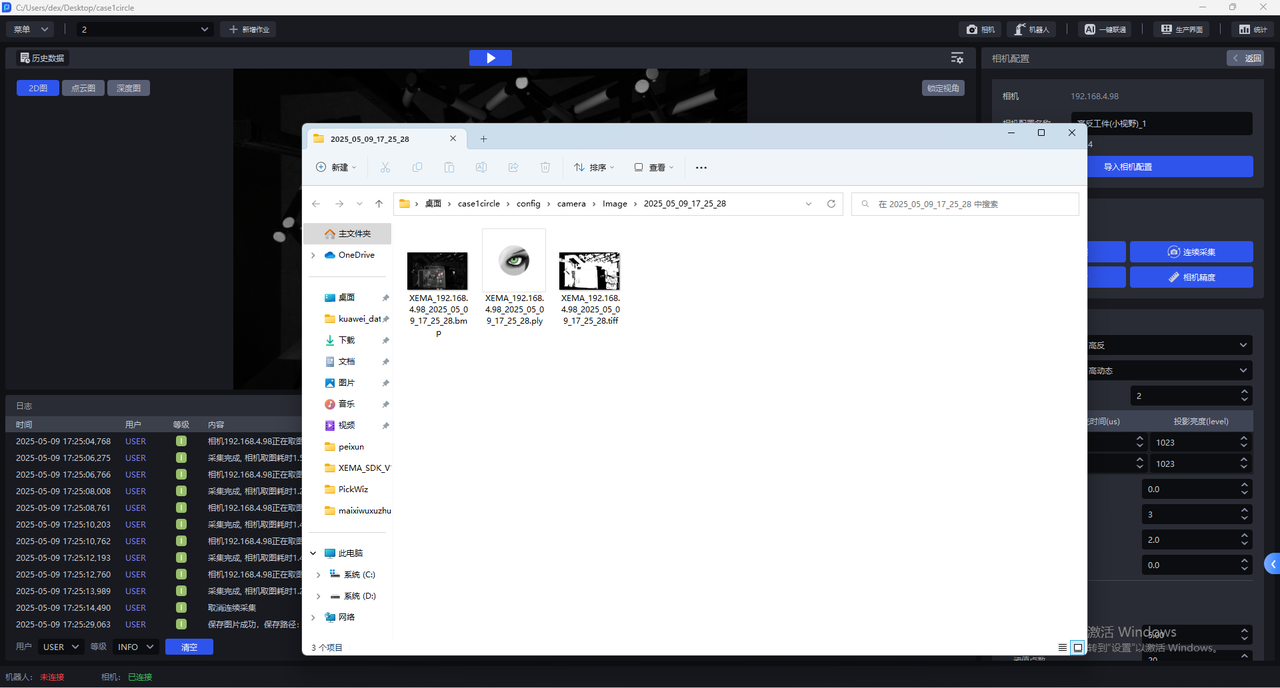
- 点击
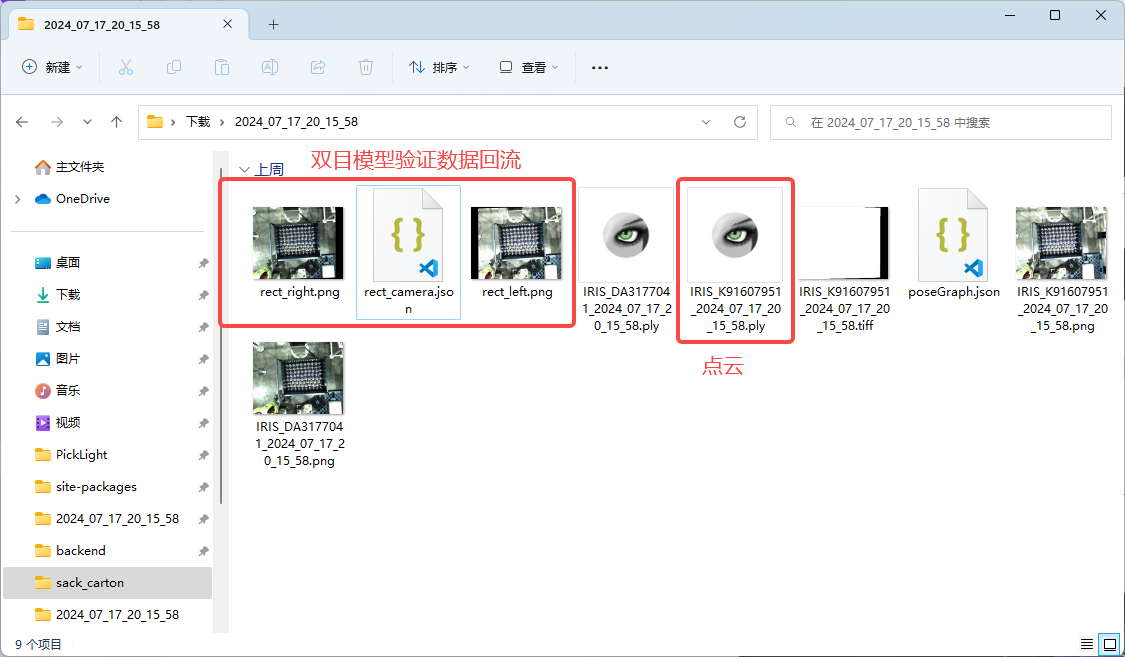
保存图片,可保存使用当前配置拍摄的2D图、点云图、深度图到本机,如下图所示,保存路径为项目文件夹/config/camera/image/拍摄时间,后缀名为bmp的是2D图、后缀名是ply的是点云图、后缀名是tiff的是深度图。
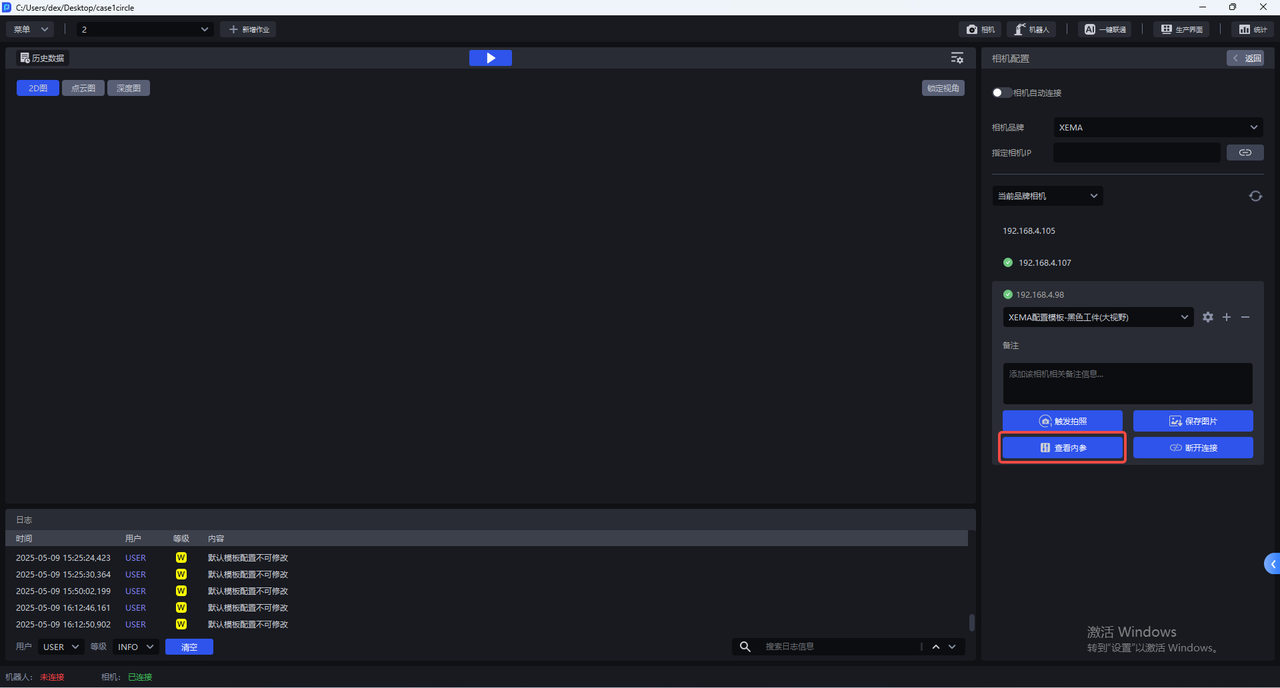
- 点击
查看内参,可查看相机内参,包括镜头焦距、主点坐标、畸变系数等。

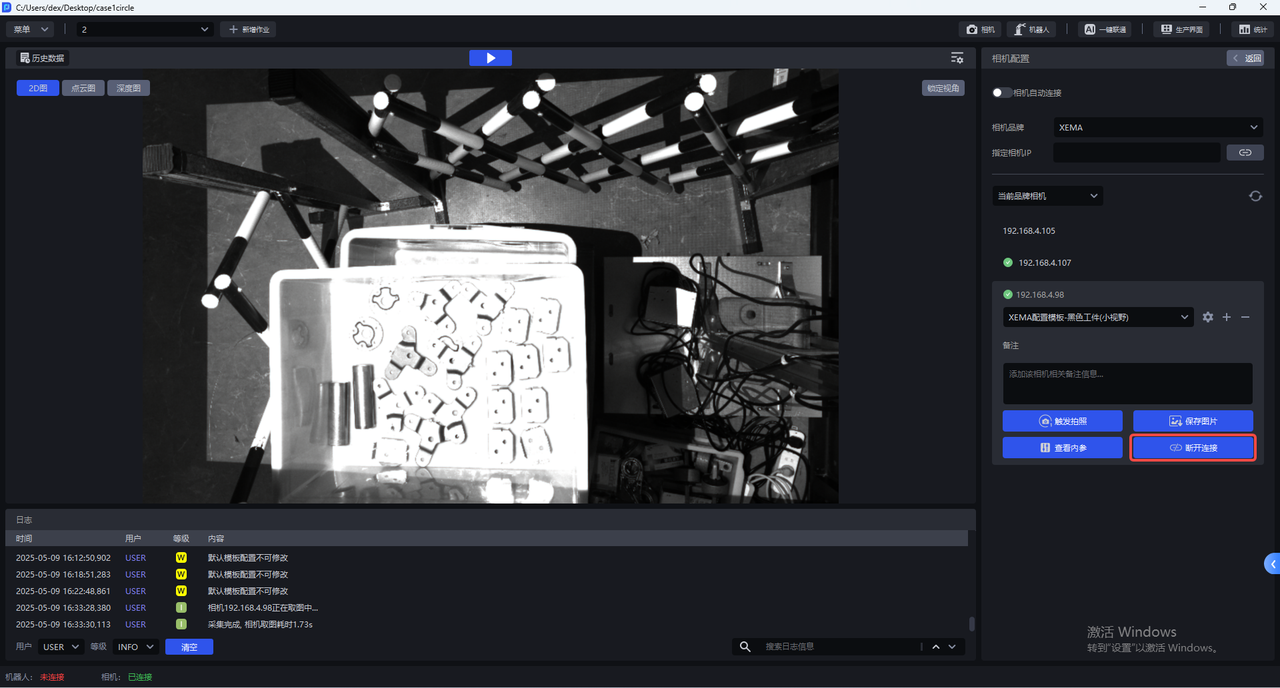
- 点击
断开连接可断开该相机的连接,重新选择相机连接。
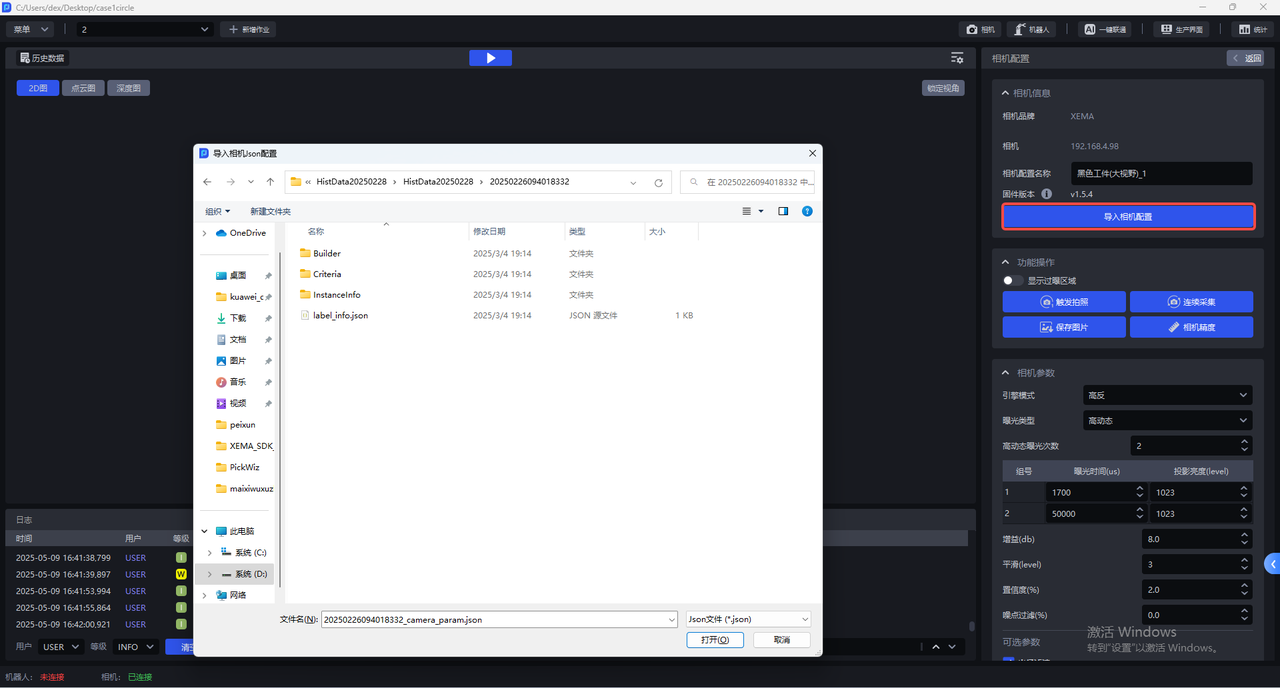
5.1 导入相机配置
进入相机配置界面,点击导入相机配置可将已有的相机配置导入相机。
5.2 功能操作
相机配置界面有如下功能操作:
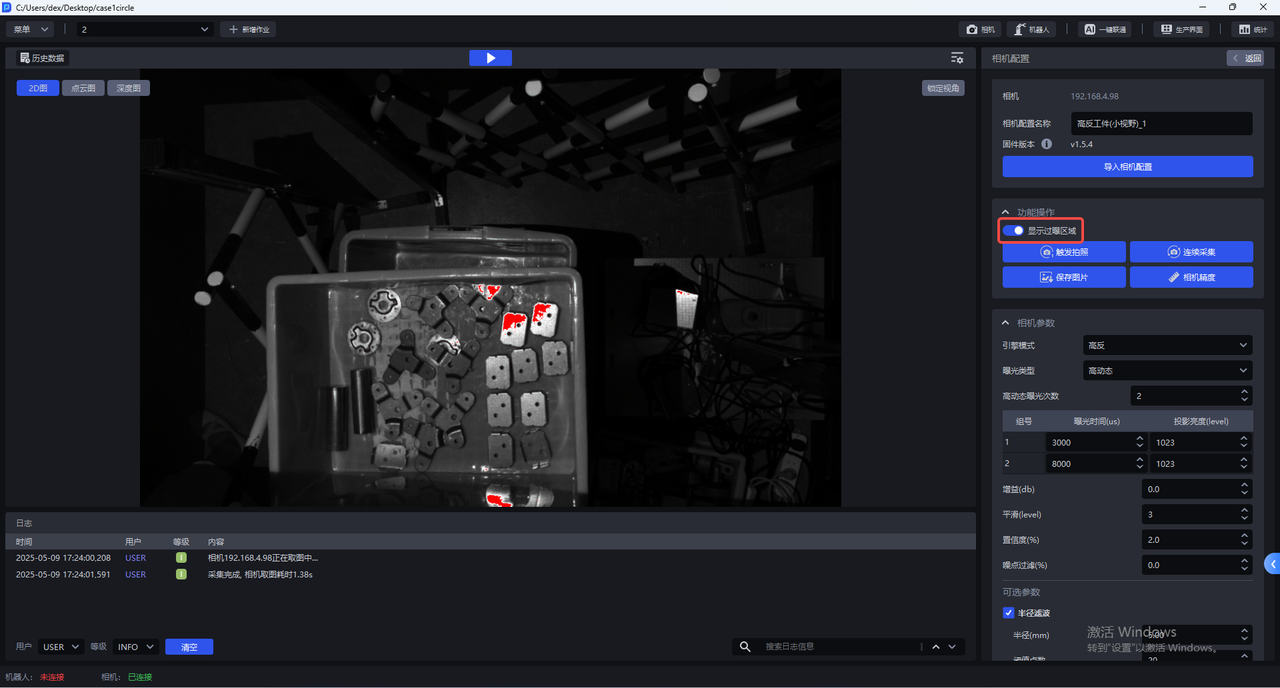
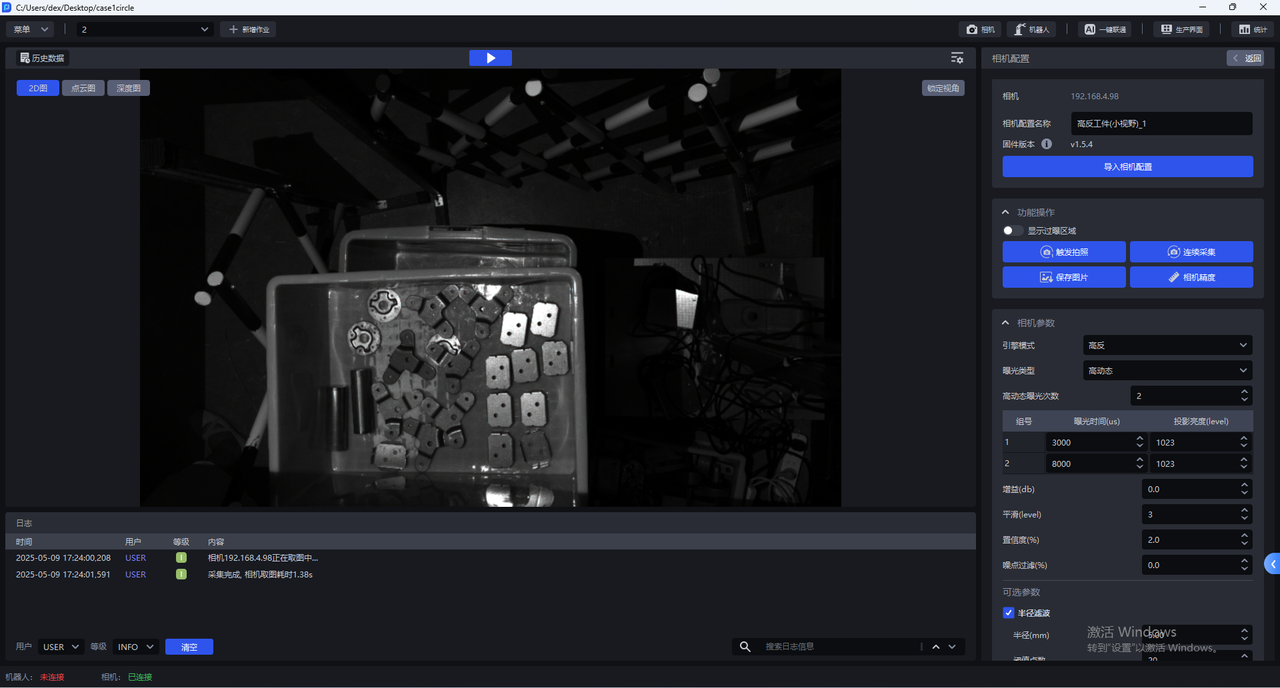
- 显示过曝区域
开启 显示过曝区域 后,可视化视窗将显示当前图像的过曝区域,如下图所示。
- 触发拍照
点击触发拍照,使用当前的相机配置拍摄2D图、点云图、深度图,可在可视化视窗查看当前相机配置的成像质量。
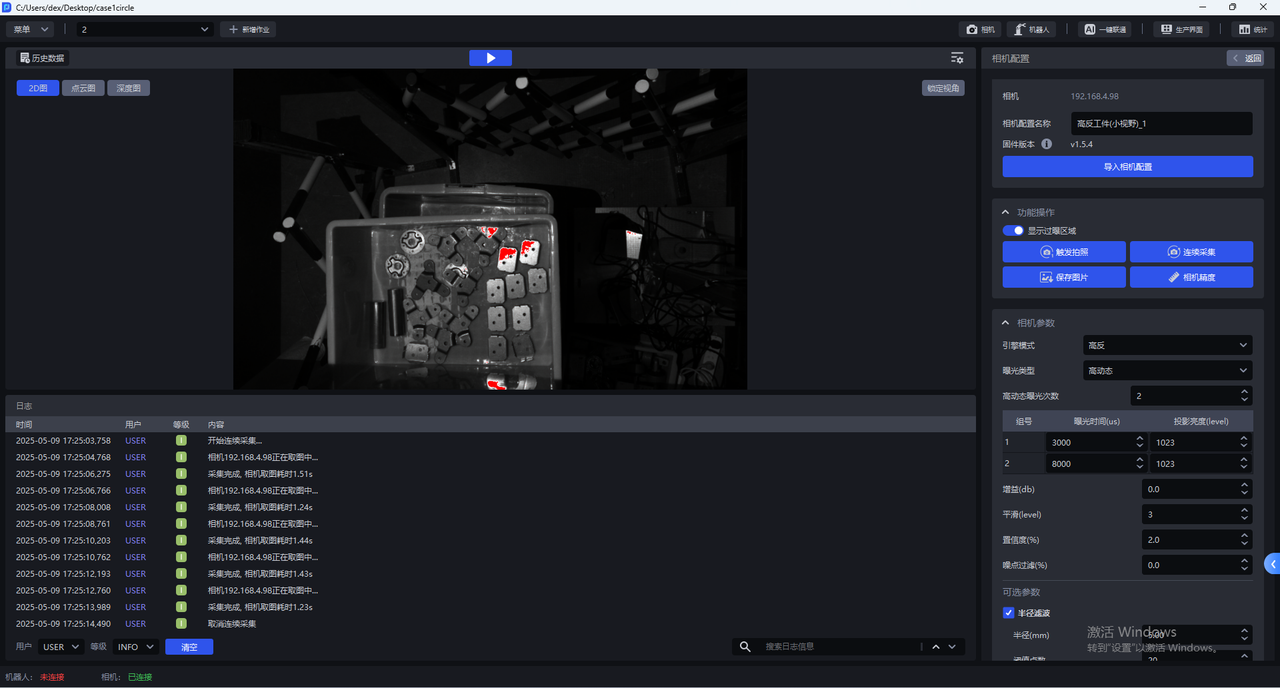
- 连续采集
点击连续采集,相机将连续拍照,点击取消采集才停止拍照
