
外观
项目操作指南
项目是 PickWiz 的核心工作单元,包括机器人配置与通信、手眼标定、视觉参数等多个功能和作业配置,为机器人完成抓取任务提供高效灵活的解决方案,满足麻袋纸箱拆垛、无序抓取、有序上下料、定位装配等多类型的工业场景需求。
搭建项目的流程如下:

1. 新建项目
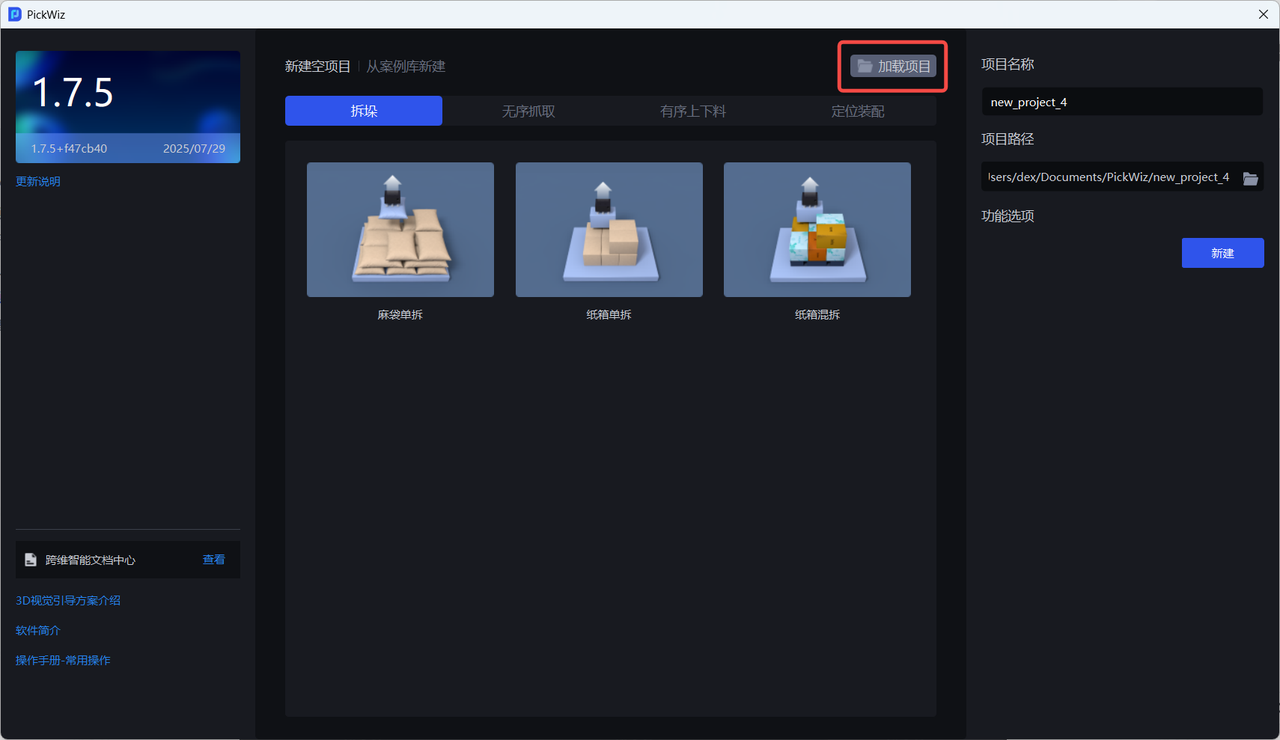
初次打开 PickWiz 软件,将进入欢迎页,如需新建空项目,请参照 1.1 新建空项目;
针对常见的典型应用场景,可从案例库中加载所需场景的项目,其中包含了场景的基础配置数据,可更快速地调试配置,具体请参照 1.2 从案例库新建项目。
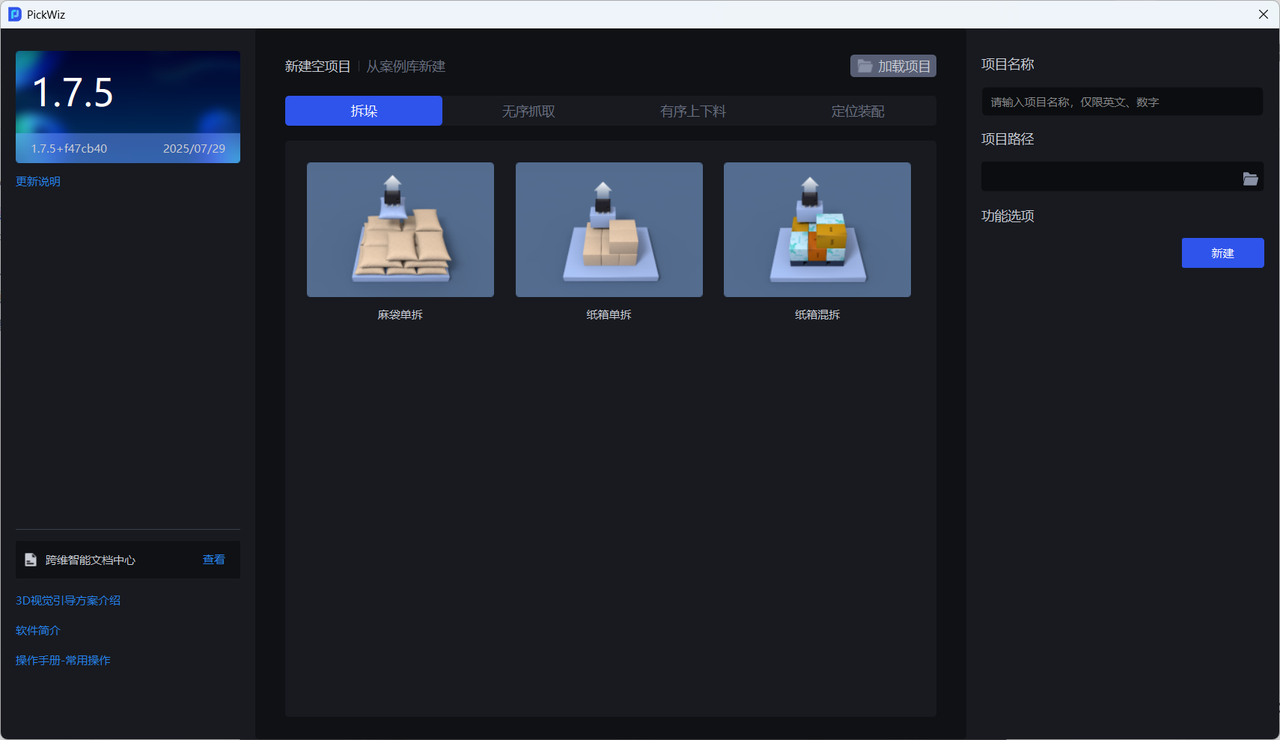
1.1 新建空项目
选择作业场景,按场景新建空项目
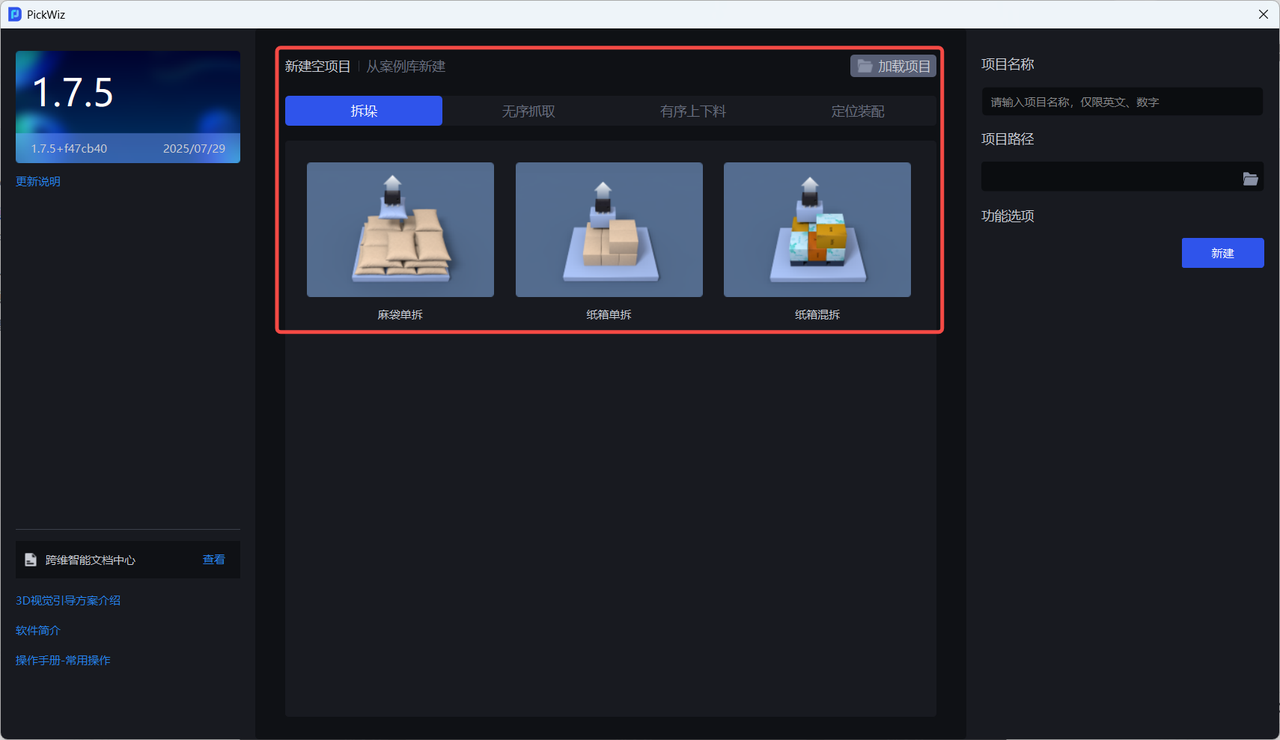
进入新建场景项目界面。
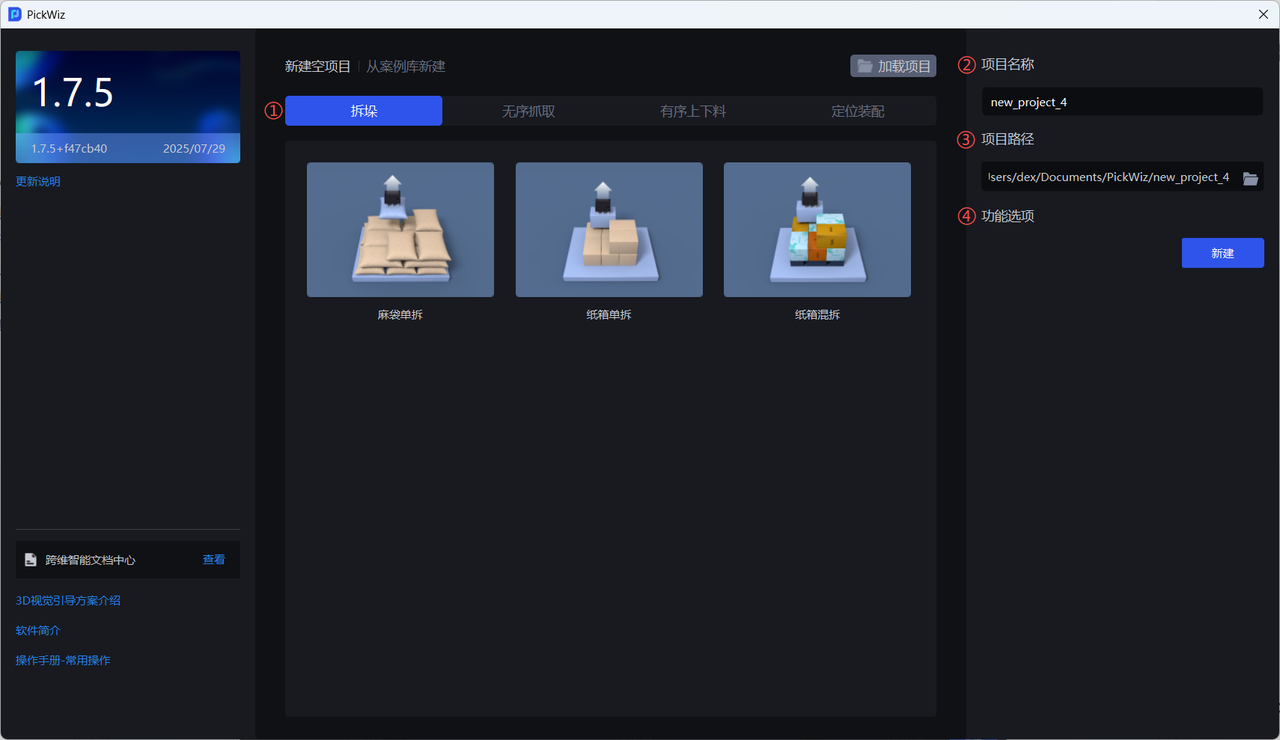
①选择作业场景
鼠标点击场景图片,可显示作业场景介绍
若物料为麻袋和纸箱,请查阅拆垛场景
若物料为堆叠的无序不规则摆放的工件,请查阅无序抓取场景
若物料为堆叠的有序规则摆放的工件,请查阅有序上下料场景
