
外观
随机姿态自动采样
PickWiz 1.7.3+ 版本支持“随机姿态自动采样”;暂时不支持三四轴机器人进行该标定方式。
1. 标定前准备
在手眼标定前,需做好以下准备工作:
(1)完成 3D视觉引导套件硬件搭建
请参照 3D视觉引导套件硬件搭建 完成机器人、相机和工控机的安装与连接
(2)完成 新建项目和新建作业
(3)完成相机连接和调参并配置到作业信息
请参照 相机连接与调参指南 连接相机、调整相机成像质量、校验相机精度,并配置到作业信息
(4)完成机器人通信配置
请参照 机器人配置与通信操作指南 建立机器人与 Pickwiz 的通信,自动标定需要分别配置两个通讯字段
机器人发送视觉检测指令:需添加
拍照计算类型(${co}),并置为3,代表进行自动标定的请求
机器人姿态(${p}),代表机器人采样位姿
自动标定采样发送指令:需添加
标定采样结果(${sr}): 代表采样结果
下次采样位姿(${cp}):下一次机器人采集标定样本的移动位置
(5)准备标定所需物料
- 需要使用的标定板,请确保标定板平整、清晰,无明显刮花污垢,无折弯变形;
2. 标定信息配置
进入手眼标定界面,点击添加手眼标定,进入标定信息配置界面