- 保存图片
点击保存图片,可保存拍摄的2D图、点云图、深度图
- 相机精度
点击相机精度,可查看和校验相机精度

5.3 相机精度
5.3.1 查看相机精度
- 将标定板放置在相机视野内,在相机配置界面点击
相机精度,会出现相机精度界面,如下图所示

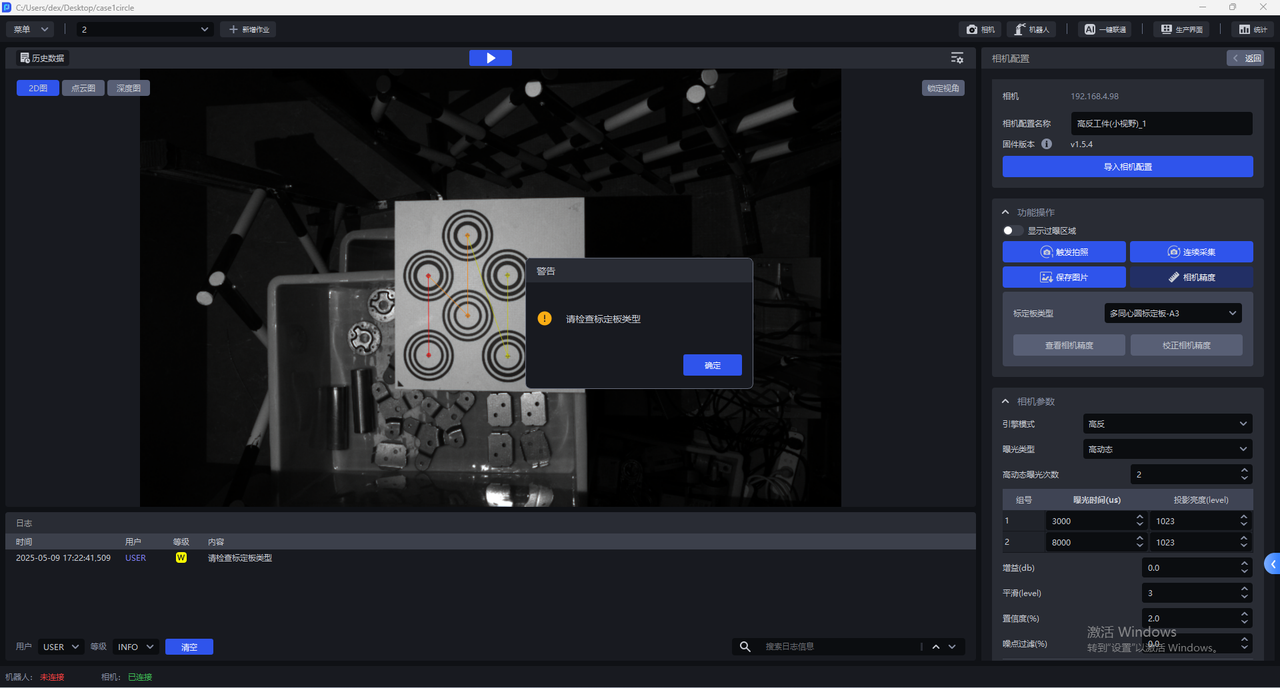
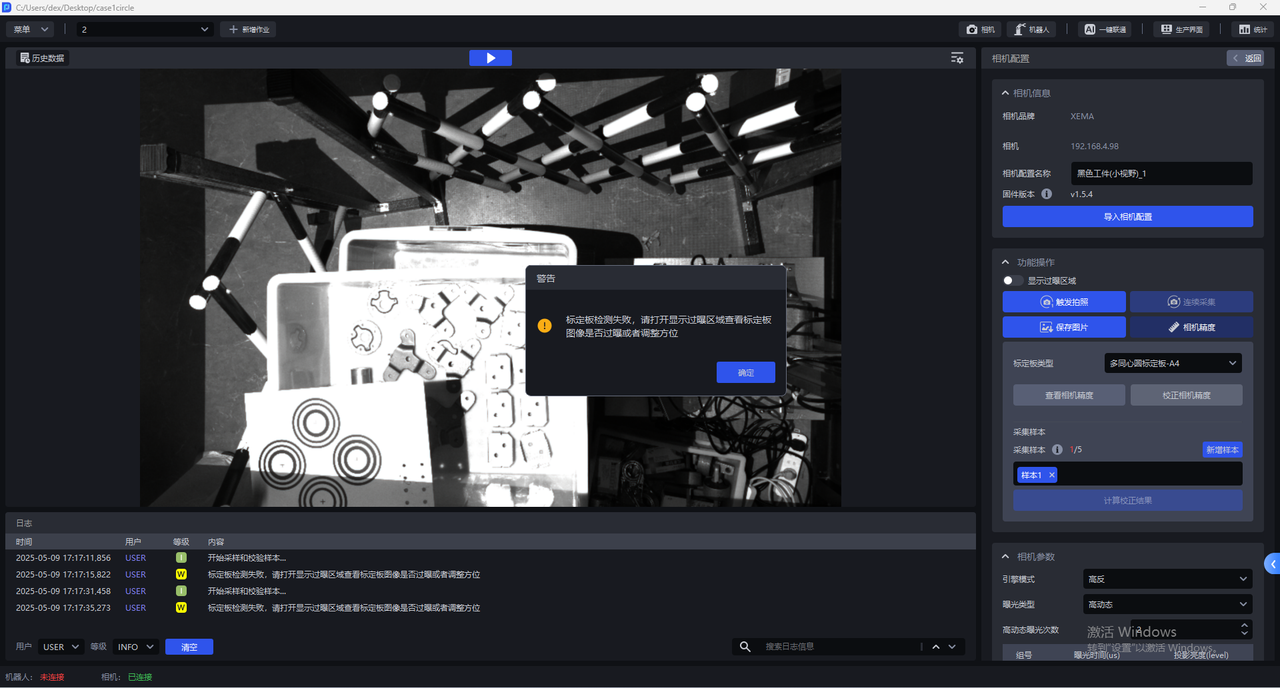
- 选择对应的标定板,若选择的标定板与实际不符,会弹窗警告"请检查标定板类型"弹窗,如下图所示,标定板类型为A3会弹窗警告

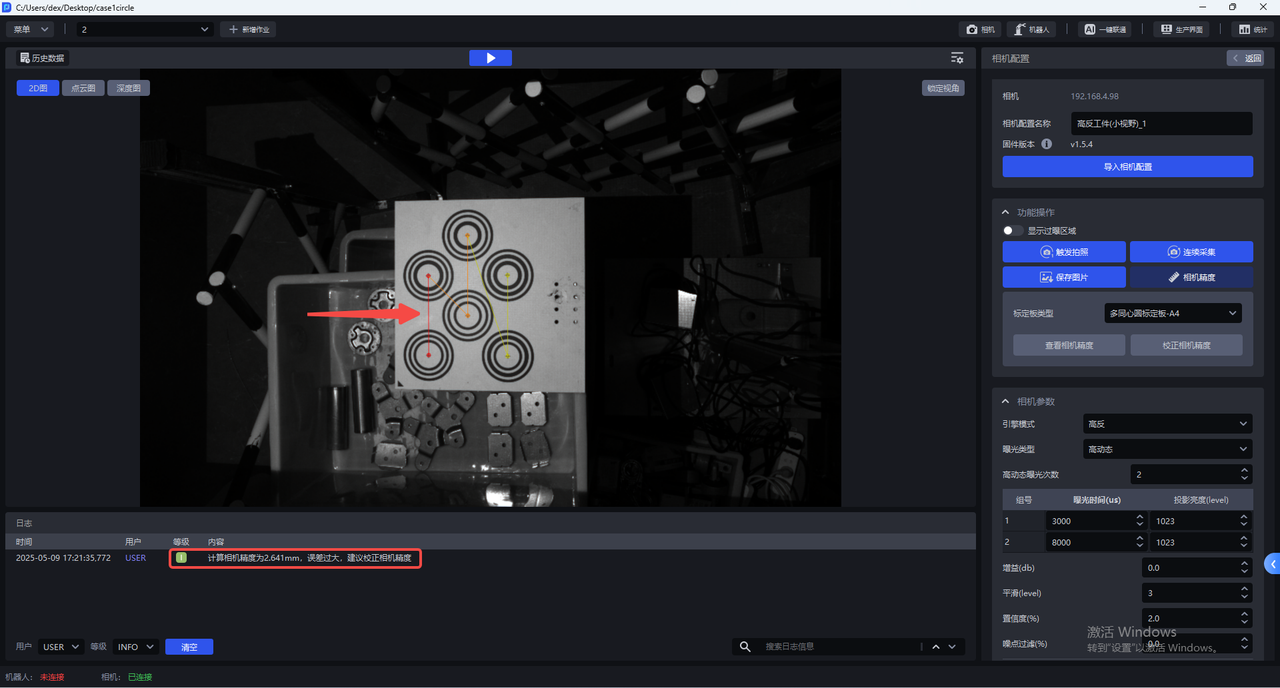
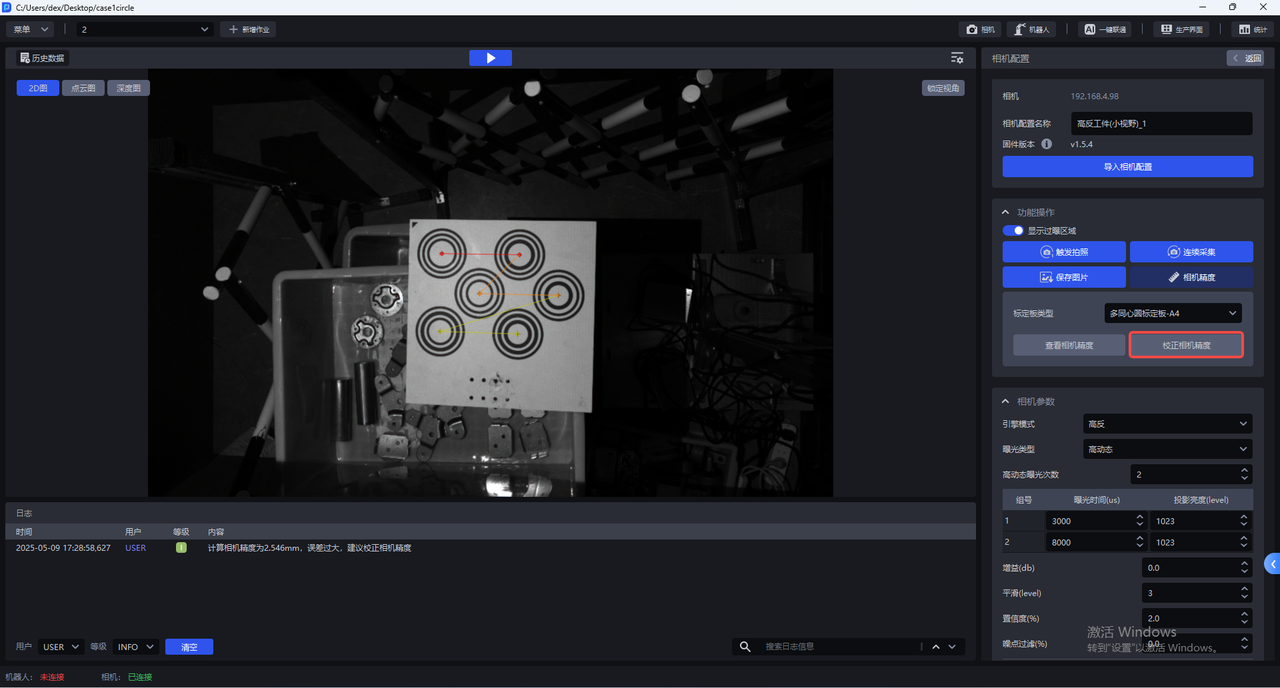
- 选择正确的标定板类型后,点击
查看相机精度,PickWiz会自动计算当前相机的相机精度,若相机精度符合要求,则直接调整相机成像参数;若相机精度过大,会弹窗提示框"误差过大,建议校正相机精度"。
各系列相机的相机精度<Xmm说明精度满足要求
XEMA-D:0.2mm
XEMA-S:0.2mm
XEMA-L:0.5mm
5.3.2 校正相机精度
在实际相机使用过程中,以及外参校正后,需要验证当下相机的精度是否达到要求。
查看相机精度,若相机精度误差异常,应当校正相机精度;
当前相机拍照得到的点云起伏波动较大,应当校正相机精度
在校正相机精度前,应开启
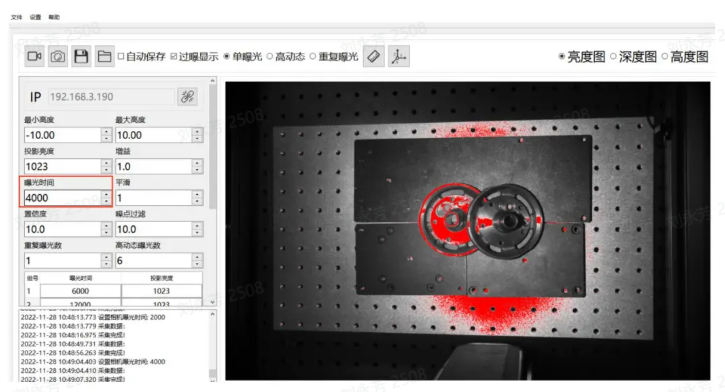
显示过曝区域查看相机成像的曝光程度,如有过曝区域应调整单曝光的曝光时间,确保相机成像曝光正常。校正完成后,应当将相机成像参数切换回原本的配置
