
外观
可视化实时调参操作指南
软件提供 实时调参显示 功能,在实时调参模式下,可视化视窗能够实时观察调参后的视觉结果,提高调整视觉参数的易用性和流畅性。本文将介绍 实时调参显示 功能的使用方法。
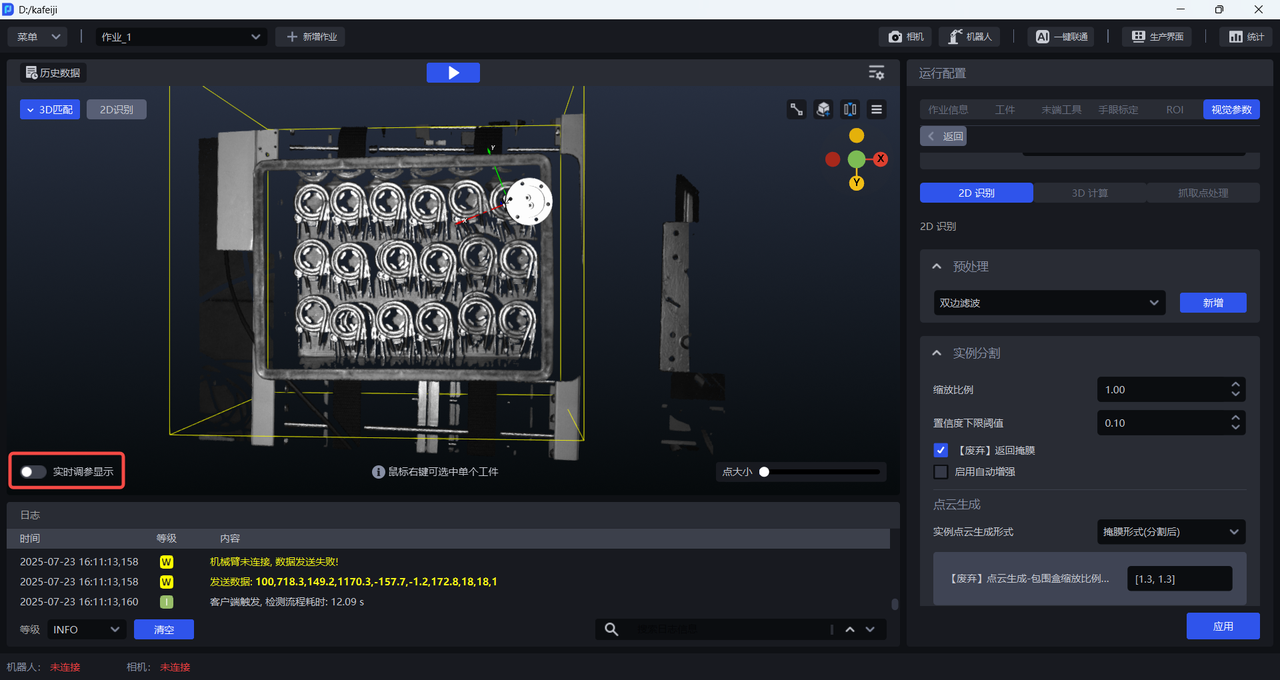
1. 开启实时调参显示
