
外观
点云模版制作的要素,原则及案例
思维导图
内容
工件点云模板制作说明
一、前置条件
| 前置条件 | 定义 | 注意事项 |
|---|---|---|
| 工件姿态变化 | 有限姿态(可数):仅能看到工件固定面(如正面),有效点云区为该面稳定可见的区域。 任意姿态:工件可能以任意角度出现,有效点云区为在80%以上姿态下均能稳定成像的区域(排除深孔、过曝区、凹槽等易缺失点云的部分)。 | 有序场景: 模板应仅依赖固定可视面的点云,避免因不可见面导致匹配失败。 无序场景: 需通过多视角扫描或CAD仿真确定稳定可见区域。 排除易缺失区域(如反光面、深凹结构),避免依赖不可靠点云。 确认方法: 采集不同姿态下的点云,统计各区域的可见频率,筛选有效点云区。 |
| 相机成像点云效果 | 通过3D相机(如结构光、双目视觉等)对目标工件进行识别后,所获取的点云数据的质量与完整性。 | 点云缺失 常见原因: 工件属性(高反光、透光材质导致激光无法返回)。 环境光干扰(强光照射导致传感器饱和)。 视角遮挡(工件自遮挡或外部物体遮挡)。 优化策略: 调整光源:使用漫射光或偏振滤光减少反光影响。 局部模板:使用可视区效果较好的点云做模板。 点云深度不连续、噪声大 常见原因: 工件属性(多层结构、透明/半透明材质)。 相机超出视差范围(测量距离过近/远导致点云失真)。 物体叠层遮挡(如堆叠工件导致点云混合)。 优化策略: 滤波去噪:使用滤波和剔除离群点功能优化点云质量。 深度校准:确保相机在最佳工作距离内采集数据。 分层分析:对叠层工件分区域提取点云,避免误匹配。 |
二、工件特性
| 属性 (越高优先级越高) | 定义 | 注意事项 |
|---|---|---|
| 尺寸 | 工件的物理尺寸(体积、面积)影响点云采集密度和模板计算复杂度。 |