- 在相机配置界面点击
相机精度
- 选择对应的标定板,若选择的标定板与实际不符,会弹窗警告"请检查标定板类型"弹窗,如下图所示,标定板类型为A3会弹窗警告
- 选择正确的标定板类型后,点击
校正相机精度
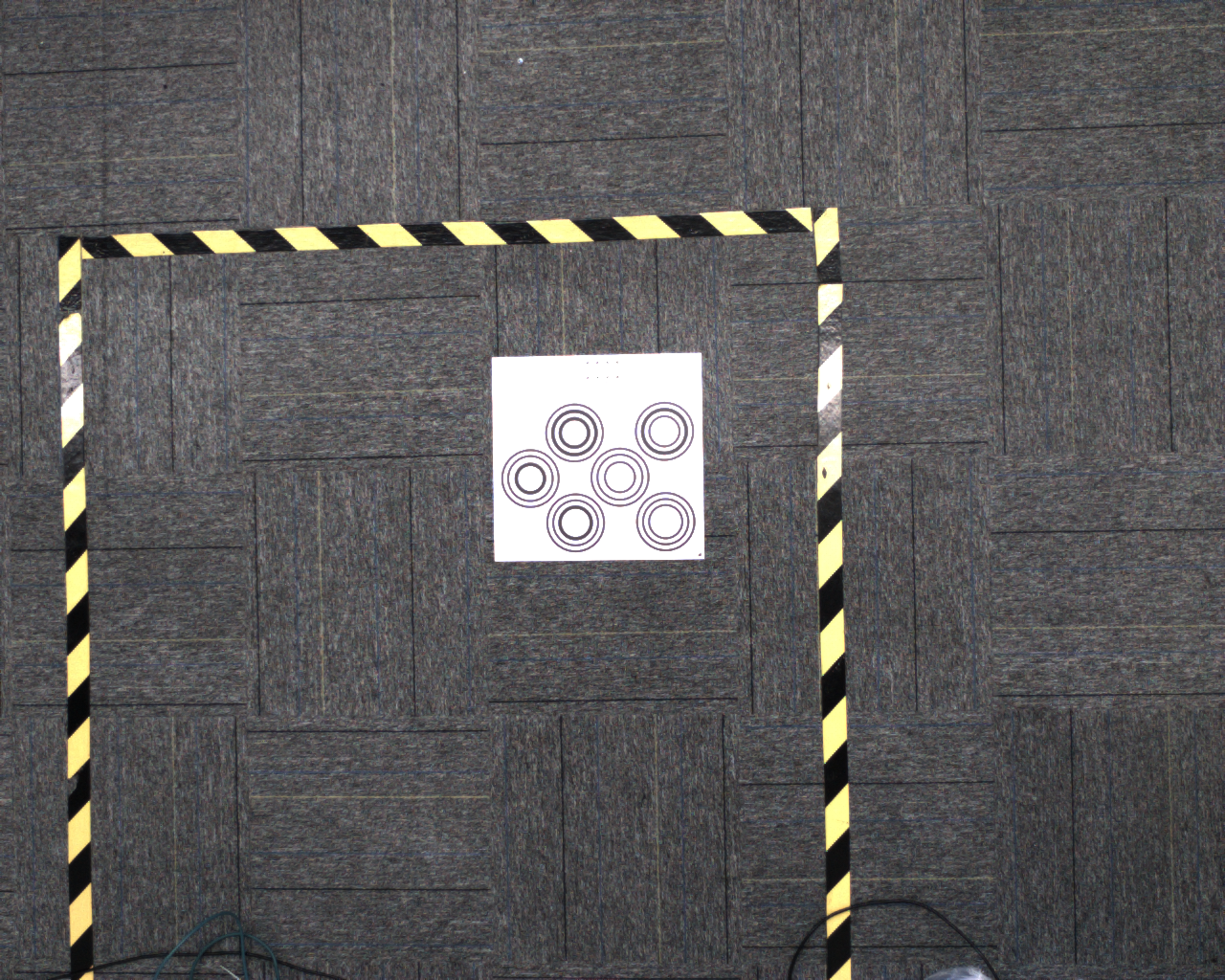
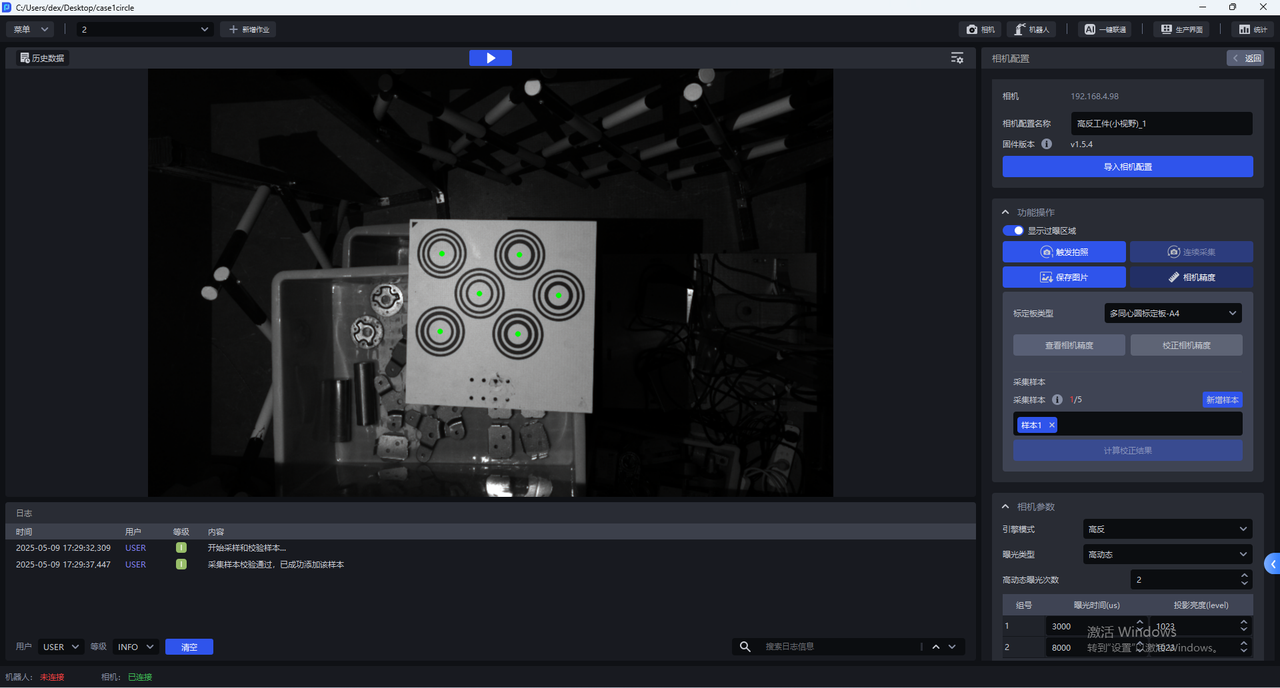
- 将标定板水平放置在相机视野范围的中央,点击
新增样本,相机开始采样和校验样本,若采集的样本校验通过,会添加到采集样本下方,如下图所示
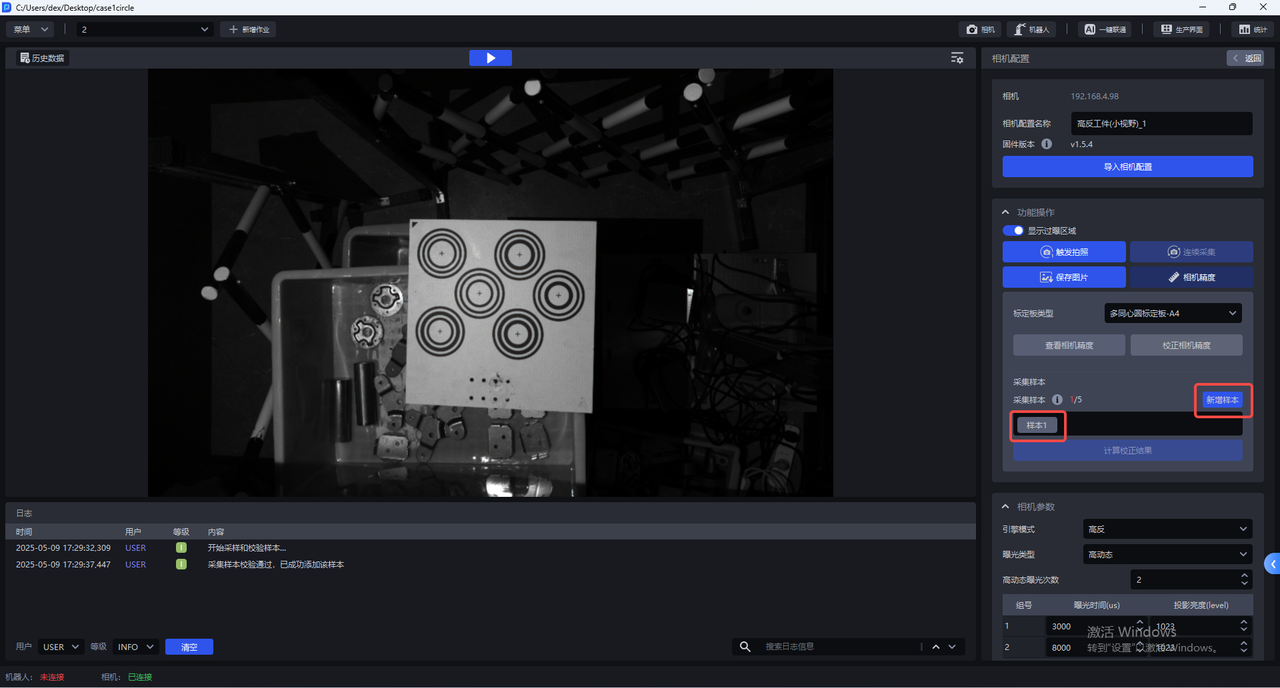
点击样本x,可查看采集的样本,校验通过的样本的标定板上所有同心圆的圆心变成绿色
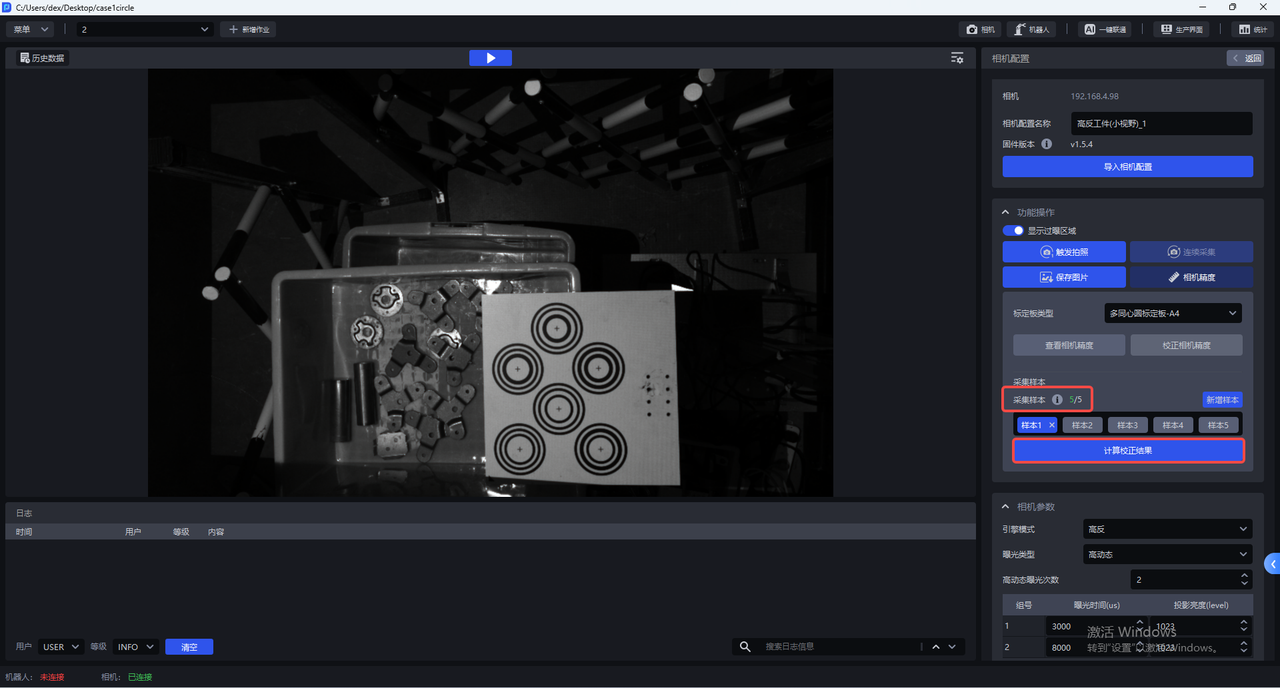
- 移动标定板到相机视野范围内的4个角落新增样本




在每个角落将标定板垫起角度,标定板摆放角度在15-30°,倾斜角度不可过大过小
- 新增5个样本后,点击
计算校正结果
- 校正完成后,会弹出提示框"相机精度校正完成,校正精度为x,误差正常,是否覆盖当前的相机参数配置"
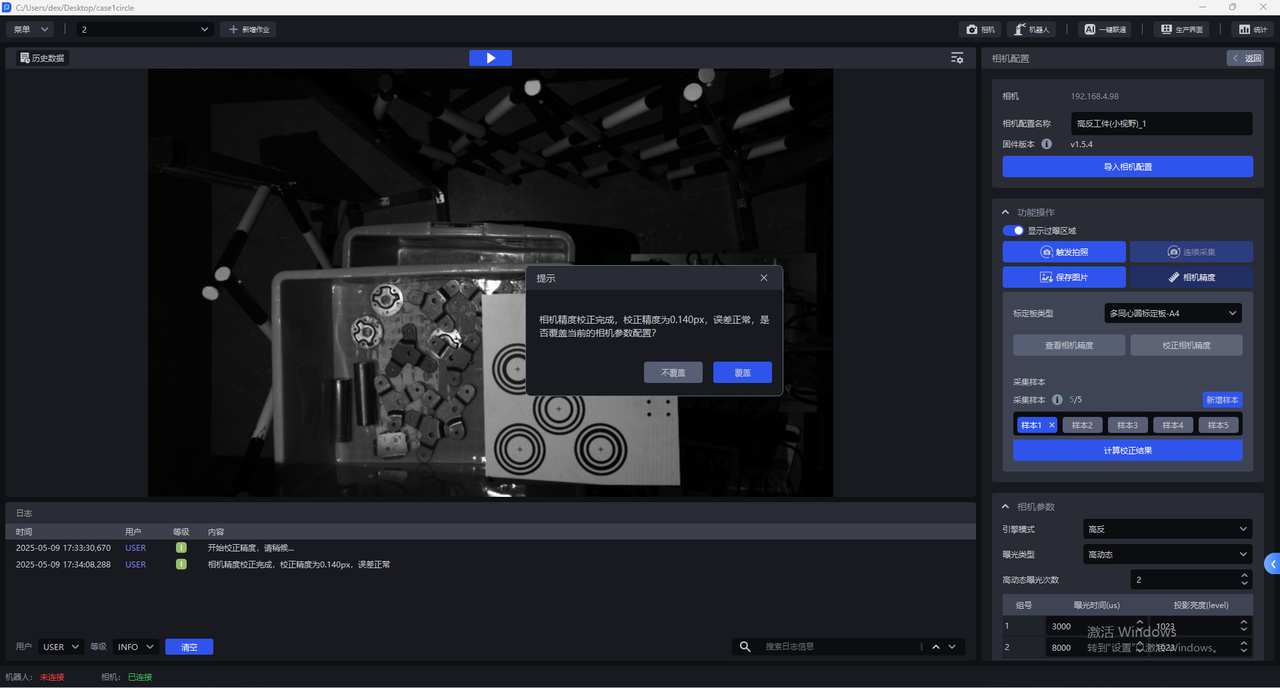
如选择覆盖当前的相机参数配置,会将相机精度校正结果更新到相机,需重启相机才能生效

6. 相机调参
双目相机由两个2D相机组成,深度学习模型分割识别以左目图像为准,左目图像经过预处理后输入到深度学习模型中
6.1 必选参数
6.1.1 引擎模式
