
外观
3D视觉引导套件硬件搭建
3D 视觉引导套件是跨维智能自研的包含硬件(相机、工控机)、软件(3D视觉引导软件)、AI算法的整套解决方案,用于解决3D视觉引导的各种典型场景。本文将介绍硬件(相机、机器人、工控机)的安装方法与连接方式。
1. 硬件介绍
3D视觉引导套件的硬件主要包含机器人、相机、工控机,具体如图:

机器人
机器人是一种经过编程的、具有一定自主性的机械装置,可以执行移动、操作或定位等任务。它们按照视觉系统输出的结果执行任务。
一个机器人单元通常由机器人本体、控制柜和示教器组成。
在需要高度自动化的工业应用中,可能会使用PLC(可编程逻辑控制器)来控制机器人的运动和操作。在需要进行更高级别的控制和监控时,机器人还可能使用上位机对机器人进行更复杂的编程和控制,例如路径规划、任务调度和运动控制等。
相机
相机是指跨维智能自研的3D工业相机,用于采集物体的图像与位置信息。
工控机
指为跨维智能提供运行环境的计算机设备。
可以使用跨维智能提供的工控机(推荐),或使用自有设备作为工控机。更多关于工控机的信息,请参考: 工控机配置说明。
2. 相机安装与连接
2.1 开箱检查
收到相机包装箱后,请确认包装箱完好无破损。
下图展示了相机包装箱内包含的物品和配件示例,仅供参考,请以实际合同为准。



| 类别 | 名称 | 功能 |
|---|---|---|
| 相机组件 | 3D相机 | 采集图像 |
| 相机组件 | 标配千兆网线 | 连接相机、传输数据 |
| 相机组件 | 标配电源线 | 连接相机、相机供电 |
| 相机组件 | 适配标定板 | 参数检查、外参校正 |
如有物品损坏或缺失,请联系跨维。
2.2 相机连接工控机
(1)选择合适的相机支架,使用相机连接件将相机固定在相机支架上,相机安装完成后,撕掉镜头保护膜。
