
外观
标定校验
在标定前,需消除以下3个因素对标定结果误差的影响:
其一,相机内参存在误差,包括镜头焦距、主点坐标、畸变系数,这些误差会扭曲图像信息,进而影响标定结果的准确性。针对此类误差,需要校正相机精度,确保相机内参的准确性。
其二,相机拍摄的点云存在误差,出现噪声、缺失或畸变等问题,点云不能真实反映工件姿态。通常需要调整相机成像参数,确保点云能够真实反映工件姿态,为标定提供准确的数据支撑。
其三,机器人存在误差,受机械臂的机械结构、传动部件精度等影响,机械臂自身存在绝对精度限制,导致末端工具在定位时存在一定偏差,进而影响标定结果的准确性。为此,需要对机器人进行精度校验,降低机械臂精度限制给标定过程带来的误差。
1. 校正相机精度
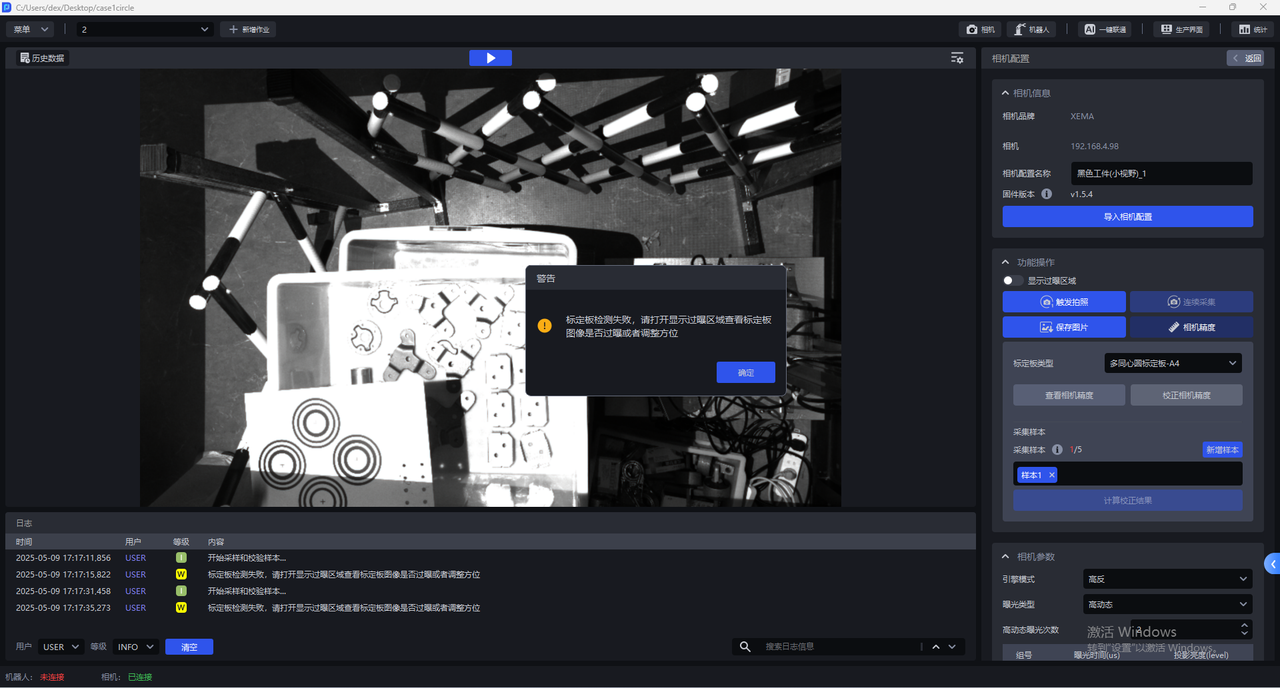
在校正相机精度前,应开启