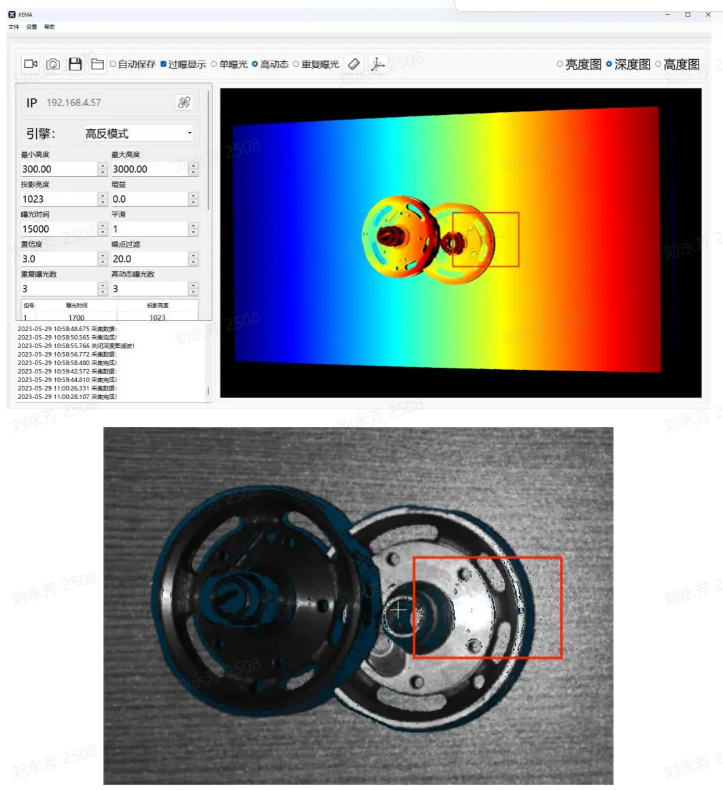
引擎模式包括常规、高反、黑色模式,其中高反模式对高反件效果极佳,黑色模式对黑色工件效果极佳、常规模式可应对普通工件。
| 引擎模式 | 说明 |
|---|---|
| 常规 | 适用于一般工件 |
| 高反 | 适用于高反光工件 |
| 黑色 | 适用于黑色工件 |
6.1.2 曝光类型
(1)单曝光
对于普通纹理工件可使用单曝光
(2)高动态:
对于高反工件可使用HDR功能进行点云融合
曝光类型的高动态应当与引擎模式的高动态配合使用
高动态范围成像(High Dynamic Range Imaging,简称 HDRI 或 HDR),用来实现比普通数位图像技术更大曝光动态范围(即更大的明暗差别)的一组技术。
高动态使图像层次更分明,明暗差别明显(特别是面对反光工件)。
调参建议:
- 使用高动态时,可根据具体的场景和工件,选择高动态曝光次数,取值范围 2~6,默认2。若3D点云质量和2D图像质量不佳,应当增加组数对物体进行多次曝光,以达到最佳的成像质量。
建议在满足点云质量的情况下使用更少的高动态曝光次数。
(3)重复曝光:相机要重复拍摄的次数,作用是提高信噪比(信号与噪声的比例),信噪比越高越好,这样随机噪声将会被抑制,增加了有效信息,取值范围为0~10。
对于黑色物体可使用重复曝光,通过多次曝光优化点云
6.1.3 曝光时间
相机曝光时间:曝光时间是景物的反射光线通过镜头到达成像感光材料上,快门所要打开的时间。曝光时间越长,进入的光线越多。曝光时间过长则会出现过曝现象,从而影响点云,应结合实际调整大小
范围:1700-100000