若相机视野内仅有单个需要定位的工件,请查阅定位装配
拆垛,是指把堆叠在一起的物料逐个分开搬运到特定位置的过程。
- 若物料为单一类型的麻袋,则选择麻袋单拆
- 若物料为单一类型的纸箱,则选择纸箱单拆
- 若物料为多种类型的纸箱,则选择纸箱混拆

无序抓取场景,是指机器人对无序不规则摆放的工件进行识别和抓取,完成上下料任务。
- 若工件为圆面型且无序不规则摆放,则选择基于圆面的无序抓取
- 若工件为圆柱体且无序不规则摆放,则选择基于圆柱体的无序抓取
- 若工件不是圆面和圆柱、正反面差异较大且无序不规则摆放,则选择通用工件无序抓取,该场景适用于大多数无序抓取场景,但正反面差异较小的工件不适用
- 若工件不是圆面和圆柱、正反面差异较小且无序不规则摆放,则选择面型工件的无序抓取
- 若工件不是圆面和圆柱、正反面差异较小、工件之间相互孤立且无序不规则摆放,则选择面型工件上下料(物料相互孤立)
有序上下料场景,是指机器人对有序规则摆放的工件进行识别和抓取,完成上下物料任务。
- 若工件为圆面型且规则有序摆放,则选择基于圆面的有序上下料
- 若工件为圆柱体且规则有序摆放,则选择基于圆柱体的有序上下料
- 若工件为四边形且规则有序摆放,则选择基于四边形有序上下料