|
| 自遮挡 | 工件自身结构导致部分区域在特定视角下无法成点云(如多层嵌套,叠层工件、复杂曲面等)。 |
|
| 立体性 | 工件在三维空间中的深度变化程度(如高度差、阶梯结构、曲面起伏等)。 |
|
| 对称型 | 工件具有对称结构(如左右对称、旋转对称)。 |
|
| 内凹状 | 工件表面存在凹陷结构(如内孔、凹槽),可能导致点云缺失或成像不稳定。 |
|
| 凸包状 | 工件表面存在凹陷结构(如内孔、凹槽),可能导致点云缺失或成像不稳定。 |
|
| 平面型 | 工件表面近似平面,内部缺乏显著特征。 |
|
| 动态更新情况 | / |
|
三、基本原则
| 在工业机器人 3D 视觉中使用建模进行匹配时,选取特征需要遵循以下几个原则 | |
|---|---|
| 特性 | 说明 |
| 显著性 | 选择那些在物体表面比较突出和易于识别的特征,如边缘、角点、纹理,凹凸面等。这些特征应该具有较强的可辨识度,便于在场景中快速检测和匹配。 |
| 稳定性 | 特征应该对光照、视角等变化具有一定的稳定性。 即使物体发生旋转、缩放等变形,这些特征也能保持相对不变 |
| 唯一性 | 特征应该具有足够的独特性,不易与其他物体或环境中的特征混淆。 这有利于提高匹配的精度和可靠性。 |
| 密集性 | 在物体表面分布尽可能密集的特征点,增加匹配的冗余性。这样即使部分特征点被遮挡或丢失,也能依靠其他特征点完成匹配。 |
| 可重复性 | 选择那些在不同视角、光照条件下都能稳定检测到的特征。这样可以确保特征在各种场景中都能被准确识别。 |
| 计算效率 | 特征的提取和描述过程应该尽可能高效,满足工业机器人实时响应的需求。可以选择一些计算量相对较小的特征。 |
四、针对性场景注意事项
不同工业场景、不同技术路径背景下,点云模板制作的一般注意事项如下
