
外观
作业操作指南
作业,在 PickWiz 中是指机器人在特定的工业场景中执行的一系列相关任务的组合,具体任务包括拆垛、无序抓取、有序上下料、定位装配等。
在 PickWiz 中,作业是比项目更小的软件工作单元,包含了多种作业相关配置,其中有工件、末端工具、手眼标定、ROI(Region of Interest)、视觉参数、相机、机器人等。
1. 新建作业
1.1 新建第一个作业
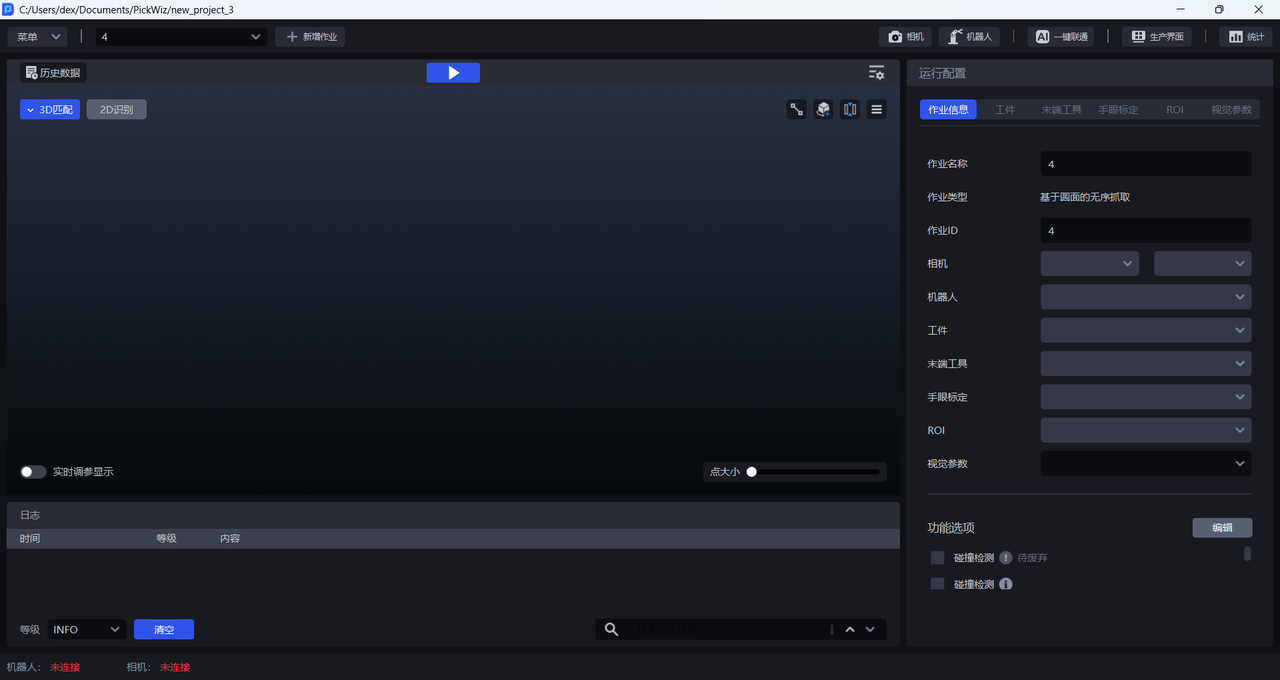
新建项目时需选择一个作业场景,新建项目后,PickWiz 默认提供第一个作业。请参照 项目操作指南 新建项目。
新建项目时会默认提供一个作业
1.2 新建多个作业
在某些工业场景中,可能会出现多个物料区,如零部件组装。在这种情况下,一个机器人需要同时抓取多种物料,或者在多个物料区之间进行移动作业,而且可能需要完成不同的作业任务,如拆垛、有序上下料、无序抓取等。
