外观
视觉计算配置操作指南
视觉计算配置是对 PickWiz 视觉计算全过程的自定义系统配置,用户可根据具体场景需求自定义系统行为,通过配置“数据与存储设置”、“抓取逻辑设置”,确保 PickWiz 在抓取精度、抓取节拍和抓取稳定性之间达到最佳平衡,引导机器人实现精准高效抓取。
在 PickWiz 主界面点击

进入 视觉计算配置界面,如下图所示。
1. 数据与存储设置

1.1 输入数据
视觉计算时,输入相机数据或历史数据到对应场景的工作流中,工作流对输入数据进行2D识别、3D计算、抓取点处理后,在工件上输出抓取点。
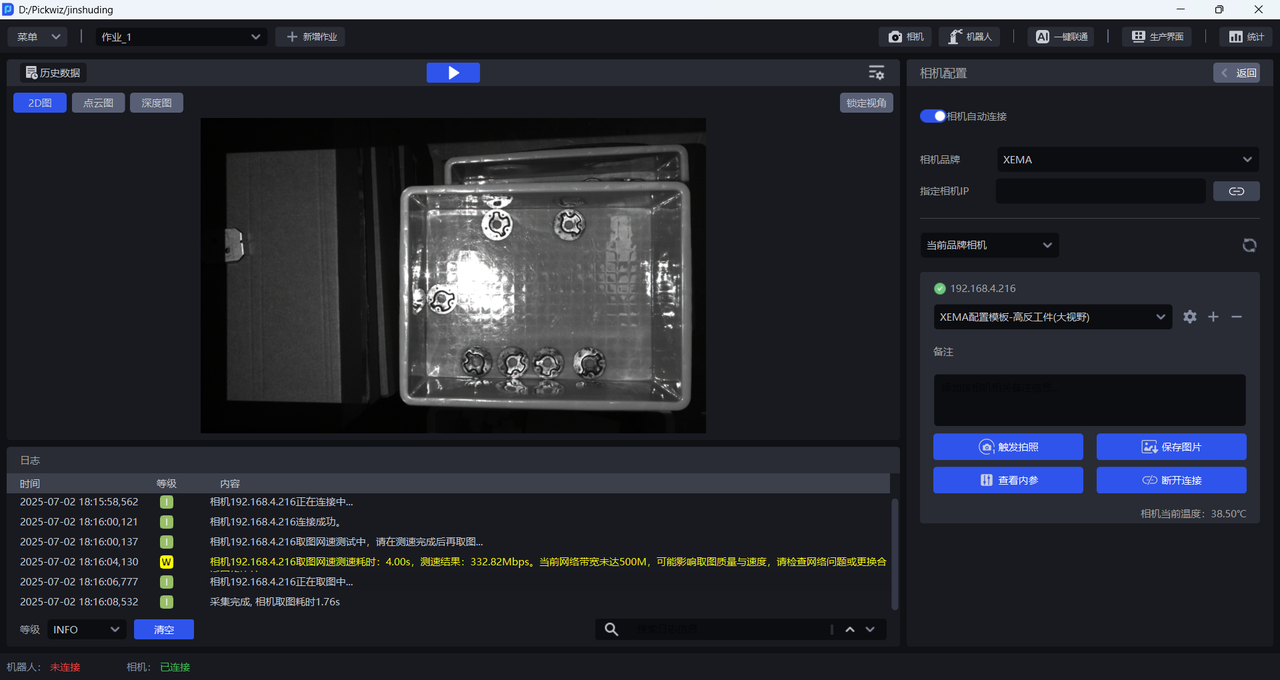
1.1.1 相机数据
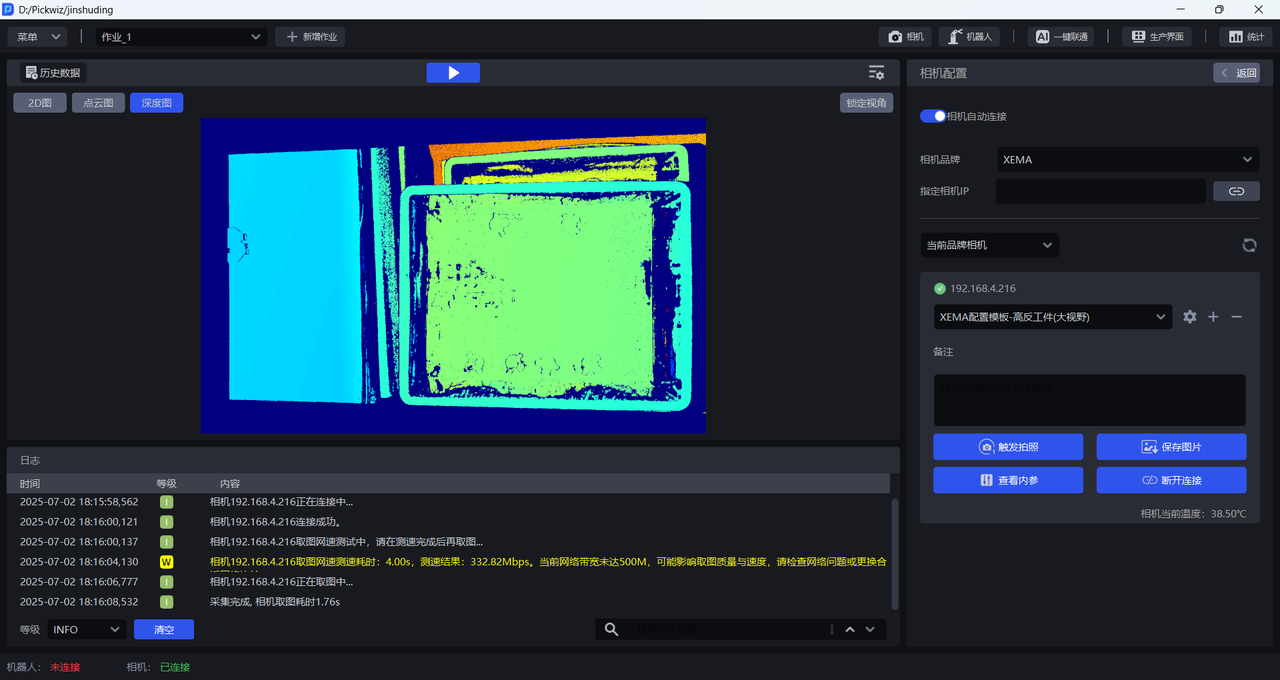
相机数据是相机实时采集的场景数据,包括2D图、深度图、点云图,如下图所示。
输入相机数据进行视觉计算的流程如下:
(1)新建项目和作业,连接相机和机器人并配置完成作业信息,具体操作请参照 项目操作指南、 作业操作指南、 相机连接与调参指南、 机器人配置与通信操作指南。
(2)点击运行后,相机数据输入到工作流中进行视觉计算,最后输出抓取点,日志开头会显示数据来源为相机数据,如下图所示。