| 场景 | 场景图 | 点云图
| 模板
| 点云模板注意实项前置条件 x 工件特性 - 基本原则 - 对象选取 - 具体形式 | 注意事项应对方案 |
|---|---|---|---|---|---|
| 通用有序 |  |   |  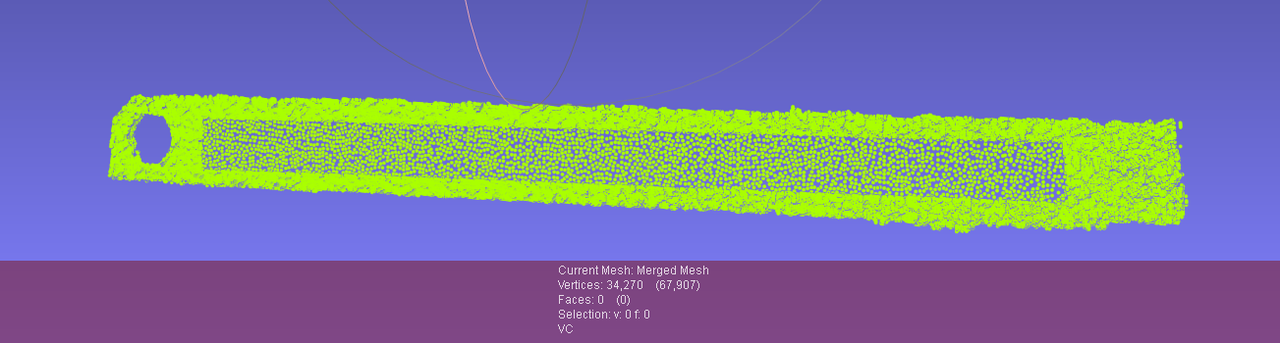 | 前置条件:工件特性:大件长条(可能形变)、平面形工件基本原则: | 前置条件:工件特性: |
| 通用无序 | 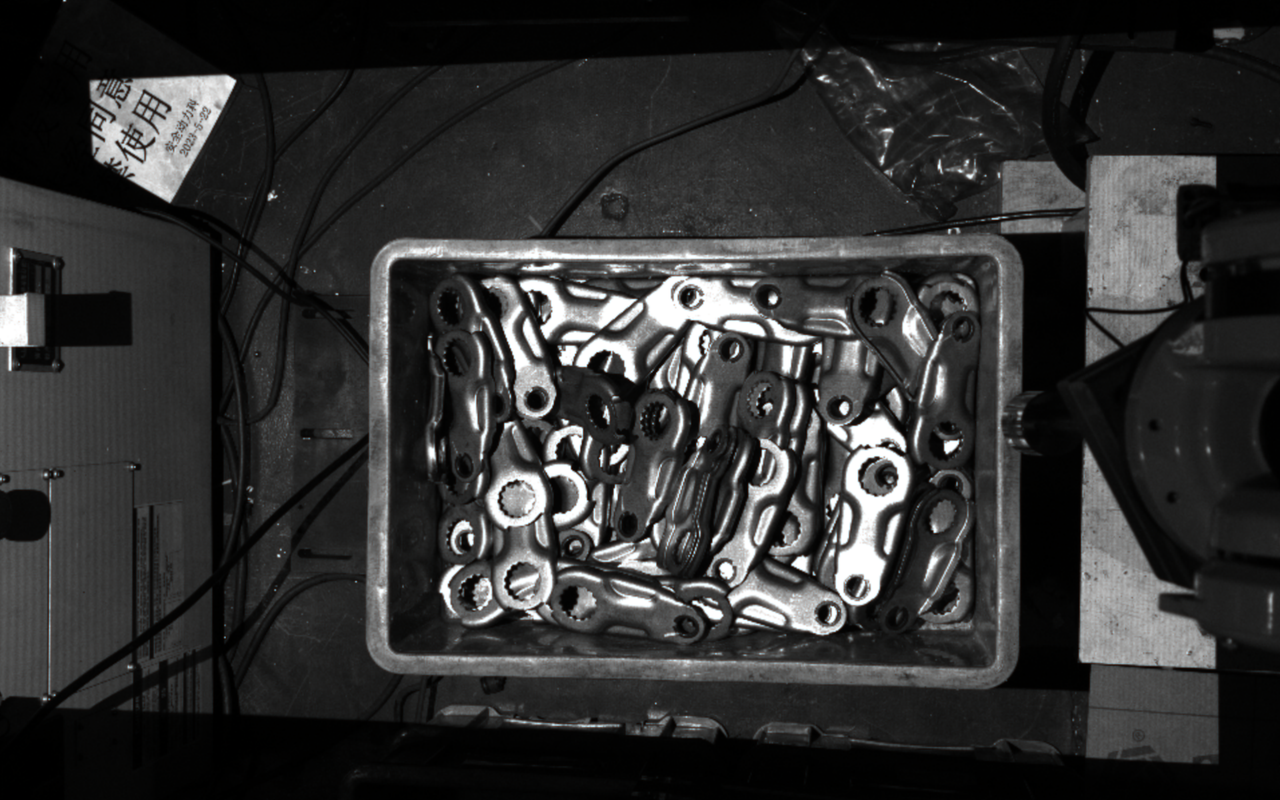  | 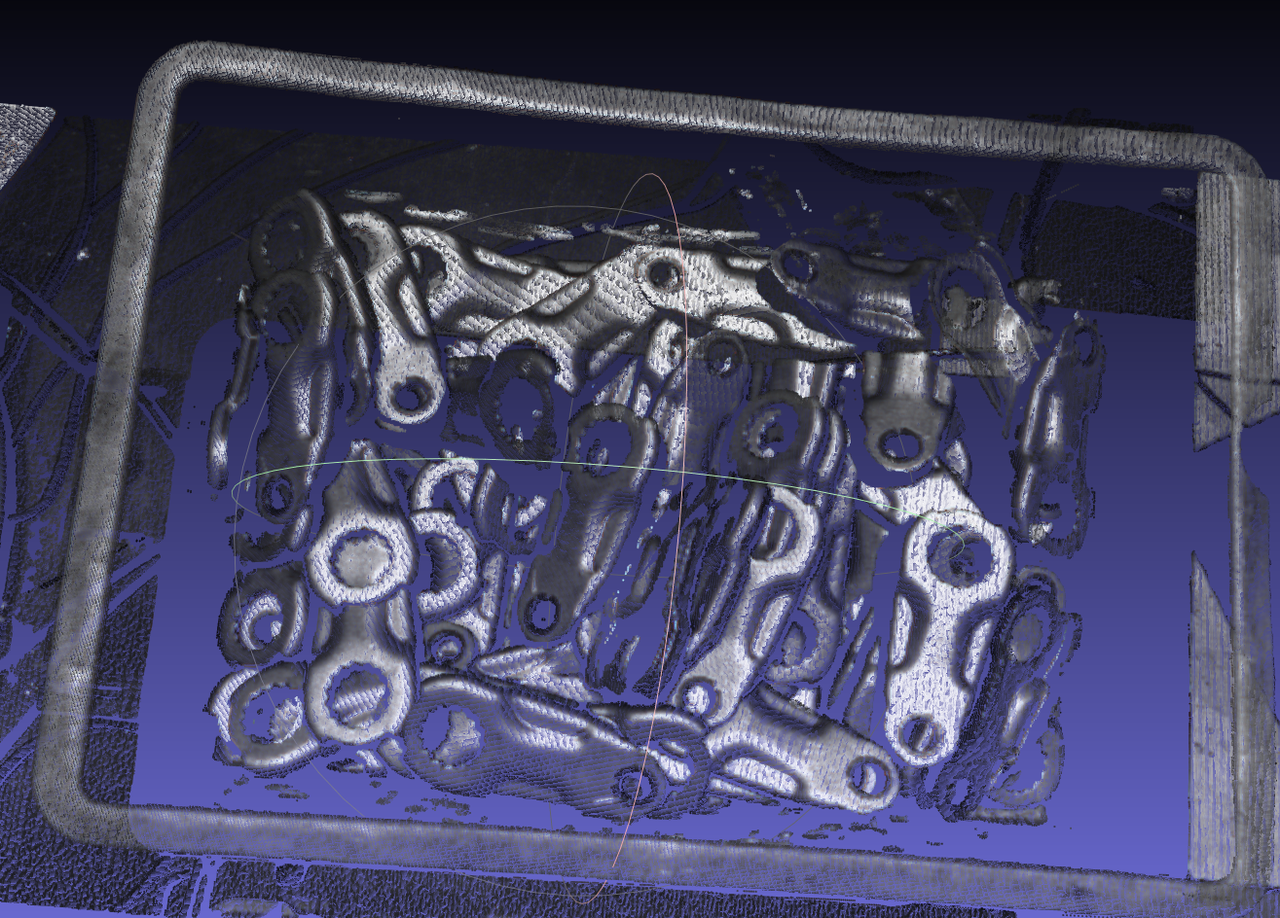 | 直取图 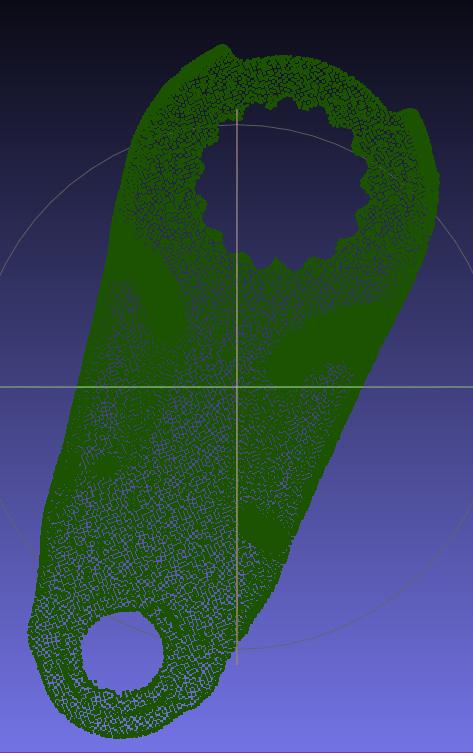 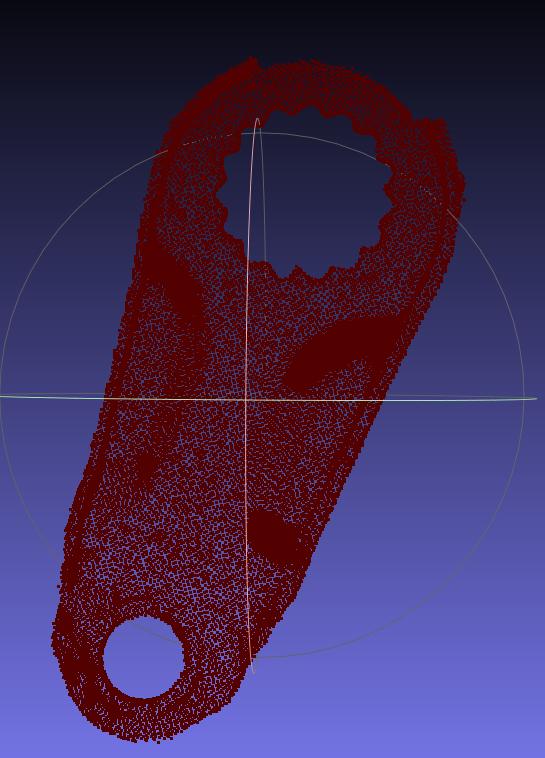 | 前置条件:工件特性:自遮挡、内凹状(有圆孔)基本原则: | 前置条件:工件特性: |