曝光时间和投影亮度为一组,一次高动态曝光次数就是一组,为每一组设置合适的曝光时间和投影亮度值。
曝光时间:曝光时间是相机快门打开的时候光线进入相机的时间。曝光时间越长,进入的光线越多,图像越清晰。
曝光时间过长则会出现过曝的现象,可打开显示过曝区域,显示红色的部分为过曝区域。
6.1.4 投影亮度
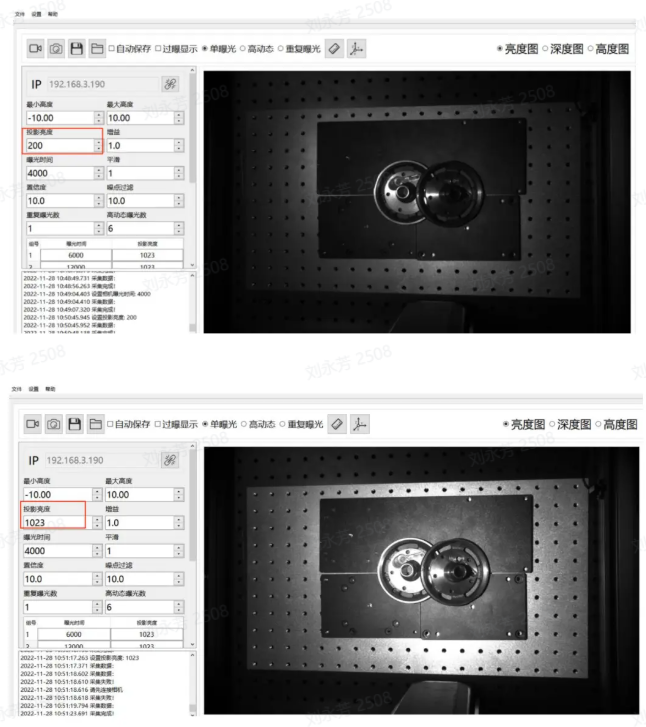
投影亮度是指投影光线的强度,光线强度越大,图像就越明亮、越清晰,在一定范围内,人眼会因为亮度大而觉得画面更清晰,如果超过这个限度,过强的亮度则会导致无法看清图像。
范围:0-1023
该值越大,投影的亮度越大,可有效提高信噪比。建议使用最大值,若曝光时间调至最小仍过曝再考虑缩小此值
注意:建议亮度调整为 1023
6.1.5 增益
调节画面的亮暗。
范围:0-24
可调节2D相机的增益值,应适当增加,增益增大,噪声会随之增大
6.1.6 平滑
范围:0-5
对点云进行平滑操作
6.1.7 置信度
置信度表明可信程度,会在最初对点云进行一次筛选,一般2-5即可,客户可根据现场调整
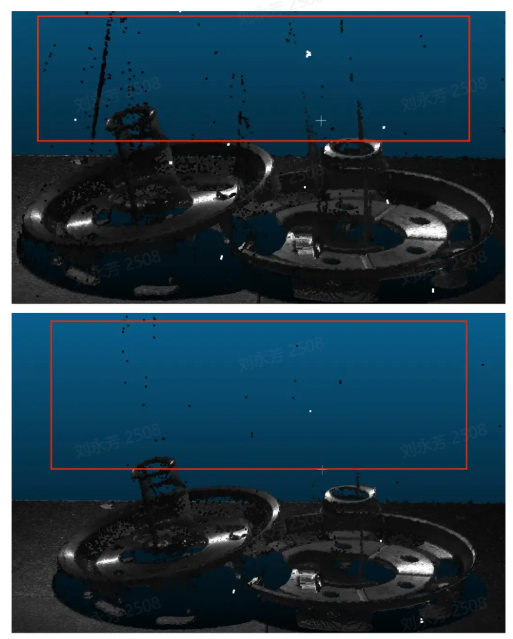
调低置信度,深度图中的黑色部分被保留更多;相反,调高置信度之后深度图中的黑色噪声会被去除。
范围:0-100
6.1.8 噪点过滤
在机器视觉应用场景中,如检测金属、铝箔表面、反光膜片、光滑表面的物品时,镜面反射会造成局部反射光过强,从而失去物体原有信息,干扰机器视觉检测。噪点过滤可将产生的噪声部分消除,保存物体原有信息。
范围0-100