为了满足这种需求,在 PickWiz 中,可以根据不同的工况在同一个项目中新建多个作业,并进行后续的作业配置。这样一来,机器人就能够同时进行多项作业任务,大大提高工业生产效率。
点击主界面左上角 + 新建作业,界面会自动跳转至新建作业页。
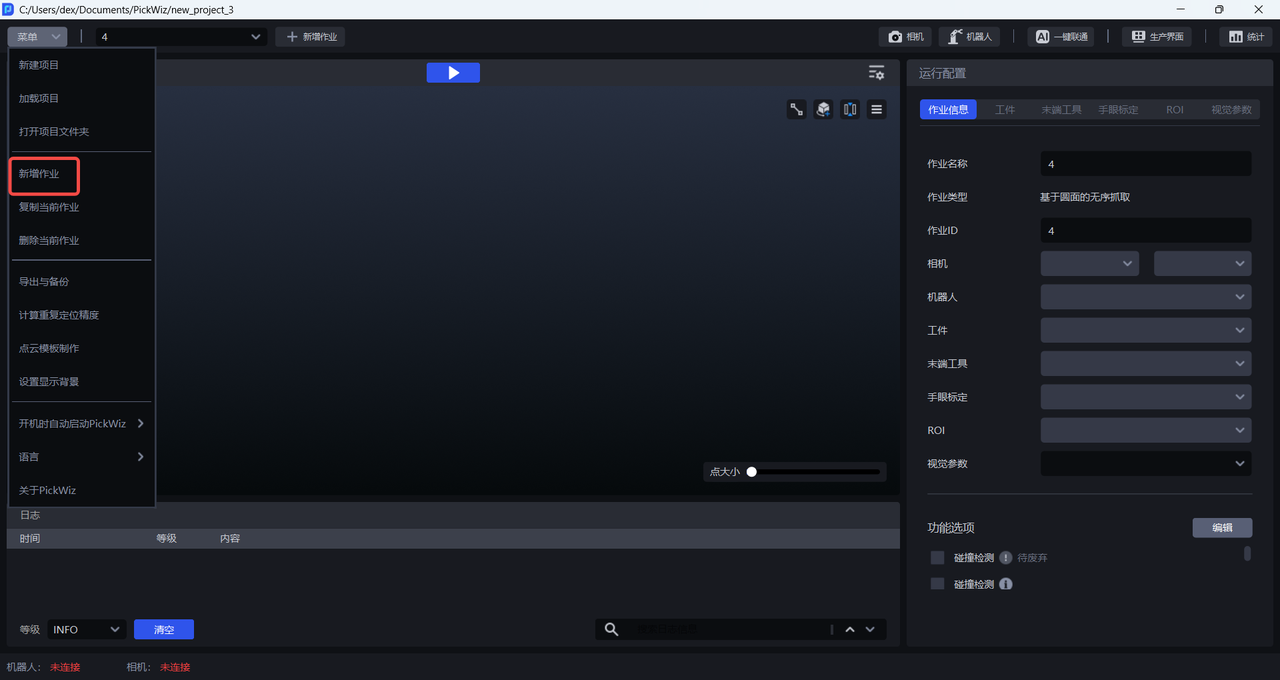
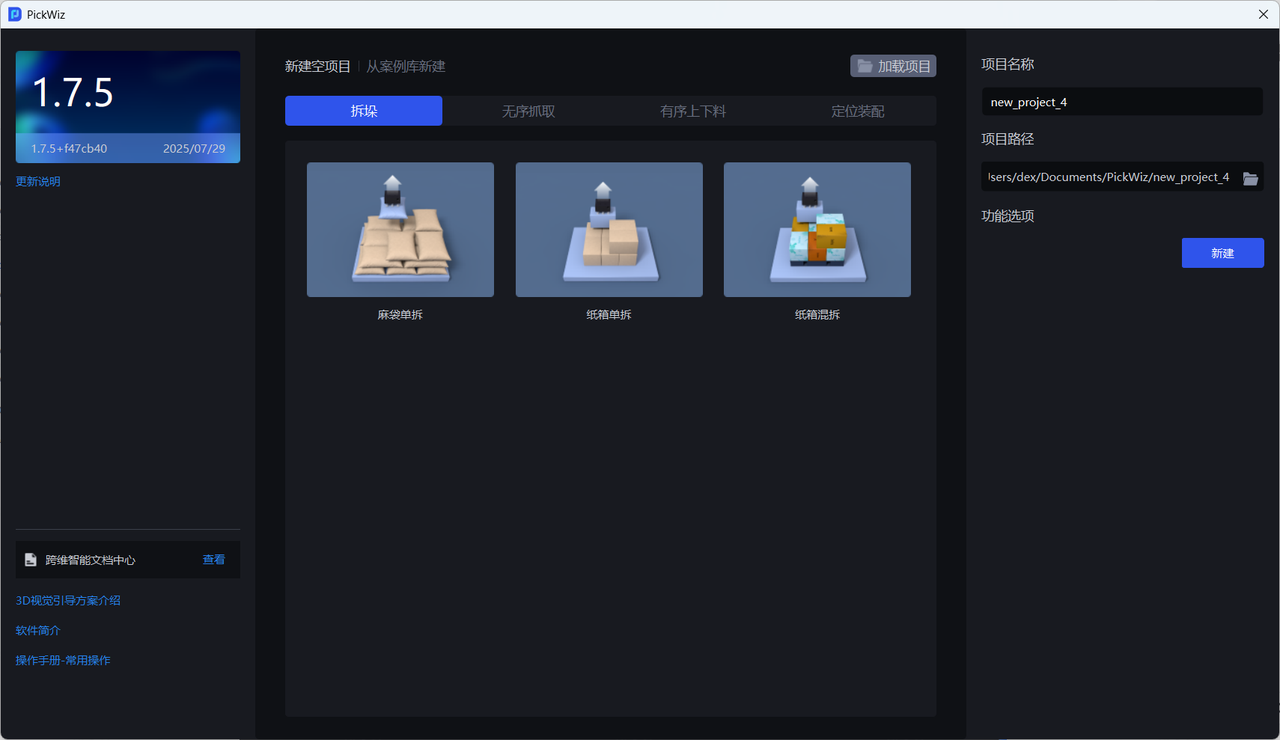
按照实际需求,选择对应的作业场景,输入"作业名称",最后点击新建即可新建作业。
请参考 3D视觉引导方案介绍 选择需要的作业场景
2. 配置作业
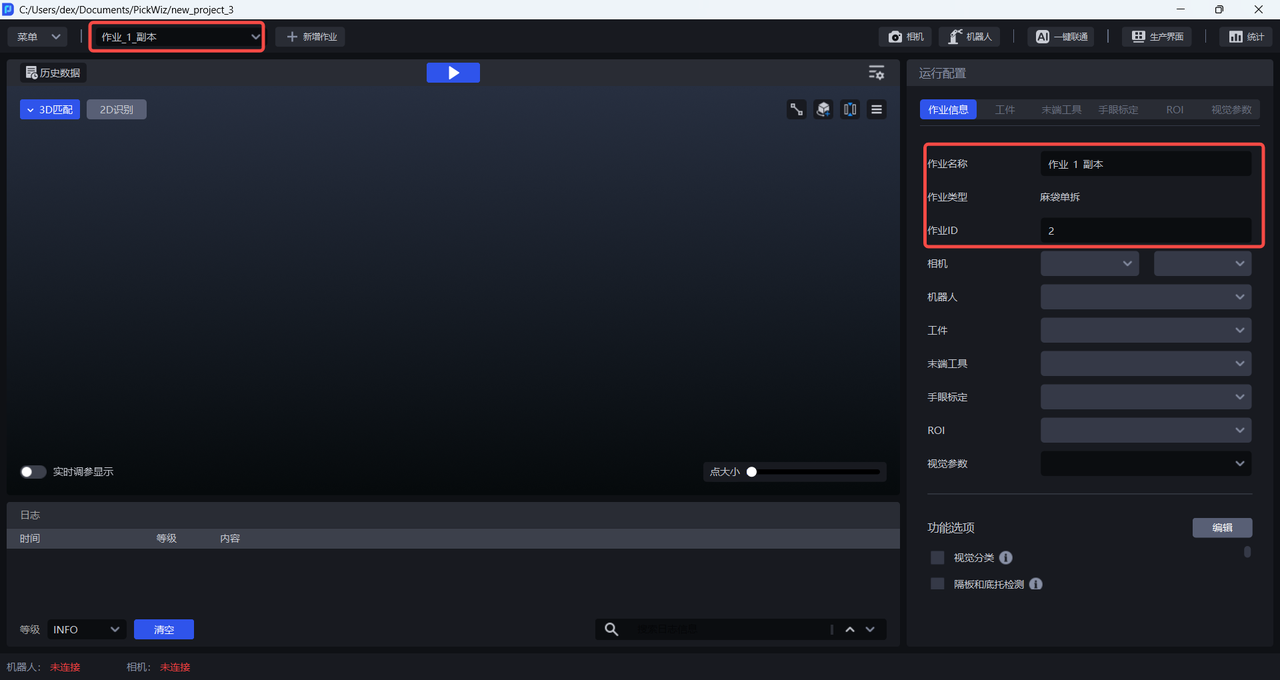
运行作业之前,需对作业信息中的所有配置项进行选择
| 配置项 | 描述 |