| 面型有序 | 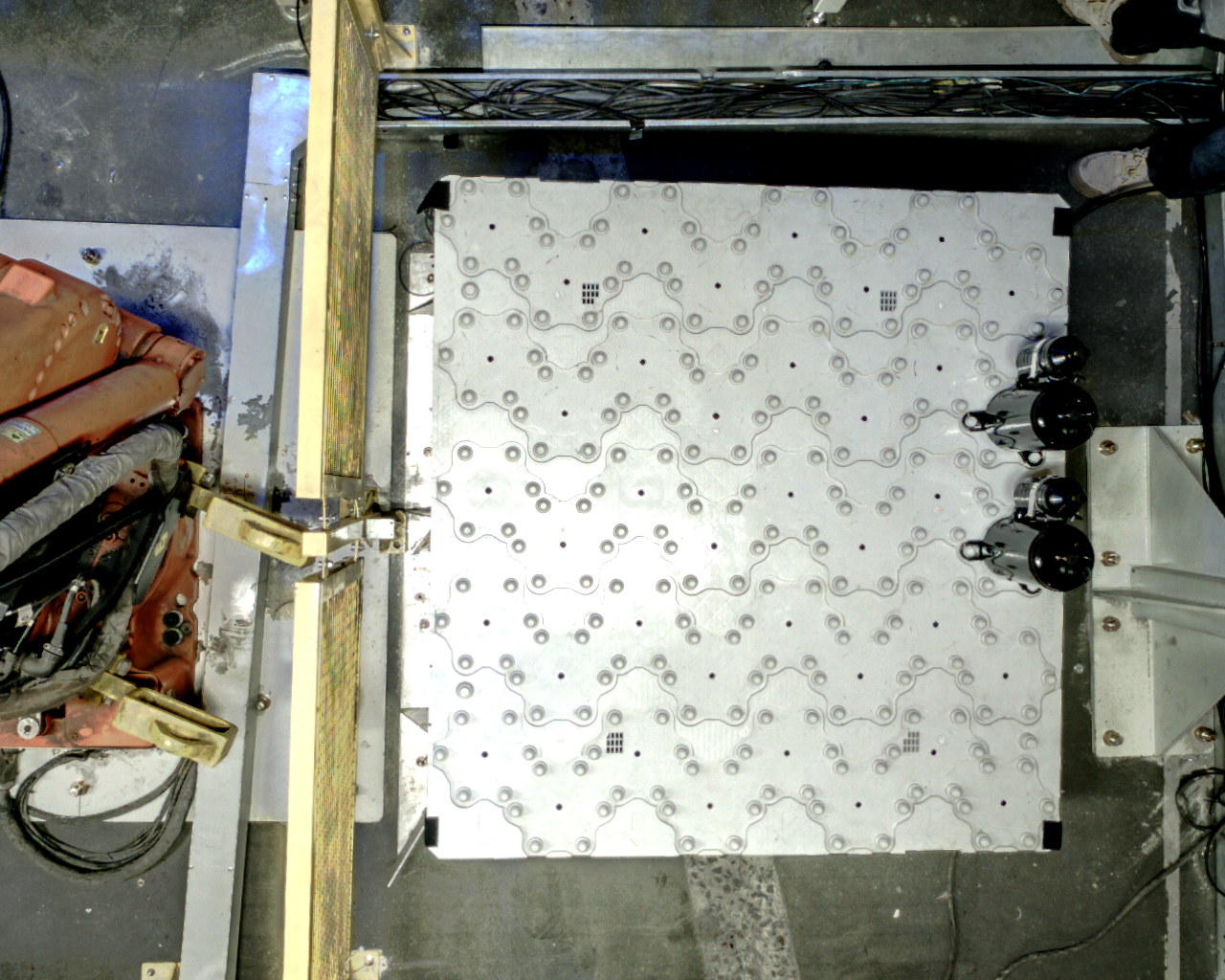  | 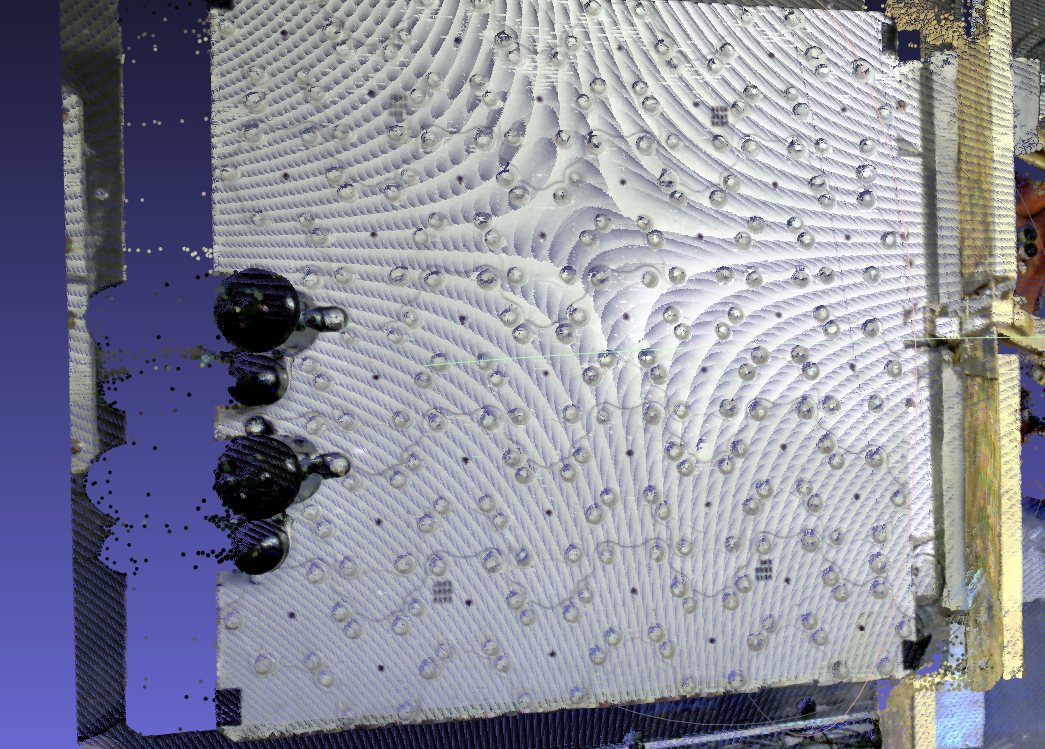 | 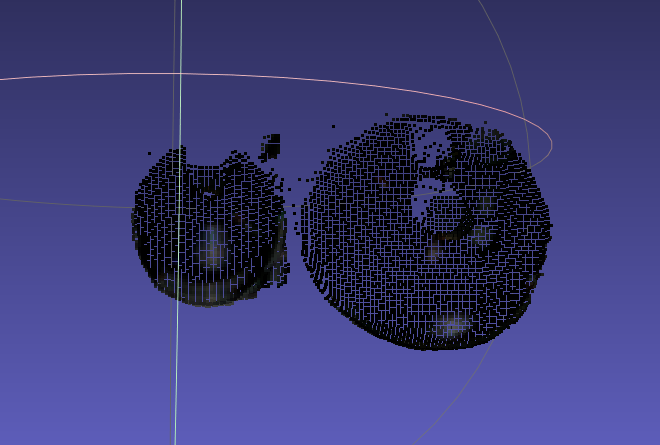 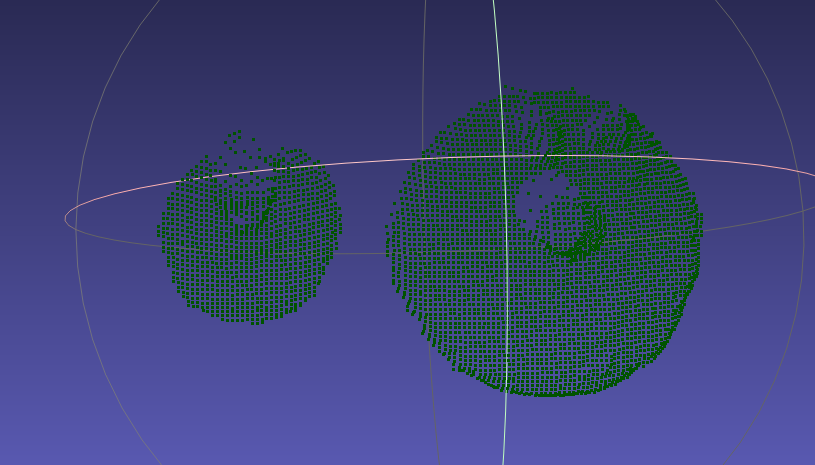 | 前置条件:工件特性:立体性(有高度差、曲面起伏)基本原则: | 前置条件:工件特性: |
| 面型有序 | 工艺误差导致小罐空间位置会上下波动 | | 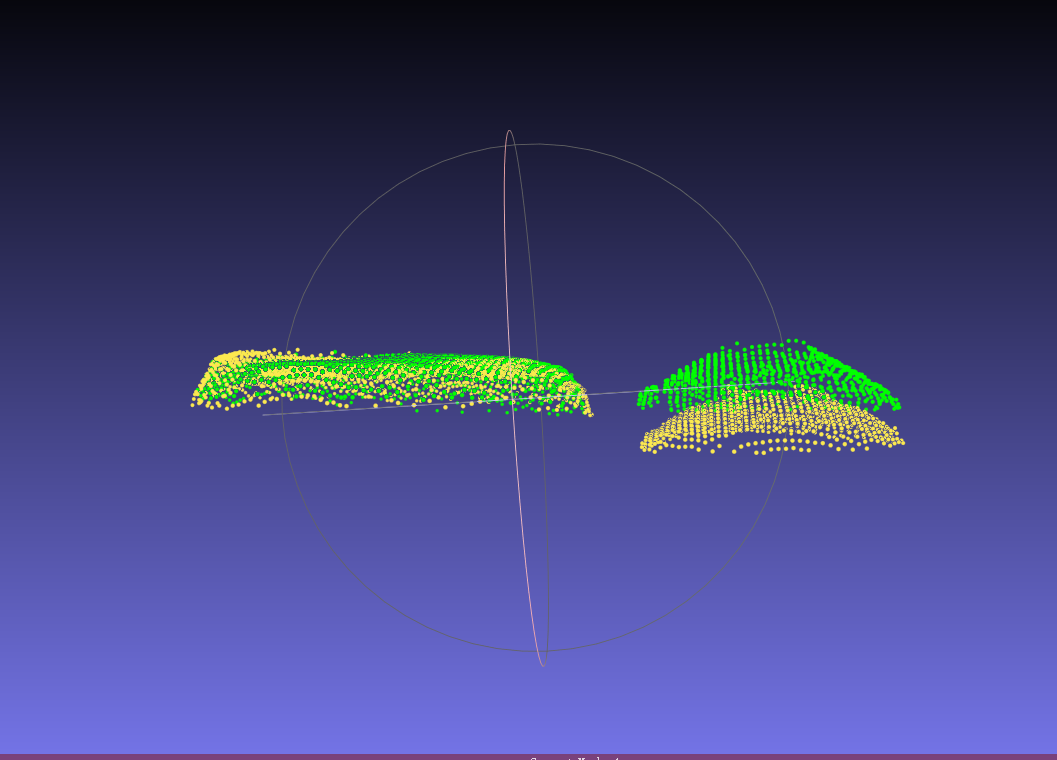 | 前置条件:工件特性:立体性(有高度差、曲面起伏)基本原则: | 前置条件:工件特性: |