1.1.2 历史数据
历史数据是 Pickwiz 过去一段时间内的运行记录,保存了视觉计算各个过程的输入数据和输出结果,用于排查故障原因,如下图所示,具体说明请查阅 历史数据使用指南。
输入历史数据进行视觉计算的流程如下:
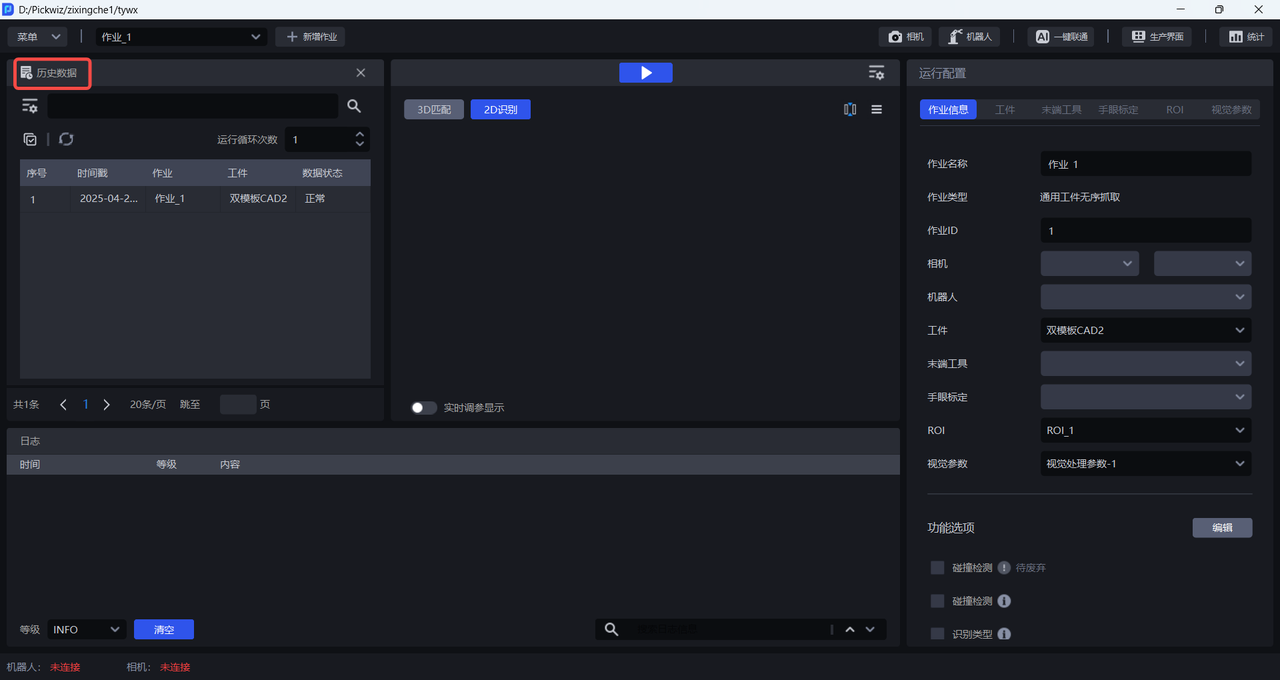
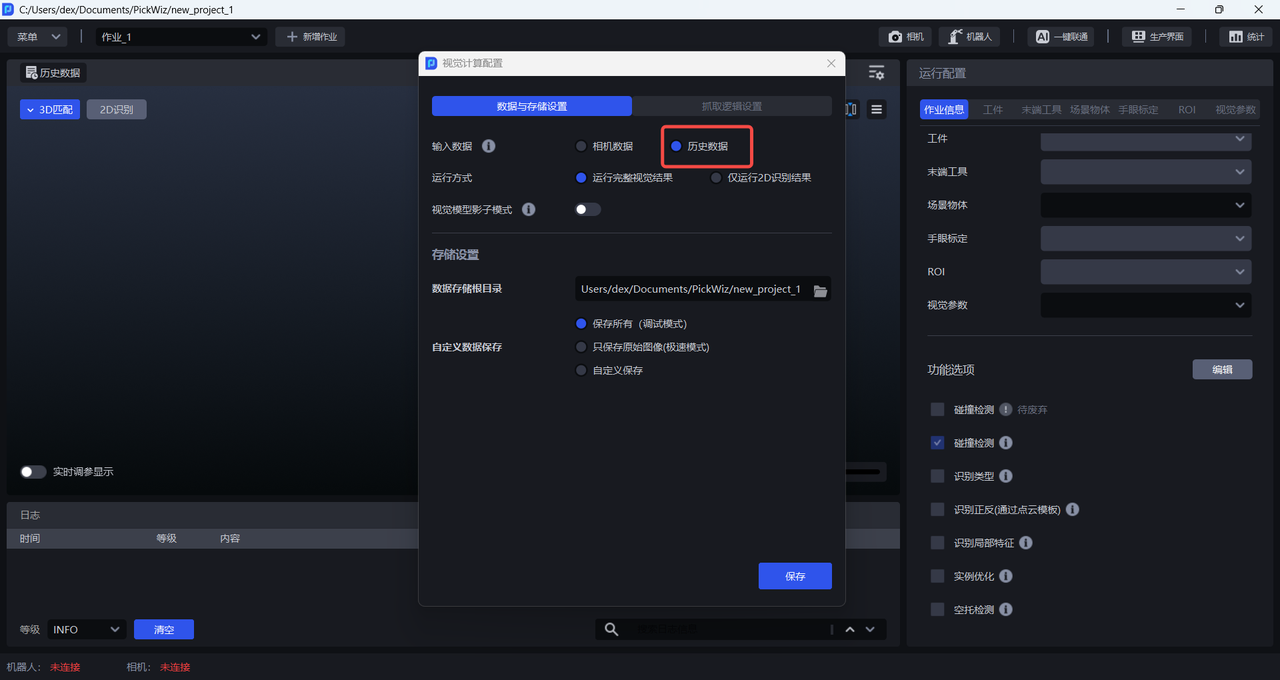
(1)点击 历史数据 打开历史数据弹窗
(2)打开 视觉计算配置 弹窗,切换 输入数据 为 历史数据 ,输入历史数据可选 运行完整视觉结果 和 仅运行2D识别结果 。
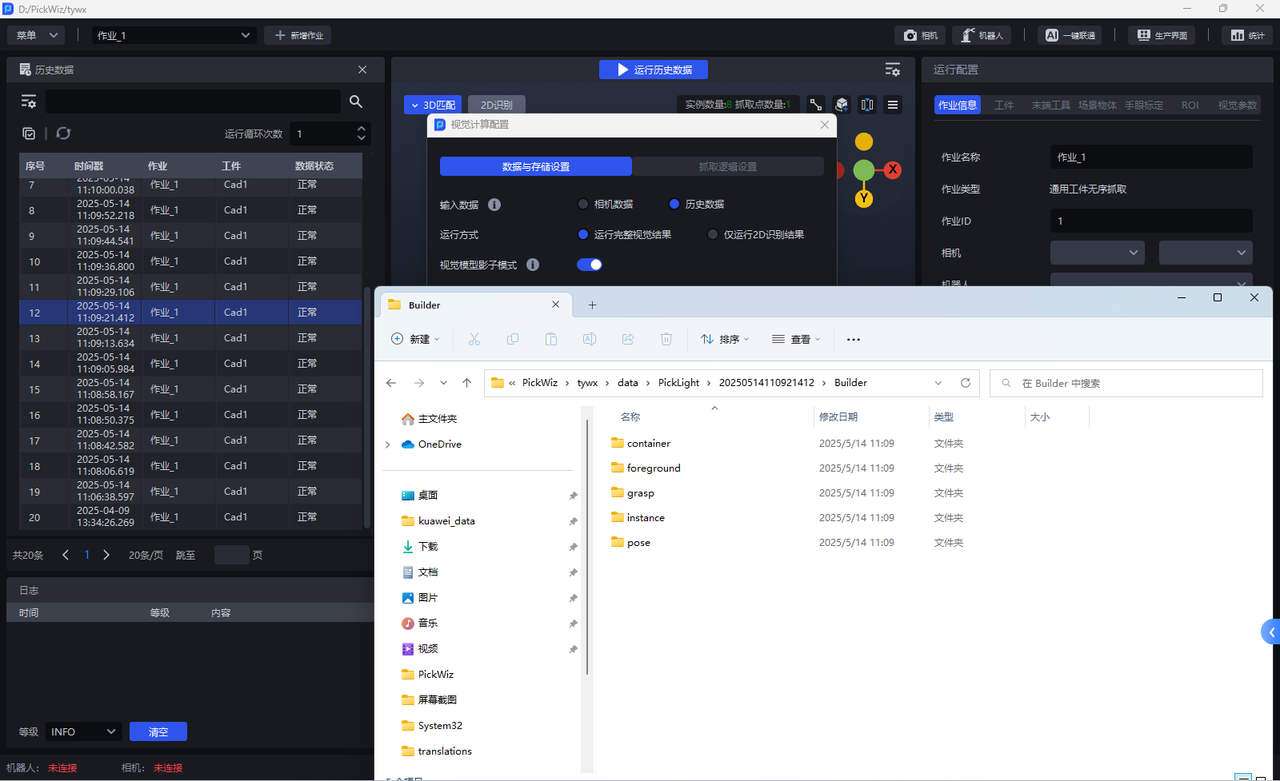
选择 运行完整视觉结果 会保存历史数据重新运行的完整记录,如下图所示。
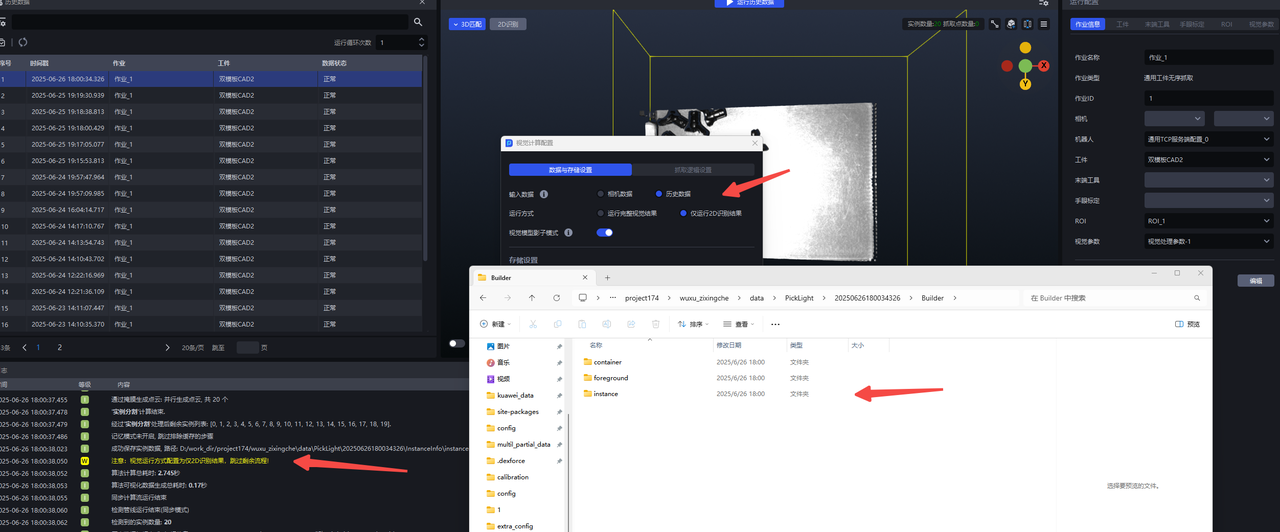
选择 仅运行2D识别结果 ,只会保存该条历史数据重新运行的2D识别结果(Builder文件夹只保存前景节点foreground、料框检测container、实例检测instance,不保存姿态估计节点pose、抓取点生成节点grasp),如下图所示。