- 若工件不是圆面圆柱四边形、正反面差异较大且规则有序摆放,则选择通用工件有序上下料,该场景适用于大多数有序上下料场景,但正反面差异较小的工件不适用
- 若工件不是圆面圆柱四边形、正反面差异较小且规则有序摆放,则选择面型工件有序上下料
- 若工件不是圆面圆柱四边形、正反面差异较小且规则有序摆放,同时还需要大幅减少视觉计算耗时,则选择面型工件有序上下料(并行化)
定位装配,是指相机视野内仅有单个需要定位的工件,例如对充电头进行单目标精定位,以便机械臂能够准确地插拔充电头。
- 若相机视野内仅有单个需要定位的工件、工件正反面差异较小且工件位置变动较小(ROI 3D 可以将工件完全框中,关于ROI 3D 请查看 ROI 操作指南),则选择面型工件定位装配(仅匹配)
- 若相机视野内仅有单个需要定位的工件、工件正反面差异较小且工件位置变动较大(ROI 3D 不能将工件完全框中,关于ROI 3D 请查看 ROI 操作指南),则选择面型工件定位装配
- 若相机视野内仅有单个需要定位的工件且工件正反面差异较大,则选择通用工件定位装配,正反面差异较小的工件不适用
②选择作业场景后,填写项目名称,默认为 "new project" + 项目序号,可自行修改
项目名称不能有中文、不能有空格
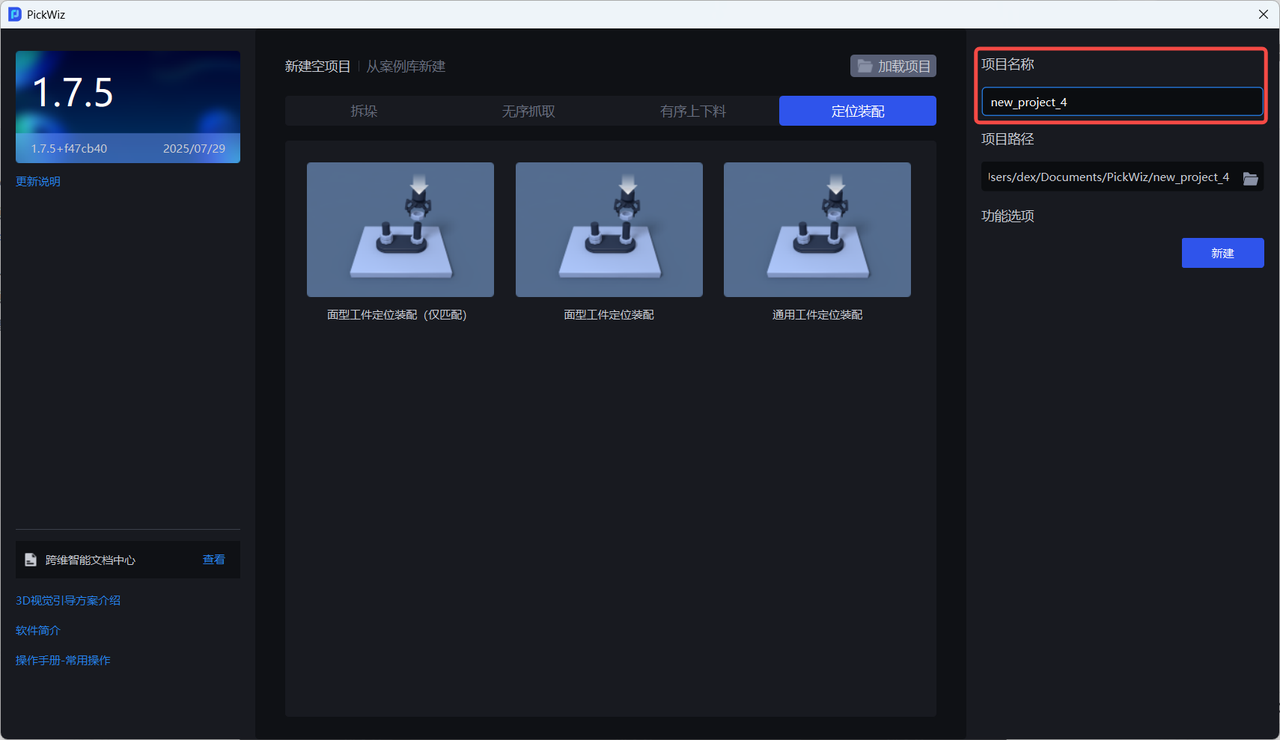