将作业信息各个配置项配置完成后,点击可视化视窗左下角的实时调参显示来开启实时调参模式。
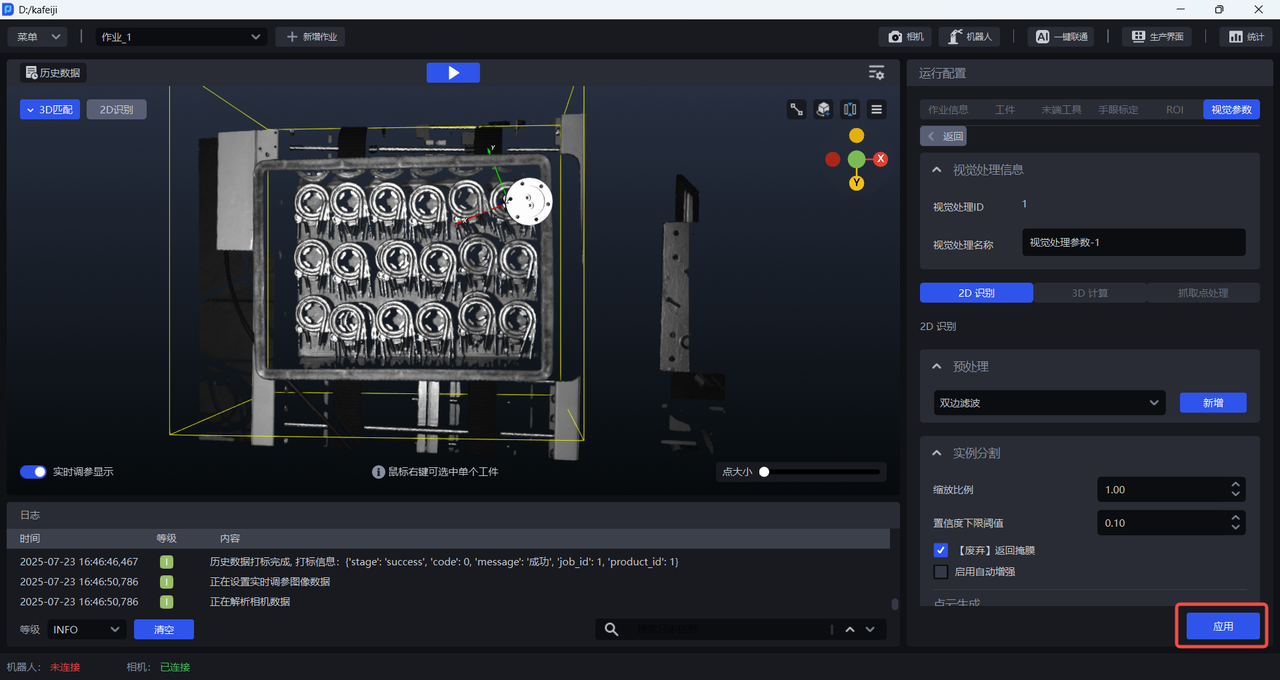
2. 调整视觉参数
打开视觉参数界面,修改2D识别、3D计算、抓取点处理下的视觉参数,可参照视觉参数调整文件进行调整。
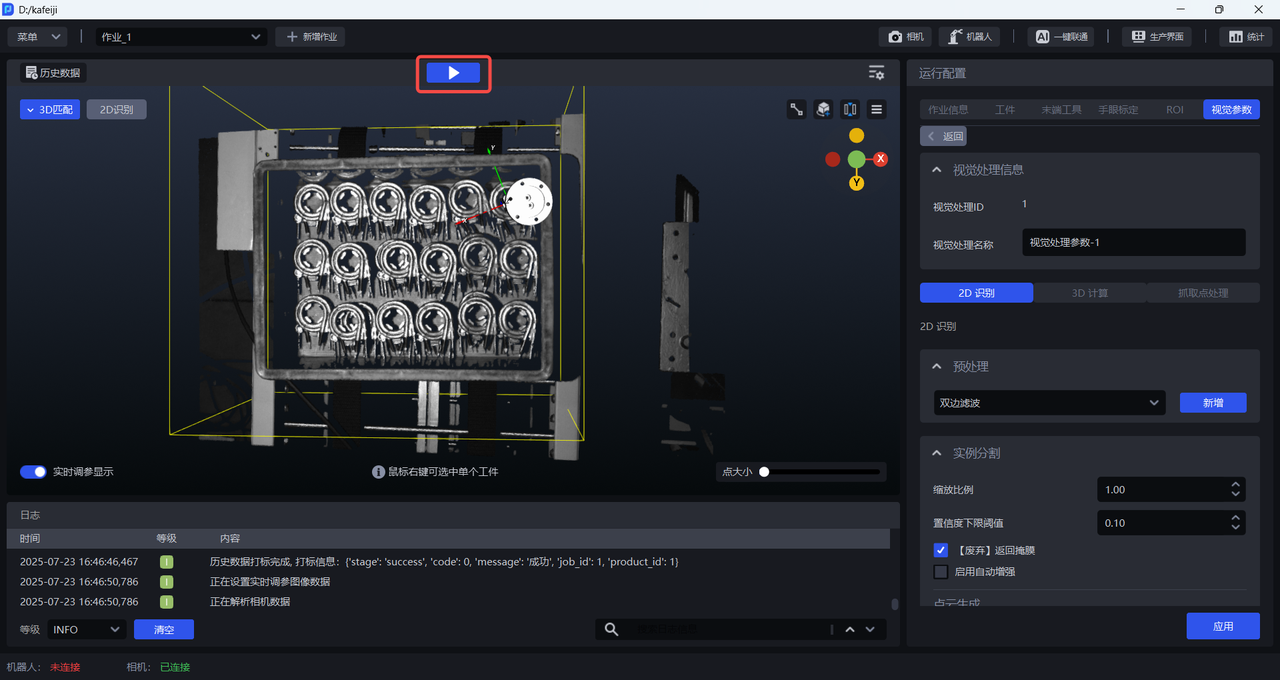
