
外观
相机问题收集及解决方法
一、相机调参问题
1、XEMA-LC,高反工件,现场点云缺失
解决方法:对于高反工件要使用HDR模式,且采用大/小曝光兼顾过曝过暗位置,对于噪声应使用半径滤波,深度滤波进行过滤。
2、XEMA-S,金属圆环内有噪点,圆环边缘起伏波动大
解决方法:高反工件,使用高反模式下高动态,注意两组参数兼顾亮暗,对于参数对应的点云不要过曝,会影响点云,过滤记得开滤波,设置值太小,过滤不完全,要加大,平滑可也开,降低点云厚度
3、XEMA-L,黑色反光压缩机,点云不完整
解决方法:黑色高亮反光工件,使用高动态,且大曝光+增益(节省时间),过滤采用半径滤波与反射滤波进行过滤。

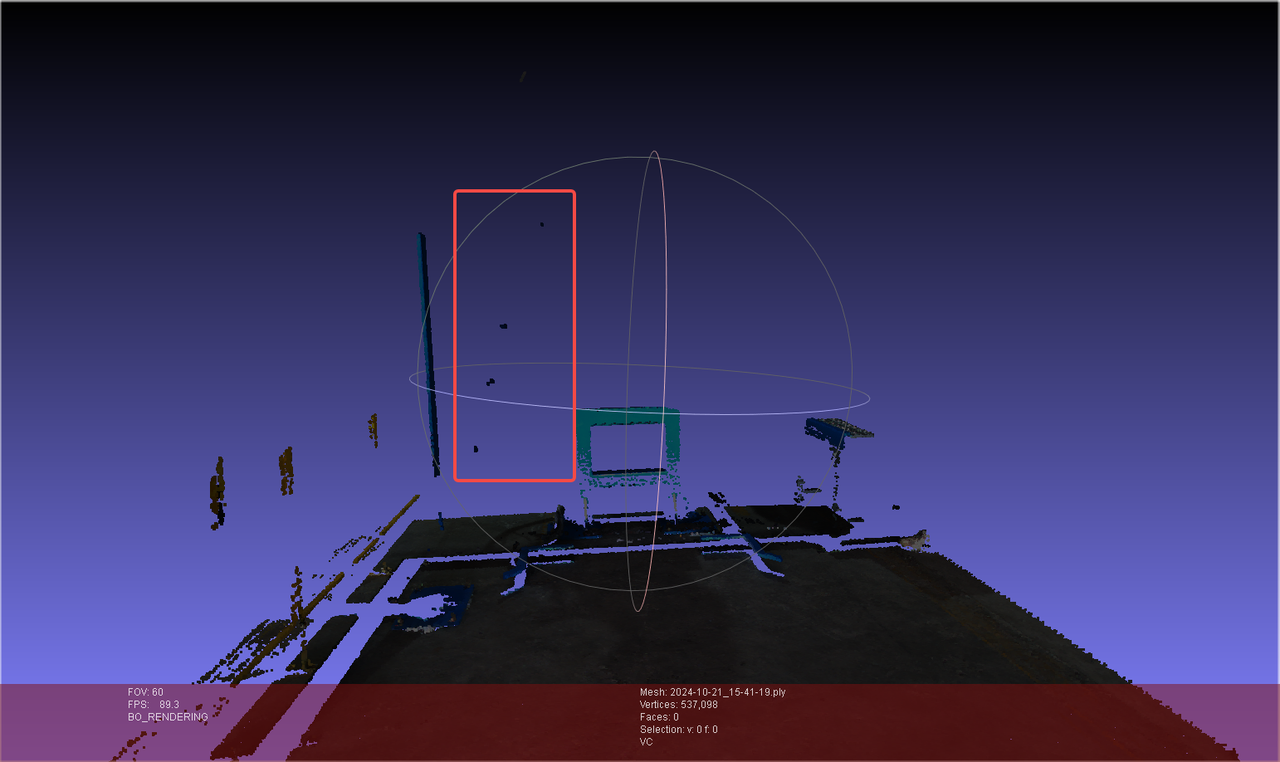
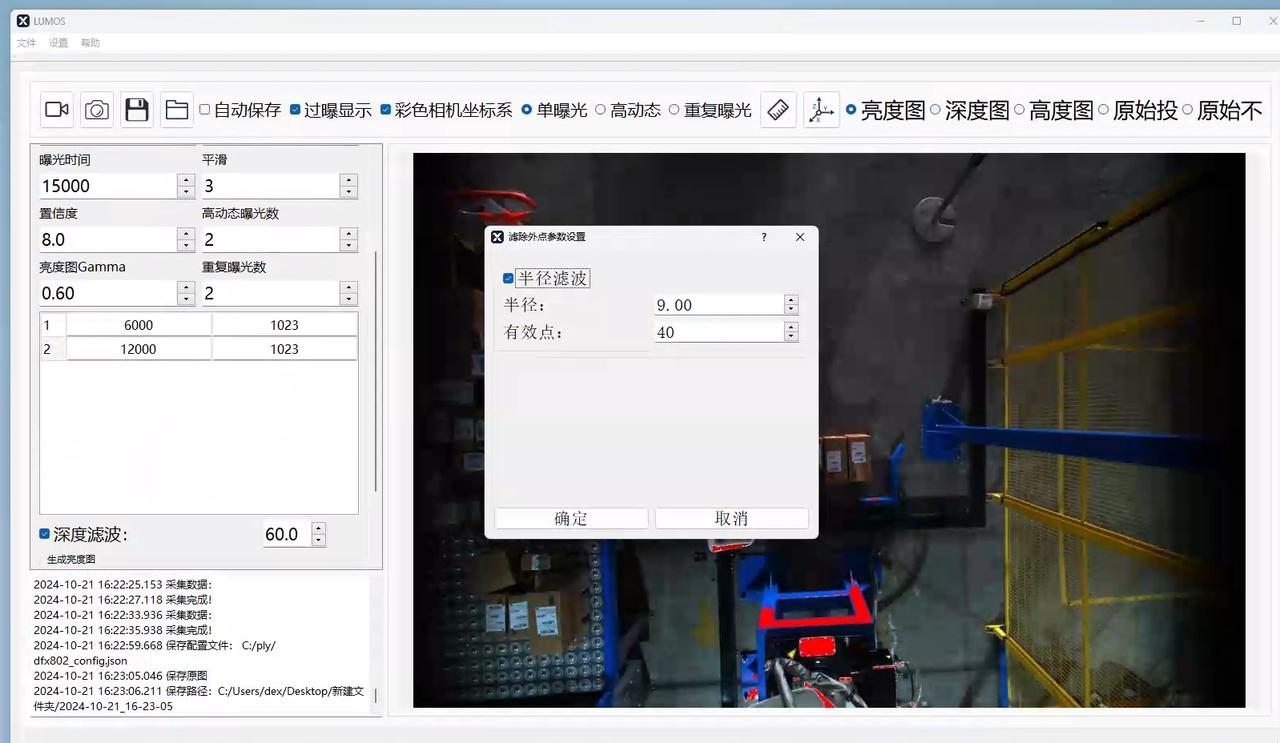
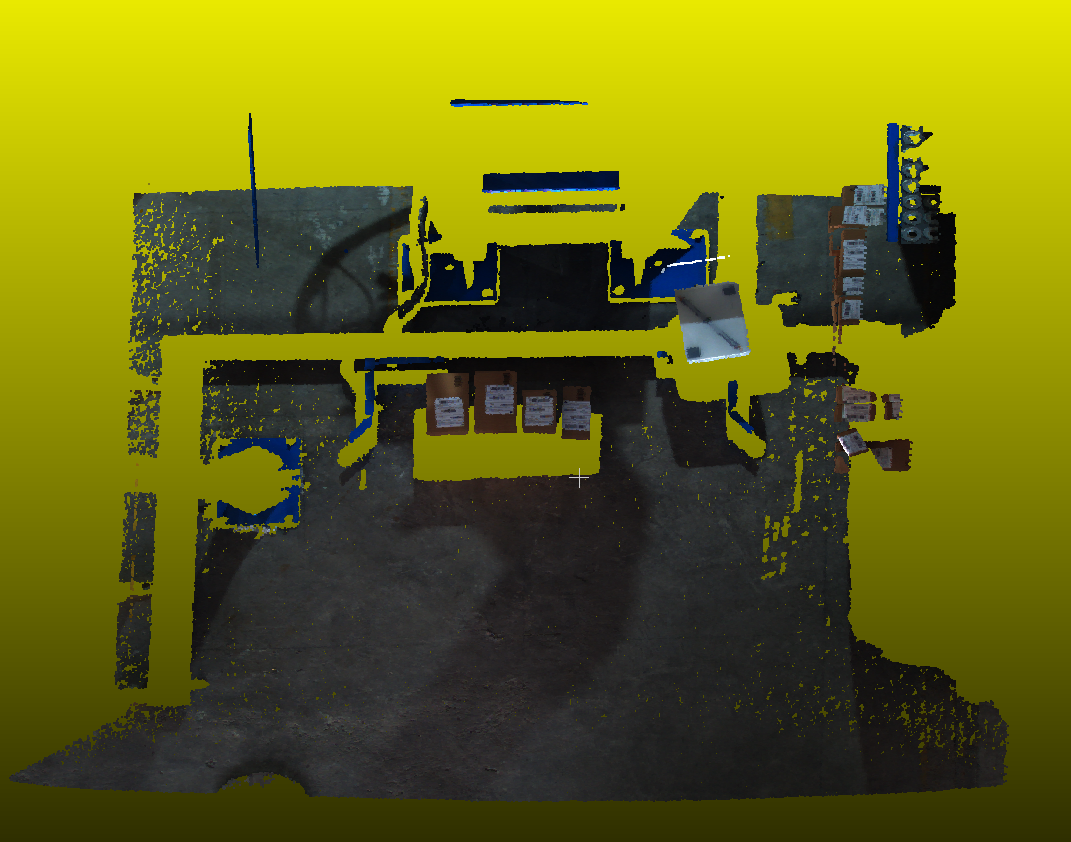
4、FINCH,纸箱噪点飞起
解决方法:开启深度滤波和半径滤波,深度滤波值越大,滤波能力越强,半径滤波例如固定半径,阀值点数越大,滤波能力越强。例如图中深度滤波60还是不够,再结合深度图保证有效信息的情况下,继续增大,同理,半径滤波的阀值点数继续加大。
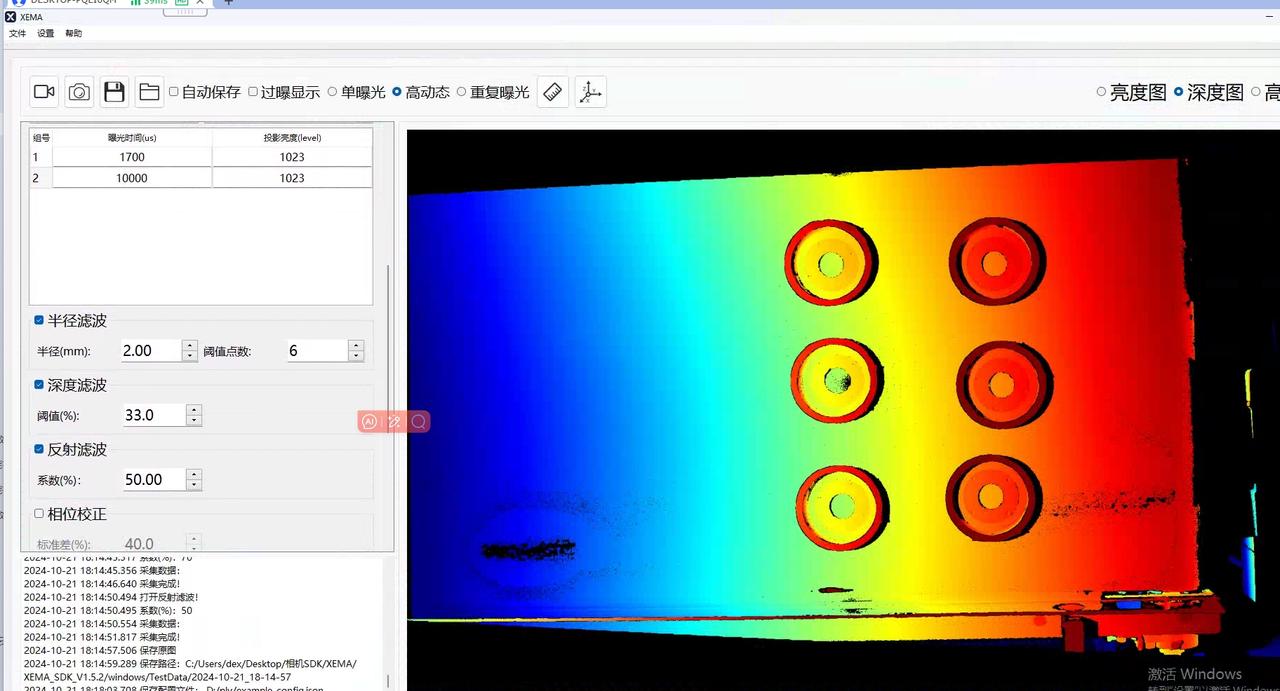
5、XEMA-L,铝制圆环、点云成像不佳