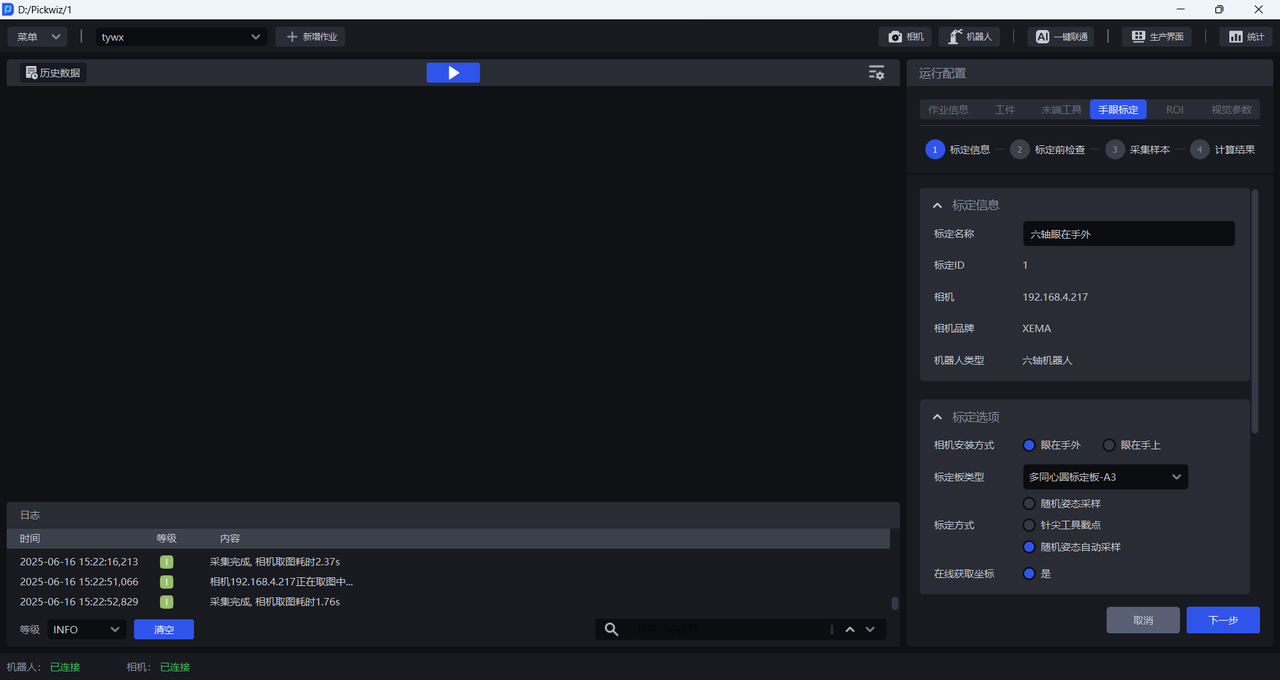
标定名称可自行命名当前的标定配置标定ID用于机器人切换标定配置相机为当前连接的相机的IP地址相机品牌为当前连接的相机的品牌机器人类型与机器人配置中的机器人类型保持一致相机安装方式选择眼在手外标定板类型选择当前的标定板类型
合适的标定板主要由机器人类型和相机高度决定,请根据实际场景需求,参照下表选择合适的标定板。
| 机器人类型 | 相机安装高度 | 选择标定板 |
|---|---|---|
| 六轴机器人 | 0.5米以下 | A6多同心圆标定板 |
| 1.5米以下 | A5多同心圆标定板 | |
| 1.5米 -- 2.5米 | A4多同心圆标定板 | |
| 2.5米以上 | A3多同心圆标定板 | |
| 三轴/四轴机器人 | 0.5米以下 | A6多同心圆标定板 |
| 1.5米以下 | A5多同心圆标定板 | |
| 1.5米 -- 2.5米 | A4多同心圆标定板 | |
| 2.5米以上 | A3多同心圆标定板 |
标定方式选择随机姿态采样标定在线获取坐标选择是自动标定采样分布