调整视觉参数后,点击 应用 ,或 主界面的 运行按钮 ,在可视化视窗查看调参后的视觉结果。
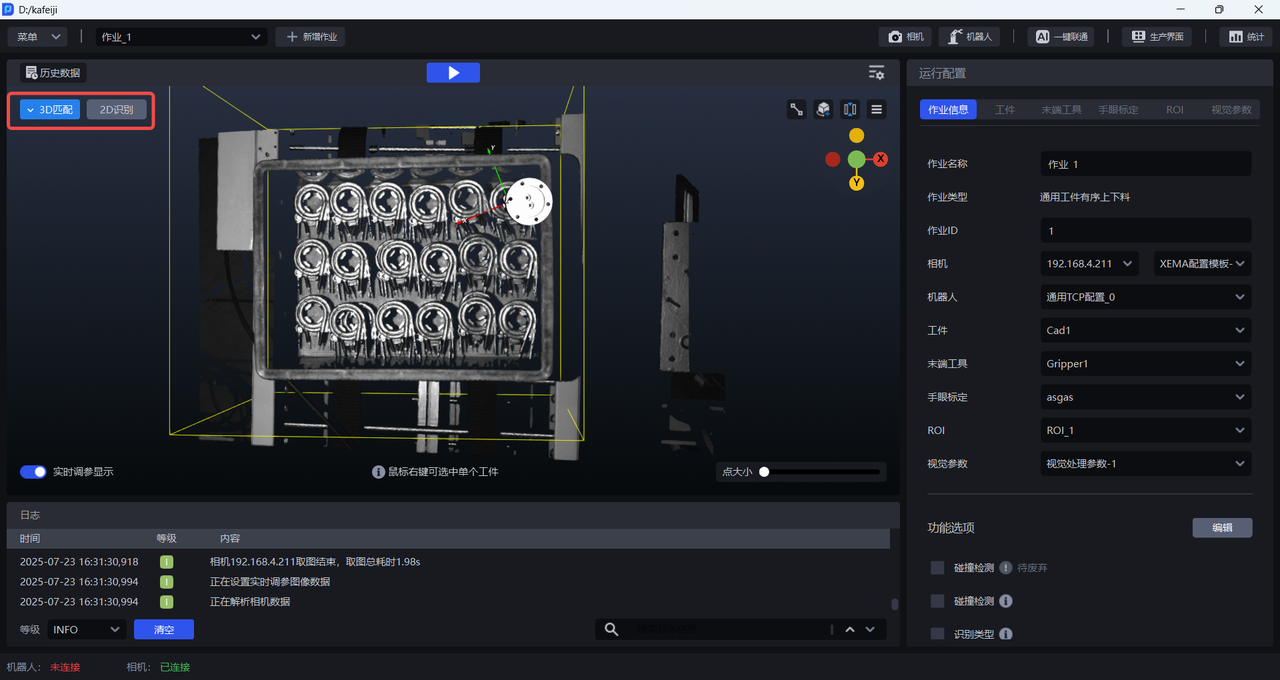
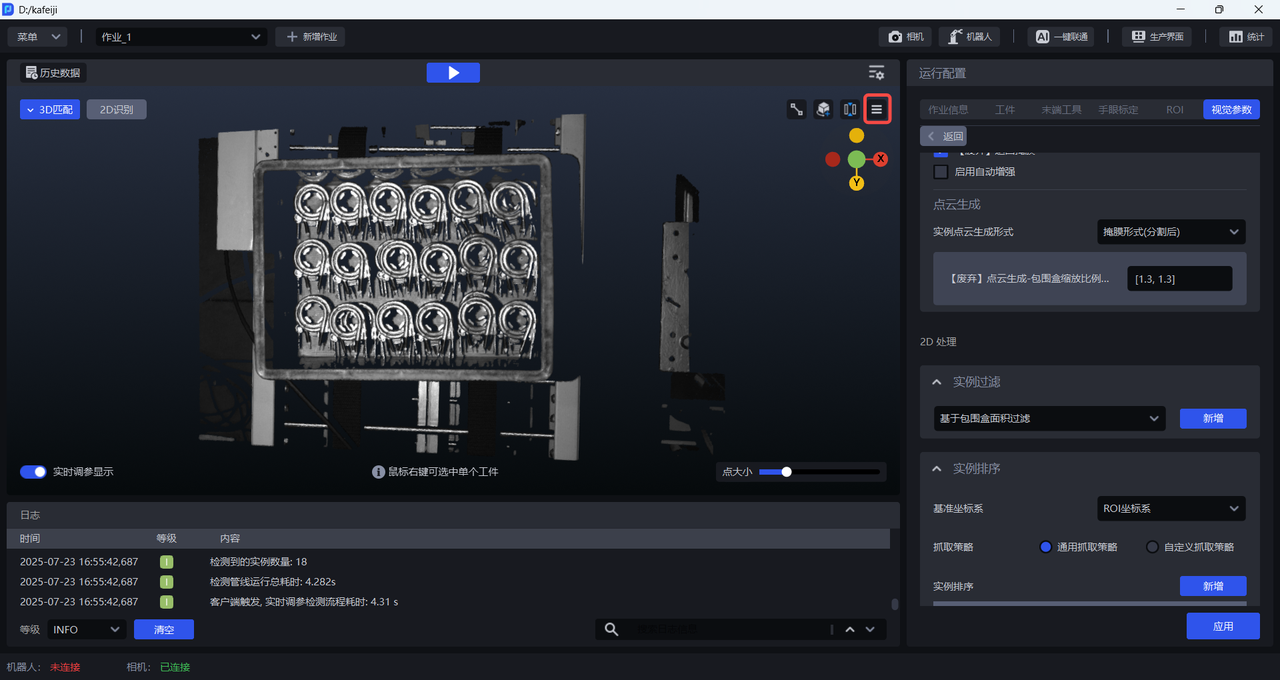
3. 可视化视窗