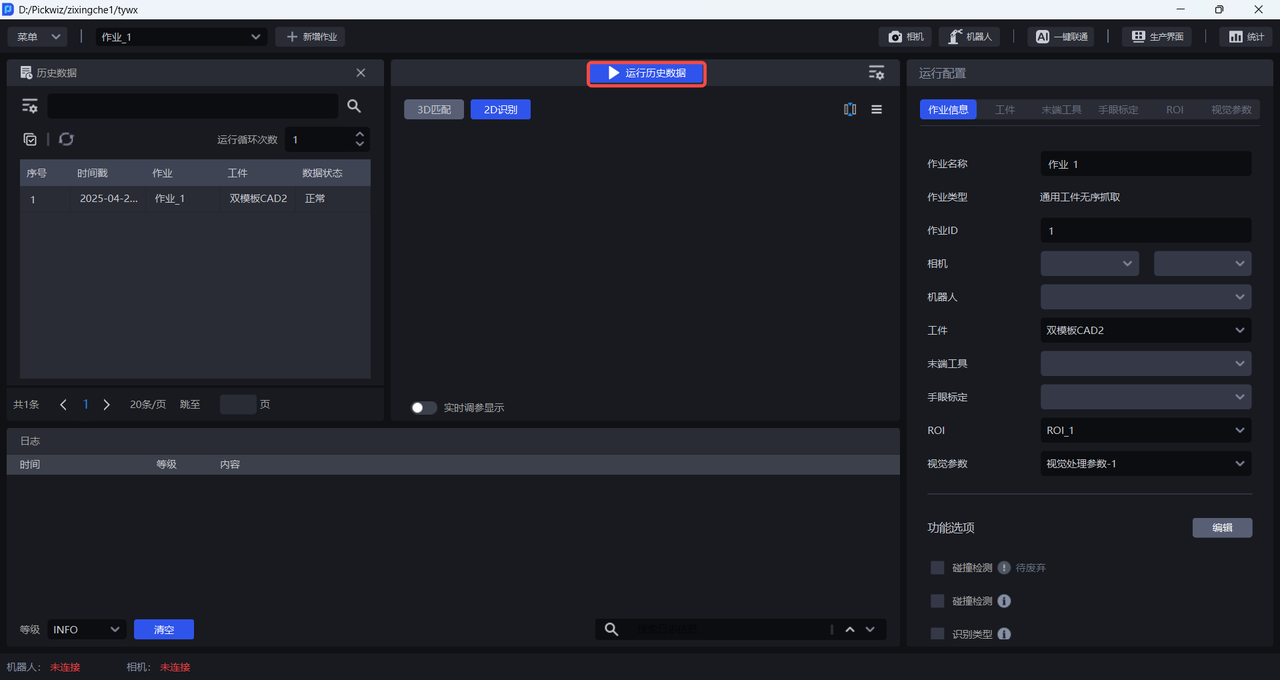
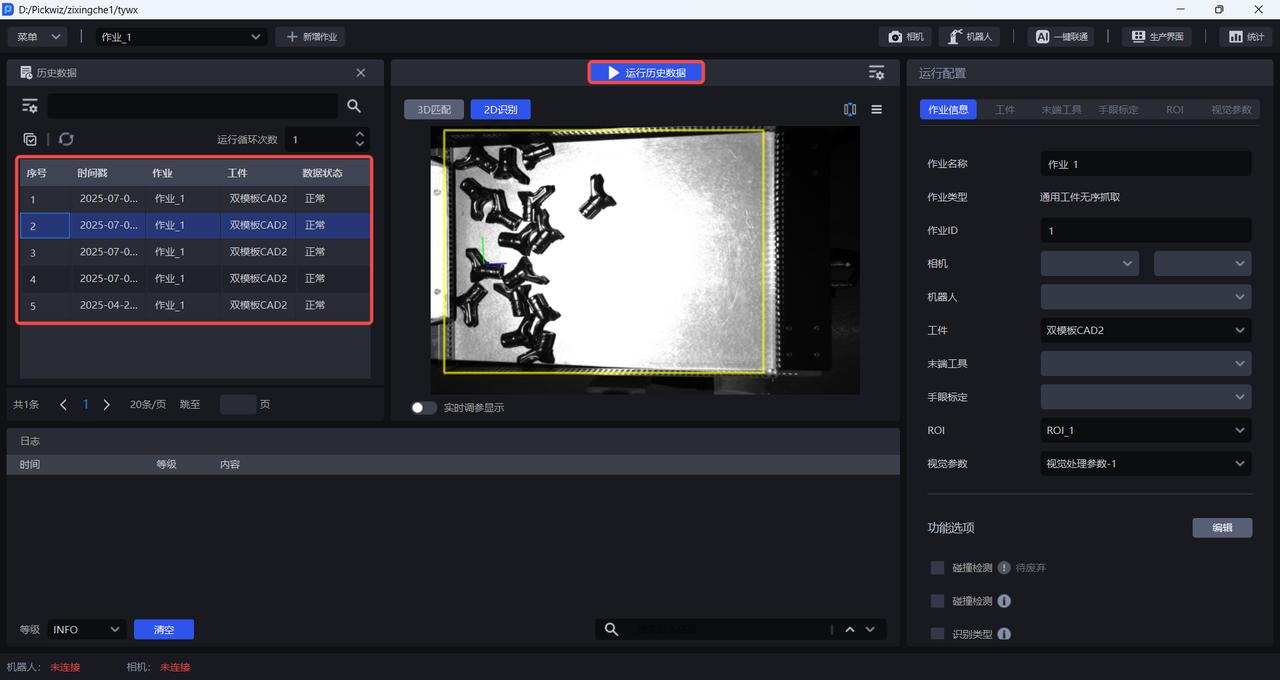
(3)切换后,运行按钮变成 运行历史数据 按钮,如下图所示。
(4)选中一条历史数据,再点击 运行历史数据 按钮,即可将历史数据输入到工作流中进行视觉计算,最后输出抓取点, 日志 开头会显示数据来源为历史数据,如下图所示。
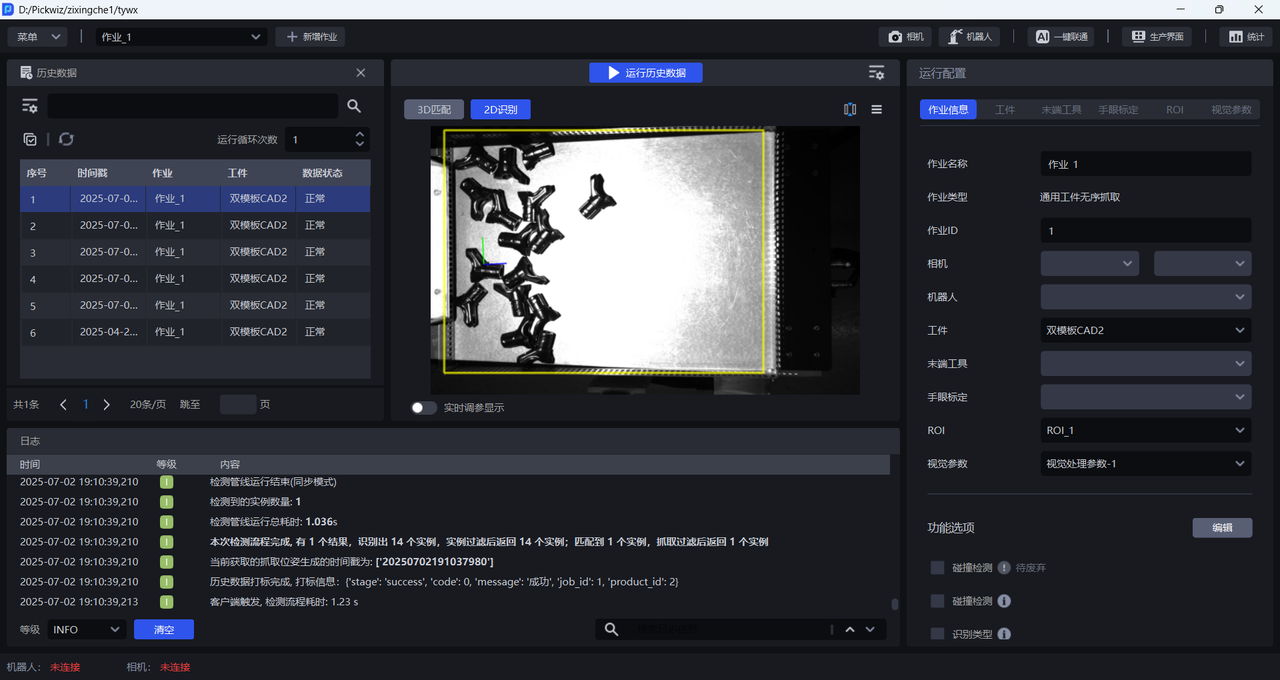

输入历史数据进行视觉计算前,无需连接相机和机器人,也无需配置作业信息,工作流会使用当前作业配置对历史数据进行视觉计算。
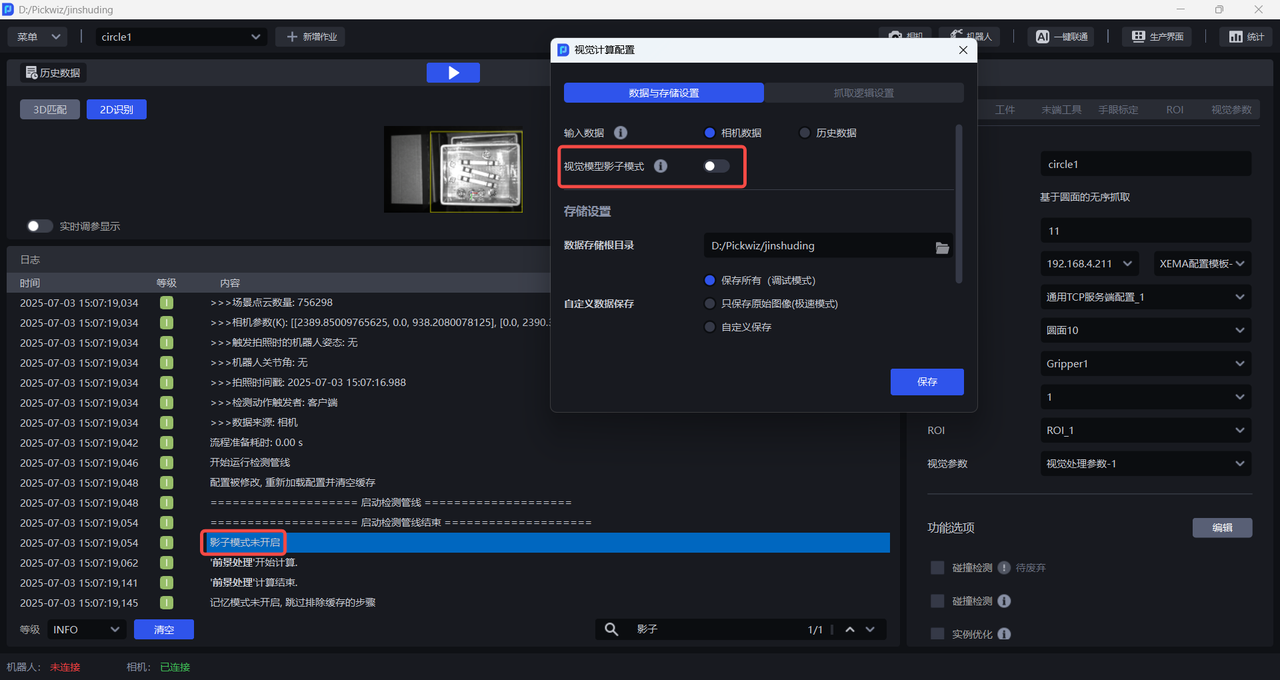
1.2 视觉模型影子模式
开启后,系统将保存作业运行的数据,其中机器人触发的数据会运用于工件模块下的视觉模型影子训练,优化模型识别效果。
若关闭该选项,则作业运行不保存影子模式数据,如下图所示。
开启该选项后,运行作业会保存影子模式数据,如下图所示。
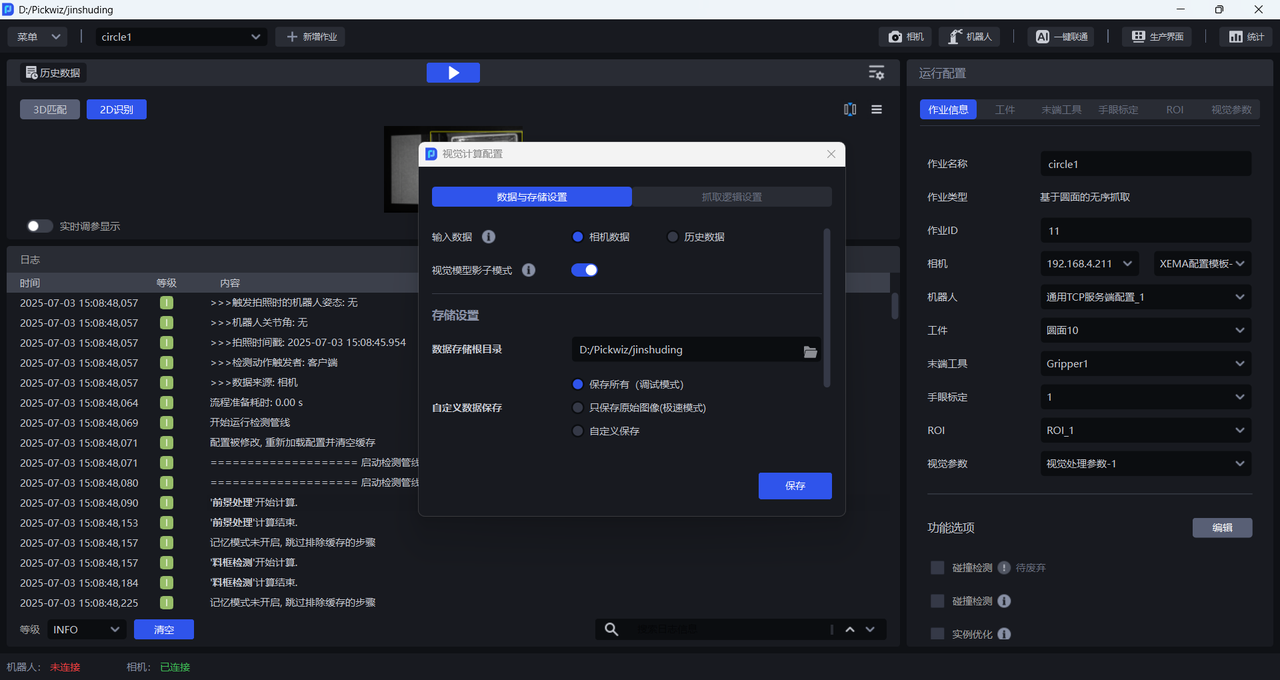
1.3 存储设置
1.3.1 数据存储根目录