解决方法:采用高动态,一组小曝光1700/1023,使高亮地方不过爆,有深度信息,一组大曝光10000/1023,使得暗地方信息显现,有深度信息,过滤可选用半径滤波,深度滤波进行过滤,点击高动态效果/参数如下。
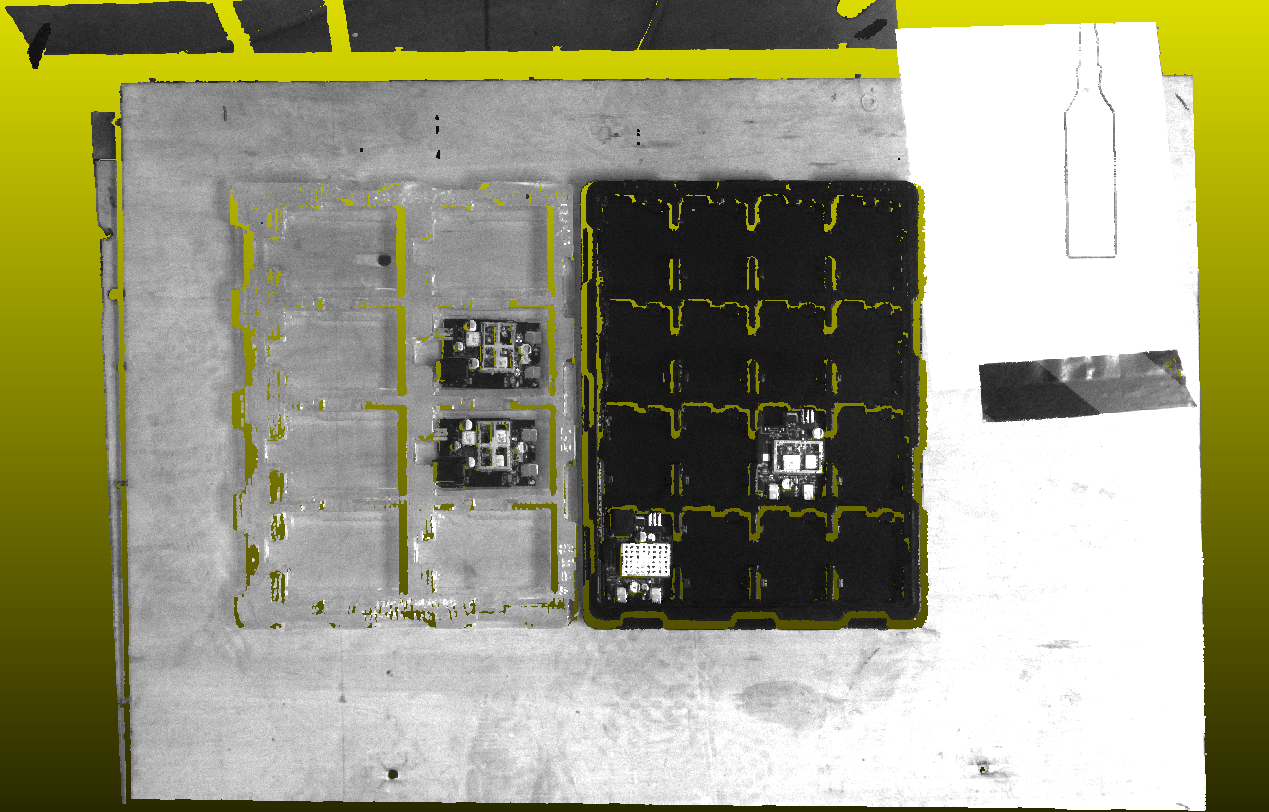
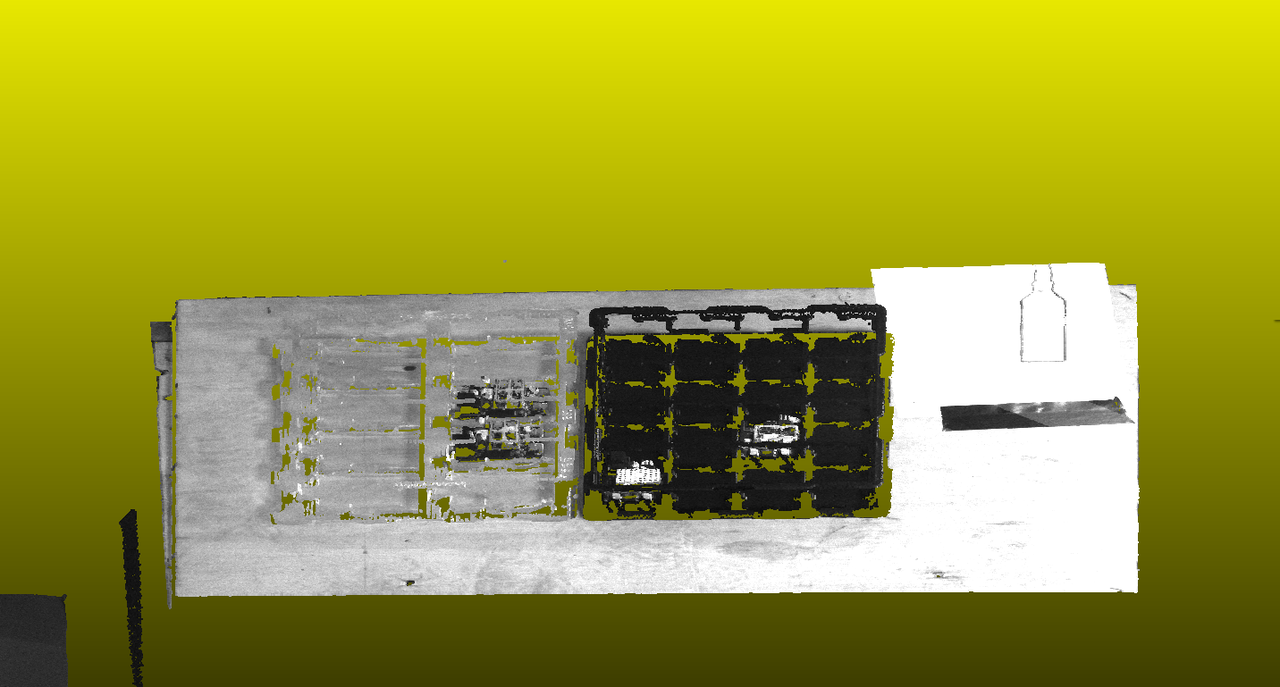
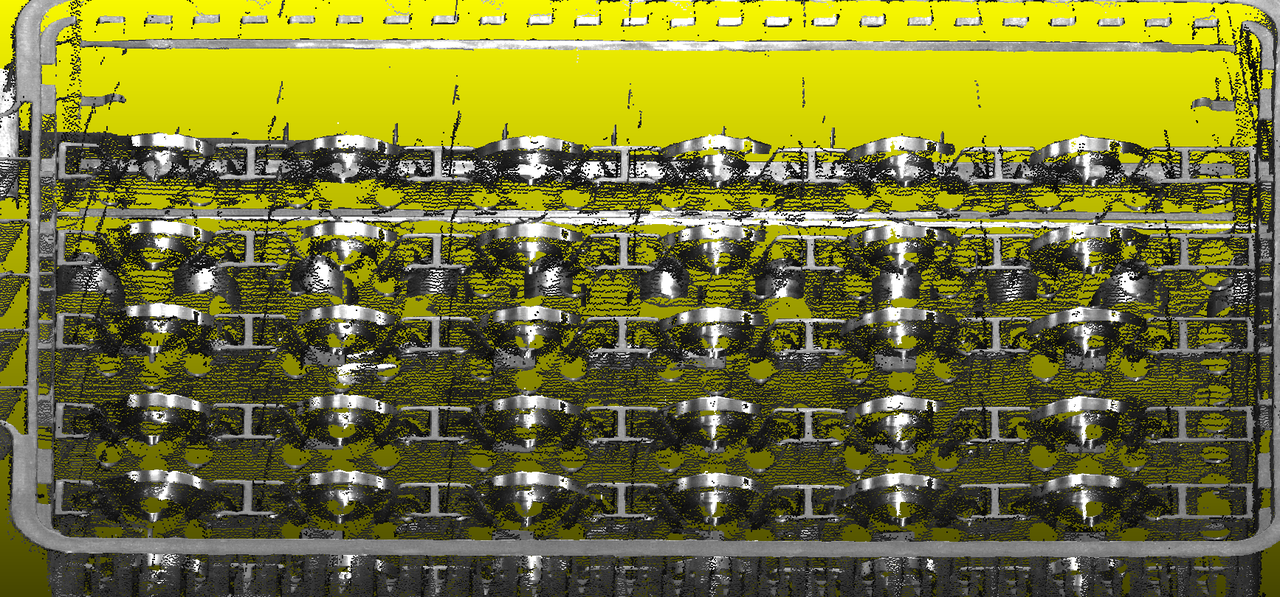
6、XEMA-L,盒装电路板噪点过多,且点云缺失
解决方法:对于成像效果还是小曝光兼顾高亮,怎么兼顾?别出现过曝就是兼顾,大曝光兼顾暗区域,对于噪点,使用深度滤波40,半径滤波2/10组合,往往一次难以最佳,看着深度图和点云一次次优化,例如深度滤波阀值小了就加嘛,别每次变动1的数值不舍得加,固定半径,加阀值,使劲儿加。就解决了

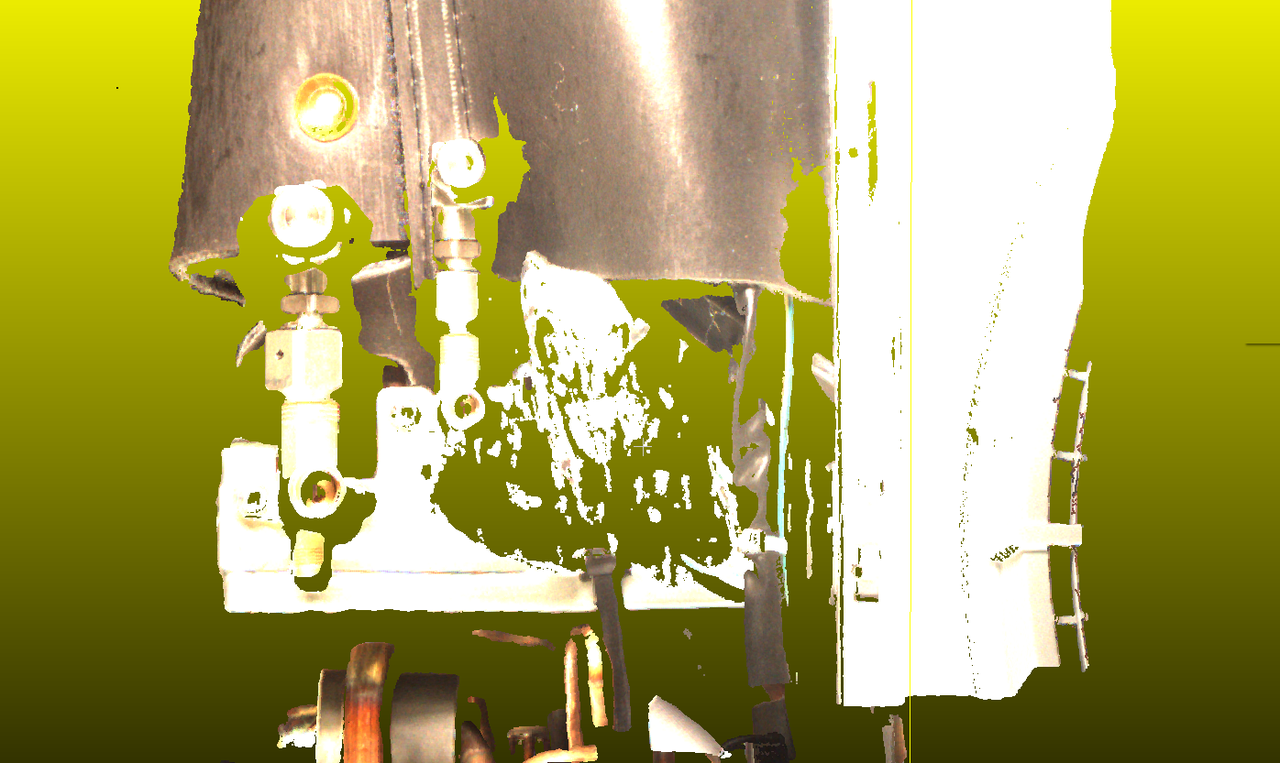
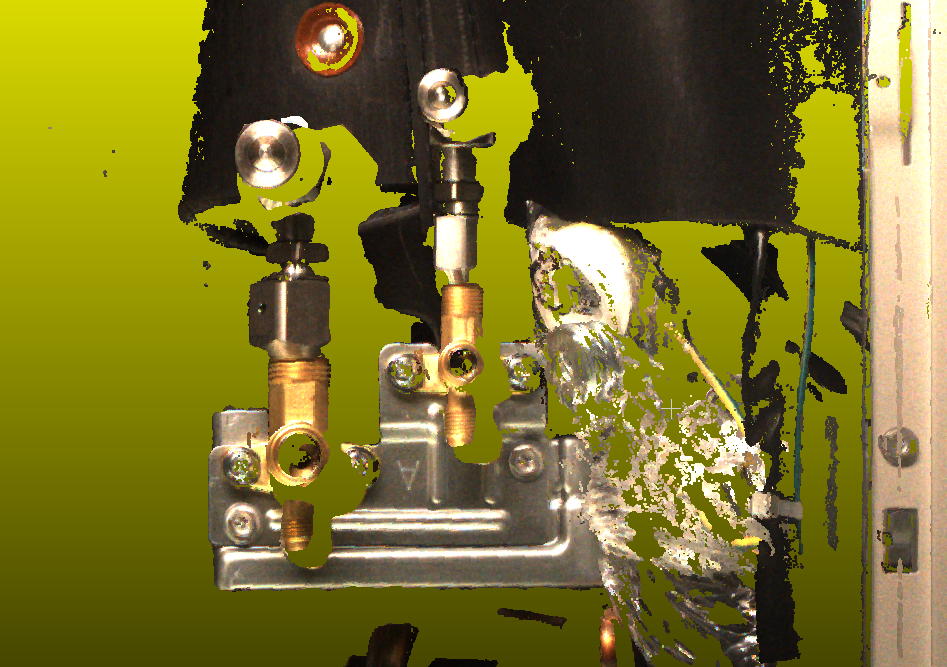
7、XEMA-SC,空调铜螺栓,效果不佳,噪点过多
解决方法:刚开始曝光太大了,这谁干的,差评,我采用200/1700,1023/5000两组曝光HDR模式,因为本身距离近,又是金属所以不用那么大曝光的,第二张图是我调的,五星上将麦克阿瑟见了都说好!