可视化视窗包含3D匹配和2D识别两个视窗。
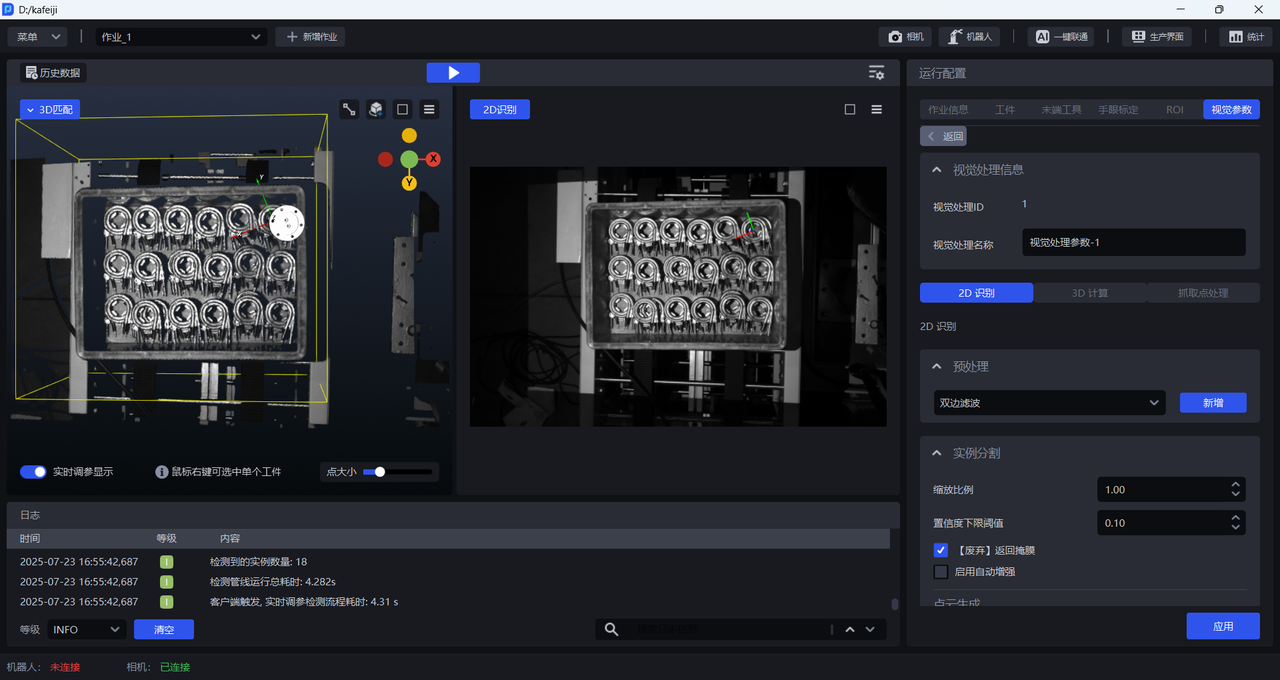
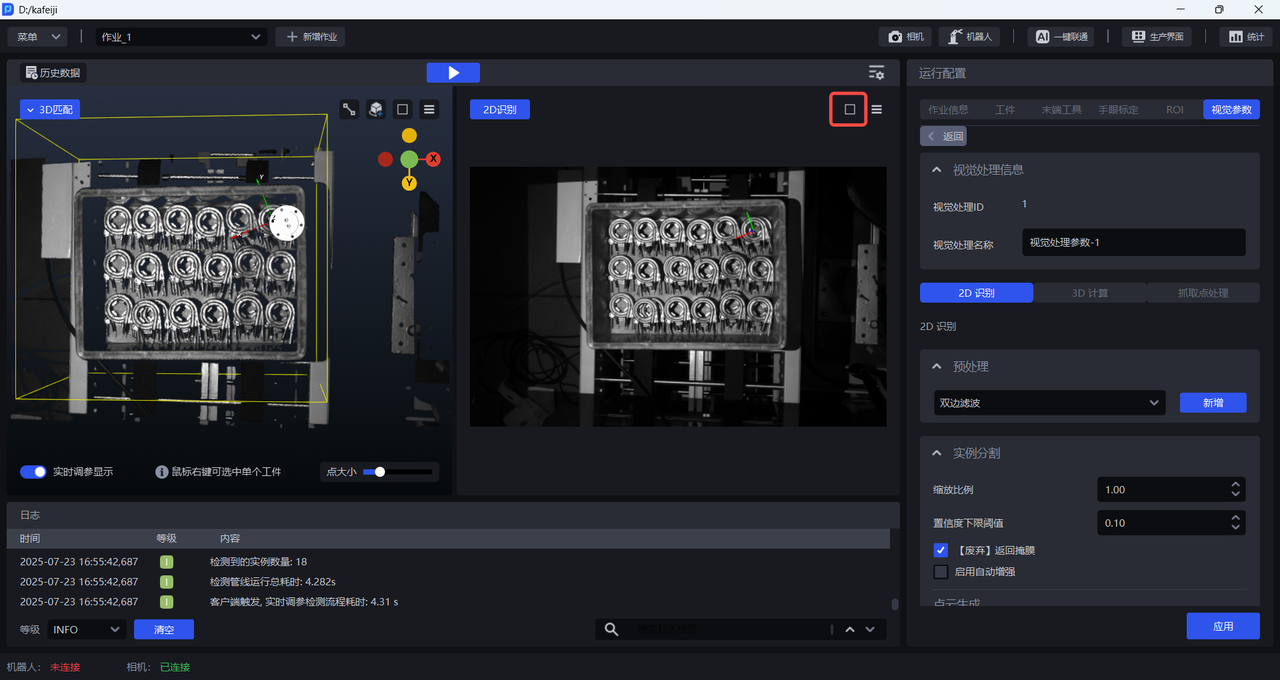
(1)视窗分割/合并
点击 视窗分割按钮 可将 视窗分割为3D匹配视窗和2D识别视窗,如下图所示。