在识别金属、铝箔表面、反光膜片、光滑表面的物品时,镜面反射会造成局部反射光过强,从而失去物体原有信息,干扰 Pickwiz 识别和检测图像。调大噪点过滤值可将产生的噪声部分消除,保存物体原有信息。
6.2 可选参数
6.2.1 半径滤波
对于点云中的每一个点,确定一个半径为r的球体,选取有效点数,若内部点数小于有效点时,则认为是噪声点进行剔除,半径越小、有效点数越大,滤波效果越明显
半径范围:0-99
有效点范围:0-99
6.2.2 深度滤波
对于Z轴方向的悬空噪点进行过滤,阀值越大,滤波效果越明显。基于深度图的滤波方法,在 1000mm 的距离下建议阈值为 33。
范围:0-100
6.2.3 反射滤波
对于金属互反射造成的立面噪声进行过滤,阀值越大,滤波效果越明显
范围:0-100
6.2.4 相位校正
相位校正即点云灰度补偿,是一种在三维点云数据中对灰度信息进行校正的方法。 点云灰度补偿的目的是消除这些灰度值差异,并将点云中的灰度信息转化为与实际物体表面反射率相对应的数值,阀值越大,校正越明显
范围:0-100
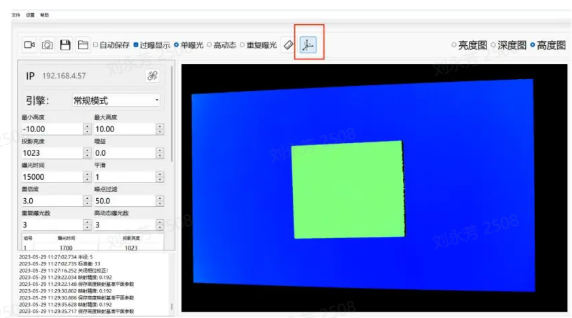
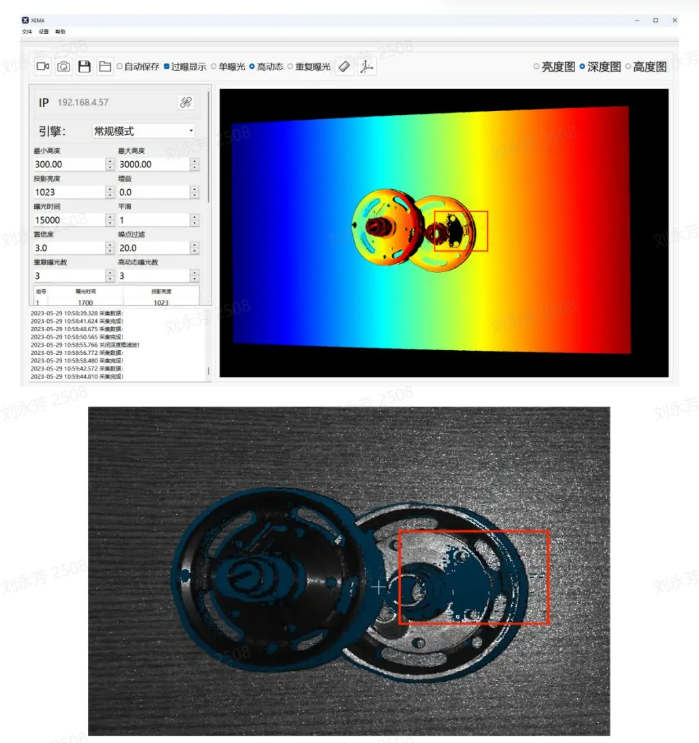
使用方法:首先放置标定板,以标定板的平面为基准平面。如上图所示。
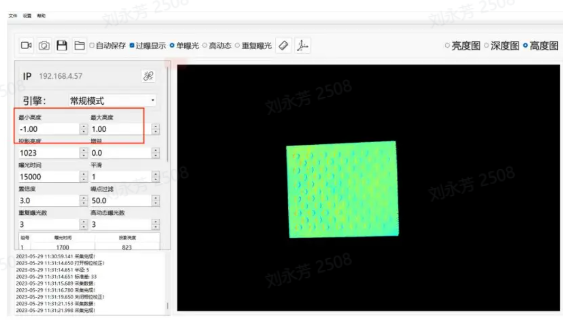
如最大高度最小高度章节介绍,将最大高度调为 1,最小高度调为-1,只显示标定板部分,如上图所示。
在不打开相位校正时,标定板如上图所示,在实际的标定板中整个是平面,圆和非圆部分不存在上下起伏,但实际拍出的效果则是圆有起伏。
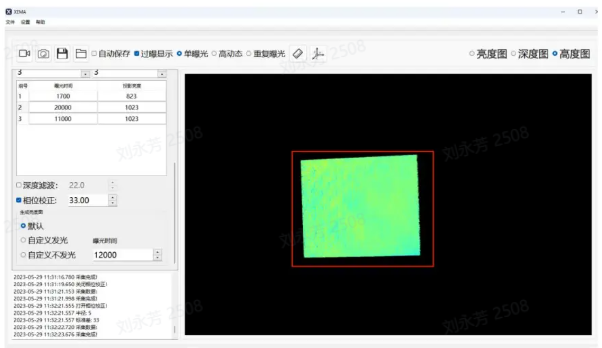