数据存储根目录即项目的存储路径,与新建项目时选择的项目路径一致,不可修改。


1.3.2 自定义数据保存
自定义数据保存即保存视觉计算过程中的内容,可选择 保存所有(调试模式)、只保存原始图像(极速模式)、自定义保存。

- 保存所有(调试模式),即保存视觉计算全过程的输入数据和输出结果,如下图所示
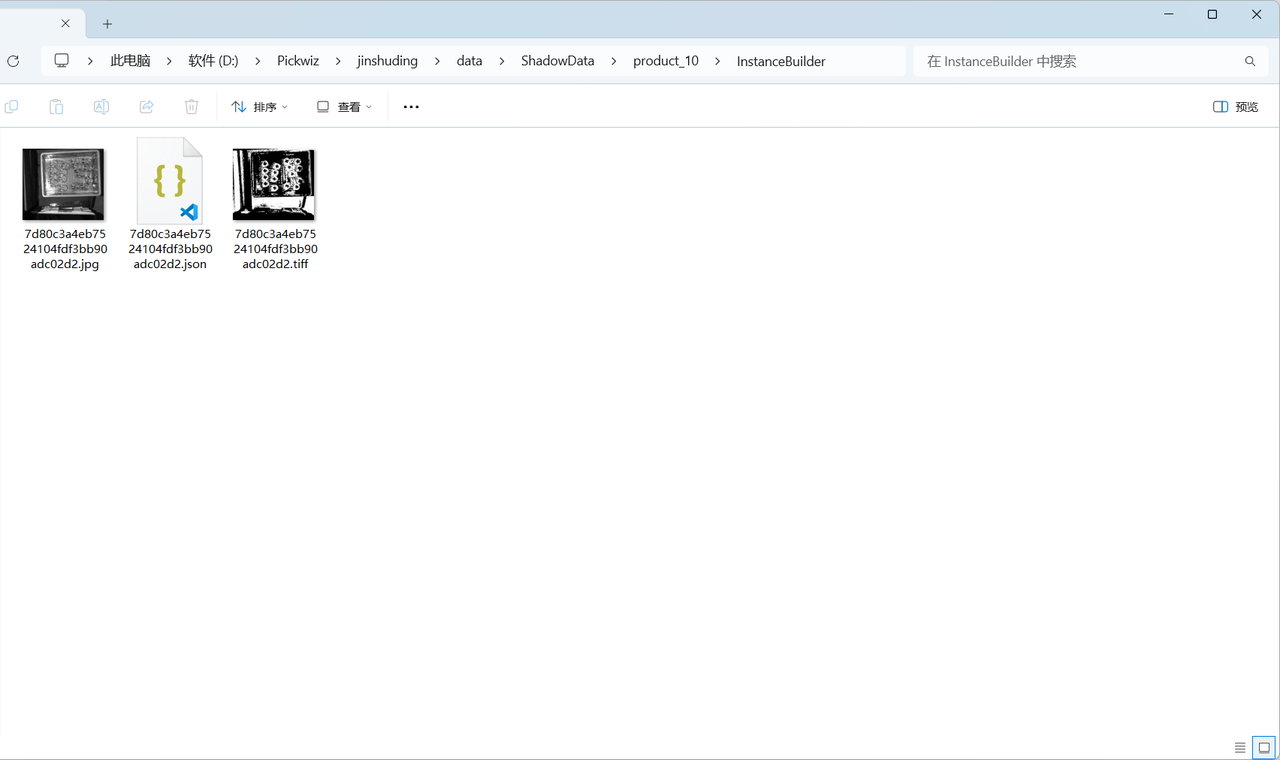
- 只保存原始图像(极速模式),即只保存原始的2D图和深度图,如下图所示。
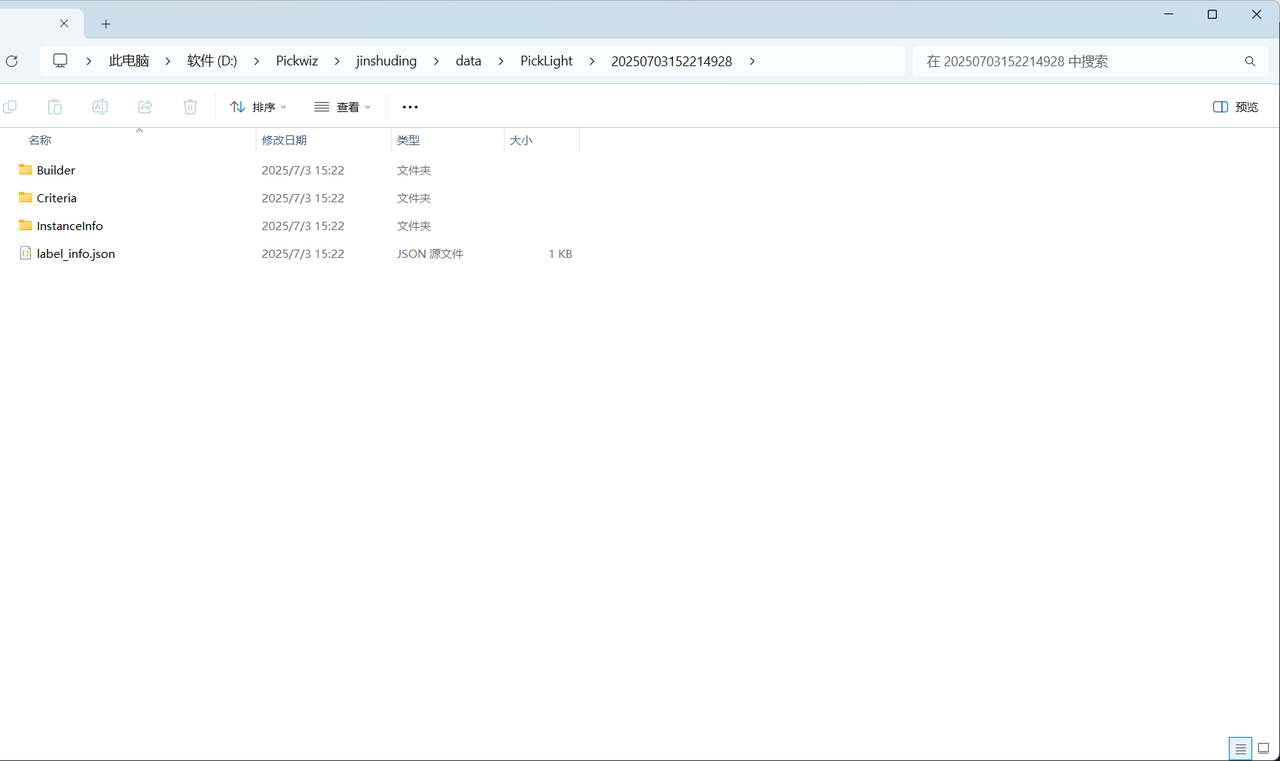
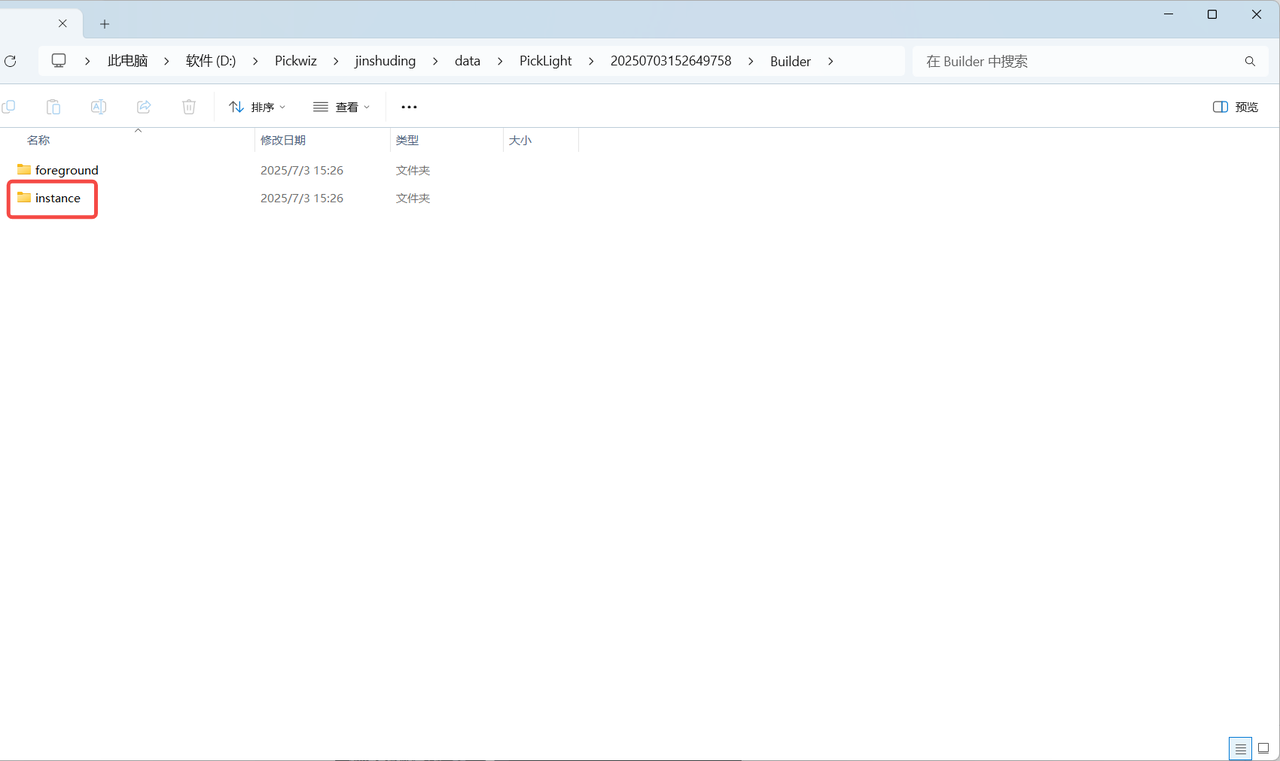
- 自定义保存,即可选择性保存视觉计算过程的内容,适用于现场生产时需要对特定数据进行保存,方便后续查找。如下图所示,勾选2D识别,在历史数据文件夹中保存了instance文件夹。

2. 抓取逻辑设置
2.1 视觉计算加速
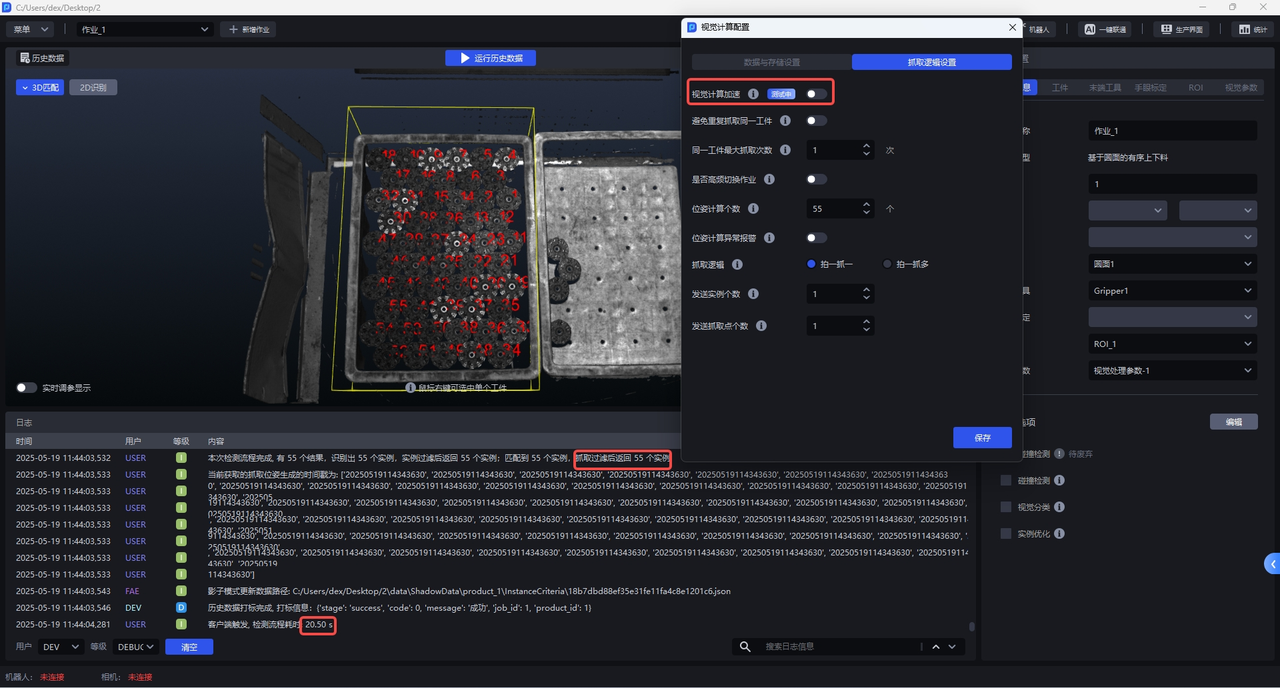
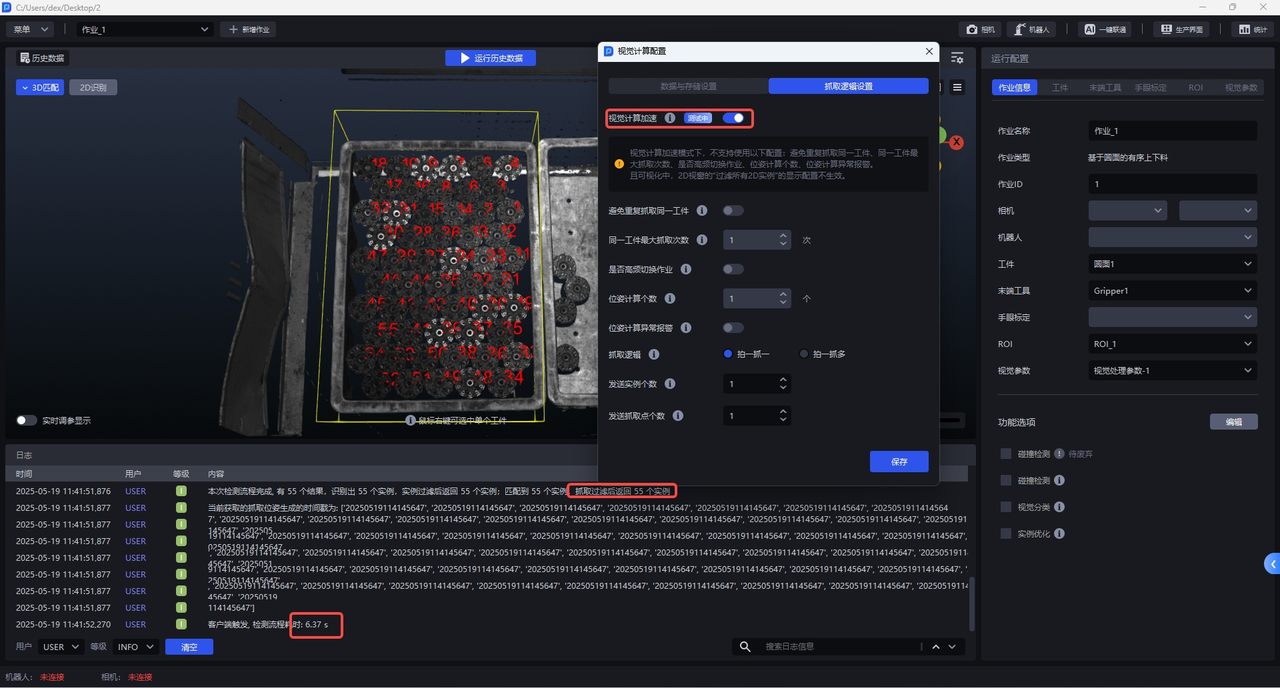