相机连接件(黑色钣金件)图纸:图纸.STEP
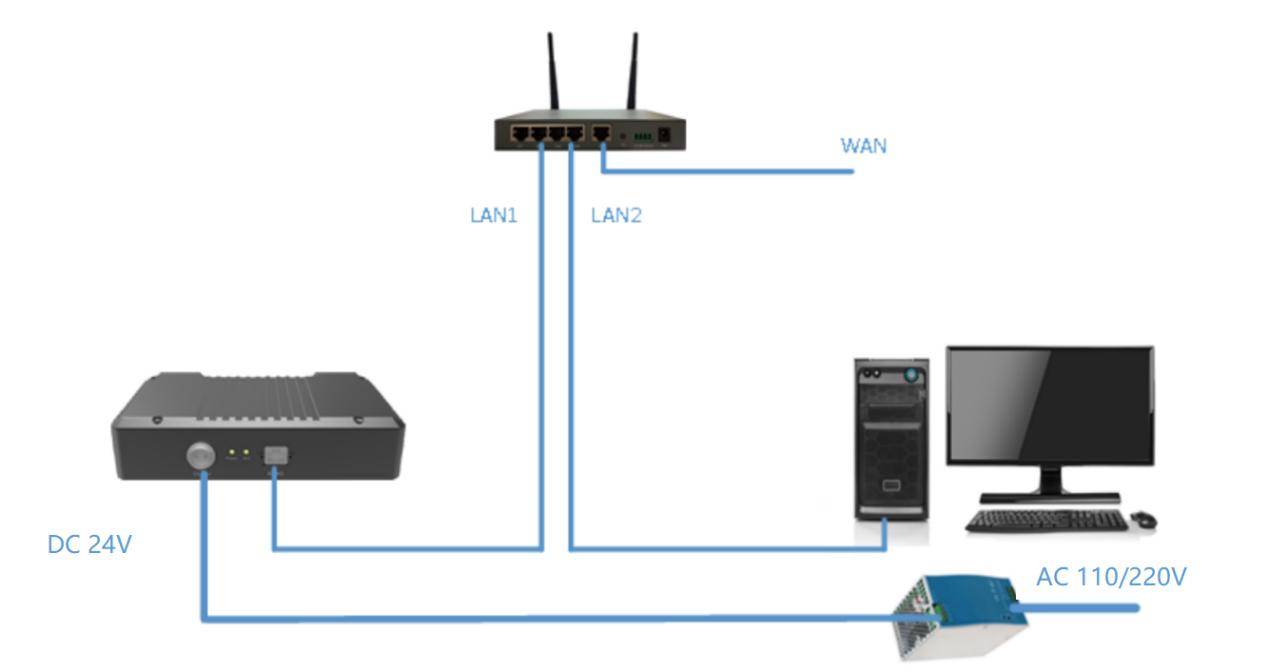
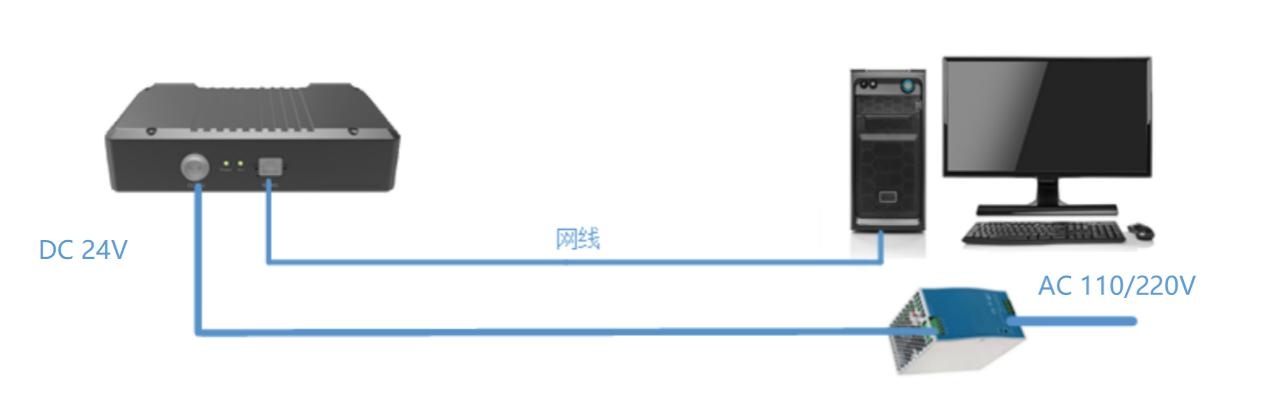
(2)连接网线,将网线一端连接相机,另一端直连工控机或经路由交互。
(3)连接电源,一段直插相机电源接口,另一端连接220v电源即可。
以下是相机布线示意图。
2.3 相机连接PickWiz
请参照相机连接与调参指南
3. 机器人安装与连接
3.1 机器人安装
(1)机械臂本体与机器人控制柜连接
机械臂本体与控制柜使用电缆连接,连接时需对齐方向缓慢插入。
(2)机器人示教器与控制柜连接
示教器电缆插入控制柜端口,然后把示教器放置在控制柜正上方。
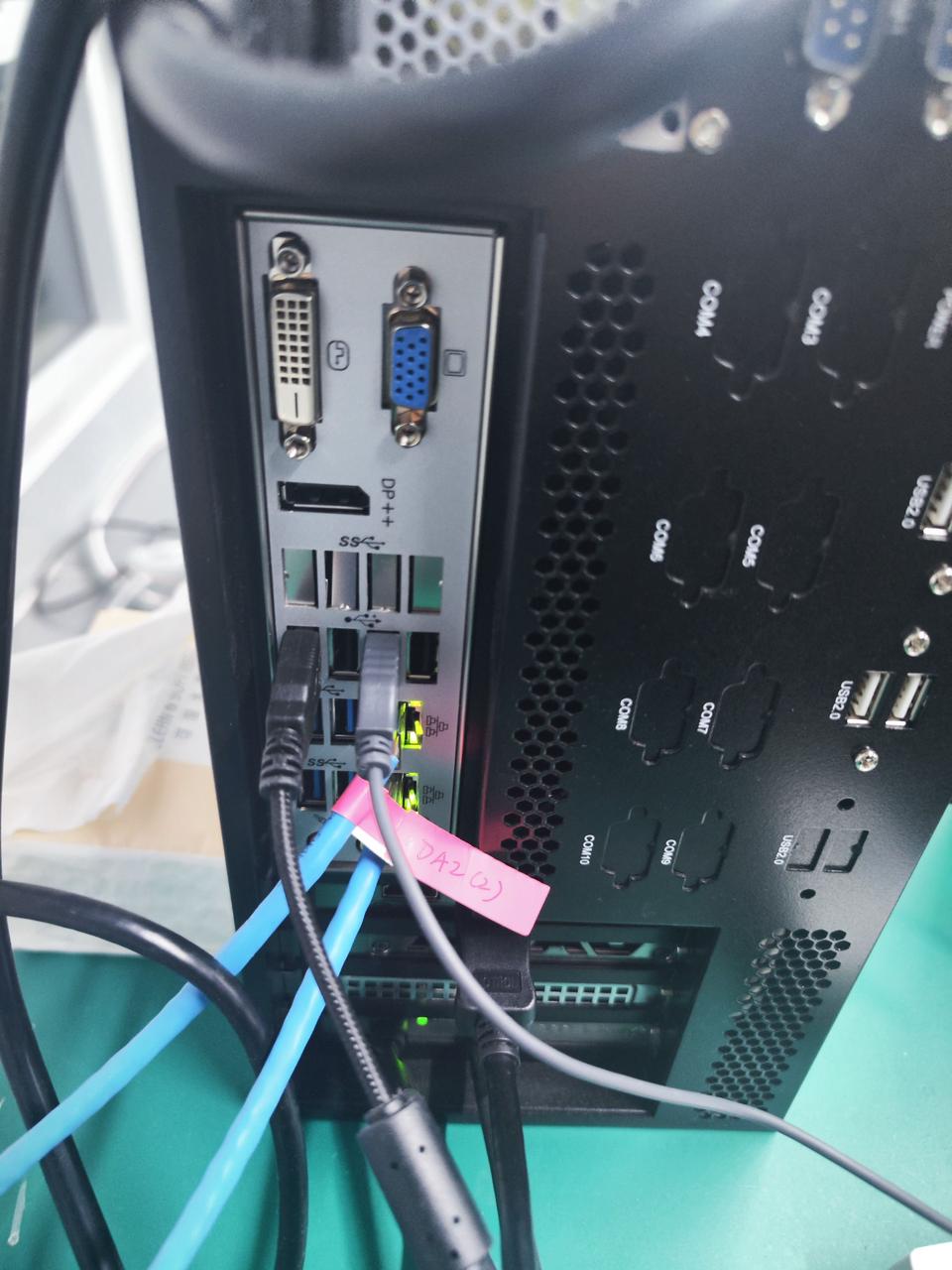
(3)网线连接机器人控制柜、工控机,如下图所示。