显示过曝区域查看相机成像的曝光程度,如有过曝区域应调整单曝光的曝光时间,确保相机成像曝光正常。校正完成后,应当将相机参数切换回原本的配置。
- 在相机配置界面点击
相机精度

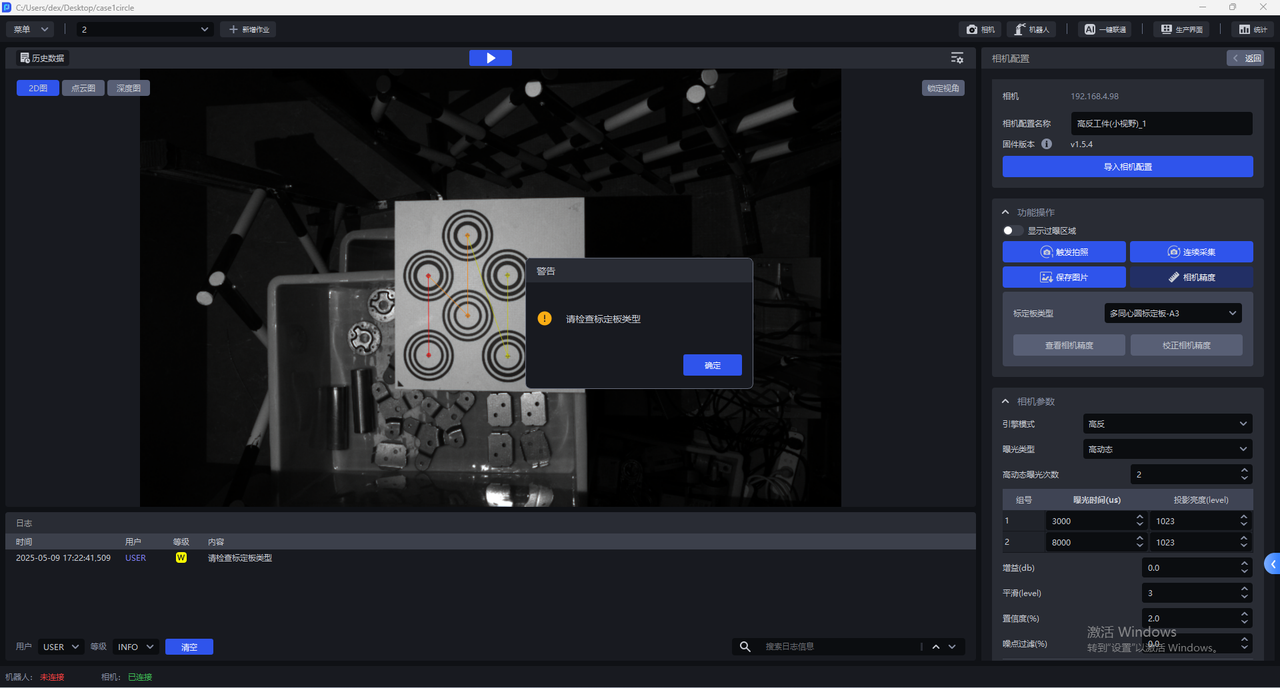
- 选择对应的标定板,若选择的标定板与实际不符,会弹窗警告"请检查标定板类型"弹窗,如下图所示,实际标定板为A4,若标定板类型选择A3会弹窗警告

- 选择正确的标定板类型后,点击
校正相机精度
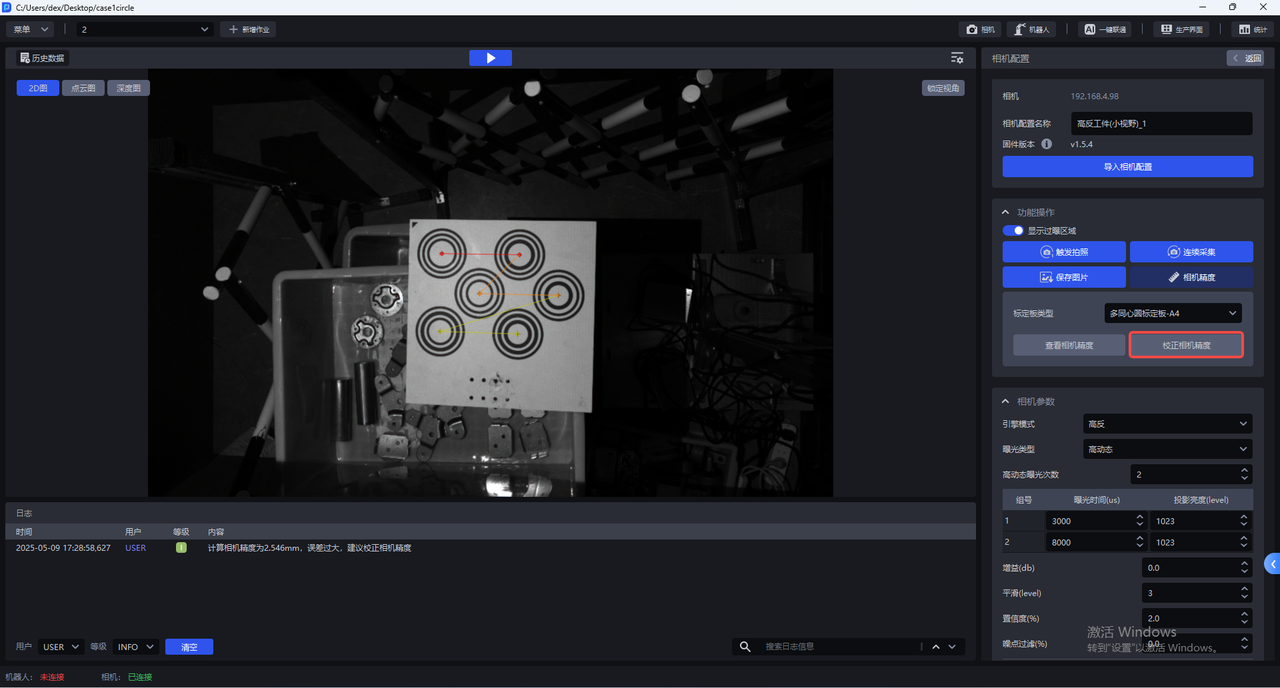
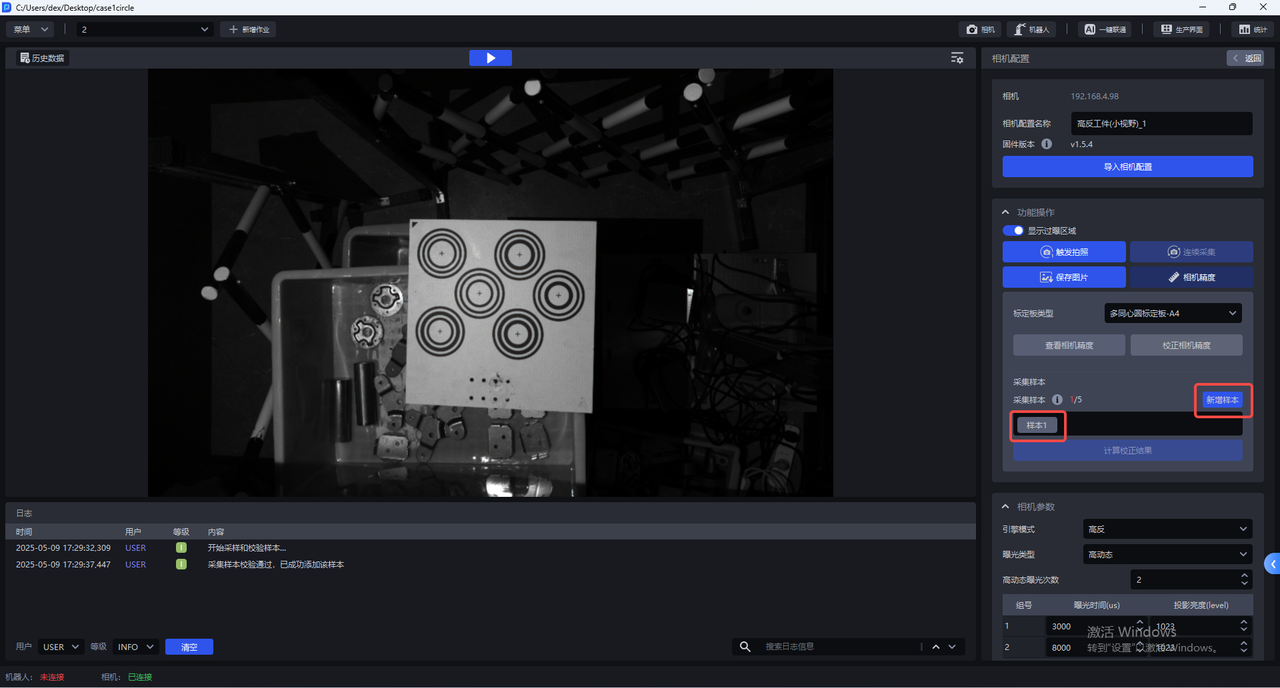
- 将标定板水平放置在相机视野范围的中央,点击
新增样本,相机开始采样和校验样本,若采集的样本校验通过,会添加到采集样本下方,如下图所示
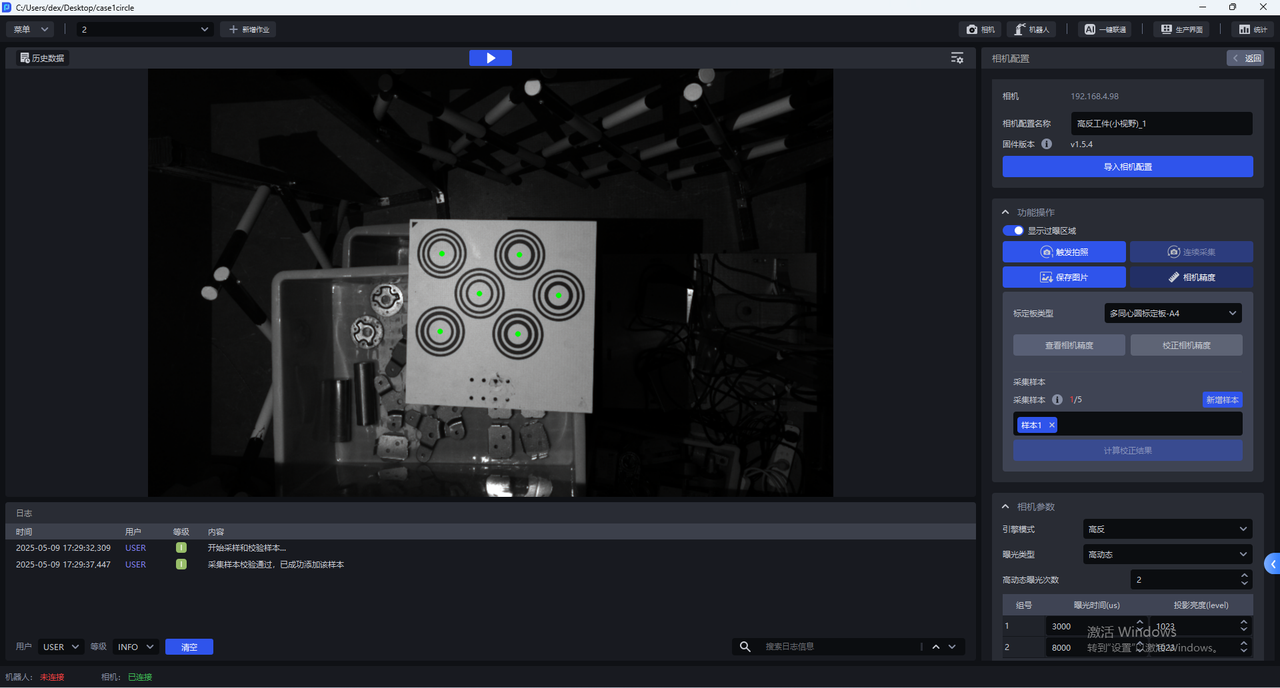
点击样本x,可查看采集的样本,校验通过的样本的标定板上所有同心圆的圆心变成绿色