|---|---|
| 作业名称 | 当前作业的名称,可修改 |
| 作业类型 | 当前作业的类型,即作业场景,与新建作业时选择的作业场景对应,不可修改 |
| 作业ID | 标识当前作业,机器人可通过此 ID 切换作业 |
| 相机 | 当前作业运行时的相机 和 相机参数,连接相机、调整相机成像可参照 相机连接与调参指南 |
| 机器人 | 当前作业运行时的机器人,与机器人建立通信可参照 机器人配置与通信操作指南 |
| 工件 | 当前作业的工件配置,在工件界面中新增后配置到作业信息,新增工件可参照 工件操作指南 |
| 末端工具 | 当前作业运行时的末端工具配置,在末端工具界面新增后配置到作业信息,新增末端工具可参照 末端工具使用指南 |
| 场景物体 | 当前作业场景中的各类物体,包括料框、底托等,功能选项 中勾选 碰撞检测 、底托检测、隔板和底托检测后才会出现场景物体界面,新增场景物体后需要配置到作业信息,具体流程可参照 底托检测使用指南、 碰撞检测使用指南、 隔板和底托检测使用指南 |
| 手眼标定 | 当前作业运行时的手眼标定配置,在手眼标定界面新增后配置到作业信息,具体流程可参照 手眼标定操作指南 |
| ROI | 当前作业运行时的 ROI 配置,在ROI 界面新增后配置到作业信息,具体流程可参照 ROI 操作指南 |
| 视觉参数 | 当前作业运行时的视觉参数配置,在视觉参数界面进行配置,具体流程可参照视觉参数调整指南 |
选择所有配置项后,点击  按钮 即可运行当前作业。
按钮 即可运行当前作业。
3. 删除作业
(1)删除任意作业:点击作业下拉框查看所有作业,鼠标光标悬浮在需删除的作业上,会显示🗑功能按钮;点击🗑,即可删除该作业及其配置。
(2)删除当前作业:打开菜单,点击删除当前作业即可删除当前作业及其配置。