(4)控制柜上电
控制柜接通电源,示教器开机使机器人进入工作状态
3.2 检查机器人系统环境
示教器连接状态
控制柜网口、工控机网线连接状态
网段是否相同
是否开通TCP网络通讯包
机器人系统版本

3.3 机器人连接PickWiz
(1)请参照 机器人配置与通信操作指南 连接机器人和PickWiz 通信
3.4 通信测试
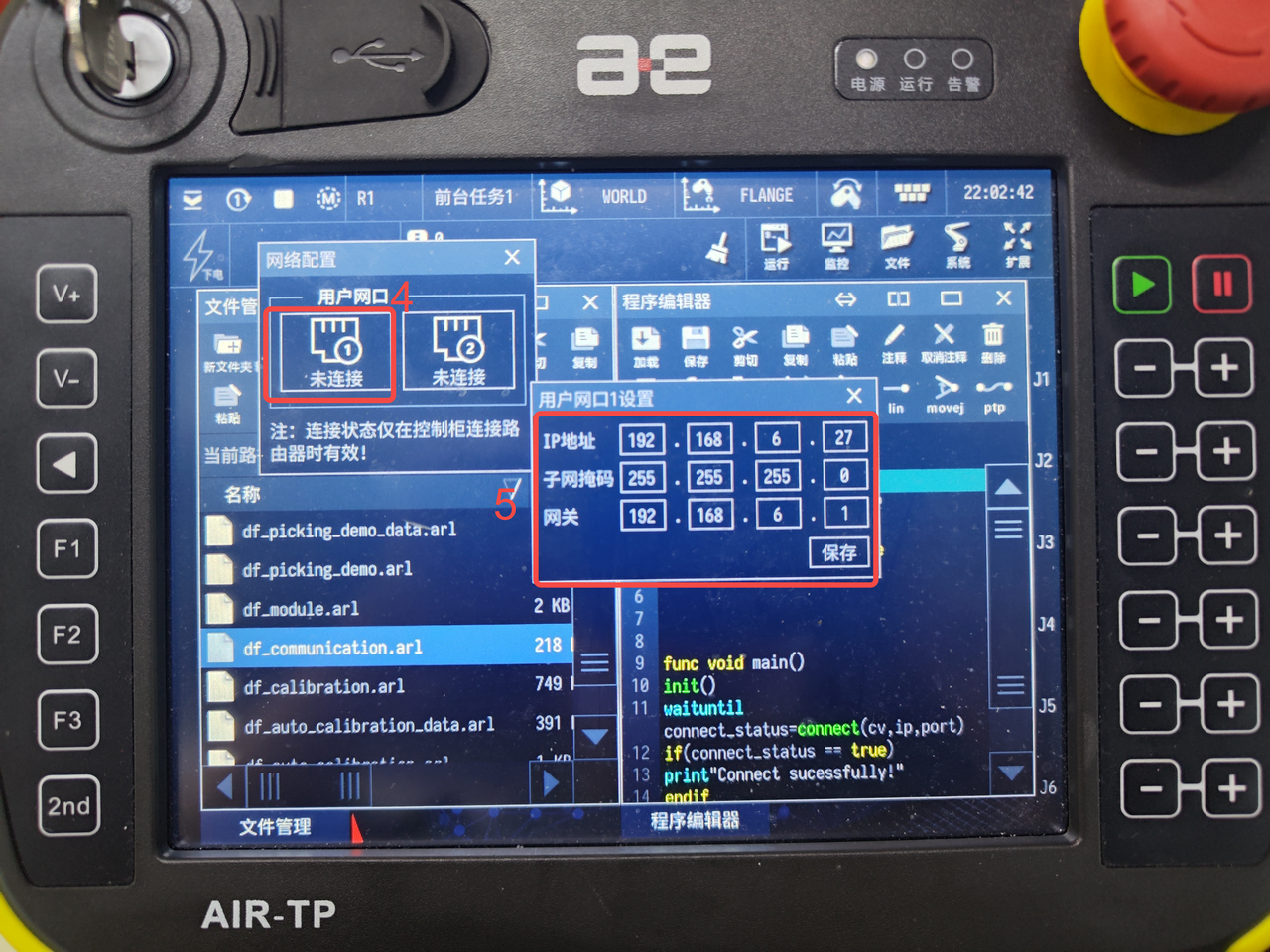
(1)切换程序,选择通讯测试文件df_communication.arl
(2)修改程序最上方的全局变量的ip和端口与工控机同步
(3)单步/连续运行
(4)查看Pickwiz,运行到connect函数,机械臂图标显示已连接,当运行到关闭连接时,图标显示未连接


(5)查看示教器,出现“Connect sucessfully!”的消息内容