8、XEMA-L,金属轴,噪点过多
解决方法:标准的局部反光工件,不用看就用HDR模式,因为这是L,在1.2m,所以大曝光采用了1023/20000,小曝光1023/1700的HDR,这噪点比我头发都多,所以可用噪点过滤/深度滤波。半径滤波进行过滤,往往一次难以最佳,看着深度图和点云一次次优化,例如深度滤波阀值小了就加嘛,别每次变动1的数值不舍得加,固定半径,加阀值,使劲儿加。

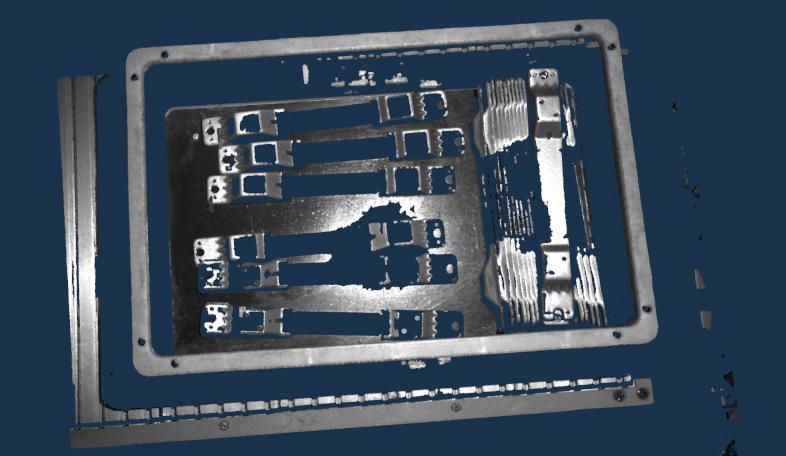
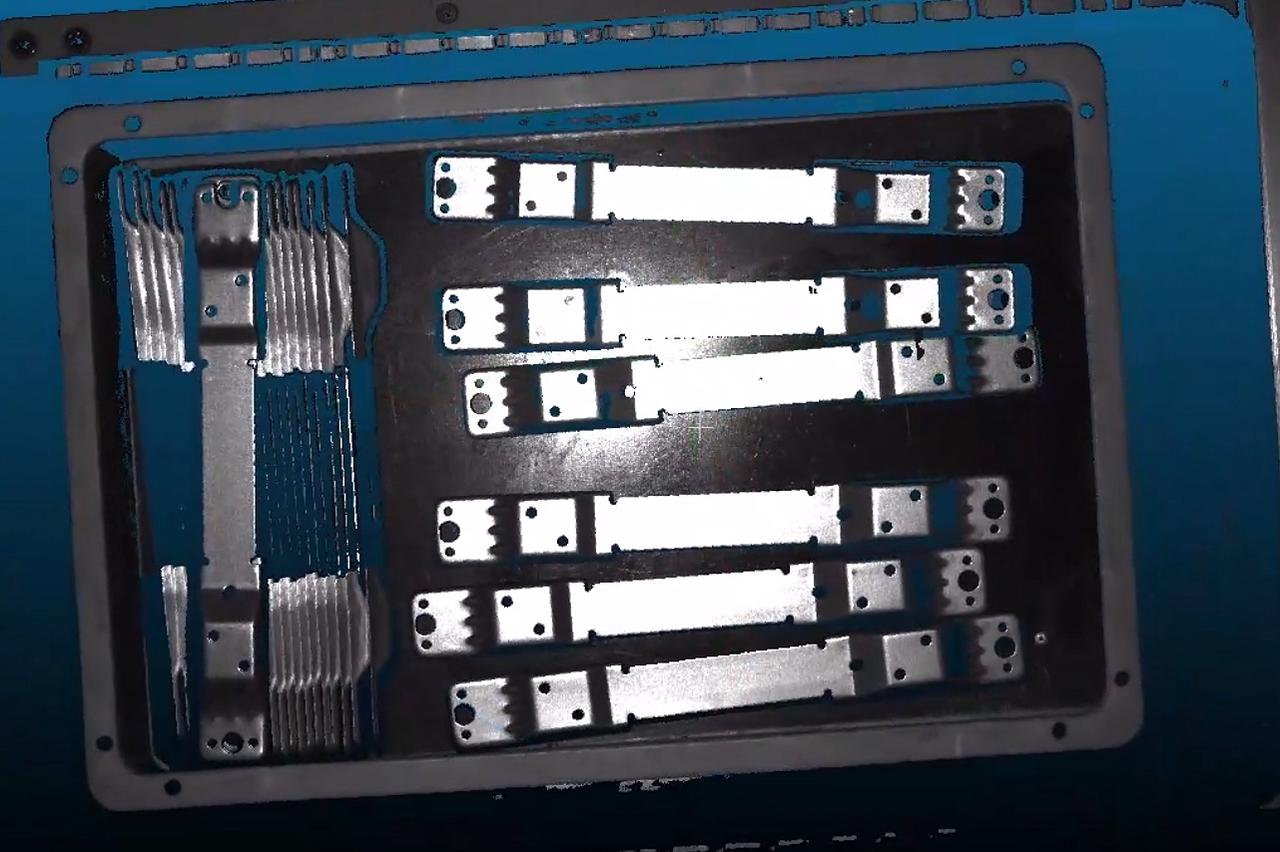
9、XEMA-S,金属铁片
解决方法:记住对于薄薄的贴片,肯定有个位置局部反光特别厉害,看下图你用单曝光,虽然边缘点云信息还可以,但是中间就过曝了,导致点云都没了,所以还得HDR啊,万能的融合啊,500/1700,1023/8000两组,为啥有一组投影亮度用了500,是因为即使曝光时间1700,也还是过曝啊,那我就不得不动我亲爱的投影亮度了,适当减小。