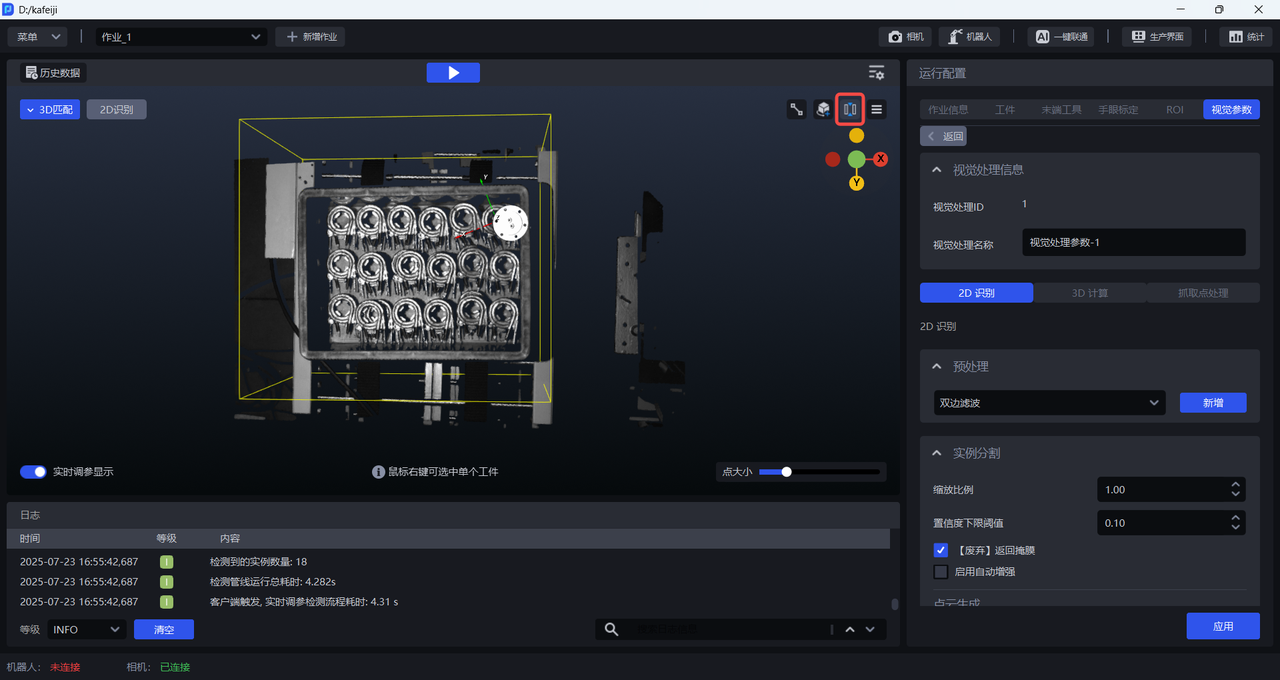
点击 视窗合并按钮 可将视窗合并,如下图所示。
(2)设置3D匹配视窗的背景颜色
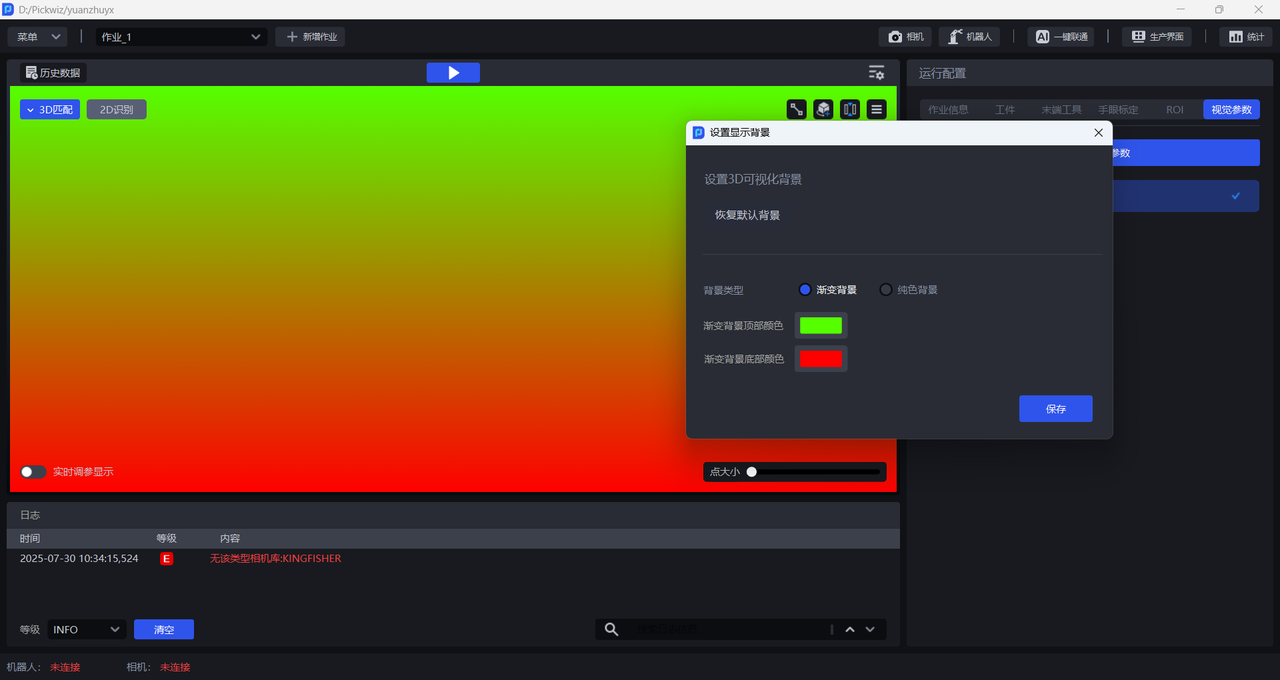
可修改3D匹配视窗的背景颜色,便于观察场景点云。默认的视窗颜色是深灰色,若场景点云的颜色较深,则难以观察场景点云,因此可修改视窗的背景颜色。