在打开相位校正后,发现标定板基本不存在颜色差异或差异不明显,说明校正成功。
6.2.5 2D图叠加曝光
该功能可在得到点云后,对最初2D图进行单独的覆盖;有时会遇到点云良好,但2D图却过暗过爆,不满足要求,此时便可打开2D叠加曝光,对最初的2D图进行覆盖。
选择发光则可以自行设置曝光时间、增益,拍摄方式(单曝光或高动态)。
选择不发光则是环境中的光线亮度,也可自行设置曝光时间、增益,拍摄方式(单曝光或高动态)。
叠加增益
在使用2D叠加曝光功能时,可调节此增益使画面更亮
叠加曝光时间
在使用2D叠加曝光功能时,可调节此曝光时间使画面更亮
7. 典型案例
相机调参原则:保持工件表面曝光统一,纹理清晰可见。调参案例以1024*1280分辨率为例
案例1:上海工博会-户外阳光拆垛
场景特点:环境光突变,由室内LED变化为阳光直射(下图为未经调整到调整后变化效果)

调参思路:保持环境光突变后,成像稳定且节拍不改变,使用自动曝光模式2(海康SDK自带AOI自动曝光),修改AOI参数。
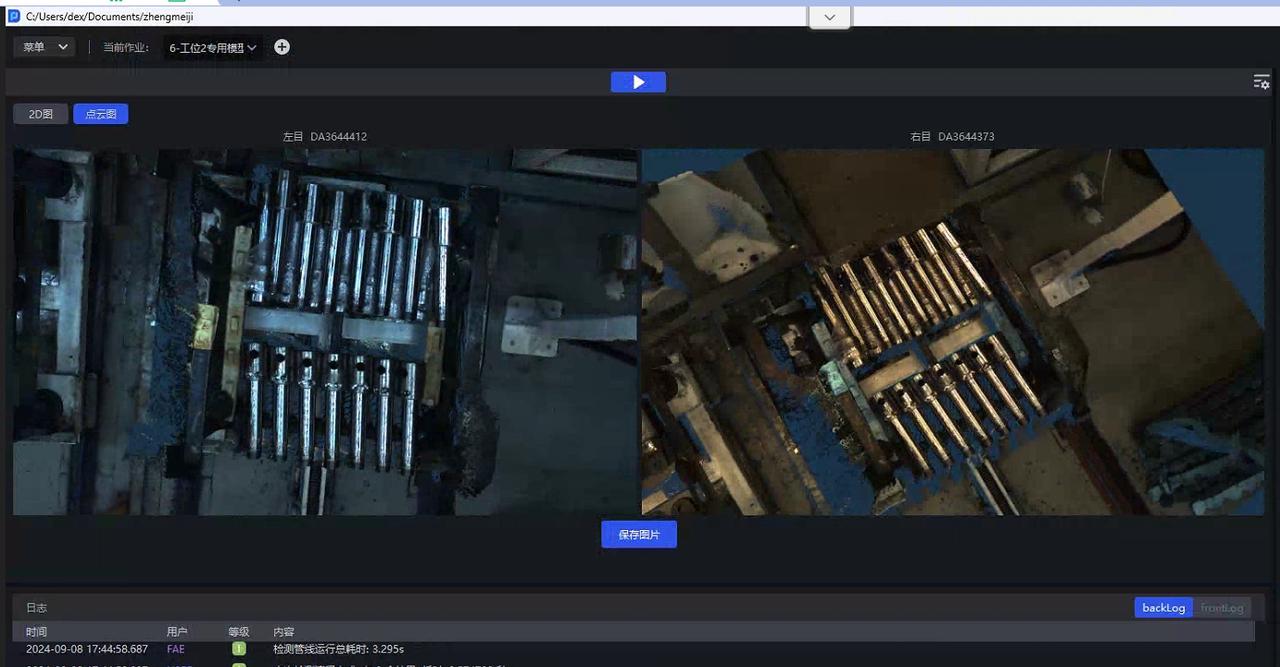
案例2:上海工博会-室内灯光高反棒料
场景特点:聚光灯光颜色变化,但亮度几乎一致
调参思路:固定曝光降低曝光值即可
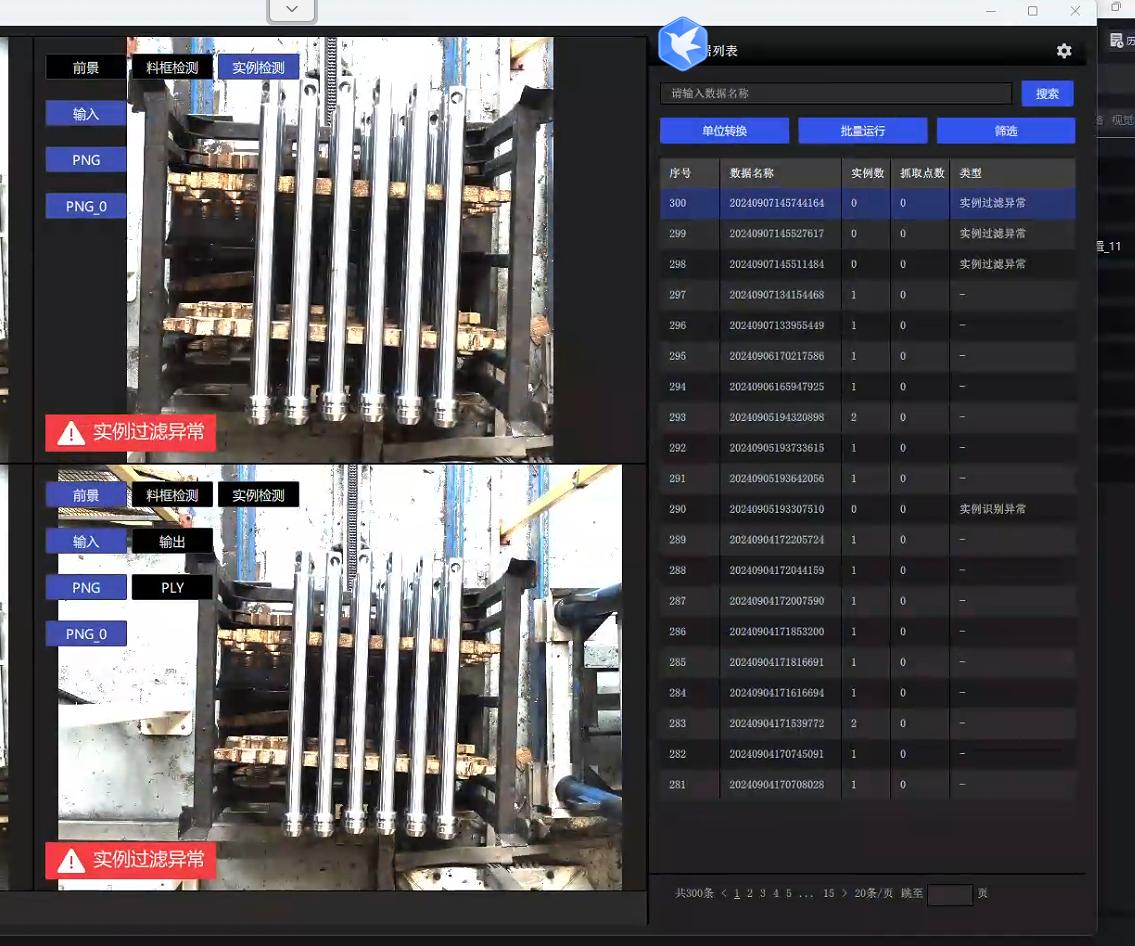
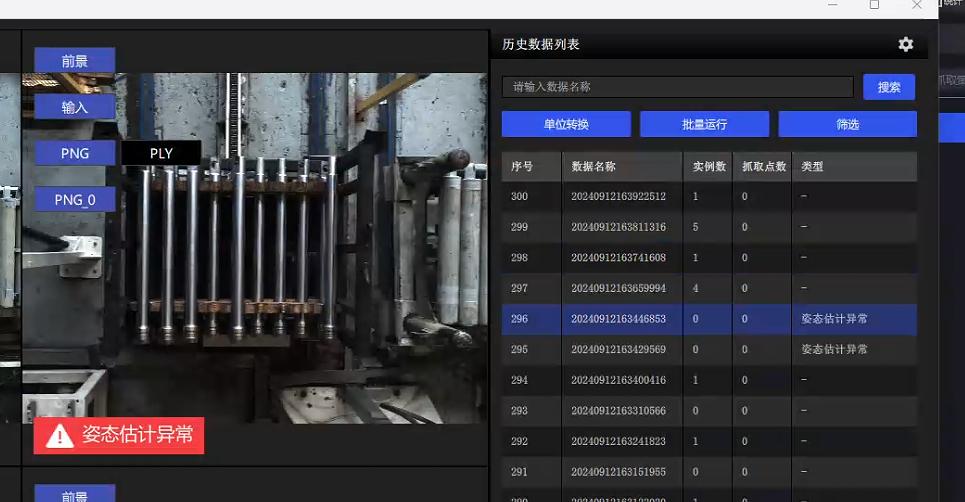
案例3:陆源油缸-半户外阳光高反工件
场景特点:头顶有天窗,受天气影响,白天光照强度各不相同,夜晚需补光(下图为调整后效果)