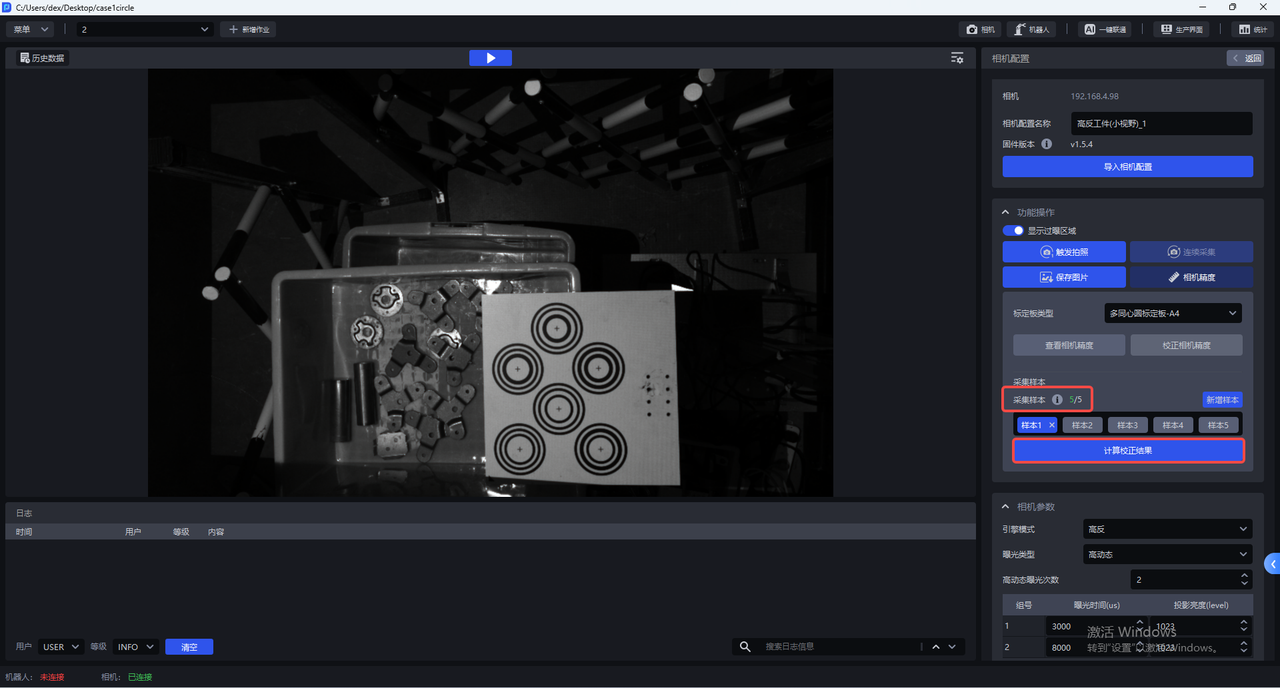
- 移动标定板到相机视野范围内的4个角落
新增样本,在每个角落将标定板垫起角度,标定板摆放角度在15-30°,倾斜角度不可过大过小




- 新增5个样本后,点击
计算校正结果
- 校正完成后,会弹出提示框"相机精度校正完成,校正精度为x,误差正常,是否覆盖当前的相机参数配置"
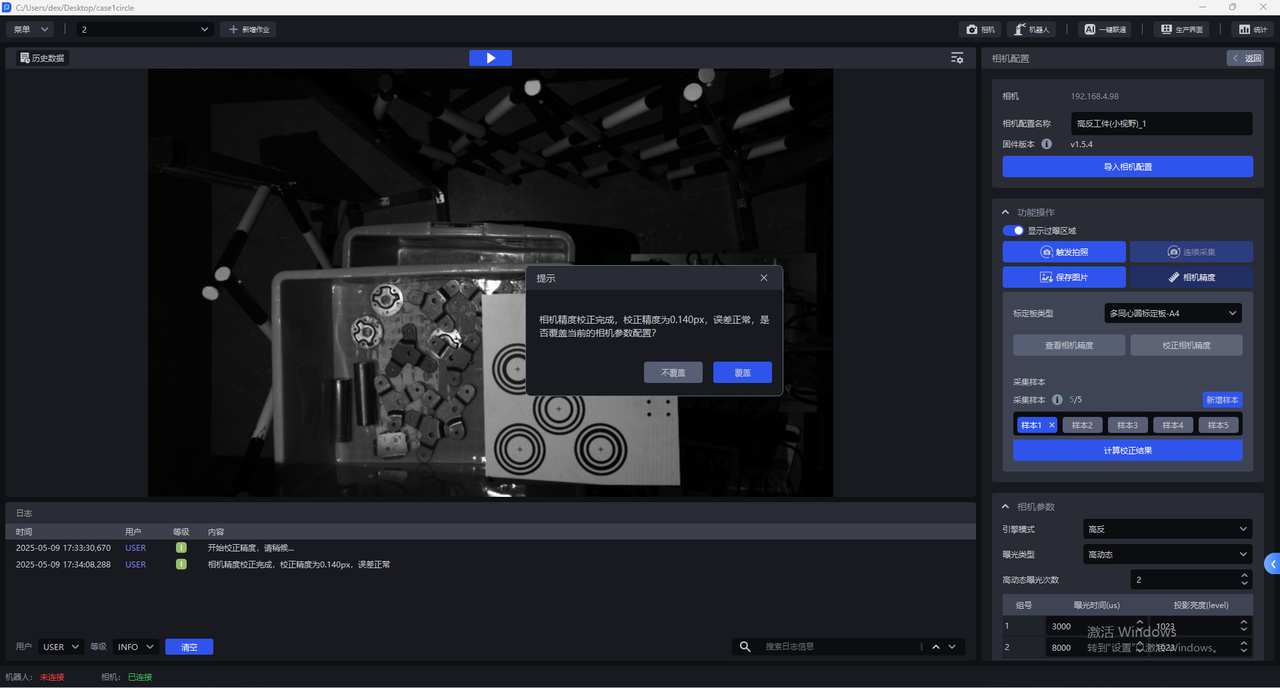
如选择覆盖当前的相机参数配置,会将相机精度校正结果更新到相机,需重启相机才能生效

2. 调整相机成像质量
在相机配置界面中,Xema、Finch、Sparrow系列相机参照 相机连接与调参指南调整相机参数,Kingfisher系列相机参照 KINGFISHER系列相机使用手册调整相机参数,直到标定板曝光正常,降低噪点数量,提升成像质量。