③选择项目路径,默认项目的存储路径是C:\Users\dex\Documents\PickWiz,可自行修改
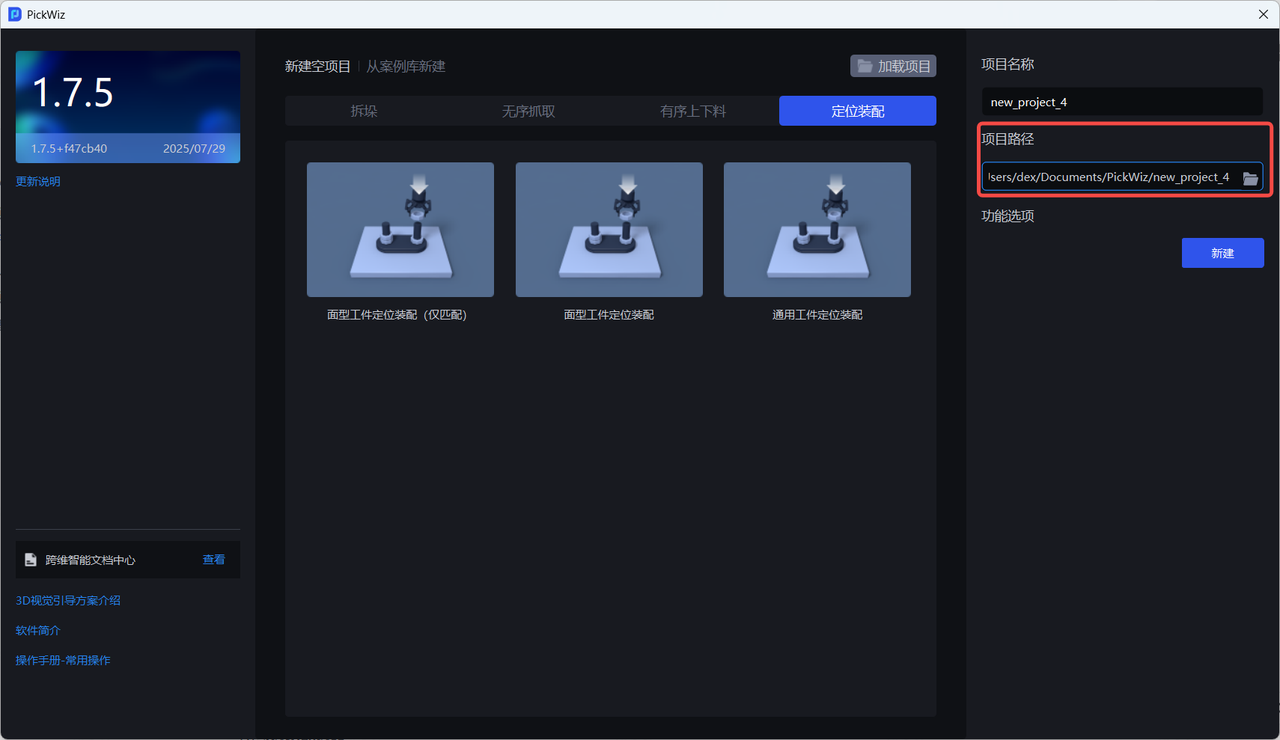
④勾选功能选项
每个场景有多个作业类型,每个作业类型对应多个功能选项,可根据实际工况选择
| 功能选项 | 描述 |
|---|---|
| 实例优化 | 优化模型生成的实例,对实例掩膜进行处理。 |
| 底托检测 | 用于检测底托,勾选后,视觉参数界面会增加底托检测相关参数,具体流程请参照 底托检测使用指南 |
| 隔板和底托检测 | 适用于每层物料间存在隔板,以及存在底托的场景,可通过视觉分类分别录入隔板、底托、工件三种数据类型,具体流程请参照 隔板和底托检测使用指南 |
| 碰撞检测 | 用于检测末端工具与容器的碰撞,过滤可能碰撞的抓取姿态;勾选后,需在 "场景物体" 中配置容器相关参数,同时视觉参数界面会增加碰撞检测相关参数,具体流程请参照 碰撞检测使用指南。 |
| 识别类型 | 通过一个深度学习模型,识别多种类型的工件;勾选后,需在工件界面,根据需求配置多种类型工件,然后采用内置的一键联通训练模型。具体流程请参照 识别类型使用指南 |