开启后,视觉计算的耗时较小,且默认识别所有视野内工件实例,适用于工件实例数量较多且节拍不满足要求的场景。如下图所示,未开启视觉计算加速时,检测出55个实例,耗时20.5 s;开启视觉计算加速后,同样检测出55个实例,耗时仅有6.37 s。
PickWiz 1.7.5 仅 拆垛、通用工件、通用圆面、通用圆柱 相关场景可使用该功能,且暂不支持功能选项场景(如识别类型/局部特征/正反),后续会逐步向其他场景以及功能选项场景集成。
注意:
开启 “视觉计算加速” 模式时,“避免重复抓取同一工件”、“同一工件最大抓取次数”、“是否高频切换作业”、“位姿计算个数”、“位姿计算异常报警”无法生效。
2.2 避免重复抓取同一工件
开启后,针对同一工件,若最大抓取次数内,无法抓取成功后,将不再尝试抓取该工件,而是跳过该工件去抓下一个工件。
注意:
若需开启“避免重复抓取同一工件”,应当同时开启 “同一工件最大抓取次数”,设置同一工件最多的尝试抓取次数。

常见于无序场景下,有些物料会被其他物料压住无法抓取,或者料框等物体限制其抓取,针对此类工件需要避免重复抓取,浪费耗时。
示例

注意:
开启 “视觉计算加速” 模式时,“避免重复抓取同一工件”开启后会无法生效。此时若需避免重复抓取,可使用抓取点过滤中的 “过滤与上一次视觉结果相近的抓取点” 函数替代(过滤与上一次视觉结果相近的抓取点:计算本次与上一次视觉结果的位姿变化量,判断是否为同一工件并进行过滤)。

2.3 同一工件最大抓取次数
表示同一工件最大的抓取次数,取值范围为1~5,和“避免重复抓取同一工件”同时使用,针对同一工件,若最大抓取次数内,无法抓取成功,PickWiz 将不再尝试抓取该工件,而是跳过该工件去抓下一个工件。
2.4 是否高频切换作业
实际生产场景需要频繁切换作业时开启,可以提升节拍。
2.5 位姿计算个数
设置视觉系统计算工件位姿的最大数量。
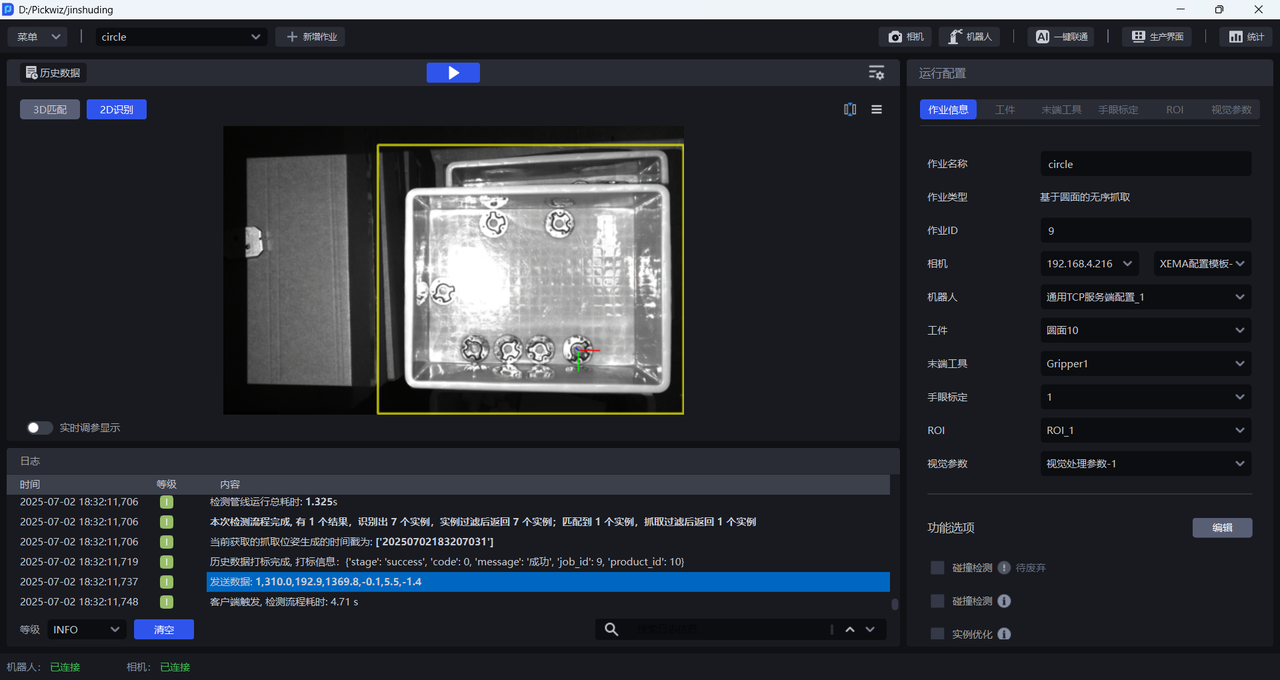
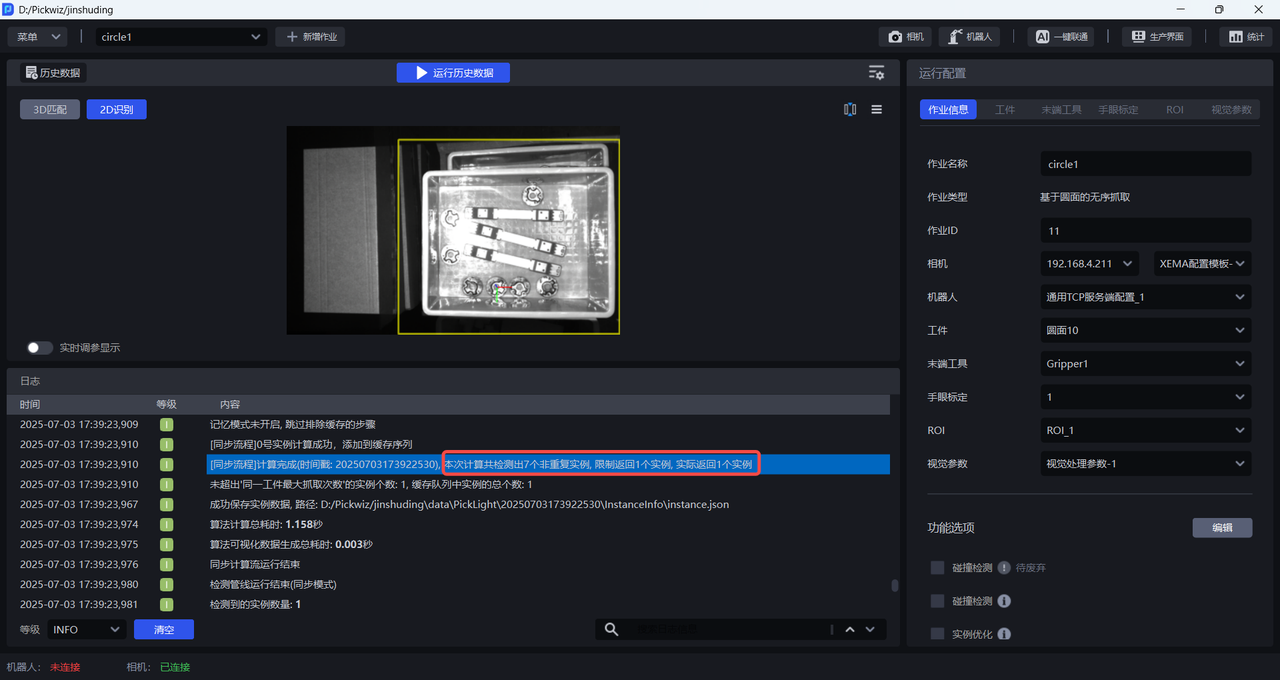
如下图所示,检测出7个实例,因为位姿计算个数设置为1,所以视觉系统只会计算1个实例的位姿并生成抓取点。
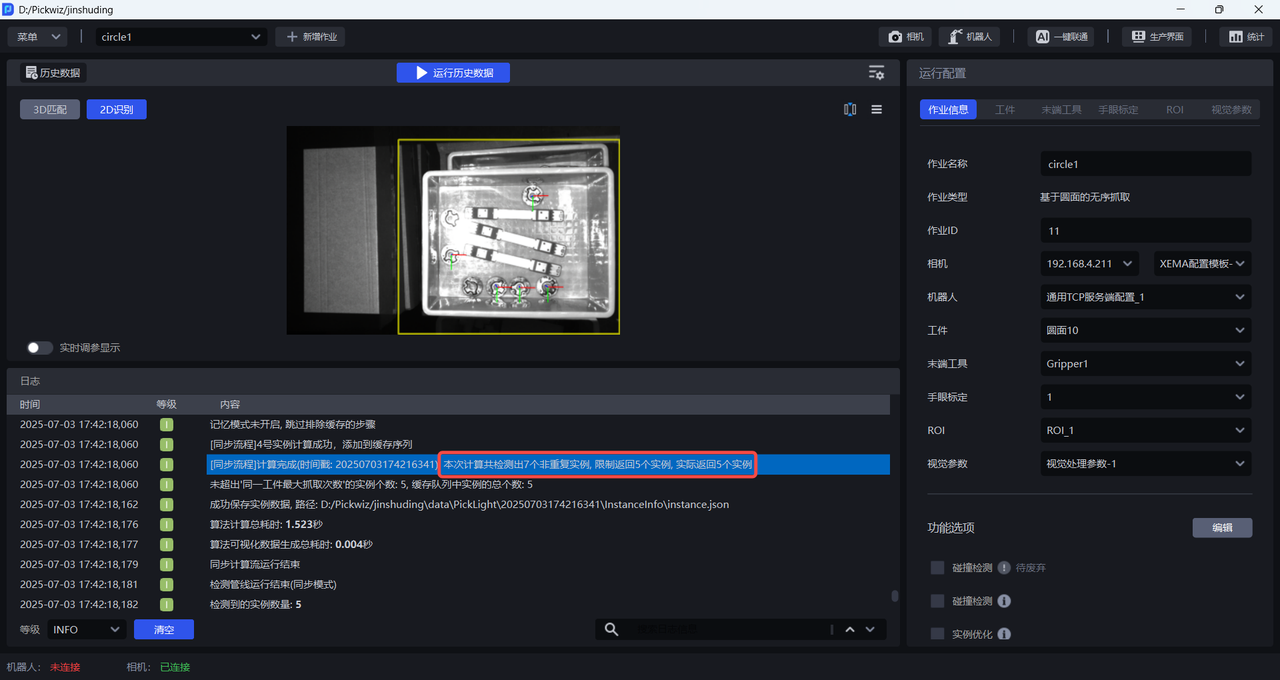
若将位姿计算个数设置为5,则视觉系统会计算5个工件的位姿并生成抓取点。
2.6 位姿计算异常报警
开启后,按实例排序的顺序依次计算工件姿态,若3D姿态估计计算失败则报警;