3. 机器人精度校验
在标定前,需确认机器人精度是否满足项目要求,若不满足,需在标定前校验机器人精度;
若相机精度满足要求、成像质量符合要求的情况下,标定结果误差仍然很大,则需要进行机器人精度校验。
3.1 眼在手外的机器人精度校验
对于眼在手外的标定,校验机器人精度是在标定前检查阶段,打开机器人精度校验

- 第一步:点击
获取初始姿态,相机拍照识别标定板,标定板初始姿态会更新相应的标定板位姿。若相机拍照识别不到标定板,应当控制机械臂携带标定板移动,重新识别标定板。
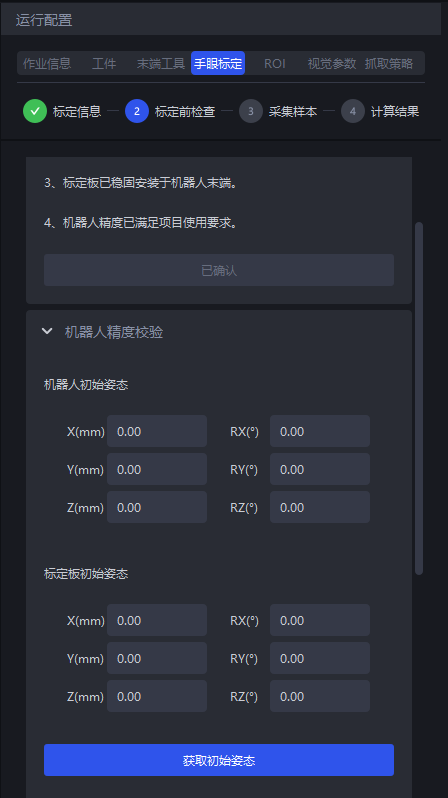
若在线获取坐标为是,PickWiz 会向机器人发送请求位姿指令,机器人将向 PickWiz 发送当前机械臂末端位姿,机器人初始姿态会更新当前的机械臂末端位姿,如下图所示。


若在线获取坐标为否,需手动输入当前机械臂末端位姿,如下图所示。