4. 复制作业
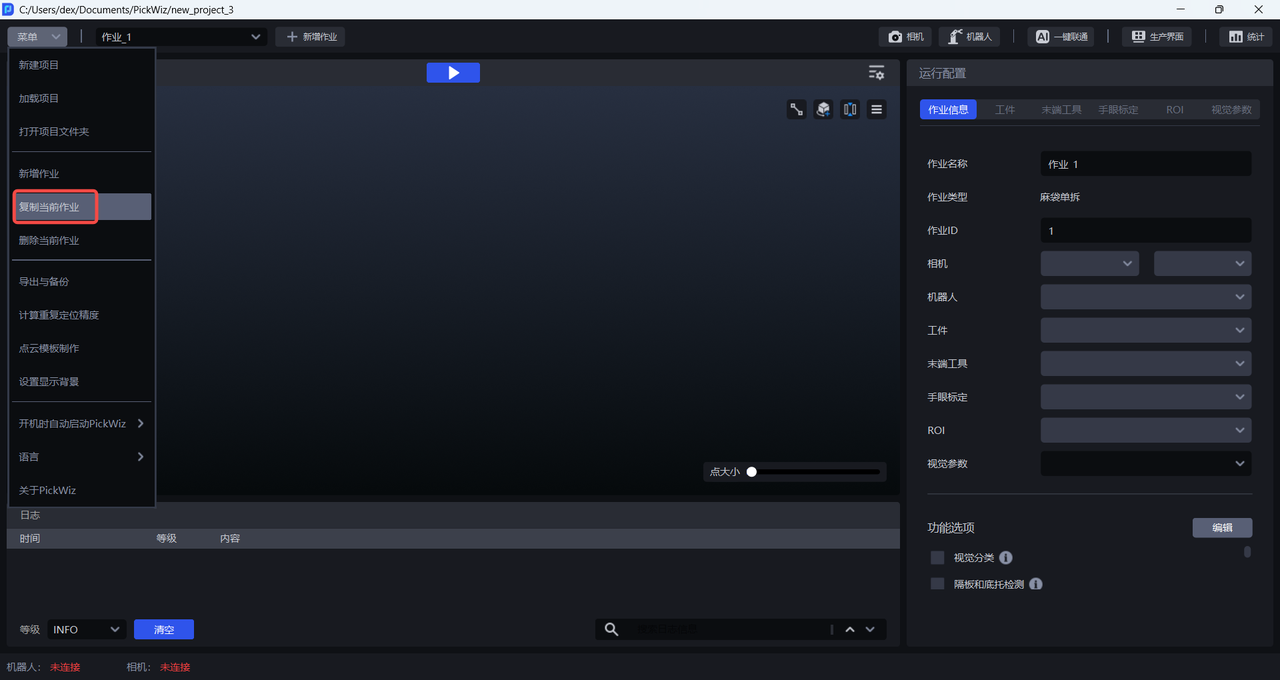
打开菜单,点击复制当前作业,可得到一个新的作业副本,该作业副本复制了原作业的所有配置。
5. 切换作业
在作业过程中,切换作业的方式有两种:Pickwiz 软件侧切换作业、机器人侧切换作业
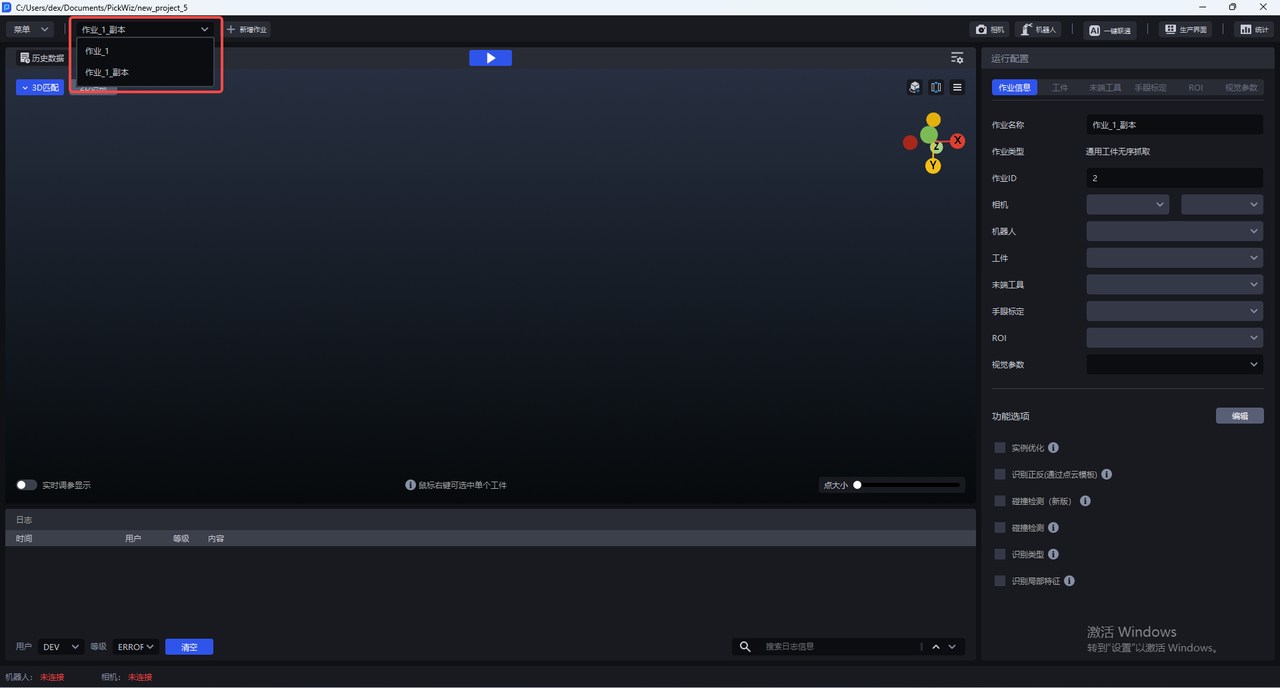
5.1 Pickwiz 切换
可在主界面左上角点击作业下拉框,选择当前需要运行的作业。
5.2 机器人切换
可以在机器人侧导入具备业务逻辑的工程文件,让机器人发送信号给 PickWiz 切换作业。机器人可通过指令内容{wid}(作业ID)与 PickWiz 进行通信,并完成作业的切换。
Pickwiz 和机器人之间的通信方式和指令,请参照 机器人配置与通信操作指南