调参思路:无需考虑节拍,使用PID自动曝光,调节至需要的亮度即可
案例4:山东德州-腾阳拆垛
场景特点:下午三四点有阳光直射,造成垛面局部过曝(下图为HDR结果)
调参思路:面对环境亮度变化较大的场景,并且麻袋为白色,若框选海康AOI自动曝光易受底部露出影响,故选择pid自动曝光,ExposureAuto填3;局部阳光直射强烈过曝,需使用HDR高动态合成,故开启HDR, "HDREnable": 1,基于PID曝光倍率。具体看参数里黄色标注部分。"HDR": "AutoExposureTimeRates",0.1是因为太阳光十分强烈,需要降低亮处的曝光;1是正常调整的合适曝光值,;1.5是为了拉高暗处的画面亮度。
认识双目相机
结构
双目相机由两个2D相机组成,内外参标定文件用来说明这两个相机的相对关系。
深度学习模型分割识别以左目图像为准。
调参本质
硬件上属于2D,所以调参调的其实是2D相机的曝光、白平衡之类的参数,只有曝光调好了,后续的成像质量和精度才能得到保障。
相关概念介绍
基线长度:两个相机的距离(通俗说法)
双目点云数量:多少像素就有多少点,也就是说分辨率3036*4024,会有千万级别的点云数量
rectify:基线矫正,将两张2D RGB图对齐的过程,可视化为红线图,可以看到红圈内红线在两张图上穿过了同一个点

视差:两个相机拍摄得到的2D图上,实际场景的一个点在左右目经过rectify后的2D图的水平方向上距离多少个像素
计算公式:disp = 基线长度 * 相机内参fx / 距物体的距离
scale缩放比:分辨率3036*4024乘上缩放比0.34,得到就是接近于1024*1280分辨率的图片,推理时内参也随之改变