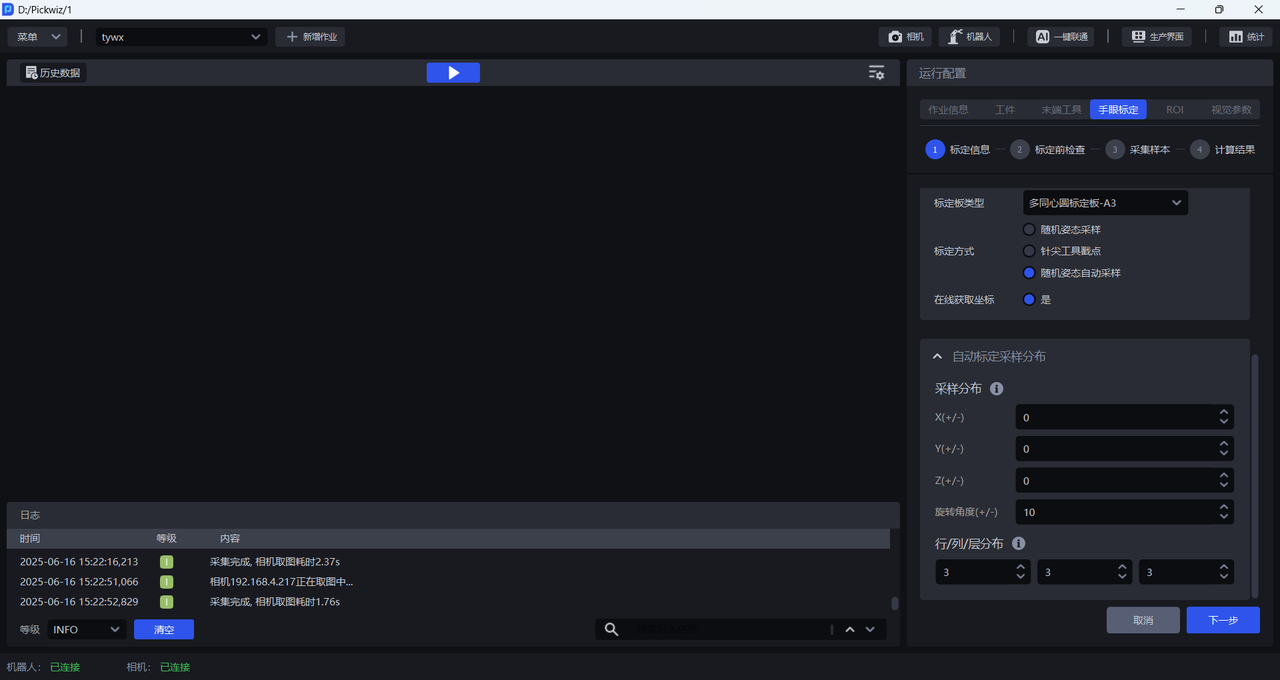
采样分布:该配置以当前位置为原点(基于机器人坐标系),用户可设置机器人在 X/Y/Z 正负轴上的可移动采样范围,以及固定在 初始位置 进行旋转采样的角度。需确保采样范围处于相机拍照视野内,并保证不碰撞且有适当空间余量。单位为 (mm) 和 (°)。
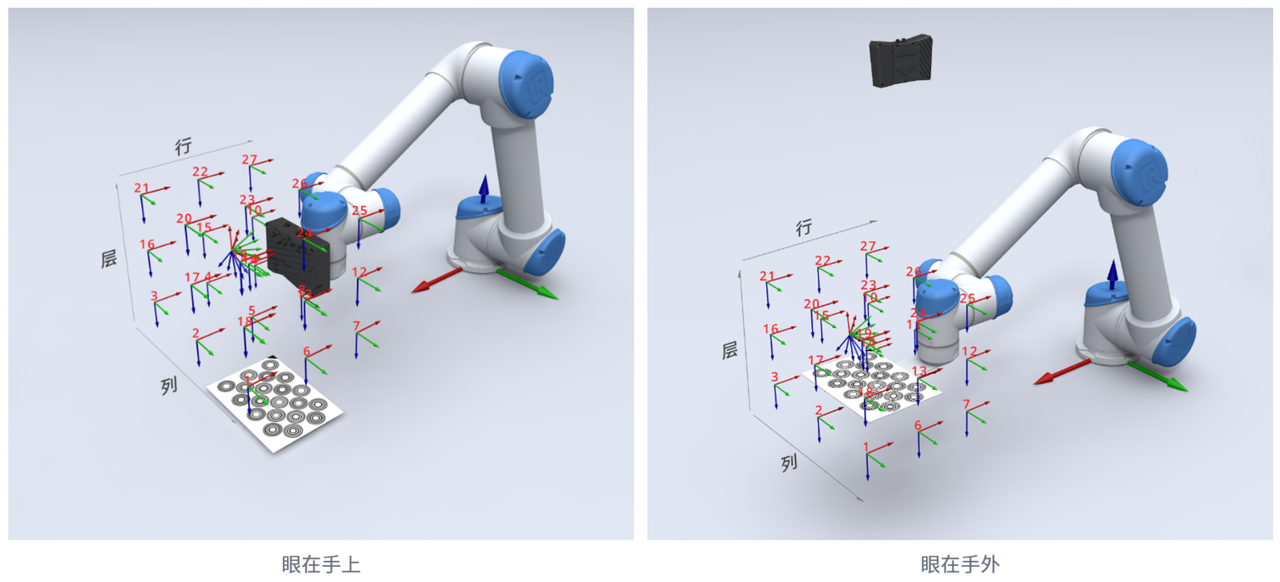
行/列/层分布:
可设置样本采集点在机器人可移动采样范围内的行/列/层分布数量。
默认使用3x3x3的行列层分布,若精度允许可设置成为2x2x3等行列层分布数更小的组合,建议任一分布数量为2~3个。单位为 (个)
3. 标定前检查
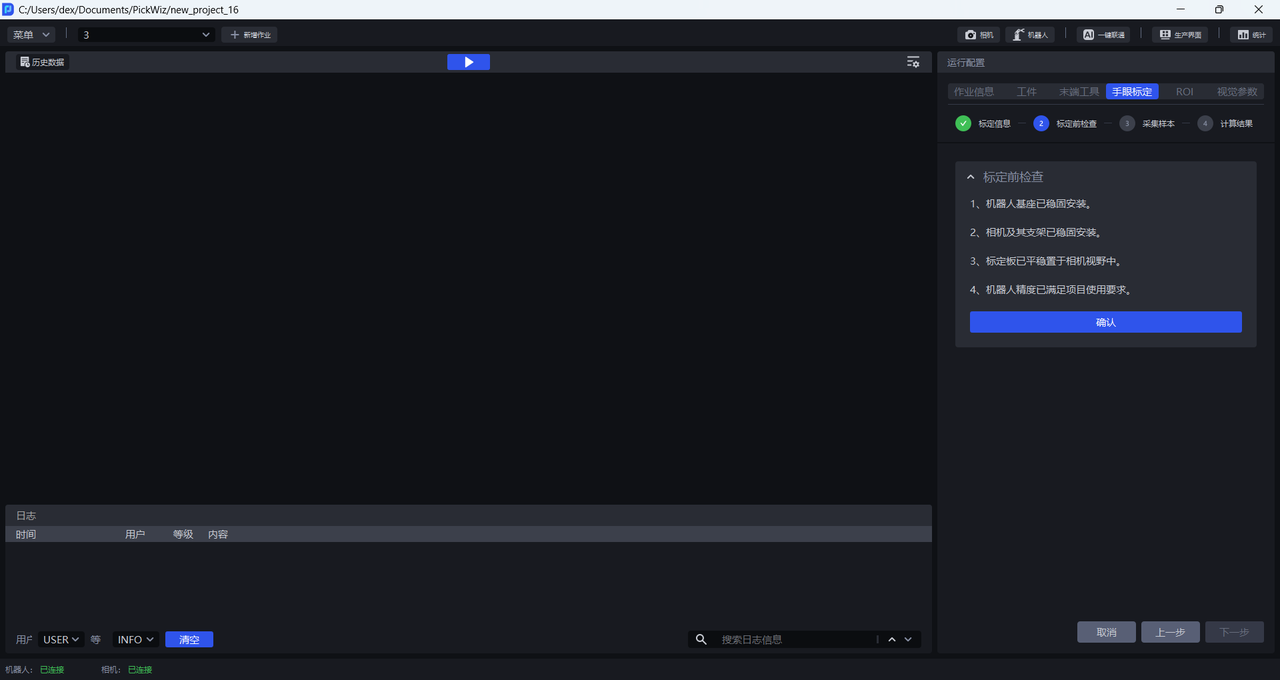
- 确保机器人基座已稳固安装
在进行手眼标定前,应仔细检查机器人基座的安装情况,若机器人基座未牢固安装,机器人运动时会发生明显的晃动,影响机器人精度,从而影响标定结果。
按如下步骤检查机器人基座的安装是否满足要求:
其一,安装机器人基座的平面必须平整,保持清洁;