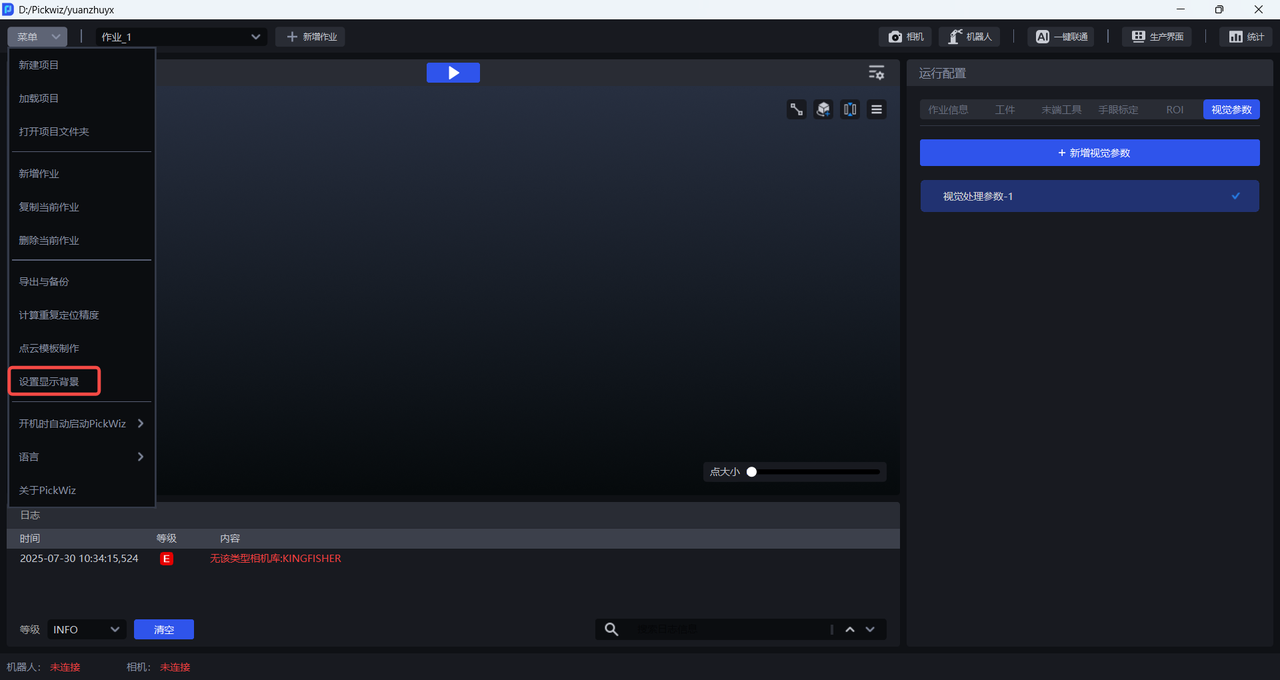
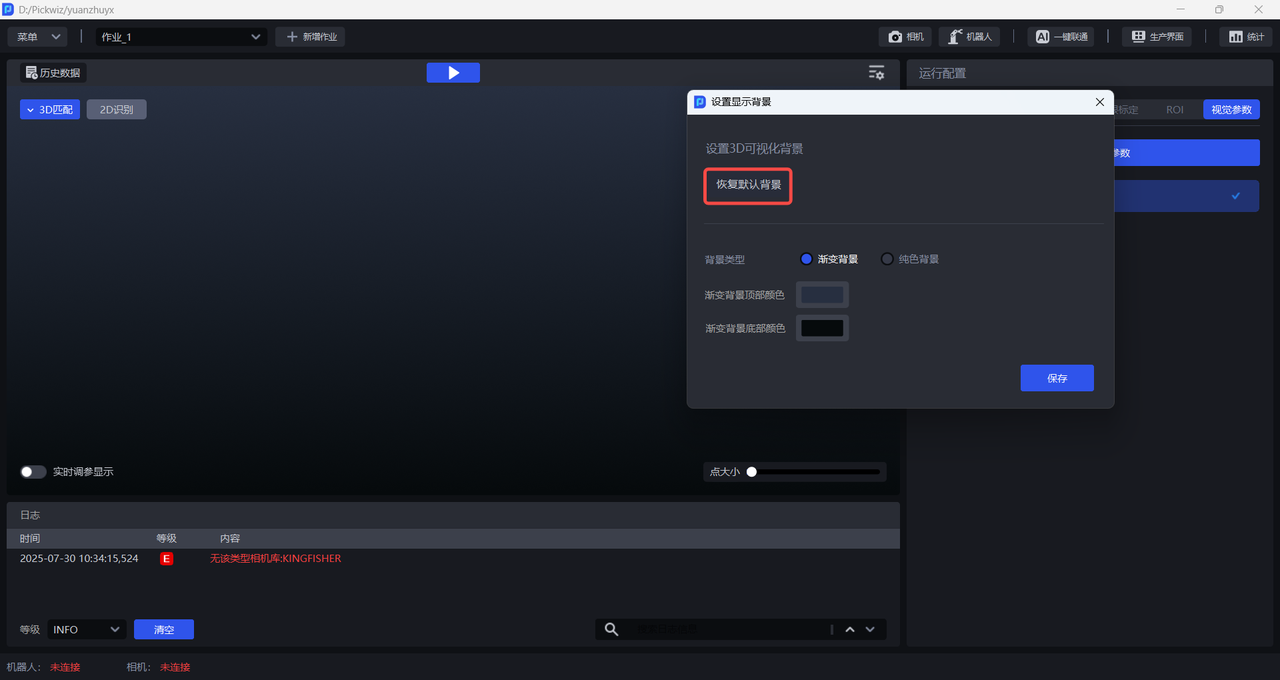
点击菜单>设置显示背景,出现设置显示背景弹窗,如下图所示。
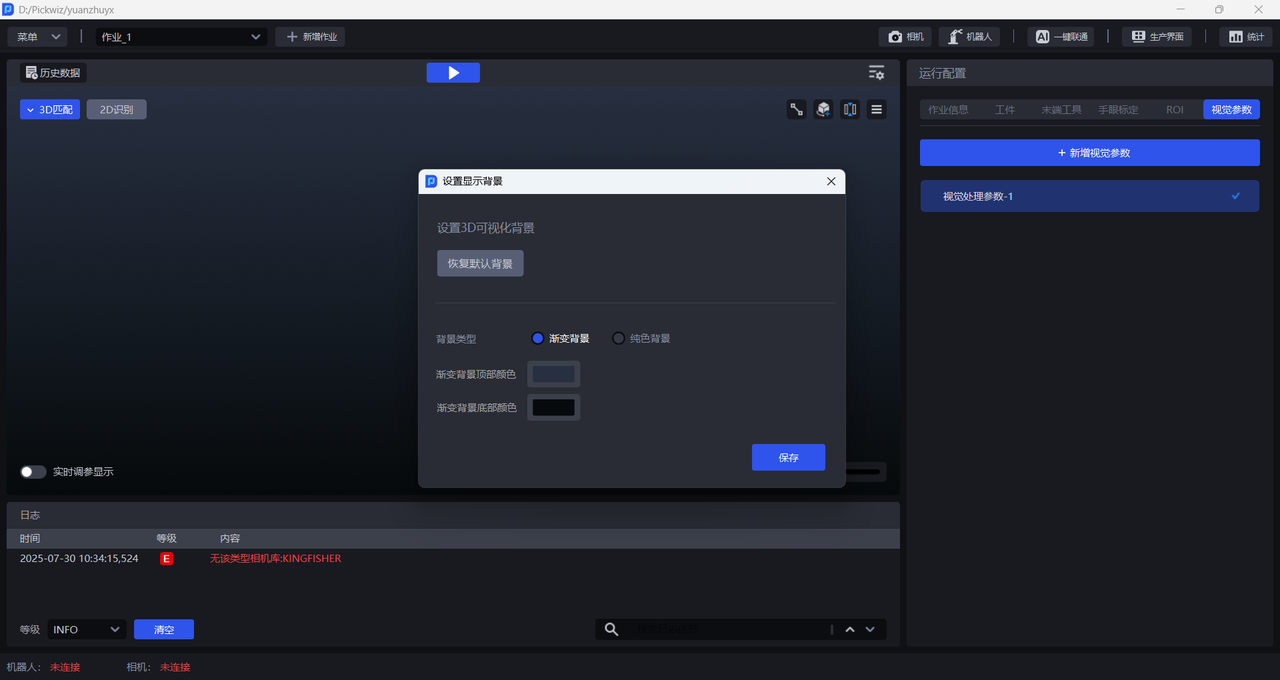