(默认为关闭)关闭时,3D计算失败则跳过当前工件,计算下一个工件位姿,不执行报警和视觉流程中断。
适用于有序场景中,按排序抓取时漏识别后跳抓物料需报警的情况。
2.7 抓取逻辑
2.7.1 拍一抓一
拍一抓一表示视觉拍照一次,计算一次,计算后将结果发送给机器人,丢弃多余的结果,机器人执行相关的抓取动作,然后重复。
如下图所示,不勾选拍一抓多时,机器人每一次触发检测流程,PickWiz都要重新进行拍照计算。
2.7.2 拍一抓多
拍一抓多表示视觉拍照一次,计算一次,计算后将结果发送给机器人,将多余的视觉结果保存,下一次机器人发送拍照计算指令时,若保存的视觉结果满足要求,则直接返回结果给机器人。
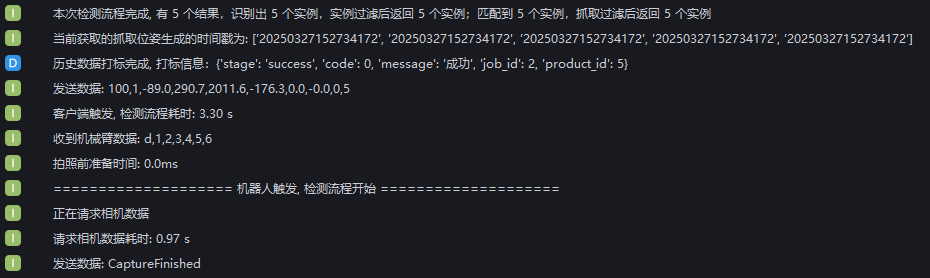
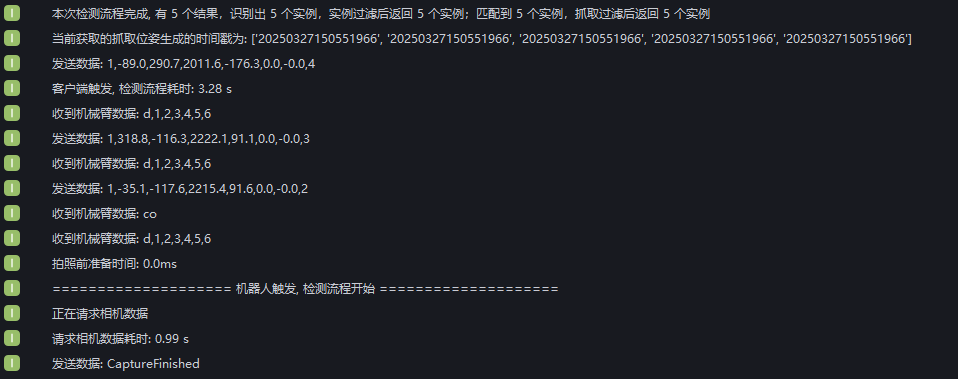
如下图所示,勾选拍一抓多时,PickWiz可以实现拍照计算一次抓取多次,如下图所示,检测出5个实例,第一次抓取由PickWiz触发,后4次抓取由机器人触发,后4次抓取时机器人向 PickWiz 发送位姿信息触发检测流程,PickWiz 不会重新进行拍照计算,而是直接返回抓取位姿。
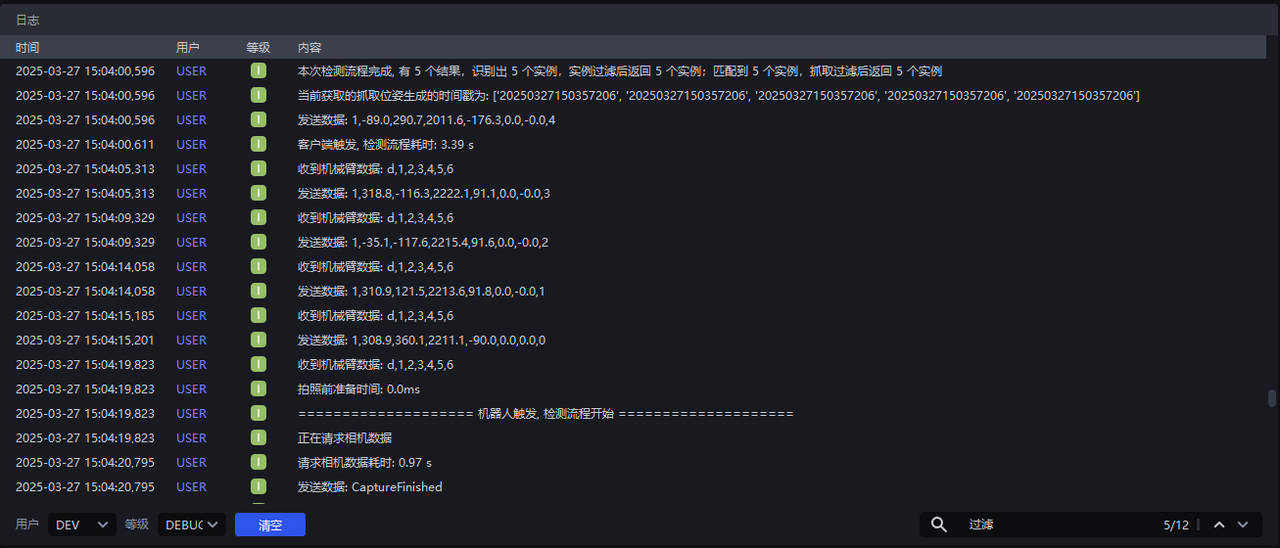