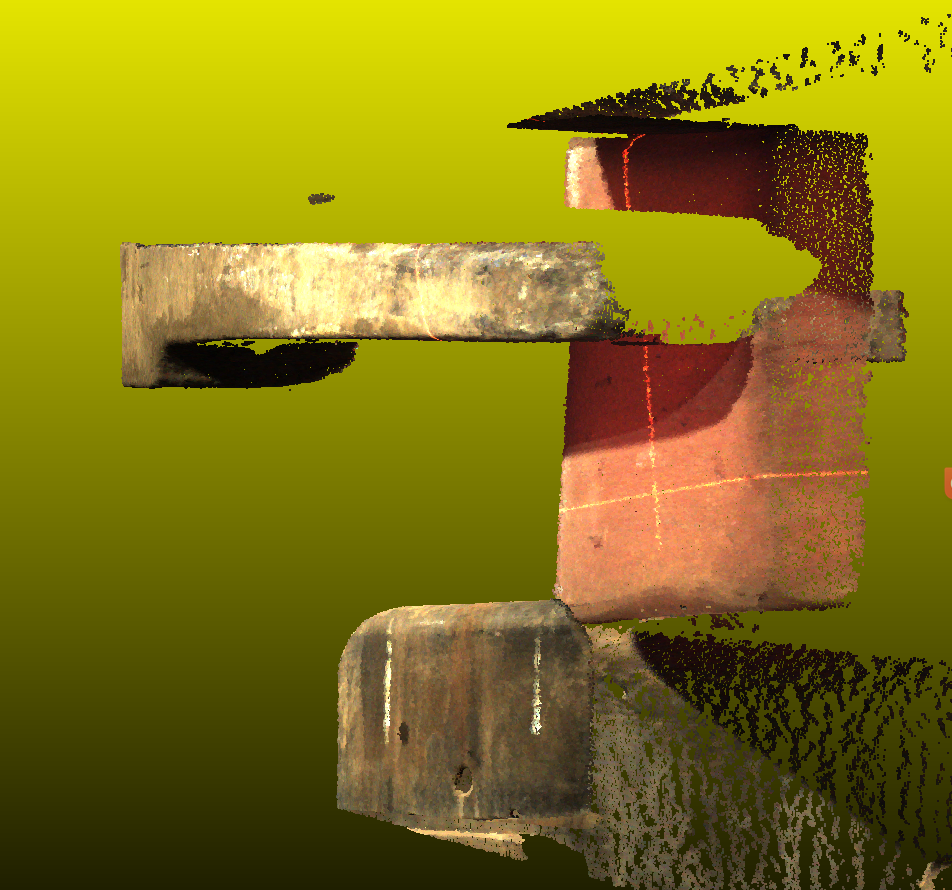
10、XEMA-L,金属铝锭,上方有漂浮噪点
解决方法:该噪点悬浮真实工件上方,实际成像错误,导致一部分点云漂浮在空中,在过滤的时候,要加大深度滤波的值,和半径滤波的过滤能力,深度滤波我这里直接选择70(100为顶),半径滤波一般是(2,10)就足以应对一般工件,这里我选择(2,18),总之要根据点云图,适当增大过滤的参数。
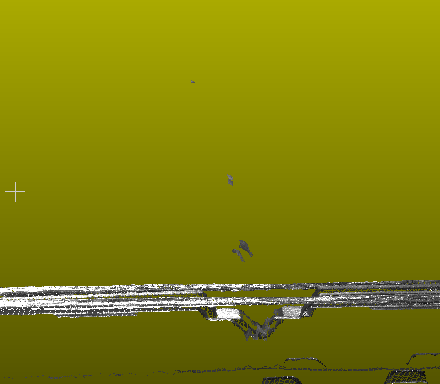
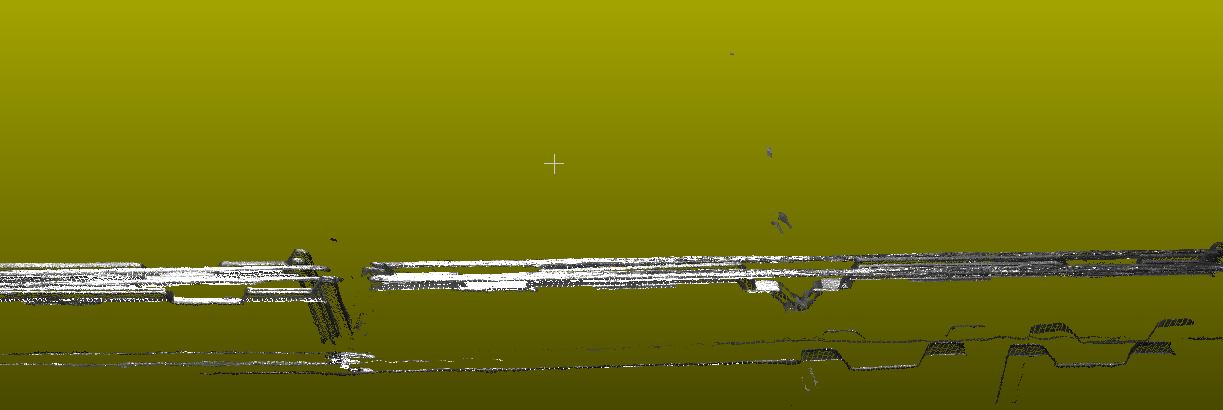
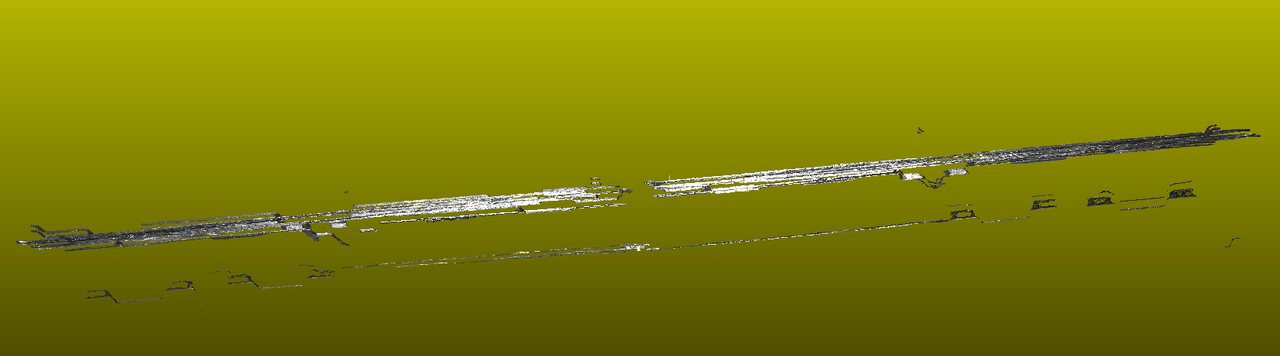
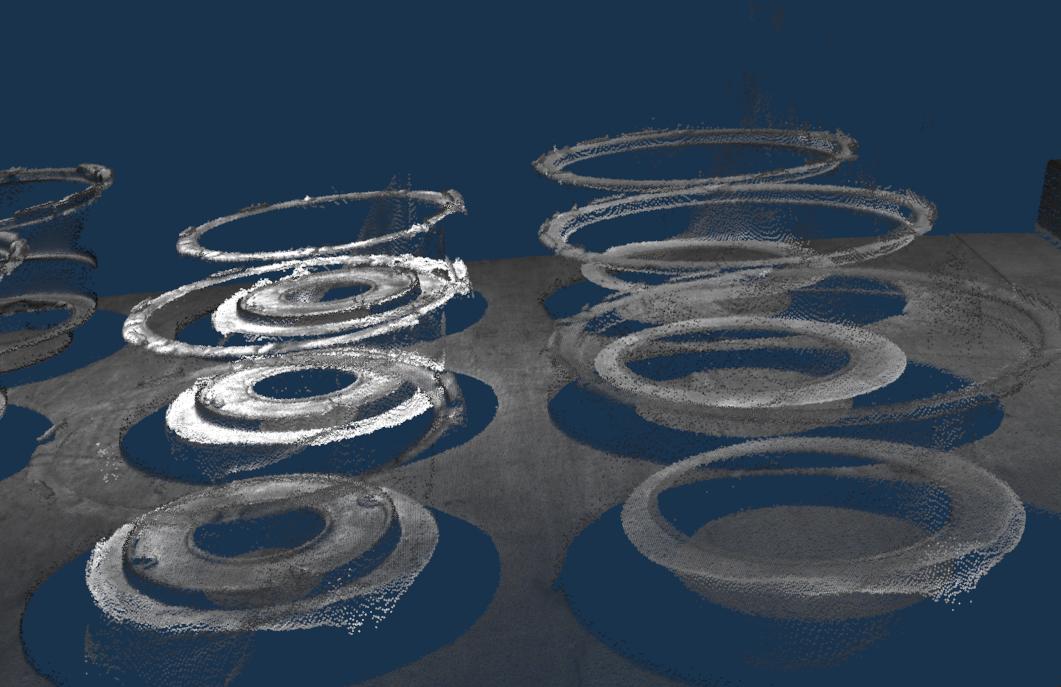
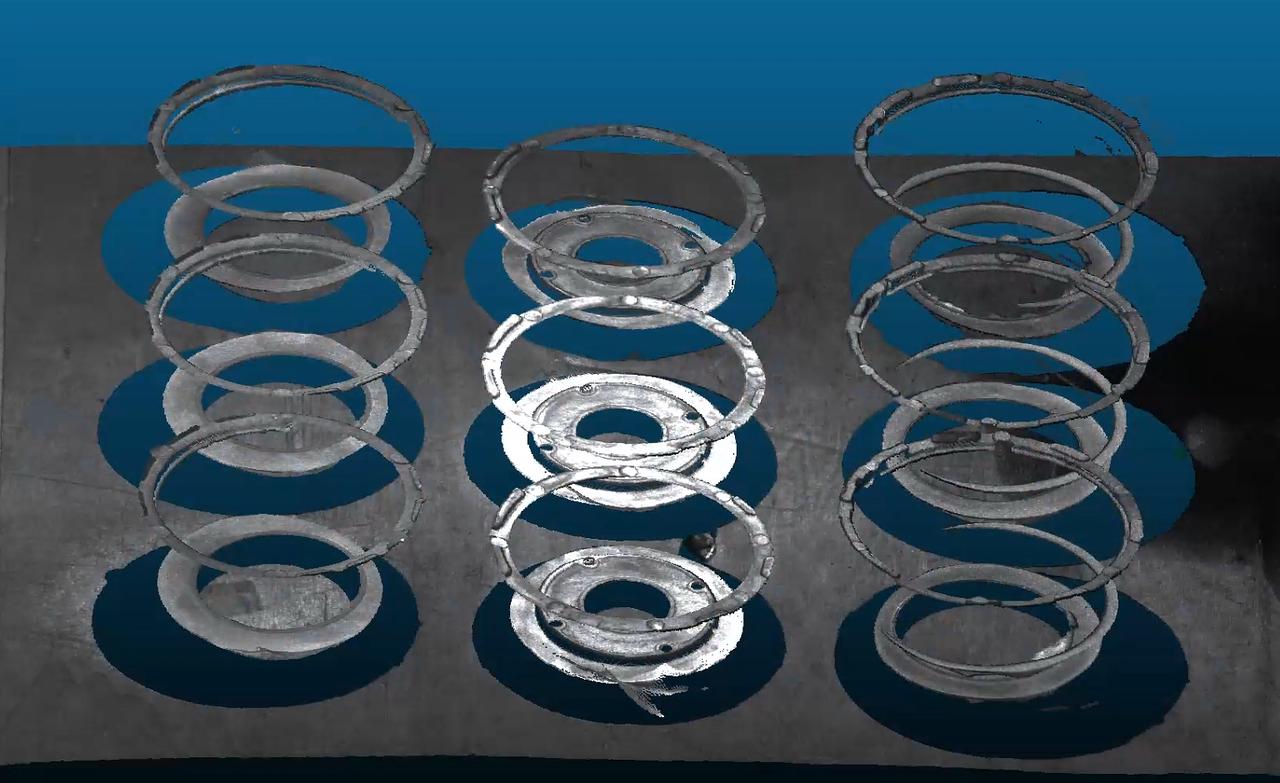