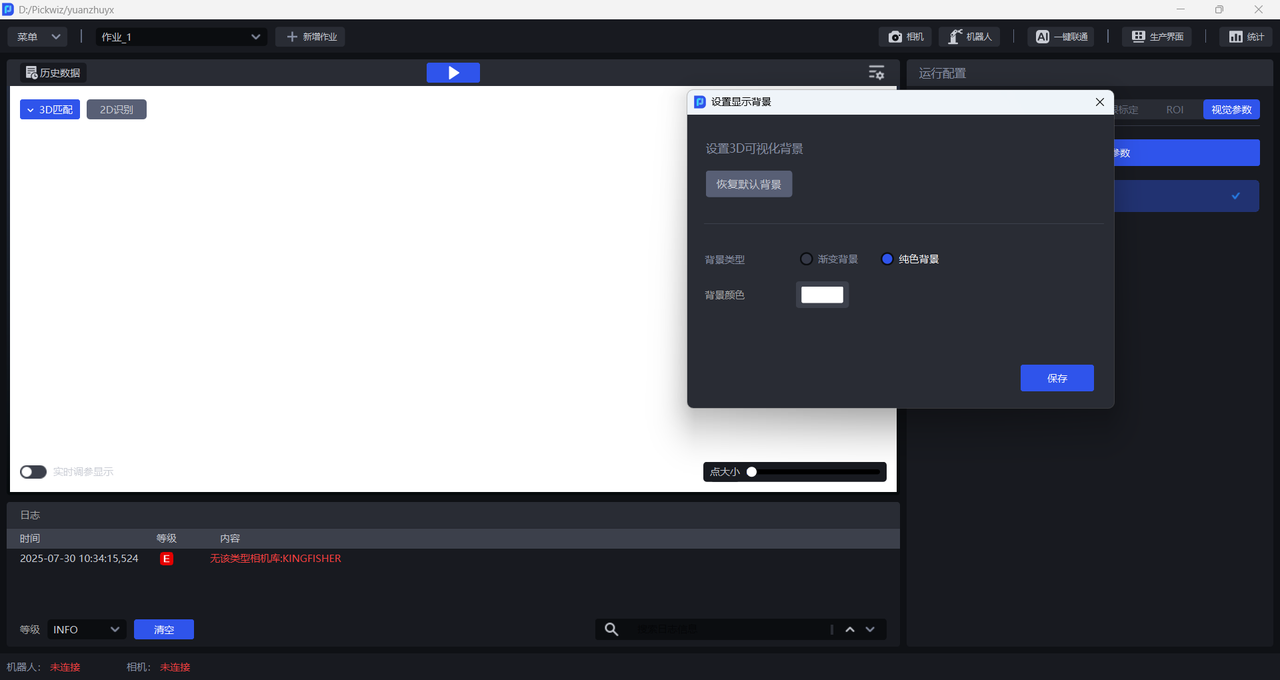
可将3D匹配视窗设置为纯色或渐变色背景,如下图所示。
点击恢复默认背景可将3D匹配视窗恢复到默认的深灰色,如下图所示。
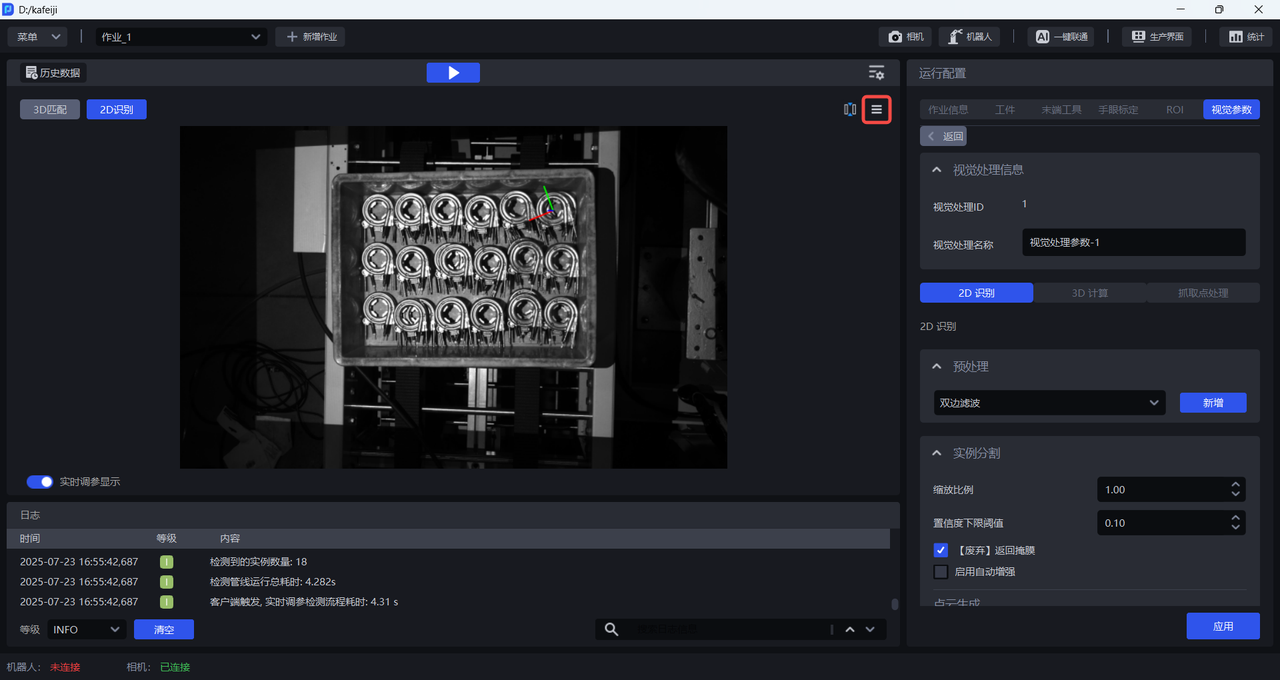