| 面型无序 |  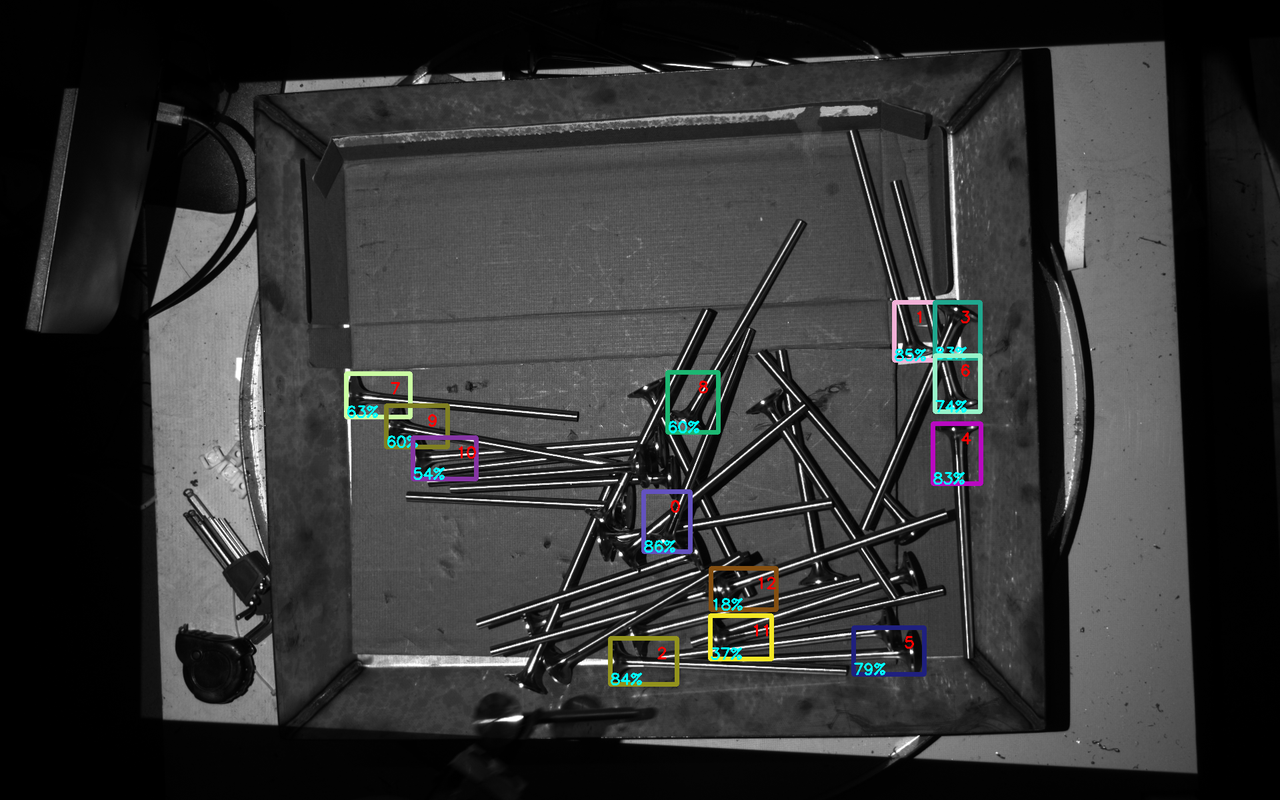 | 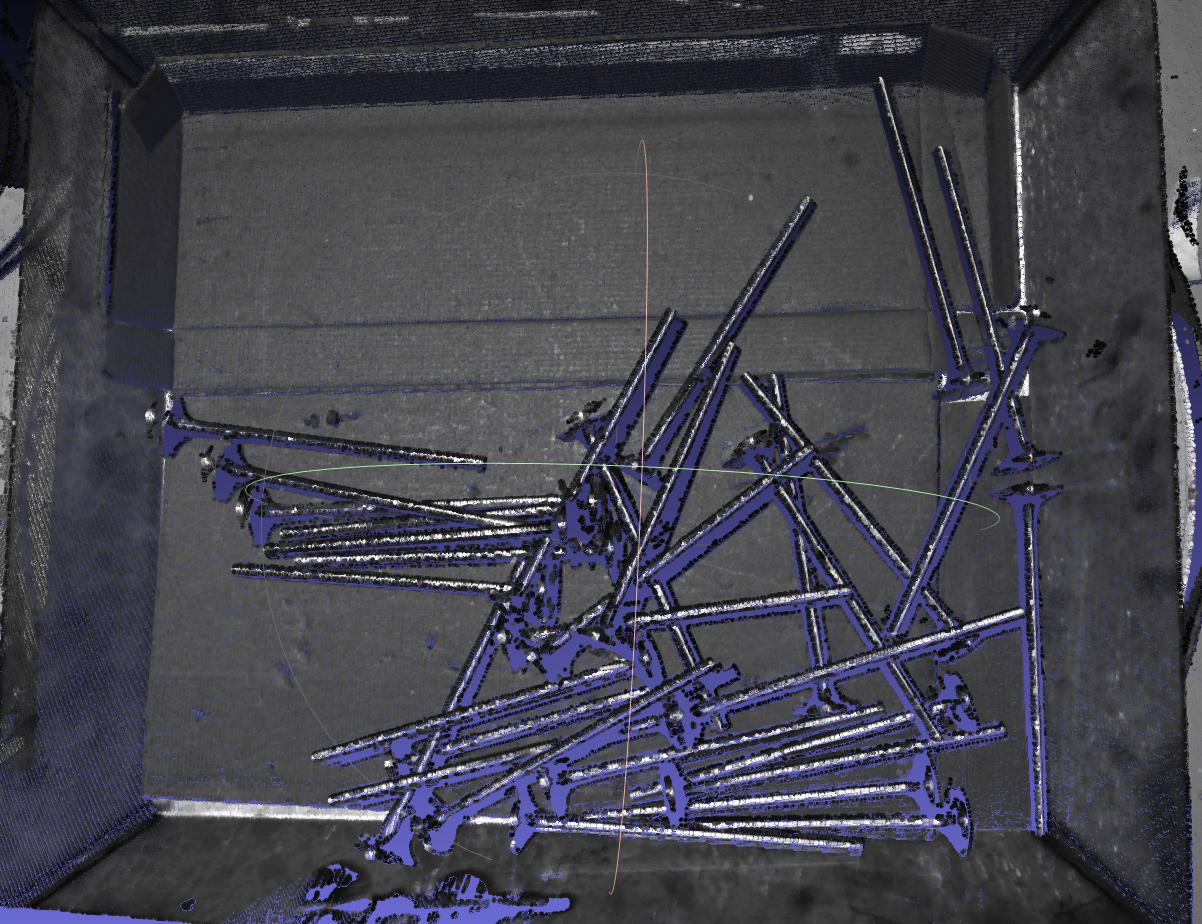 |    | 前置条件:工件特性:对称型(旋转对称)、自遮挡基本原则: | 前置条件:工件特性: |
| 通用无序 |  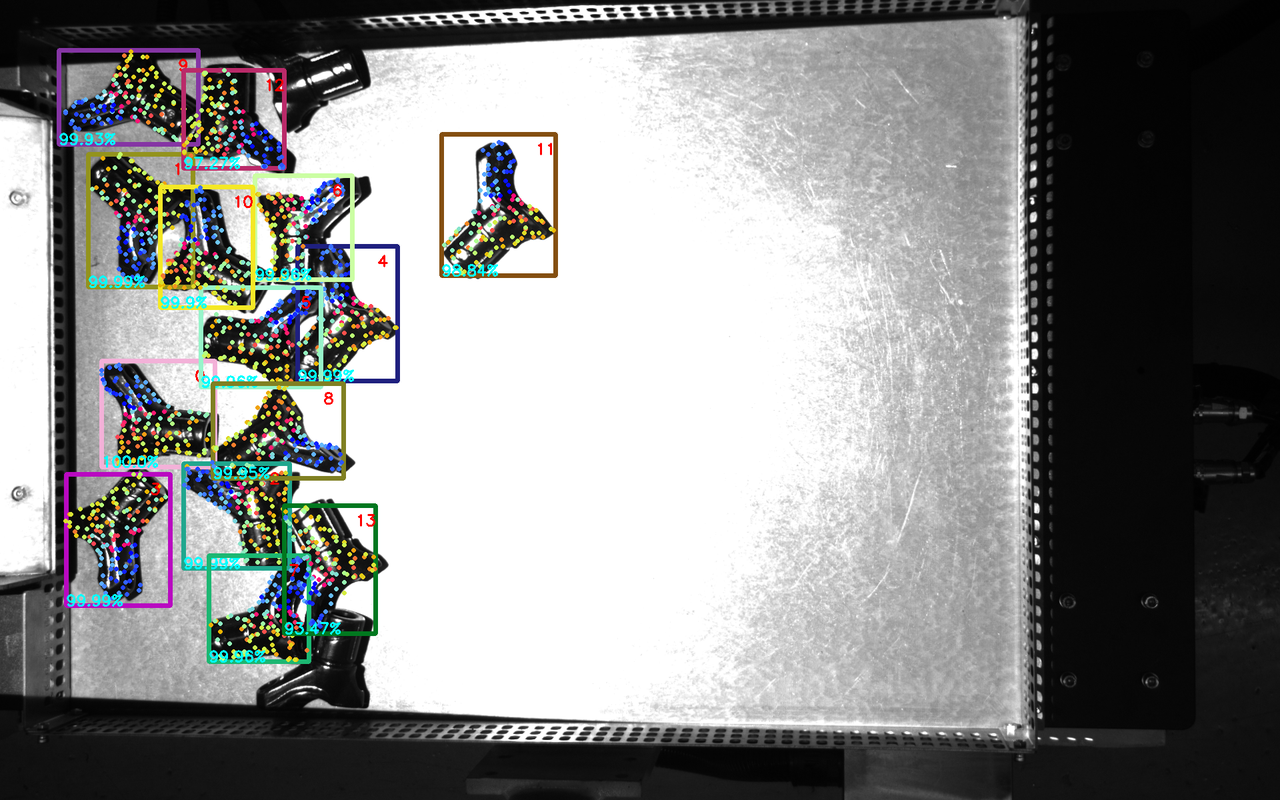 | 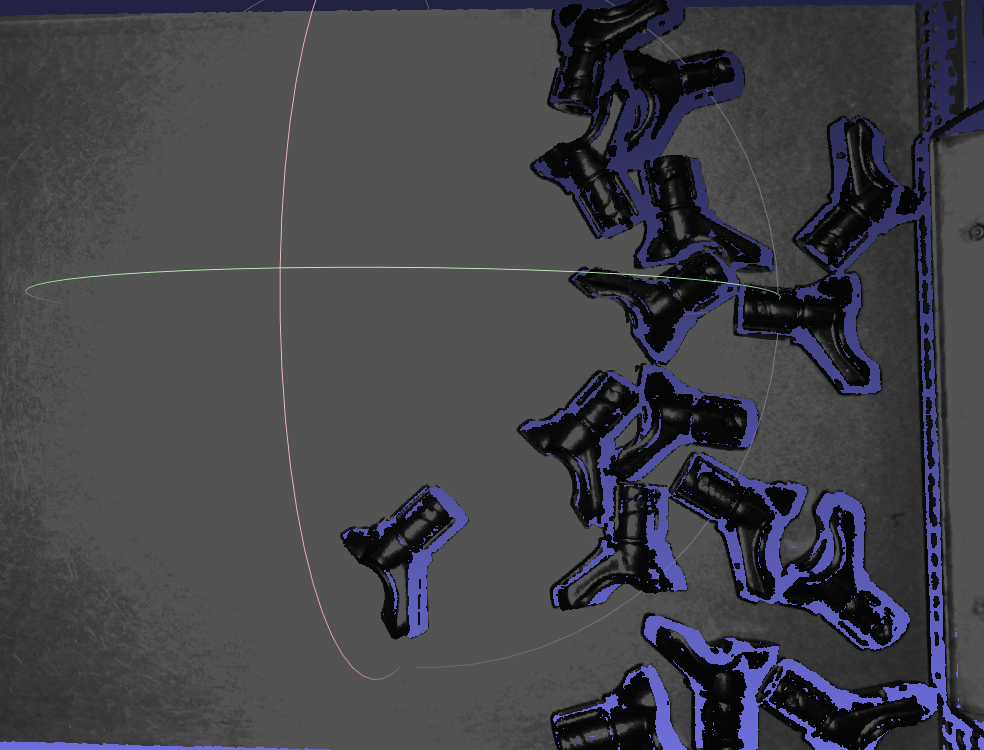 | 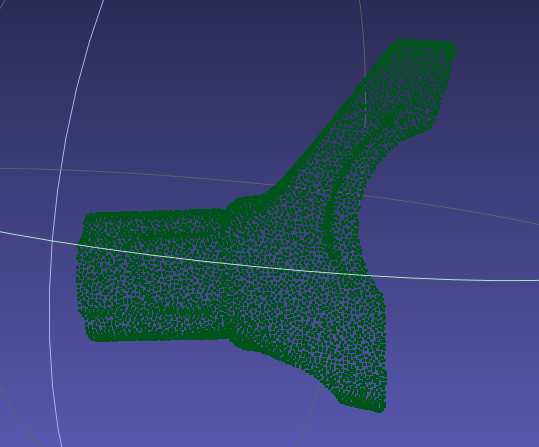 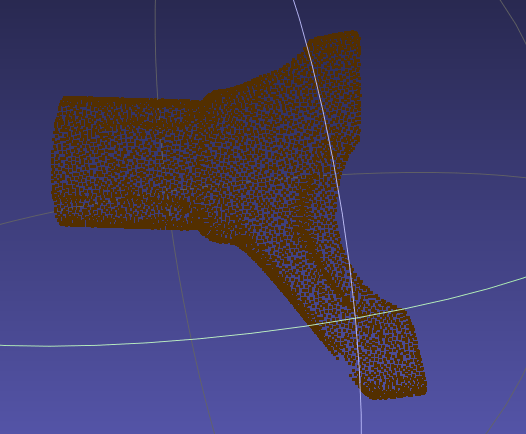 | 前置条件: 根据场景摆放和工件特性,应使 用正反模板,分别制作工件的正 面点云和反面点云,关键点取工件 