其二,操控机器人以 100% 的速度大幅度地平移或旋转,观察机器人是否存在晃动的迹象,如有晃动请重新调整固定机器人基座,保证机器人运动时不发生位移、倾斜等问题;
其三,检查机器人本体和基座之间是否紧密连接,拧紧螺丝防止松动。
- 确保相机及其支架已稳固安装
在进行手眼标定前,应仔细检查相机及其支架的安装情况,若相机及其支架未牢固安装,会影响相机成像质量,从而影响标定结果。
按如下步骤检查相机及其支架的安装是否满足要求:
其一,检查相机支架是否为机加工件,支架的材质应避免铝型材;
其二,摇晃支架,观察支架是否存在明显晃动,如有晃动请重新调整固定支架;
其三,摇晃相机,观察相机是否存在明显晃动,确保相机稳固安装。
- 确保标定板已平稳置于相机视野中
相机安装方式为眼在手外,需将标定板安装在末端工具上,保证标定板位于相机视野中。
- 确保机器人精度已满足项目使用要求
若机器人精度不满足项目使用要求,应参照标定校验校正机器人精度。
4. 采集样本
4.1 采集多组标定板及机器人坐标
本流程通过机器人触发完成闭环的标定流程,机器人端需重点关注初始位姿校准和实时状态反馈,确保采样数据的空间分布均匀性和系统鲁棒性。
4.1.1 机器人配置使用参数定义
机器人视觉检测发送指令