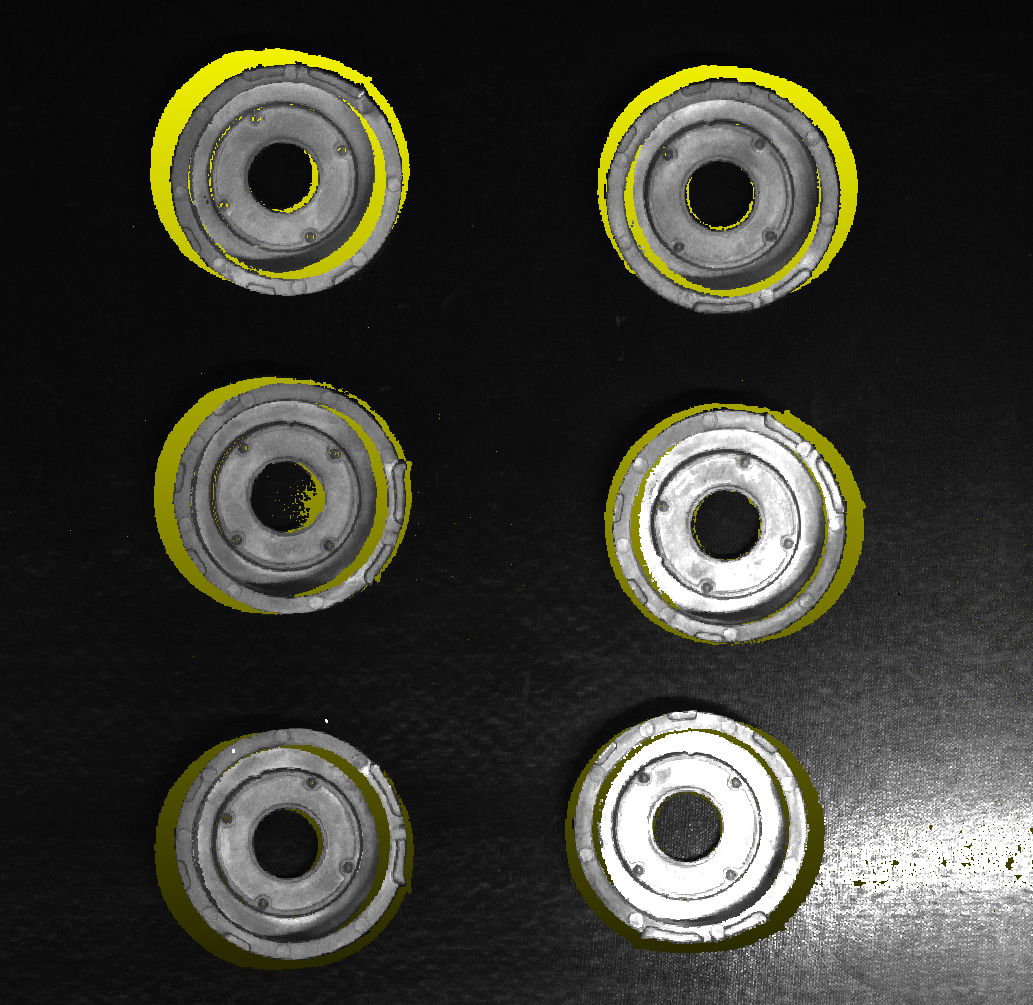
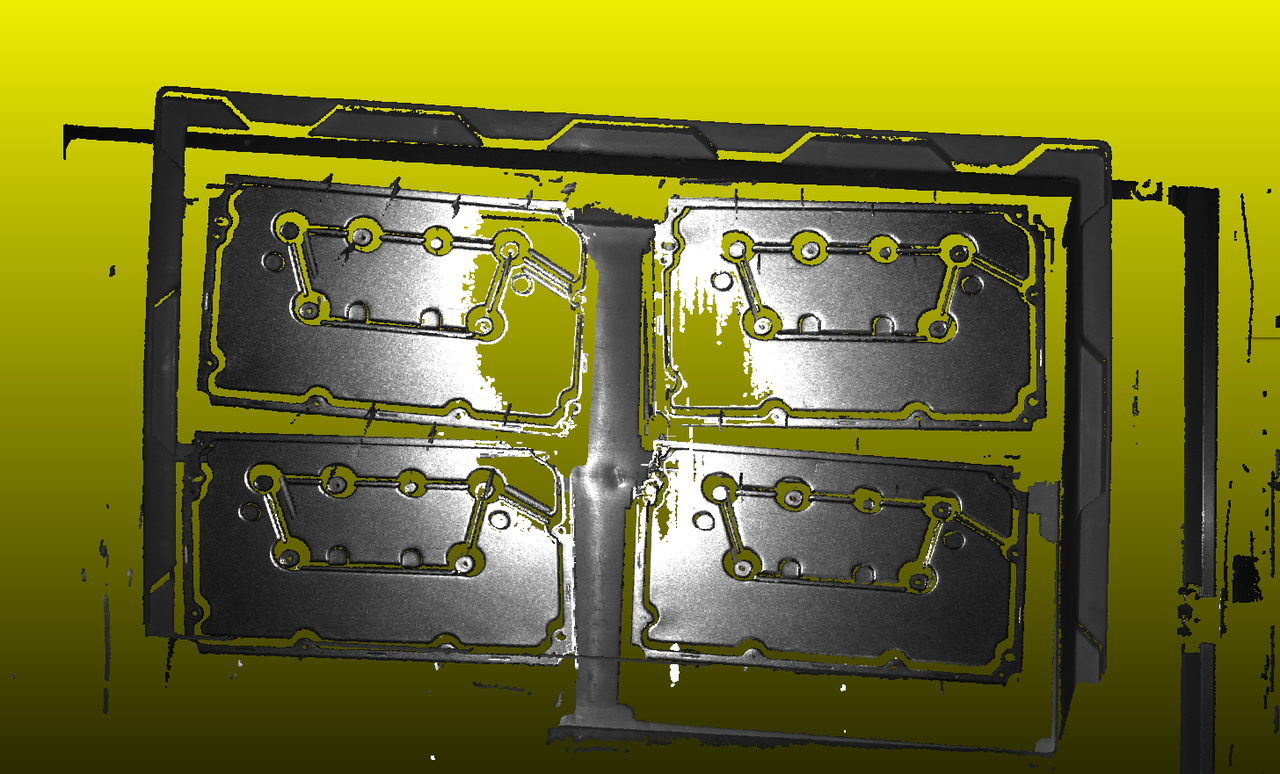
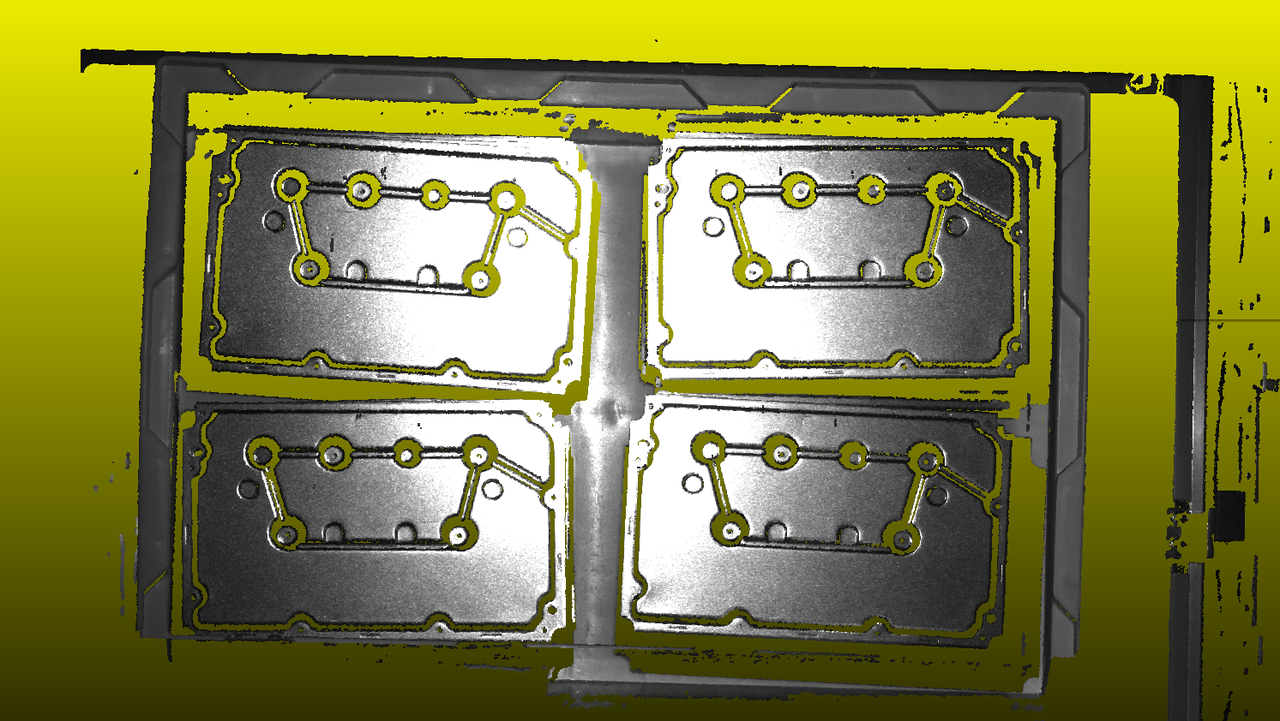
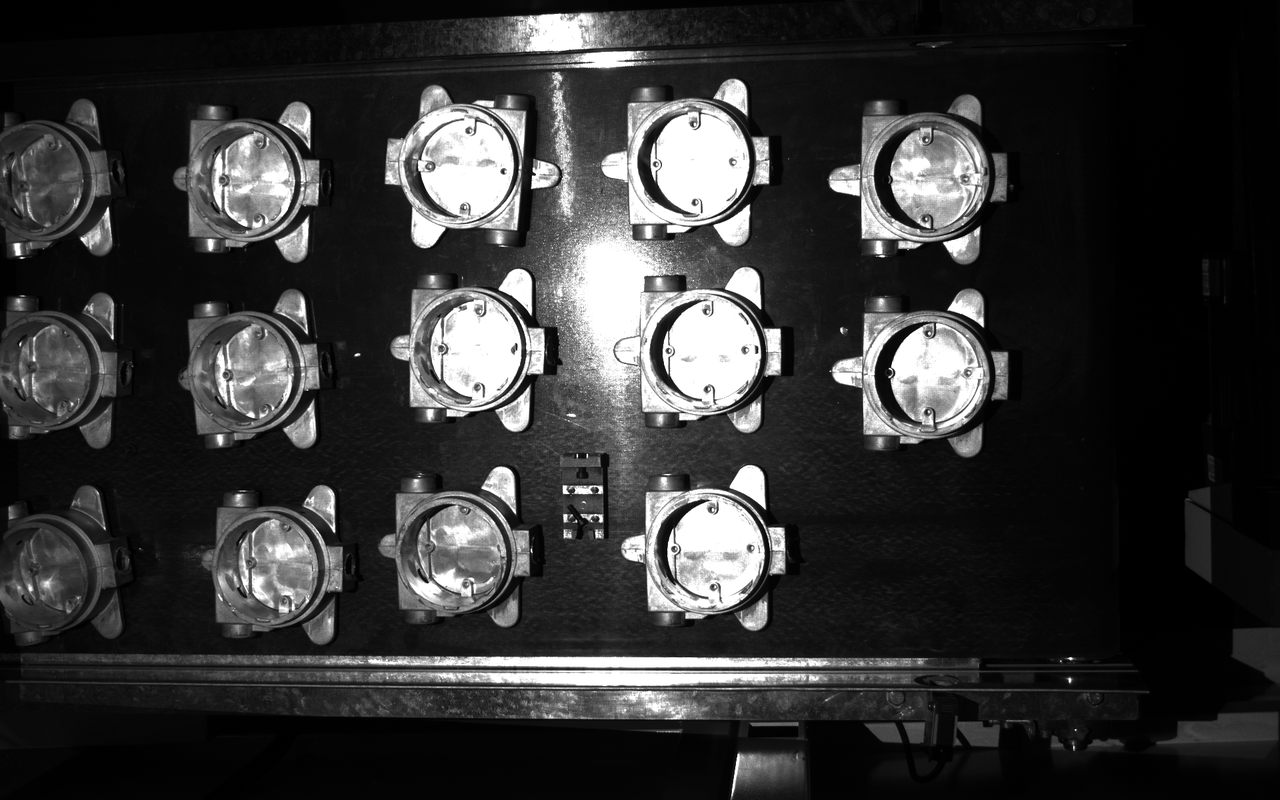
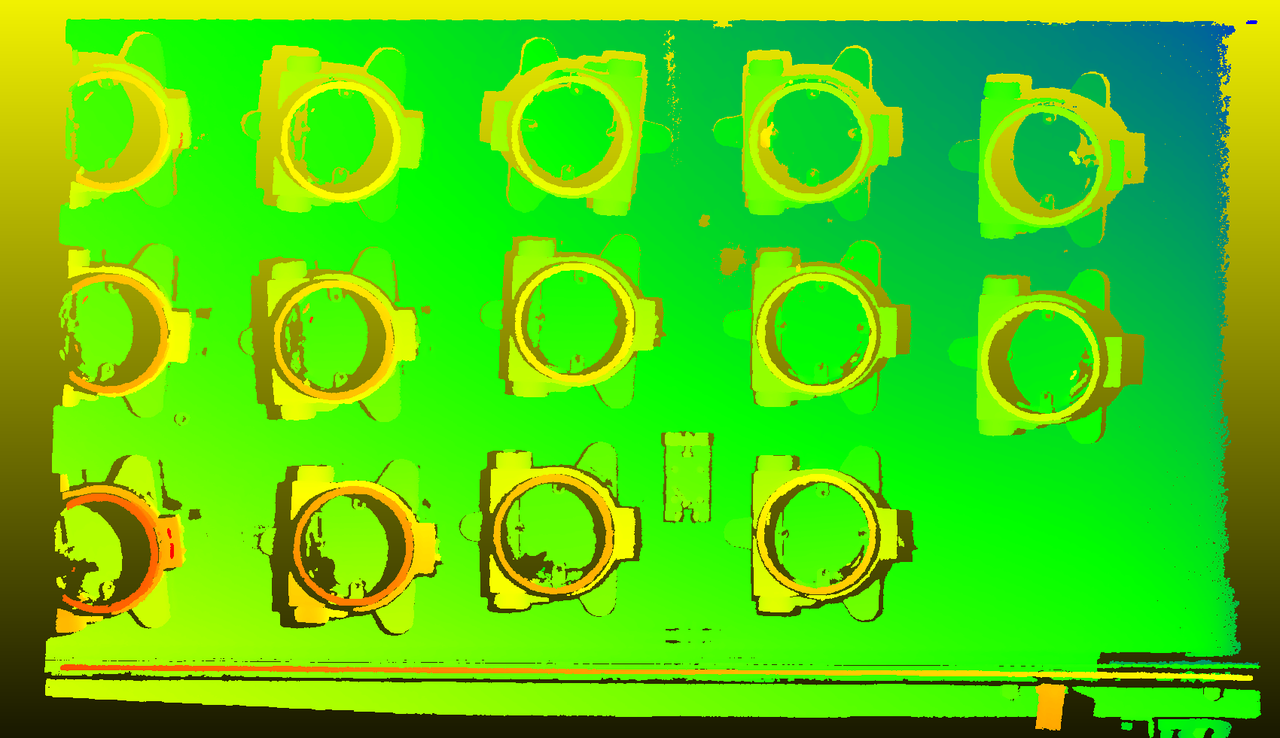
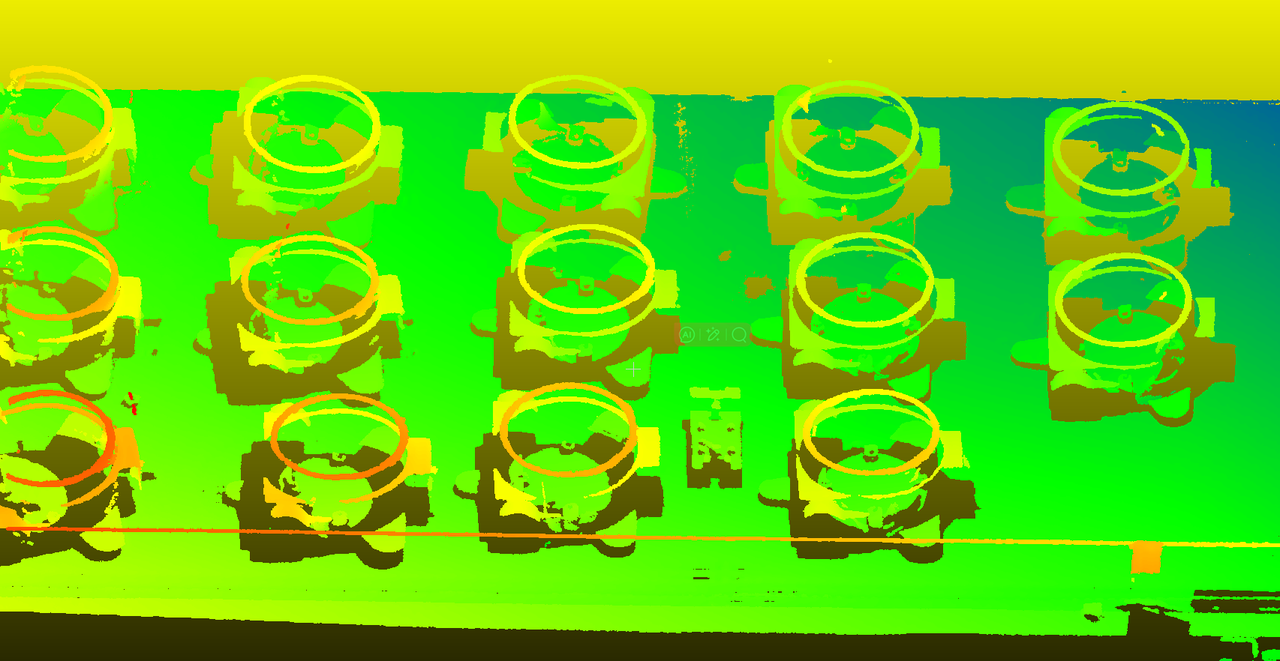
11、XEMA-L,金属平整环形工件
解决方法:该工件主要问题是圆环内壁因存在反光,导致大量噪点,所以最重要是噪点的过滤,既保留有效信息,又过滤噪点,在这几个过滤的比重中,要着重增大噪点过滤的比重,直到内壁的深度为黑色,说明将噪点过滤干净了,适当开启半径滤波和深度滤波即可.成像由于是金属工件,用两组HDR即可.