- 第二步:控制机械臂携带标定板平移较长距离,点击
获取终止姿态,相机拍照识别标定板,标定板初始姿态会更新相应的标定板位姿。若相机拍照识别不到标定板,应当控制机械臂携带标定板平移,重新识别标定板。
校验机器人精度时,控制机械臂携带标定板进行X方向或Y方向上的平移,不能有任何方向上的旋转
若在线获取坐标为是,PickWiz 会向机器人发送请求位姿指令,机器人将向 PickWiz 发送当前机械臂末端位姿,机器人终止姿态会更新当前的机械臂末端位姿,如下图所示。

若在线获取坐标为否,需手动输入当前机械臂末端位姿,如下图所示。
- 第三步:点击
校验精度按钮,查看机器人校验精度(绝对精度比值),该值不能大于0.005,否则可以认为机械臂绝对精度有问题,如下图所示。(该比值的计算方式为(1 - 标定板平移过的距离 / 机械臂平移过的距离))。


3.2 眼在手上的机器人精度校验
对于眼在手上的标定,校验机器人精度是在标定前完成的。
第一步:将标定板平放在水平的工作平台上,移动机械臂末端使其垂直对准标定板其中一个同心圆的圆心,记录标定板此时的位置作为标定板的初始位置,记录机器人示教器上的位姿作为机器人的初始位姿
第二步:标定板在X方向或Y方向上平移较长距离,控制机械臂与标定板同方向平移,使机械臂末端垂直对准标定板的同一个圆心,记录平移后的标定板上同一个圆心的位置作为标定板的终止位置,记录机器人示教器上的位姿作为终止位姿
平移后的机械臂末端应当垂直对准标定板的同一个圆心
机械臂末端进行X方向或Y方向上的平移,不能有任何方向上的旋转
第三步:计算机械臂末端从初始位姿到终止位姿的平移距离,使用带刻度的距离测量工具手动测量标定板从初始位置到终止位置的平移距离
第四步:机器人精度=(机械臂末端从初始位姿到终止位姿的平移距离)/ 手动测量的标定板平移距离,若计算得到的机器人精度≤0.005,认为机器人精度符合要求,否则认为机器人精度不符要求。