整体的关键点工件特征: 工件凸包型,:凸曲面易导致反 光,点云成像质量不稳定基本原则: | 前置条件: 使用pickwiz软件分别生成正反点 云模板(当前视角),且生成工 件整体的关键点工件特性: 使用场景点云双模板,模板要与 CAD的正反面贴合 |
| 面型定位装配(仅匹配) | 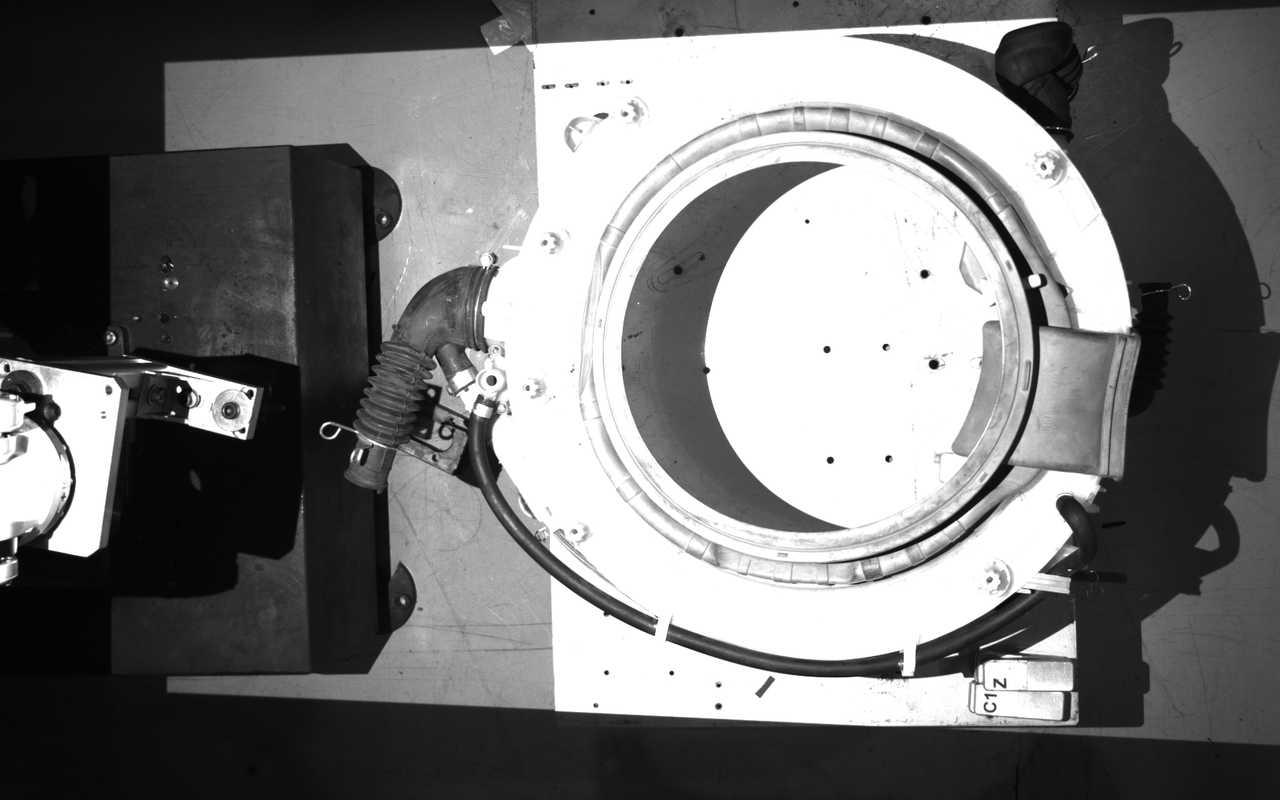 |  | 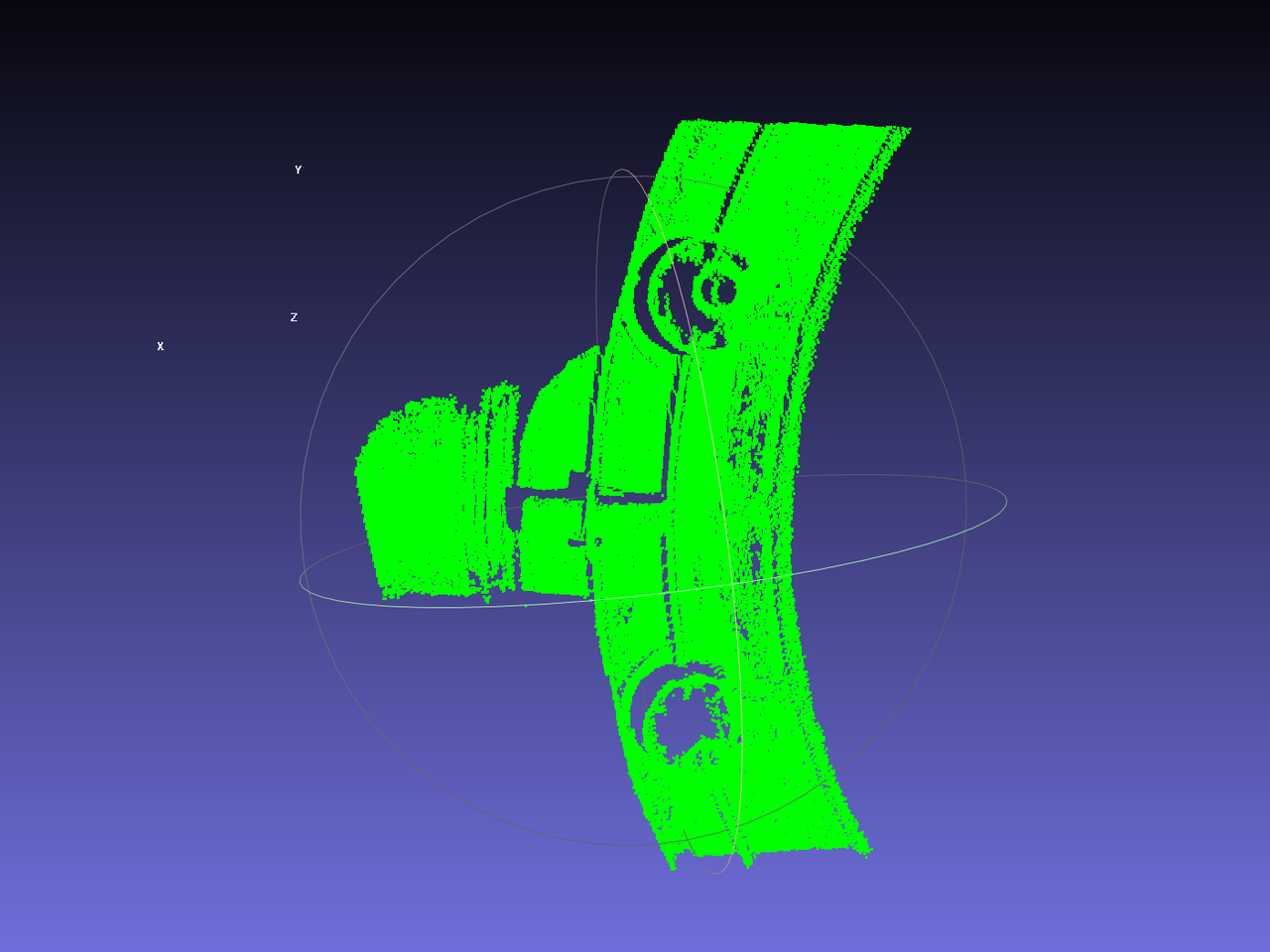 | 前置条件:工件特性:基本原则: | 前置条件:工件特性: |
| 通用定位装配 |   | 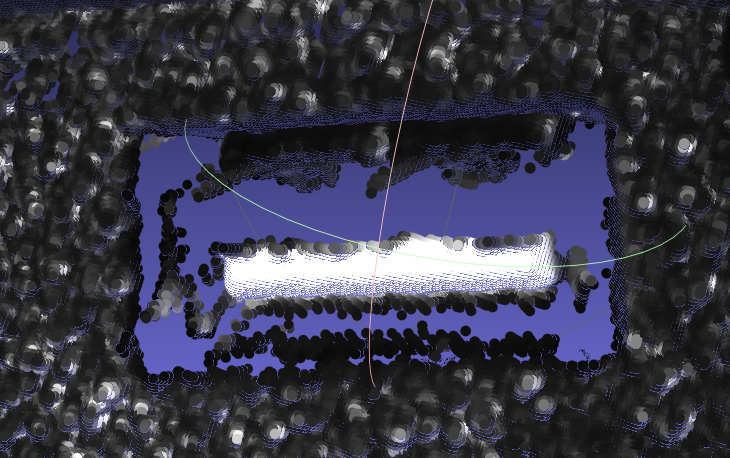 | 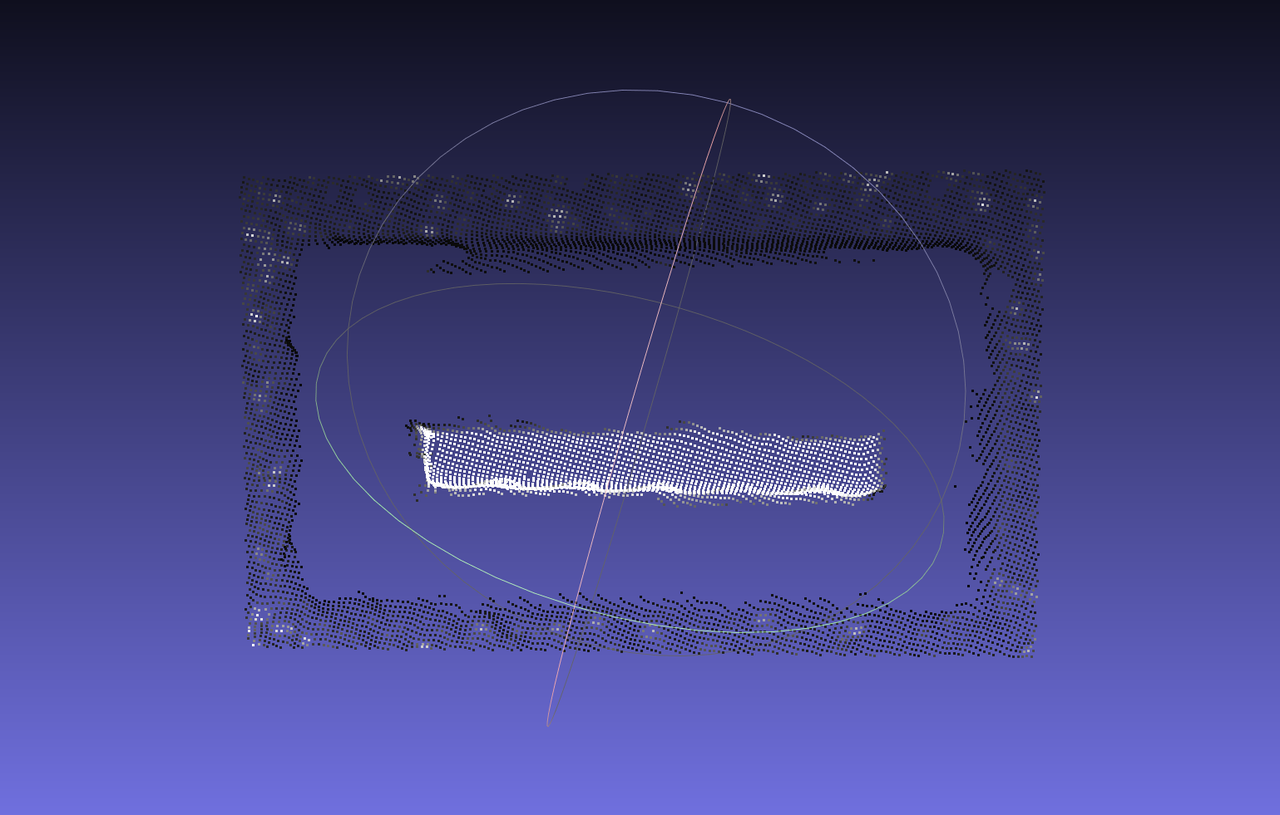 | 前置条件:工件特性:基本原则: | 前置条件:工件特性: |