12、XEMA-LC,1000摄氏度以上高温工件调参
解决方法:对于这种高温工件,因为整体温度很高,不存在反光这一说,用单次曝光就可以,根据深度图调节曝光时间的大小就可以,对于噪点,可在半径滤波的基础上,额外加大深度滤波和噪点过滤这两个滤波的比重,对于悬浮空中的噪点有很好的过滤效果。

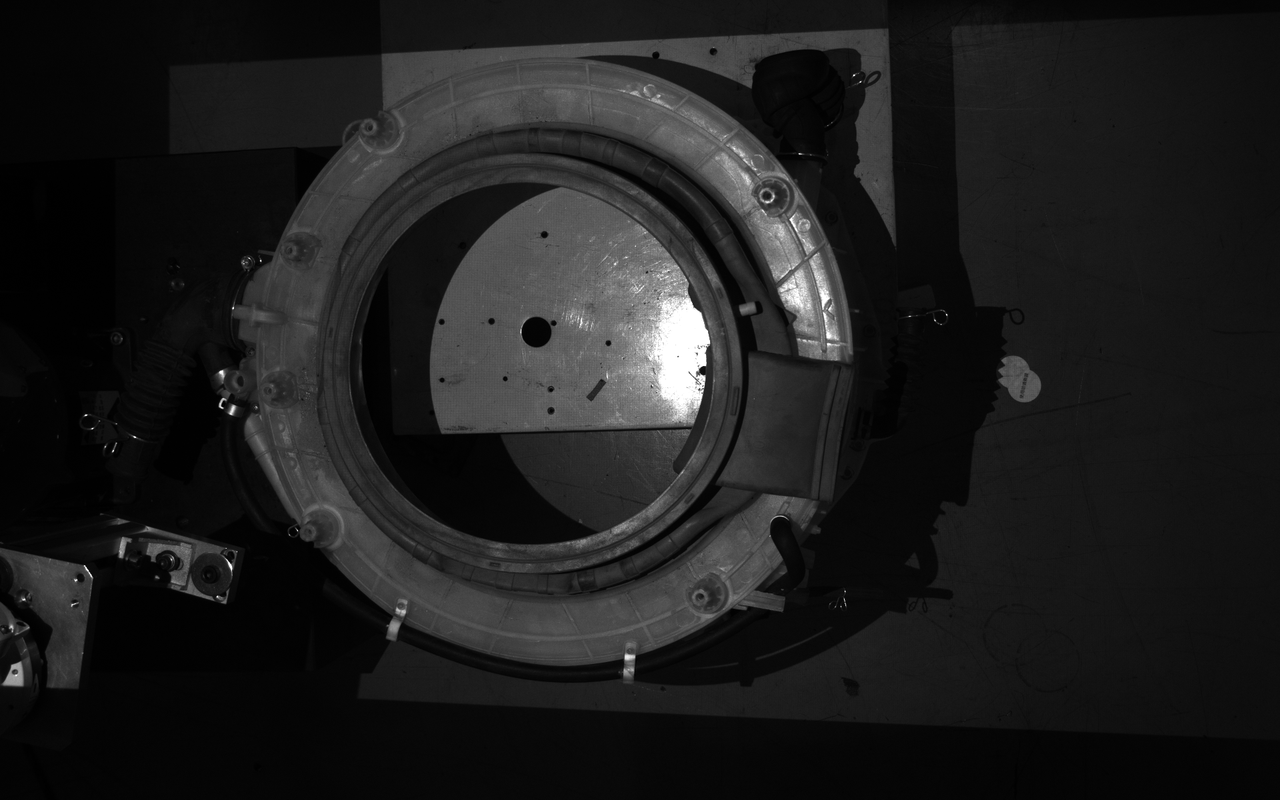
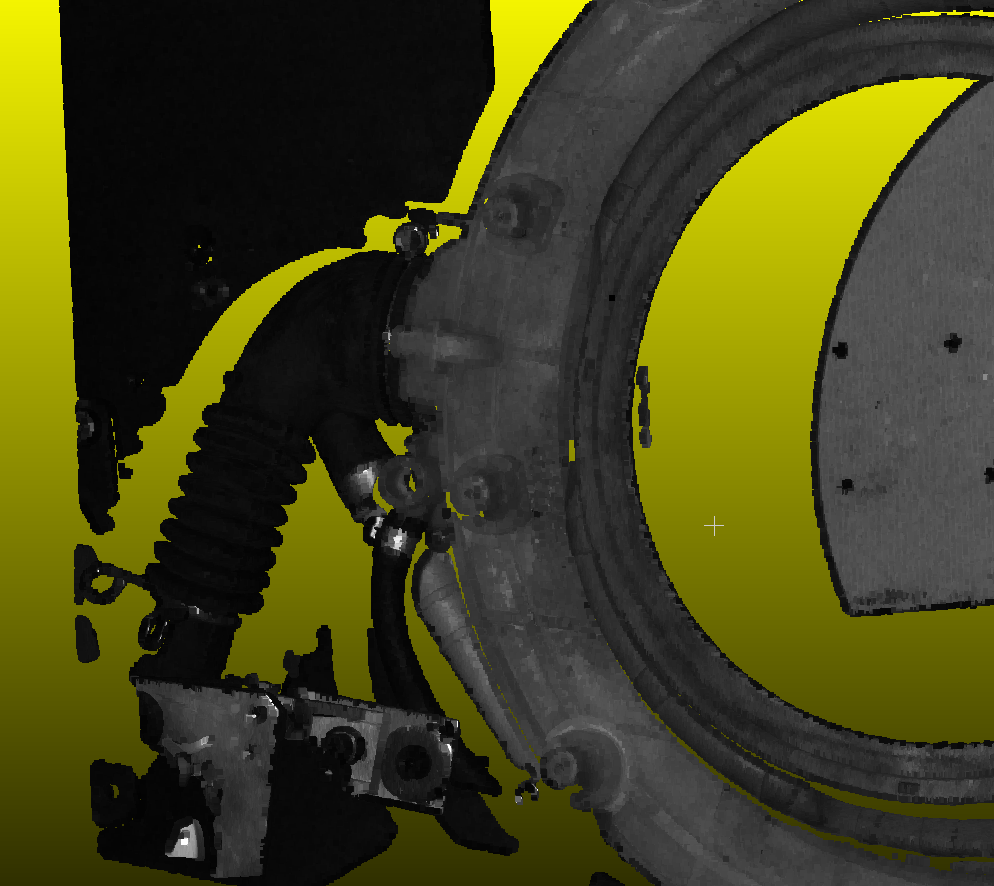
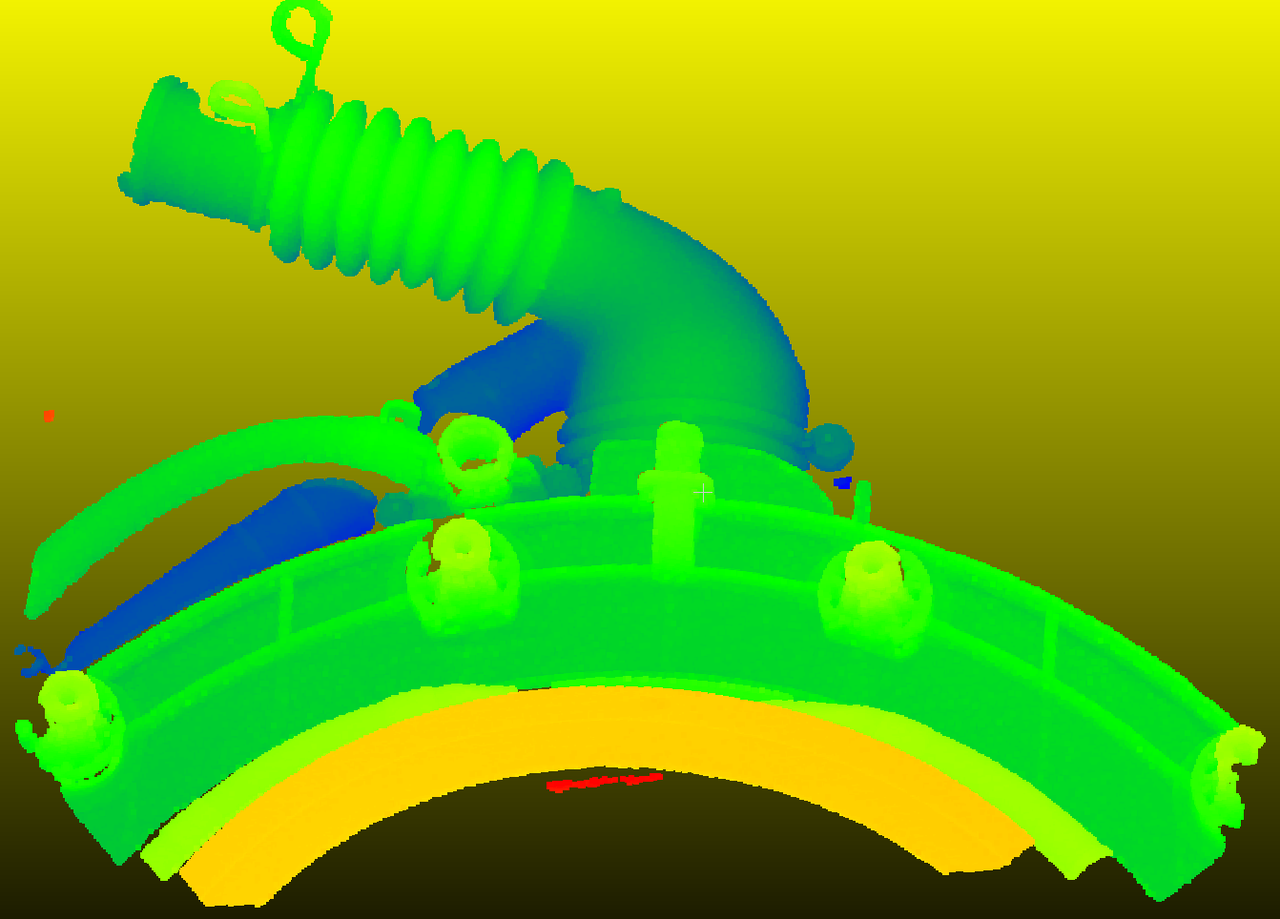
13、XEMA-L,洗衣机内胆螺纹定位
解决方法:该工件要保证点云的情况下,压缩拍摄时间,以最少的时间拿到数据,我们先观察,该工件是白色塑料材质,幸好没有局部过曝,还好,所以用一组单曝光就可以了,这样很节省时间,注意,时间要求1S内,我们这时就要开增益了,这样会节省曝光时间的设置,我这里用的5,太大,如果是8,10,点云的噪声就会很大,不行,这时曝光我就降低到了5000,点云就可以了,然后用增益,就不要用平滑了,平滑和增益在时间上是相克的,开增益再开平滑会很耗时,过滤我这里用的半径滤波和噪点过滤,注意,这时尽量不要用深度滤波了,半径滤波就够了,之所以开噪点过滤是因为它几乎不耗时的哦,最后所用时间为630ms就可完成拍摄,时间非常nice。
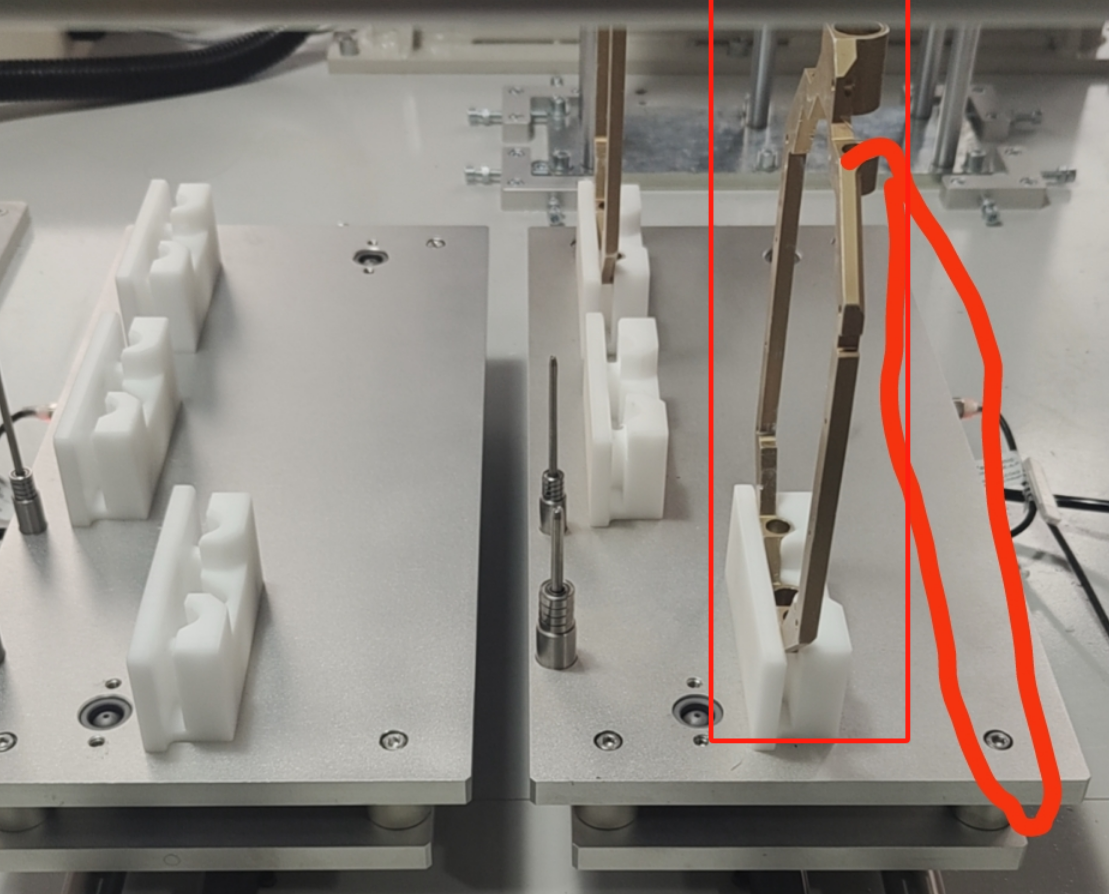
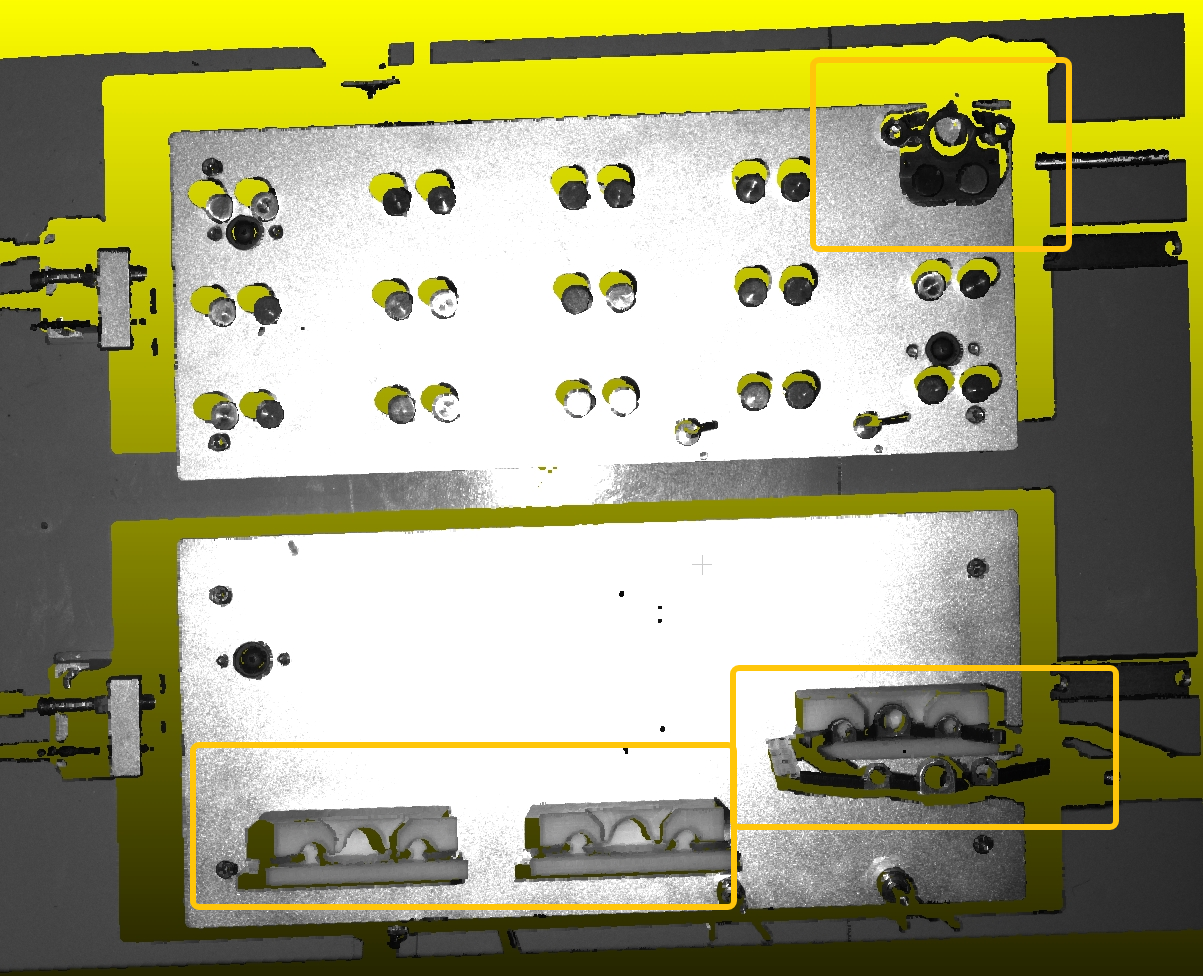
14、XEMA-S,白色塑料和金属组合
解决方法:对于有金属以及不放光的白色塑料,以及成像位置偏视野的边缘,所以我们选择两组曝光作为参数,大曝光兼顾边缘黑暗区域,小曝光兼顾中心位置,合适的数值就是大曝光调出边缘点云以及小曝光调出中心点云为准,很明显金属有立着的长条,在边缘必然会出现大量的噪声,这时可以打开反射滤波,半径滤波进行过滤,过滤的标准就是把噪点在深度图上显示为黑色就已经滤除,最后开个平滑,注意平滑会耗时,可根据时间要求选择数值的大小。


二、IP问题
1、现场提示不同网段
写解决方法
2、可以搜到相机IP但无法连接
情况1:网段错误
搜索相机,显示IP是192.168.5.233,提示“本机与相机不同网段”
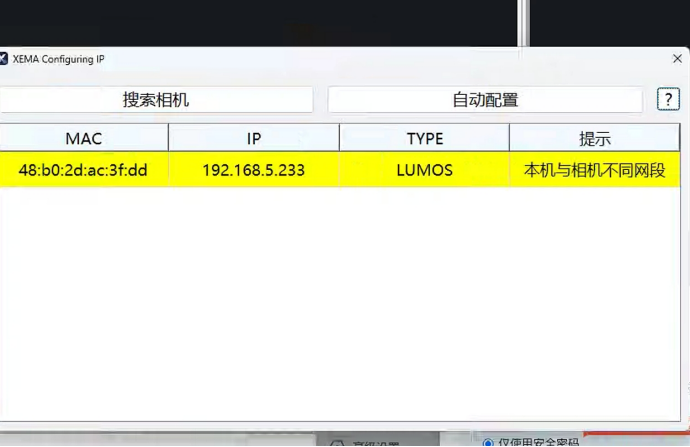
尝试PING相机,发现PING不通
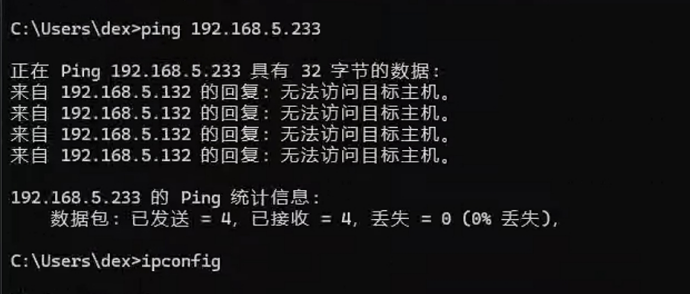
查看本机IP,发现有169.254.X.X、192.168.5.X、192.168.4.X三个网段
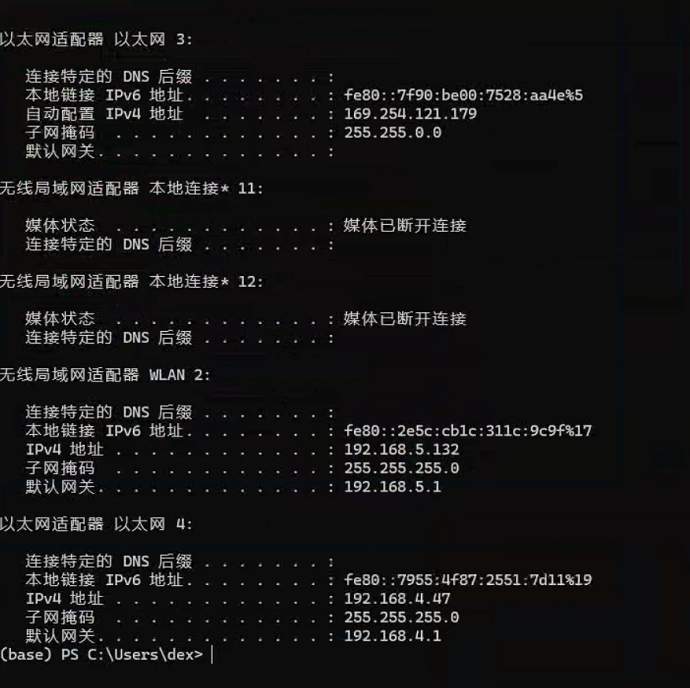
显然,原本可能是用的192.168.5.x通信的,改成直连了,插到其他网口,所以ping不通了
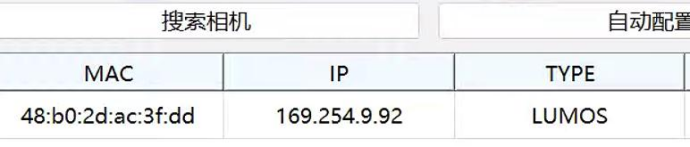
点击【自动配置】,把相机IP被更改到对应的网段,变成169.254.9.92,就可以连接成功了