| 识别局部特征 | 通过工件的局部特征来定位工件;勾选后,需在工件界面,根据需求配置工件的整体信息和局部信息,然后采用内置的一键联通训练模型。具体流程请参照 识别局部特征使用指南 |
| 识别正反(通过点云模板) | 可导入工件正面和反面的点云模板,来匹配抓取工件的正面或反面,且针对工件正面或反面,可分别进行抓取点设置。具体流程请参照 识别正反(通过点云模板)使用指南 |
| 视觉分类 | 用于识别同一工件不同纹理、朝向等特征。开启后,可在工件界面录入同一物体不同类型的特征,并在视觉参数界面设置相关参数。具体流程请参照 视觉分类使用指南 |
1.2 从案例库新建项目
- 在欢迎页切换到
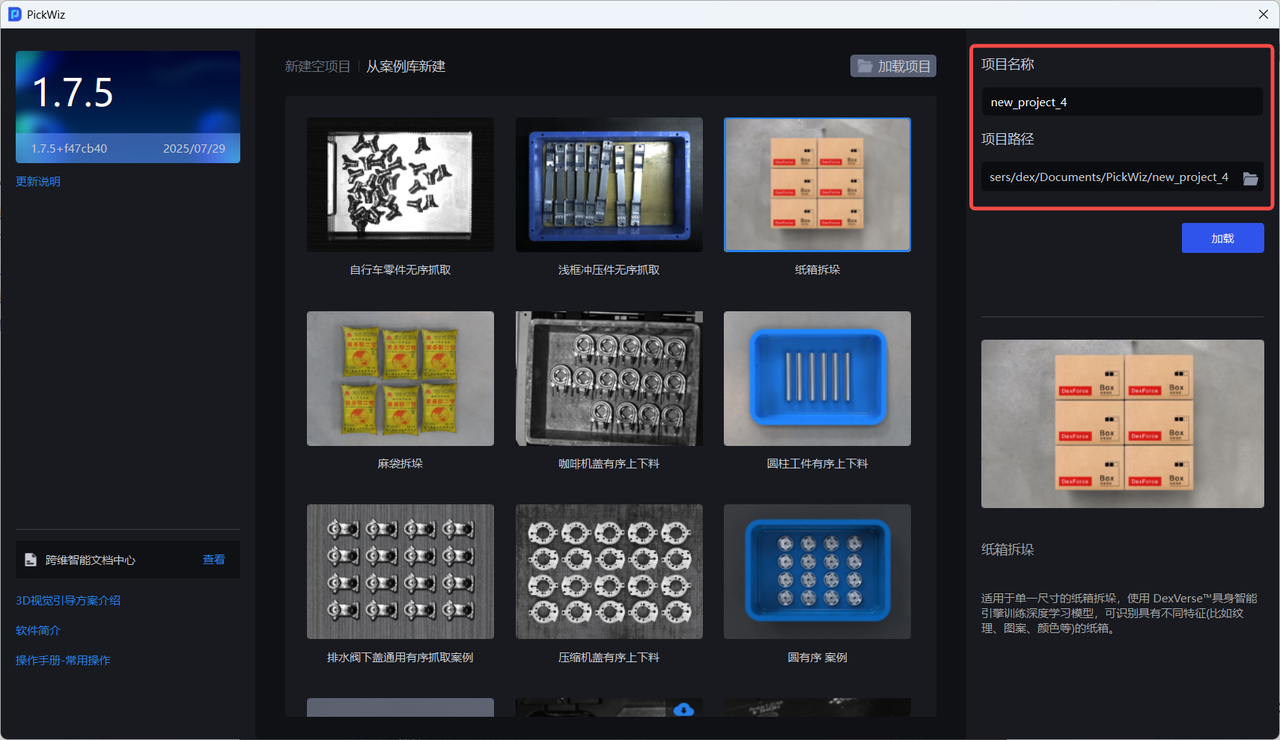
从案例库新建,选择所需场景的项目
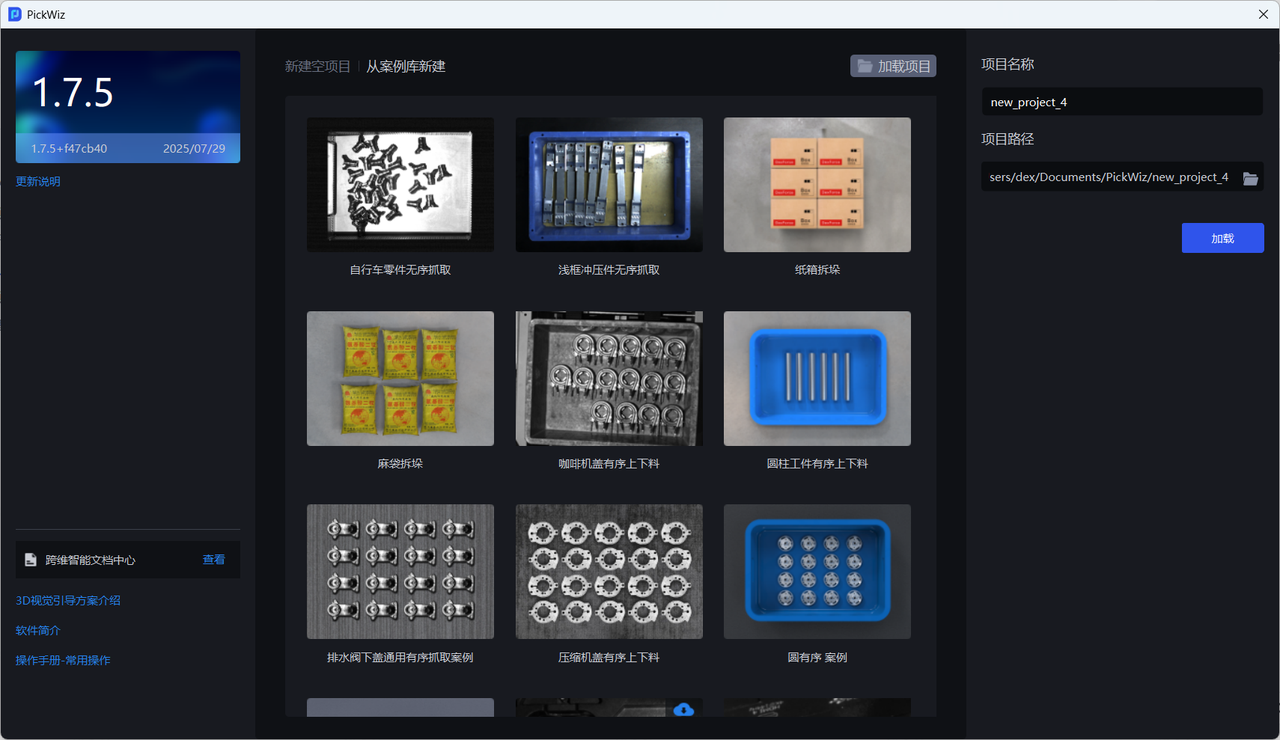
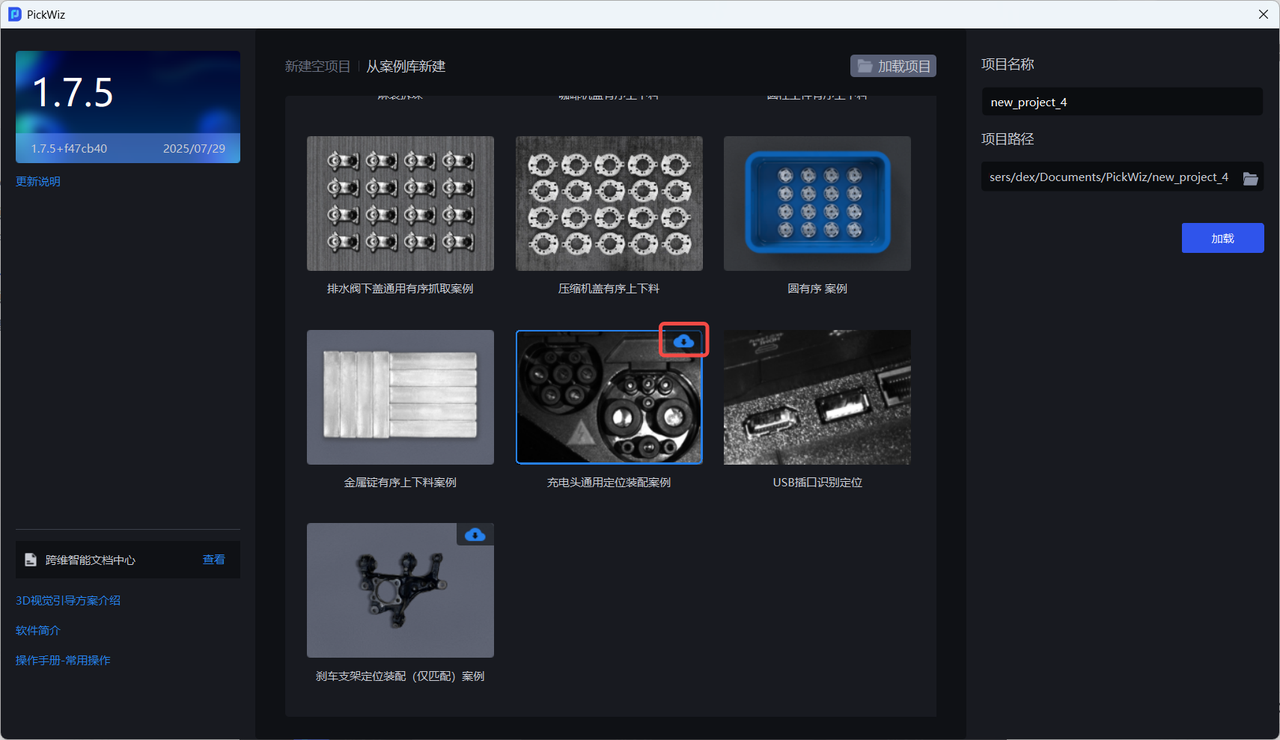
- 若初次使用该案例,需点击
下载按钮下载该项目配置
- 下载该案例的项目配置后,填入项目名称和项目路径即可。
2. 加载项目
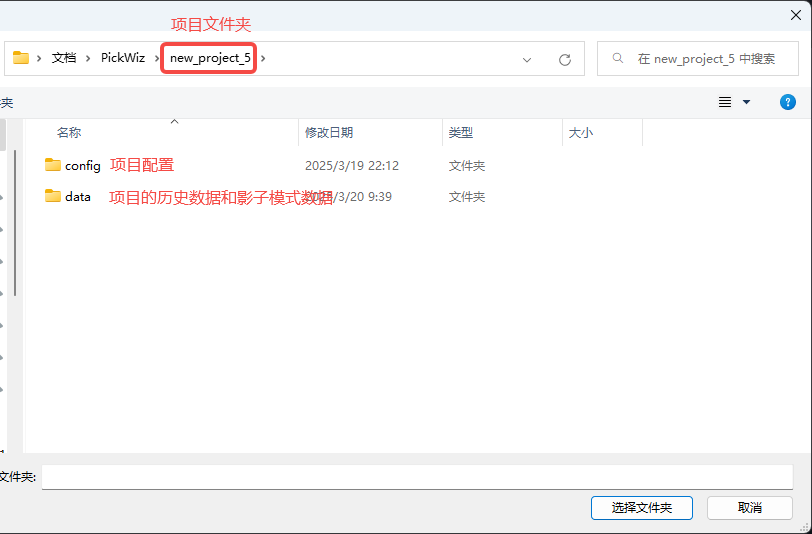
若需打开磁盘中已有的项目,可在欢迎页点击加载项目