p:机器人当前位姿坐标
co:拍照计算类型(固定值3表示自动标定采样)
PickWiz自动标定采样发送指令
sr:采样结果状态码(决定流程走向)
cp:下一个采样点的坐标指令(默认值表示终止)
4.1.2 操作流程
初始化配置
进入机器人配置界面,完成单次设置:
视觉检测发送指令与自动标定采样发送指令启用当前机器人配置方案
启动准备
选择标定配置,进入采样页面
机器人移至初始位姿
初始位姿校准:必须保证标定板位于相机视野中央区域,确保样本的均匀分布
自动采样阶段
通过机器人通信程序触发首次检测:
不同品牌需要不同的标准通信程序,入场前需要确定程序是否有提供。
机器人发送含
p=初始位姿、co=3的视觉检测指令PickWiz自动生成采样分布,记录第一次采样,返回
sr状态码和新的cp坐标
循环执行以下操作:
机器人根据返回的
sr状态码和cp坐标移动至新位姿机器人向PickWiz发送发送含
p=当前位姿、co=3的视觉检测指令PickWiz进行采样并向机器人返回
sr状态码和新的cp坐标当机器人判断
cp为默认值(空值)时自动结束采样
不同标定采样结果对应不同信号值,具体如下:
0:自动采样成功结束
1: 新增样本成功