情况2:IP冲突
局域网中,路由器下面的同网段两台设备配置了相同ip地址(相机和任意一设备),这会导致上位机和相机通信时,可能会被同IP的设备劫持。
举个例子:
假设终端1、终端2都设192.168.1.2
那么上位机通过网关发arp包 who is 192.168.1.2,两台终端都回包。则导致网关arp表冲突。
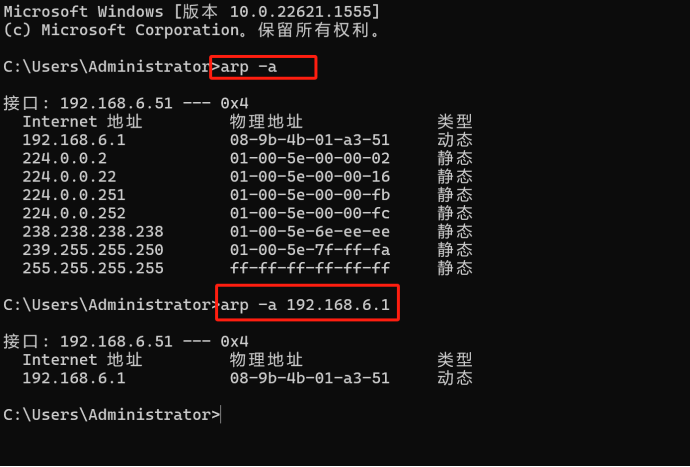
排查和解决方式为,通过在cmd中输入arp -a命令,查询 相机IP与相机的物理地址是否对应,如不对应可能代表存在IP冲突,需要修改IP。
参考:https://zhuanlan.zhihu.com/p/29011567
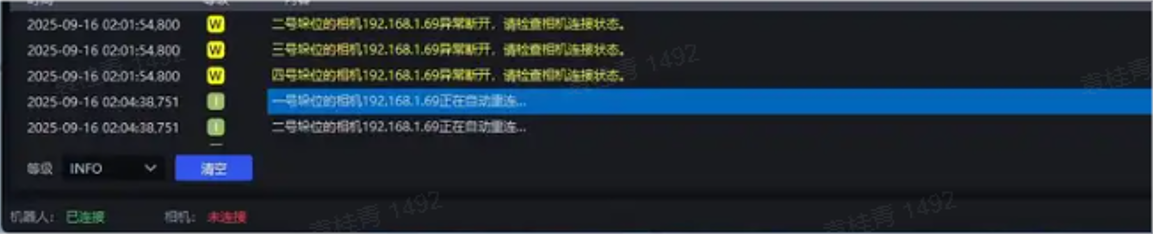
3、Finch、Xema相机异常断开连接甚至搜索不到
问题:相机异常断连后 PickWiz 自动重连,但相机重连后又断开,甚至出现相机配置界面搜索不到相机的情况
可能原因:现场网络不稳定(网卡IP配置冲突、网线损坏),网络太差导致搜索不到相机
案例1:网线损坏
解决方案:
首先排除局域网内ip重复冲突,相机断电,ping相机ip不通,插上相机电可以ping通则为正常;
相机ip地址应当为192.168.x.x开头的固定ip,若为169.254.x.x则需要修改相机、工控机为固定ip;
下载以下压缩文件并解压,然后打开终端运行解压后的 ping_ip.exe 工具,并在命令后加上 “相机的 IP 地址”(如:ping_ip.exe 192.168.1.69)测试 PickWiz 与相机之间的网络是否连通。
当相机异常断连/搜索不到时,若ping相机IP的结果显示 “超时”“丢包” 等异常,说明相机故障的原因就是网络不稳定。若ping相机IP的结果显示一切正常,说明相机故障的原因不在于网络,需要进一步排查相机硬件等其他异常情况。
三、现场外参校正问题
相机由于运输,温度,结构应力等多方面因素,会导致相机精度变差,以下是对于xema系列相机的一个详细的外参校正的方法:
XEMA系列相机外参校正方法
1,取图
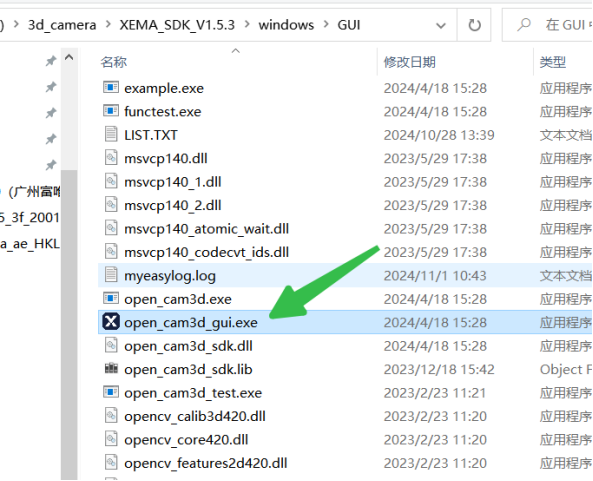
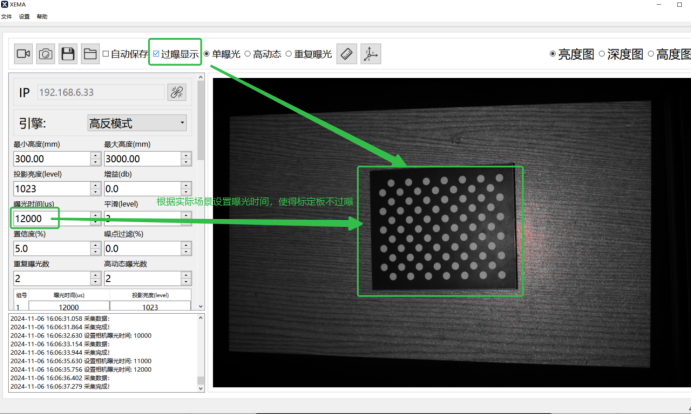
1)相机固定在工作距离下,sdk中打开open_cam3d_gui.exe,连接相机,将标定板平放到视野正中心,采集,调节最佳的曝光时间,使得标定板刚好不过曝;例如:
2)在gui都在路径,新建一个文件夹储存采集图片,取名为:capture;
3)开始取图,需要拍摄 5 组图片,进入sdk_gui所在路径,鼠标右键打开终端,运行.\open_cam3d.exe,找到采图指令(如下图红框指示):
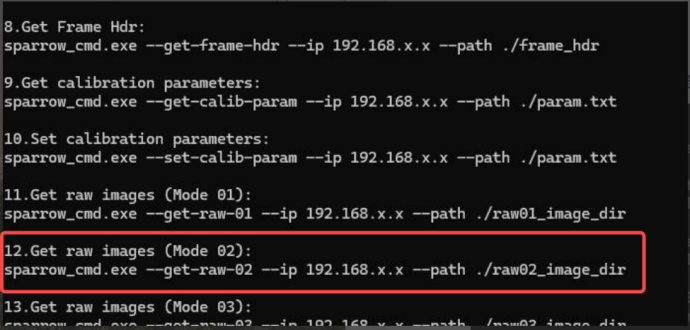
4)执行拍照命令:./open_cam3d.exe --get-raw-02 --ip 192.168.6.63 --path ./capture/00;
