
外观
底托检测使用指南
底托检测功能在需要抓取底托的场景下开启,开启后可在正常工件抓取结束后进行底托的抓取,本文主要介绍开启底托检测后如何调整相关视觉参数。
1. 操作指南
底托检测功能适用于拆垛场景
- 当实际场景中有底托,在新建项目时,勾选底托检测功能;若新建项目时未勾选,则在作业信息界面,点击右下方编辑,然后勾选底托检测

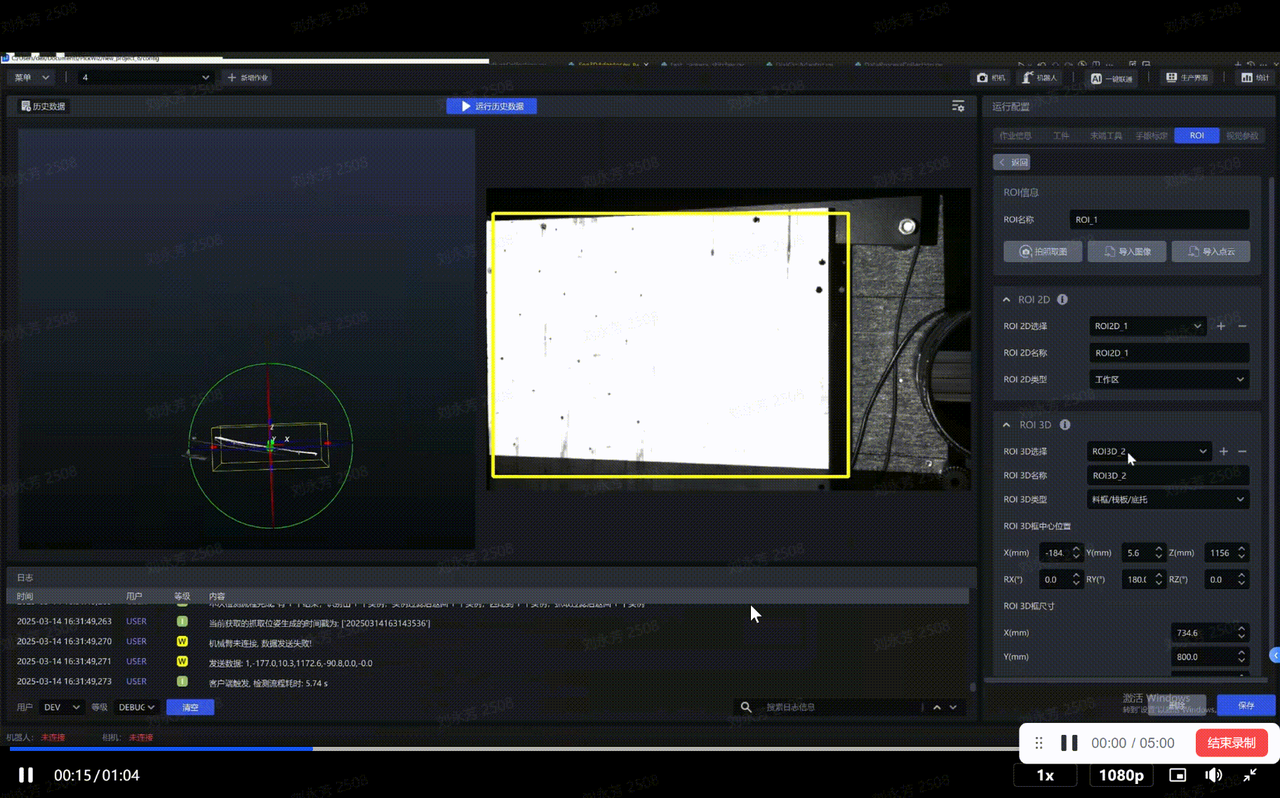
- 在ROI界面创建一个ROI,调整ROI 3D框将目标物体框全,然后新建一个ROI3D_2,选择ROI 3D类型为 料框/栈板/底托

调整ROI3D_2的大小仅包含底托区域
2. 调参指南
在作业信息选择好各配置项后,在视觉参数-3D计算-底托检测调整参数

| 参数 | 说明 | 默认值 | 取值范围 | 调参建议 | |
|---|---|---|---|---|---|
| 3DROI内最小点数 | 如果在ROI 3D工作区内提取的点云数量小于该值,则表示工件已经抓取完毕,自动进入底托检测部分 | 10000 | 0-100000 | 取值应该小于单个工件的点云数量 | |
| 点云平面分割 | 平面拟合的参考距离 | 点与平面的距离低于参考距离则被认为是平面内的点,将被保留,否则认为是平面外的点,将被过滤。取值越大,保留的平面越厚。 | 0.003 | 1e-6 ~ 10 | 点云精度要求高时该值减小,点云精度要求低时该值增大 |
| 去除平面 | 勾选则去除拟合的平面,不勾选则保留拟合的平面 | 不勾选 | / | 通常不需要调整 | |
| 旋转位姿,使Z轴方向与目标坐标系的Z轴一致 | 机器人构型 | 根据现场的机器人的机械臂轴数设置, 如果把六轴机器人当作四轴机器人使用,则应设置为四轴 | 四轴 | 四/六轴 | 根据现场需求选择 |
| 使用ROI的Z轴作为目标方向 | 机器人构型选择四轴时才生效,勾选则抓取位姿的Z轴方向与ROI坐标系的Z轴方向一致;不勾选则抓取位姿的Z轴方向与相机坐标系的Z轴方向一致 | 不勾选 | / | 通常不需要调整 | |
| 自定义坐标系 | 抓取位姿的坐标系 | 相机坐标系 | 默认坐标系;相机坐标系;ROI坐标系;机械臂坐标系 | 通常不需要调整 | |
| 按抓取姿态角度范围过滤 | 角度过滤阈值 | 计算抓取位姿的指定轴与ROI坐标系的指定轴之间的最大夹角,夹角大于角度过滤阈值的抓取点将被过滤 | 30 | -360~360 | 一般保持不变,若来料倾斜较大且需要抓取时建议增大阈值 |
| 是否取ROI指定轴的负方向 | 勾选则使用ROI坐标系指定轴的负方向进行角度计算, 不勾选则使用ROI指定轴的正方向进行角度计算 | 勾选 | / | 通常不需要调整 | |
| 抓取姿态指定轴 | 指定抓取位姿的某个轴计算夹角 | Z轴 | X/Y/Z 轴 | 通常不需要调整 | |
| 对齐坐标轴 | 指定ROI坐标系的某个轴计算夹角 | Z轴 | X/Y/Z 轴 | 通常不需要调整 | |