打开对应的项目文件夹,选中项目,点击选择文件夹。默认的项目存储路径C:\Users\dex\Documents\PickWiz。
若打开项目时出现如下不兼容问题,请使用较低版本的 PickWiz 软件打开该项目,如有需要请联系跨维技术支持人员
3. 项目配置
打开项目配置文件夹config,可查看项目的配置数据,如下图所示

注意
不建议修改项目配置文件夹,否则可能导致 PickWiz 异常报错,无法正常使用。
| 序号 | 文件夹名称 | 配置名称 | 说明 |
|---|---|---|---|
| 1 | calibration | 手眼标定(新版) | 存储当前作业运行时的手眼标定(新版)配置 |
| 2 | camera | 相机 | 存储当前作业运行时的相机 和 相机参数 |
| 3 | end_effector | 末端工具 | 存储当前作业运行时的末端工具配置 |
| 5 | PickLightMidData | 可视化配置 | 存储可视化视窗对应的配置 |
| 6 | product | 工件 | 存储当前作业的工件配置 |
| 7 | robot | 机器人 | 存储当前作业运行时的机器人 |
| 8 | roi | ROI | 存储当前作业运行时的 ROI 配置 |
| 9 | roi2d | ROI 2D | 存储当前作业运行时的 ROI 2D 配置 |
| 10 | roi3d | ROI 3D | 存储当前作业运行时的 ROI 3D 配置 |
| 11 | scene_object | 场景物体 | 存储当前作业实际场景中的各类物体,包括料框、底托等 |
| 12 | strategy | 视觉参数 | 存储当前作业运行时的视觉参数配置 |
| 13 | dexforce_proj.json | 根配置文件 | 项目的根配置文件,该项目所有作业对应的各项配置均在此文件指定 |
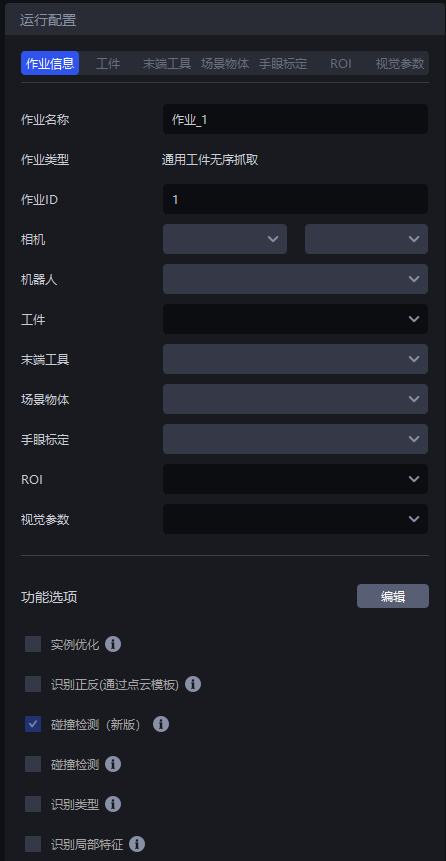
新建项目后,Pickwiz 将创建一个默认的作业,项目的配置数据可以与作业信息相对照
| 标签 | 说明 |
|---|---|
| 作业名称 | 当前作业的名称,可修改 |
| 作业类型 | 当前作业的类型,即作业场景,与新建作业时选择的作业场景对应,不可修改 |
| 作业ID | 标识当前作业,机器人可通过此 ID 切换作业 |
| 相机 | 当前作业运行时的相机 & 相机参数,连接相机、调整相机成像可参照 相机连接与调参指南 |
| 机器人 | 当前作业运行时的机器人,与机器人建立通信可参照 机器人配置与通信操作指南 |