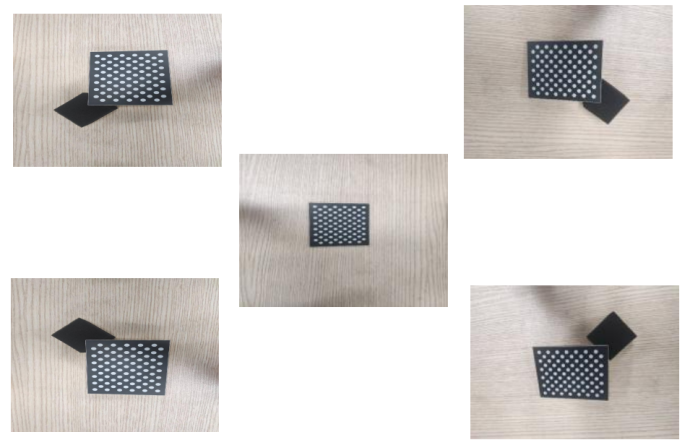
192.168.6.63为相机IP,根据实际相机IP对应更改即可,00为第一组图片,一共5组00-04,每个位置采集1个位姿,如下图所示;中心平放,视野的四个角垫起各一张;
2,相机标定
先将相机原本的标定文件导出到本地,还是进入gui都在路径,右键打开终端,执行指令:open_cam3d.exe --get-calib-param --ip 192.168.6.63 --path ./param.txt
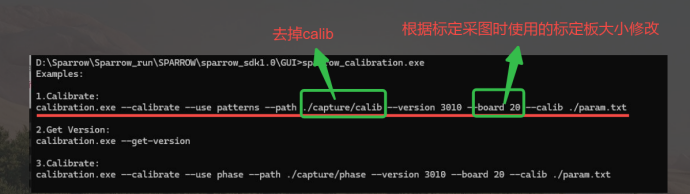
导出后,回到终端,打开校正指令:终端运行.\calibration.exe,执行下面的校正指令:
./calibration.exe --correct --use patterns --path ./capture/ --version 3010 --board 20 --param-in ./param.txt --param-out ./param.txt
(IP根据实际相机IP更改,board 20是指标定板大小,根据实际更改)
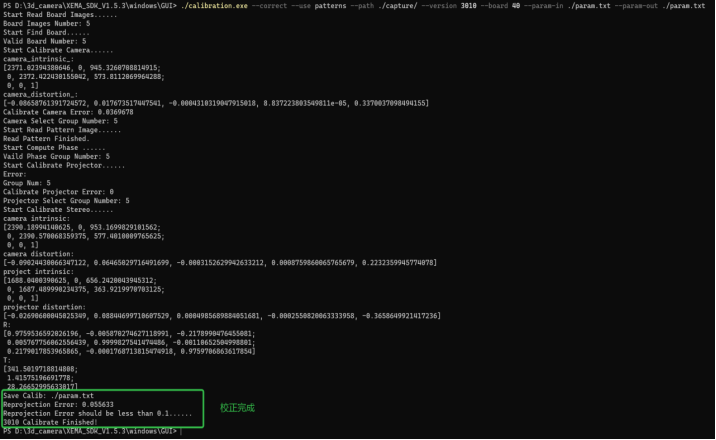
3)等待校正结束后,终端执行写入标定参数:
执行./open_cam3d.exe --set-calib-looktable --ip 192.168.x.x --path ./param.txt,等待写入;
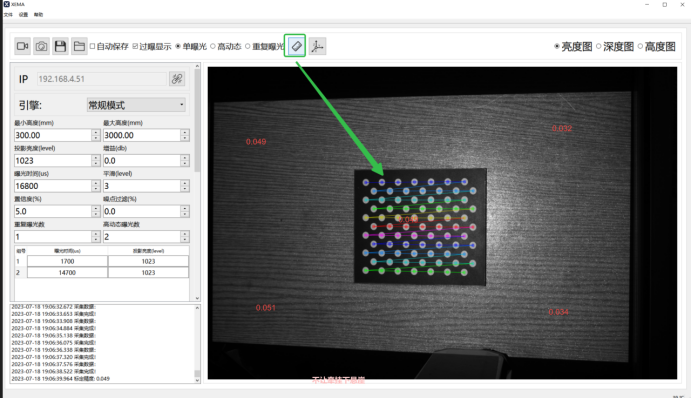
4)写入标定参数后,GUI连接相机,放置标定板采集,查看精度值,例如;
四、其他问题
1、finch部分相机出货版本,彩色模式不兼容高动态,需要更新0925固件
2、finch相机在彩色模式下的手眼标定转黑白模式时标定坐标系发生改变导致抓取异常
问题:
解决方法:彩色模式和黑白模式下的手眼标定可进行转换,暂时提供以下工具进行更新,后续该功能将集成到软件中。
3、结构光相机点云异常缺失问题:
排查是否灯光频闪,如果频闪请关灯看是否改善;
排查是否过曝,过曝区域的点云会存在缺失,如果外部光源导致的过曝(镜面反光,很亮),请遮光,如果曝光值(例如大于80000)过大导致,请减少曝光值;
排查是否欠曝,物体太黑,曝光时间太短会导致,解决办法,增加曝光时间及投影亮度;
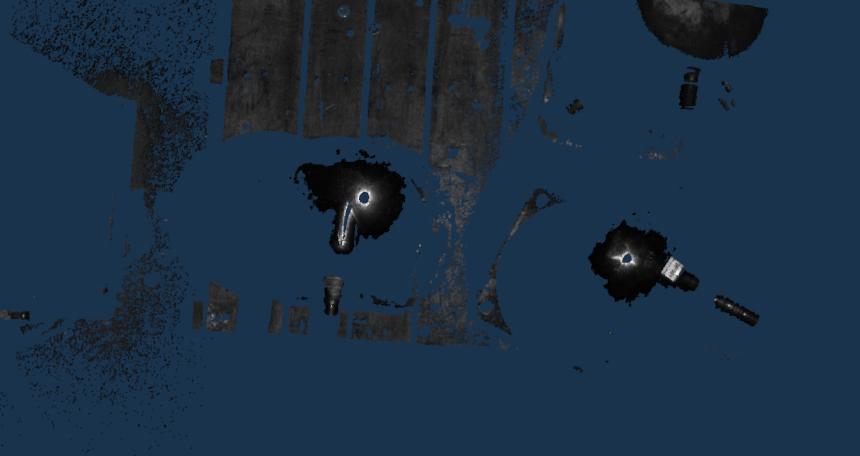
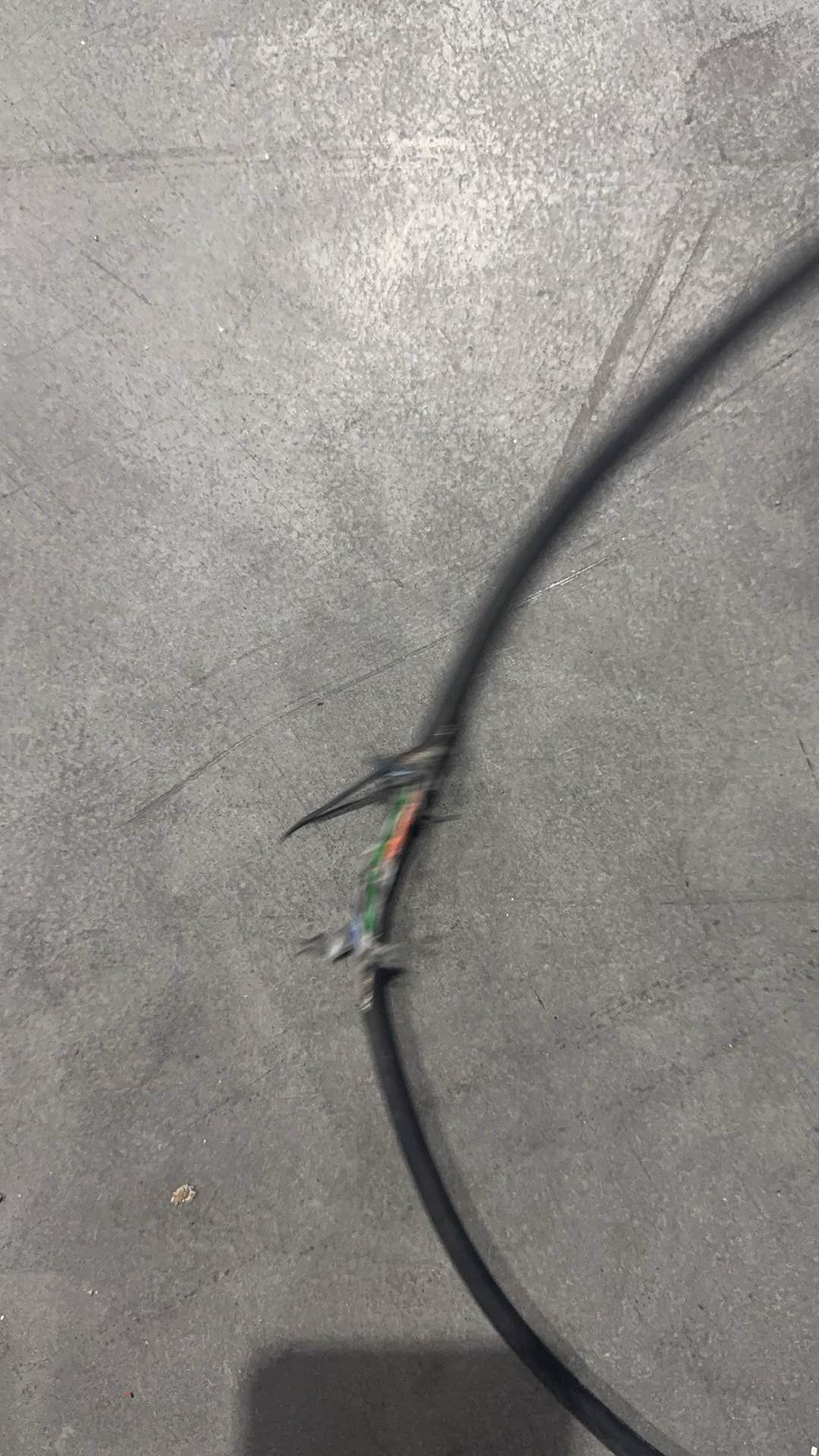
排查是否镜片脏污,脏污会导致点云异常缺失,解决方法:使用镜头布擦拭相机镜片;
如下所示关灯后仍然点云缺失,为镜片脏污导致;
4、XEMA相机螺纹胶批次查询:
螺纹胶增加了机器的抗震动能力,在眼在手上的项目表现效果更佳;
自行查询相机序列号,序列号中包含相机的生产日期,25年10月后所生产机器为打螺纹胶的,否则无螺纹胶;
5、结构光相机节拍过长:
部分参数参考节拍(表格)
排查网络测速;
固件信息查看;
联系相机支持人员;