
外观
视觉温漂实时校正指南
1. 新建标定球作业
新建【定位装配】场景的标定球作业并配置好作业
运行标定球作业,得出检测的抓取位姿作为视觉温漂校正的基准位姿,记录下方步骤会用到
2. 配置视觉漂移校正参数
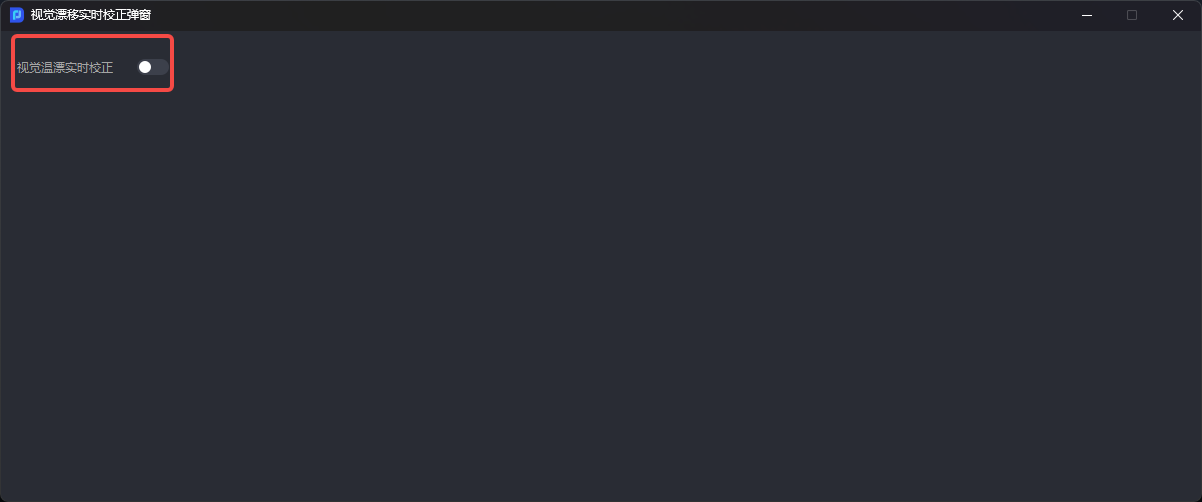
- 从软件菜单栏选择【视觉温漂实时校正】

- 在弹窗中打开【视觉温漂实时校正】开关,配置【视觉温漂作业】、【报警阈值】和【视觉位姿】(值为步骤1中标定球作业运行得到的抓取位姿)

3. 校正实际作业
- 校正操作只能通过机器人触发运行,配置待校正作业的机器人配置中的【视觉检测发送指令】如下,co=4 表示触发标定球运行,会算出一个漂移量
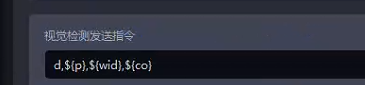
可在
PickWiz发送至机器人指令中配置字段in_dt,表示是否满足漂移校正阈值校验,如在阈值校验范围内或未开启视觉漂移实时校正时in_dt=1,否则in_dt=0测试校正效果
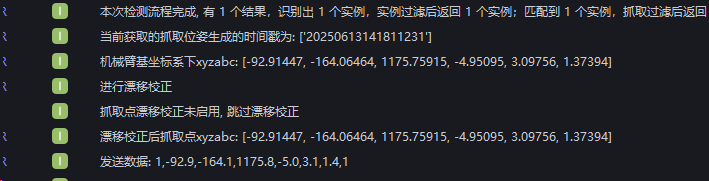
先关闭视觉温漂校正开关,手动触发作业运行,记录当前位姿【表示偏移前的位姿】
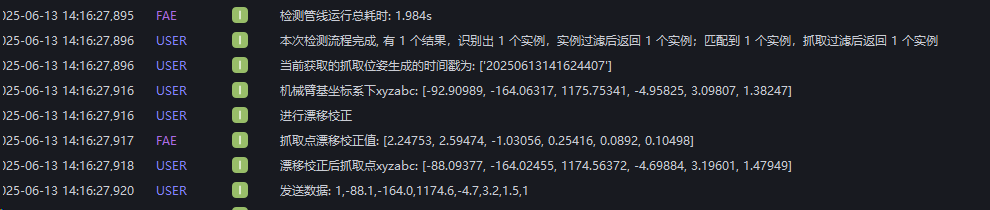
再打开视觉温漂校正开关,通过机器人触发实际工件作业运行,得到漂移校正后的位姿【有个误差范围上下5mm范围内】
未补偿时坐标
补偿后坐标值
4. 关闭校正功能
在【视觉温漂实时校正弹窗】中关闭【视觉温漂实时校正】开关即可
注意:
手动点击界面运行去触发标定球作业,不会补偿,只有通过机器人触发并配置对应的发送指令运行才会补偿;
当标定球作业执行后,阈值超出,后续运行所有其它普通作业,都会一直报警,并给机器人发送异常信号
现场定制实现逻辑,阈值超出信号输出'0,0,0,0,0,0,0'