| 工件 | 当前作业的工件配置,在工件界面中新增后配置到作业信息,新增工件可参照 工件操作指南 |
| 末端工具 | 当前作业运行时的末端工具配置,在末端工具界面新增后配置到作业信息,新增末端工具可参照 末端工具使用指南 |
| 场景物体 | 当前作业场景中的各类物体,包括料框、底托等,功能选项 中勾选 碰撞检测 、底托检测、隔板和底托检测后才会出现场景物体界面,新增场景物体后需要配置到作业信息,具体流程可参照 底托检测使用指南、 碰撞检测使用指南、 隔板和底托检测使用指南 |
| 手眼标定 | 当前作业运行时的手眼标定配置,在手眼标定界面新增后配置到作业信息,具体流程可参照 手眼标定操作指南 |
| ROI | 当前作业运行时的 ROI 配置,在ROI 界面新增后配置到作业信息,具体流程可参照 ROI 操作指南 |
| 视觉参数 | 当前作业运行时的视觉参数配置,在视觉参数界面进行配置,具体流程可参照 视觉参数调整指南 |
| 功能选项 | 点击"编辑",可选"碰撞检测"、"识别类型"、"识别局部特征"、"底托检测"等工况属性,选中和项目相关的工况属性,PickWiz 会根据选择的工况属性,匹配适配工况的功能配置,即在工件、视觉参数等相关配置中,添加选择的工况相关的配置。相关功能请查阅 功能选项使用指南 |