若抓取第3个实例后,机器人输入co指令清除 PickWiz 的缓存,第4个实例和第5个实例的视觉结果缓存被清除,当机器人触发第4次抓取时,PickWiz 又重新进行拍照计算。
2.8 发送实例个数
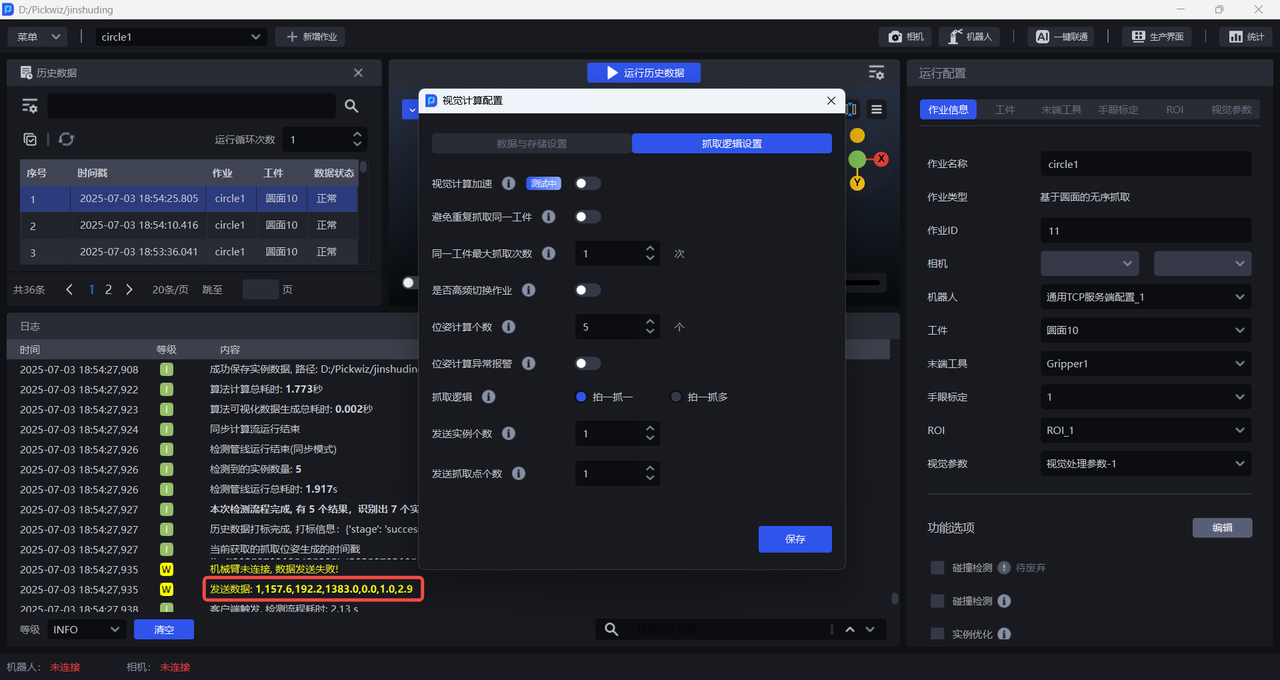
表示 PickWiz 每次发送多少个实例的视觉结果给机器人,取值≥-1,默认为1,-1表示 PickWiz 每次发送全部实例的视觉结果给机器人。
如下图所示,当发送实例个数设置为1时, PickWiz 每次发送1个实例的视觉结果给机器人。
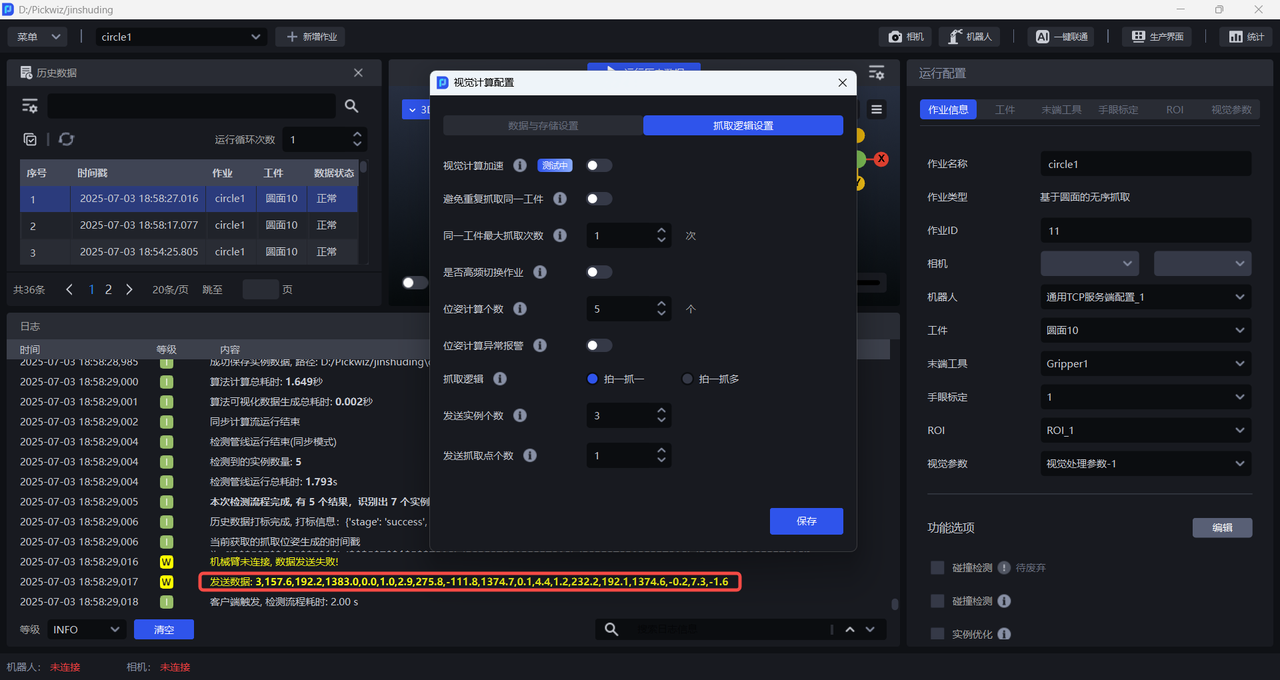
当发送实例个数设置为3时, PickWiz 每次发送3个实例的视觉结果给机器人,如下图所示。
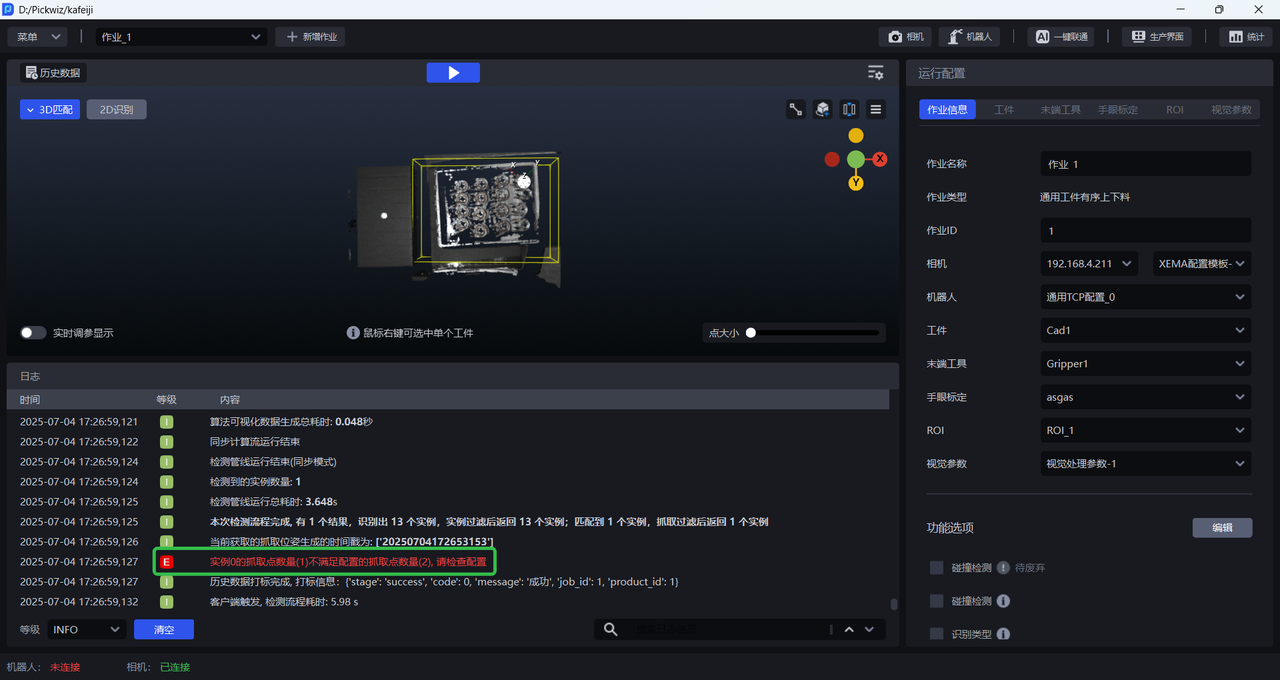
2.9 发送抓取点个数
表示 PickWiz 每次发送每个实例的多少个抓取点给机器人,取值≥0,默认为1。
如下图所示,在通用工件有序上下料场景中,每个实例只生成了1个抓取点,发送抓取点个数却设置为2,运行后会报错“实例的抓取点数量不满足配置的抓取点数量,请检查配置”。