11:新增样本失败,此时可暂停并检查
检测结果中不通过项12:自动采样结束,但达到最小样本数量,由于中途有新增样本失败导致新增样本次数不够,需要检查机器人初始位姿是否在视野中,或重新设置自动采样分布参数
13:生成采样姿态失败,确认机器人配置以及样本分布配置是否正确
14:启动标定异常:未进入自动标定采样页面
15:系统错误:联系技术支持
4.1.3 检测结果分析
检测分为4个方面:
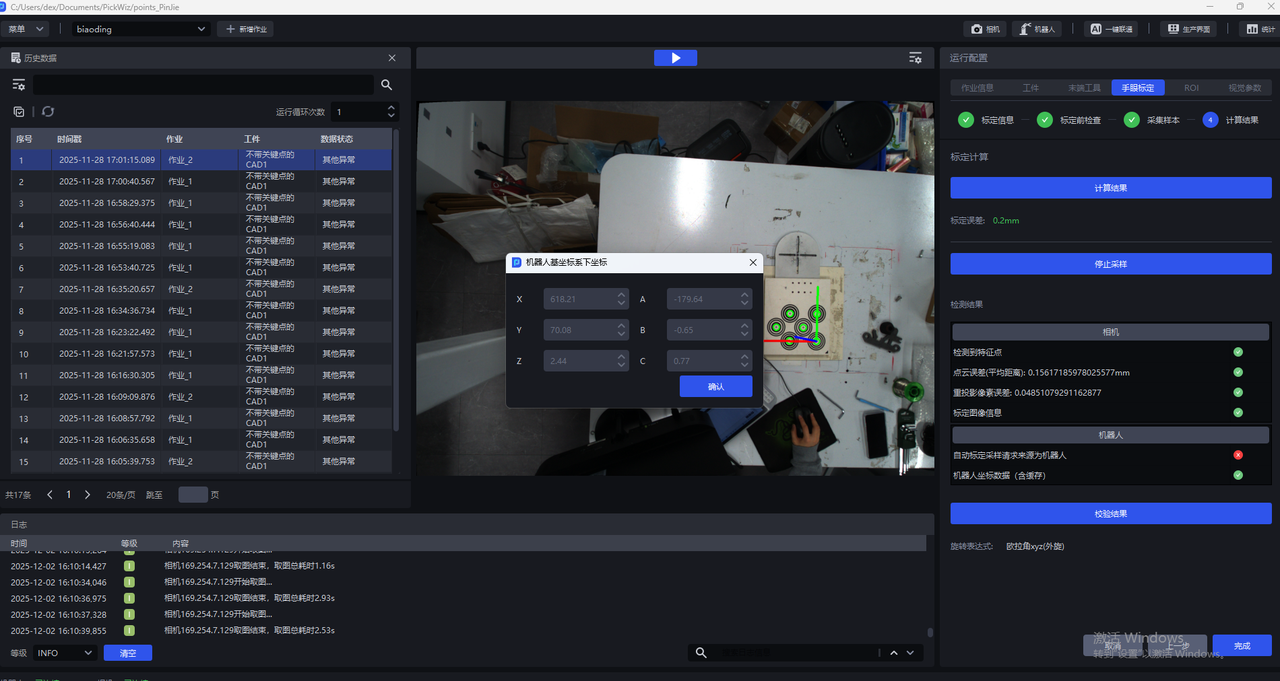
标定图像信息:手眼标定图像
机器人检测:
4.2 计算标定结果
点击 计算结果 ,Pickwiz会根据已采集样本计算标定结果,若标定误差不满足要求,请进行标定结果检查与分析。
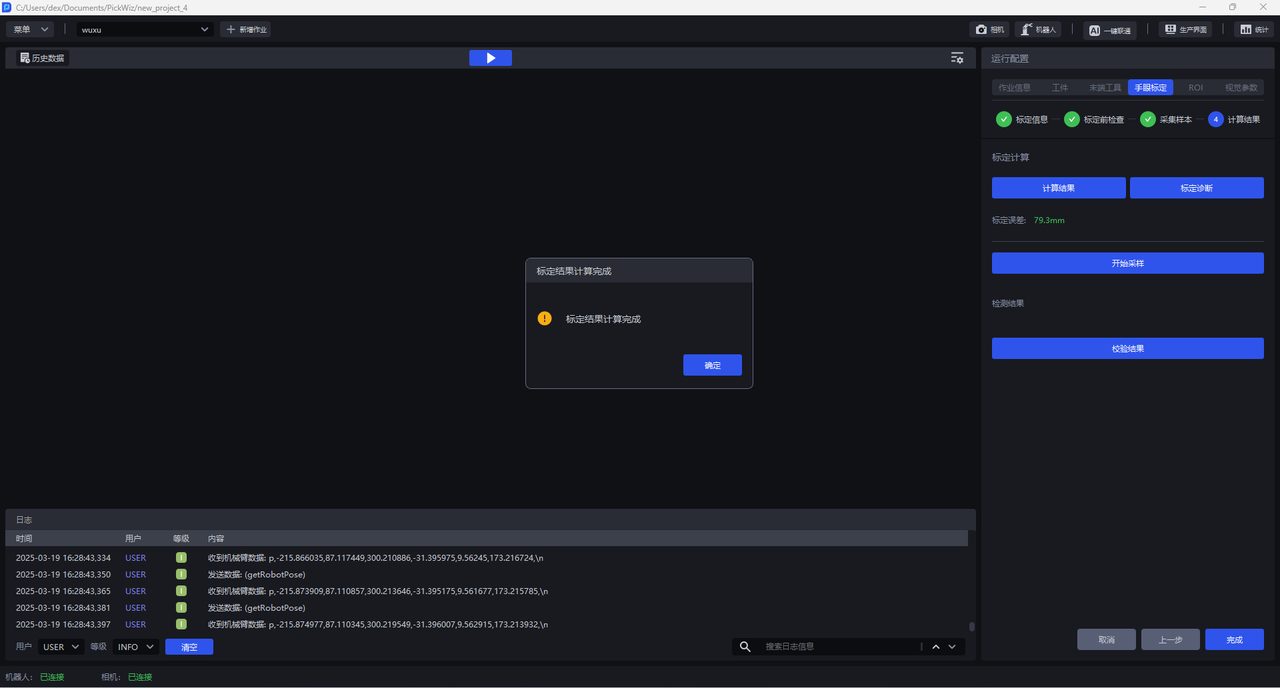
5. 标定结果检查与分析
如果标定误差超出正常范围,则需要定位误差原因,点击标定诊断,参考 标定结果检查与分析 分析标定结果,解决问题并再次检查直到标定结果精度满足场景要求。
6. 选择手眼标定配置
标定流程结束,回到运行配置界面,点击作业信息, 点击手眼标定的下拉框, 选中对应手眼标定配置。