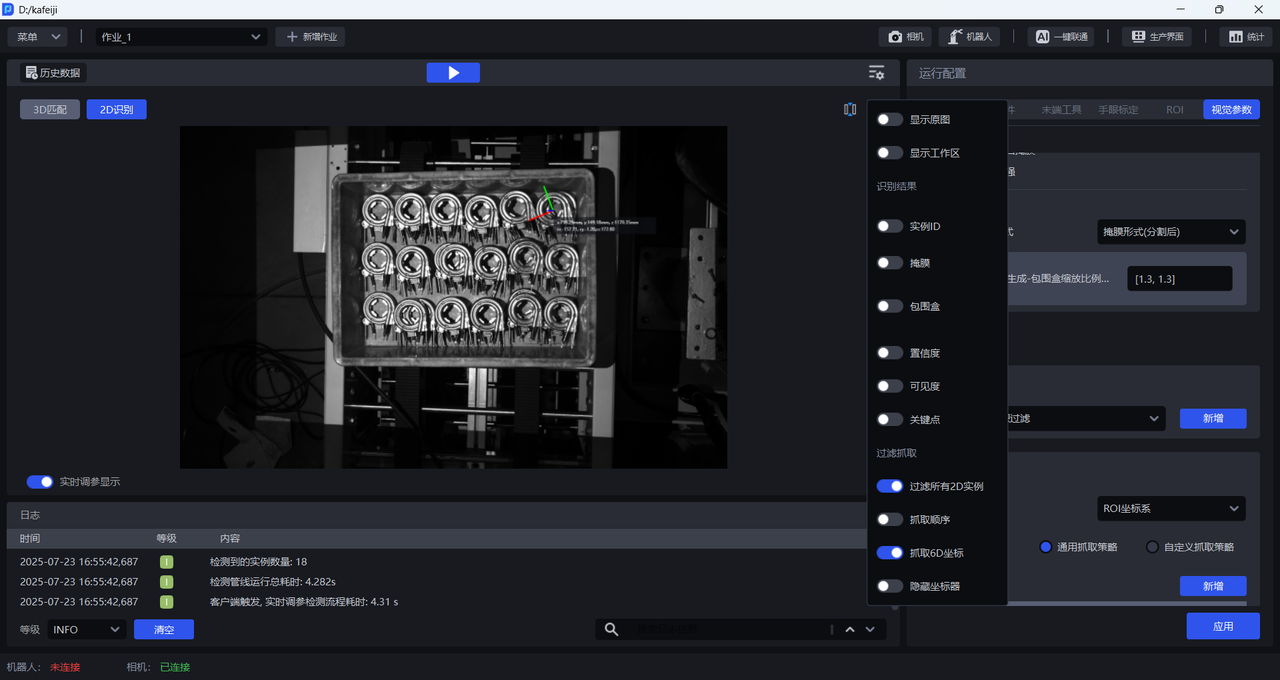
3.1 2D识别
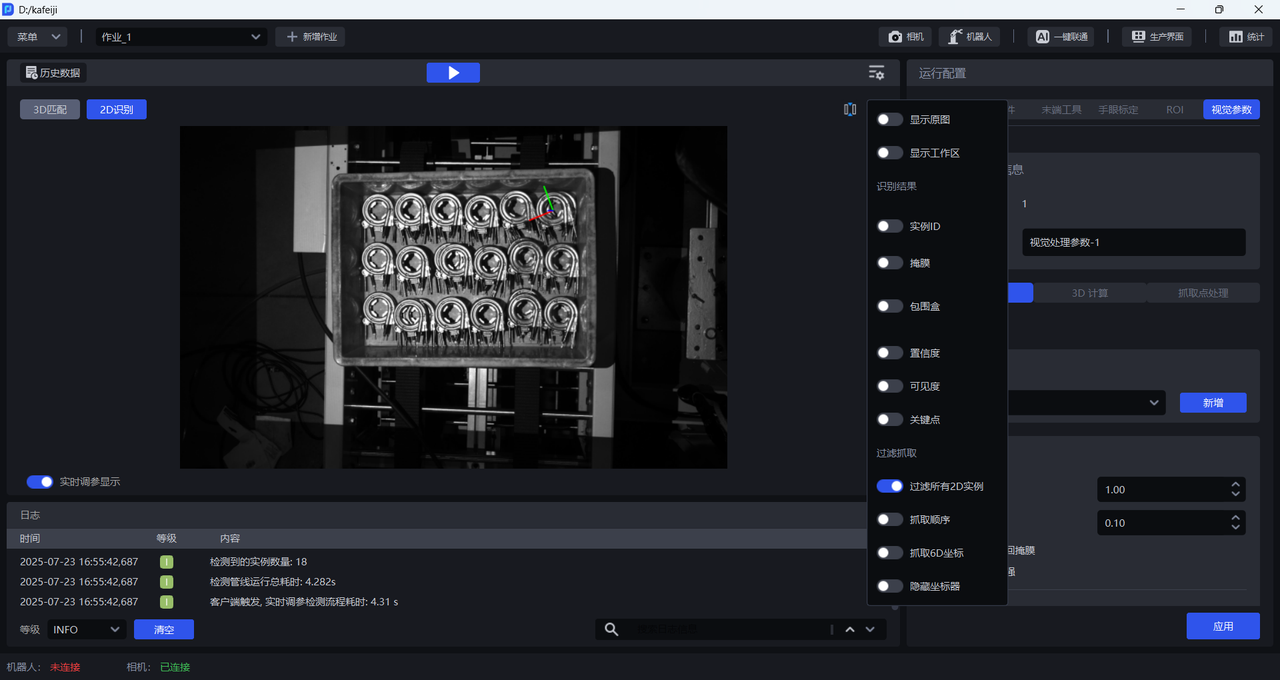
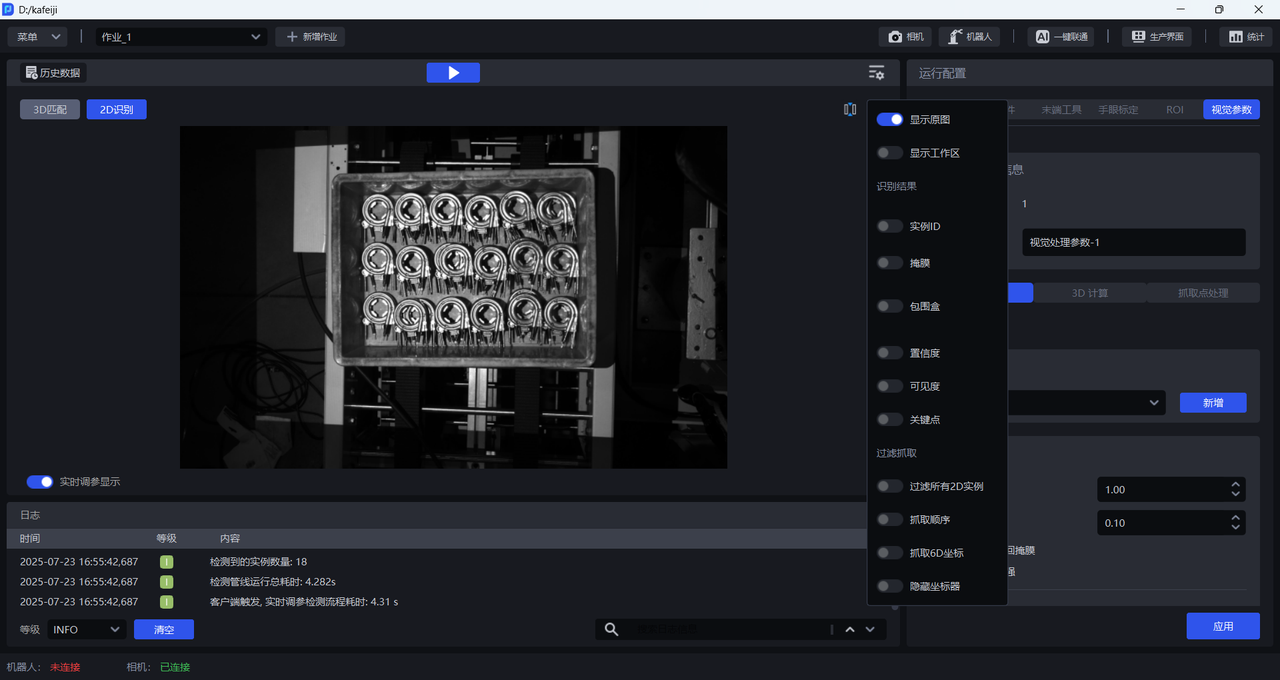
在2D识别视窗点击设置按钮,可自行选择显示的2D视觉结果,如下图所示。
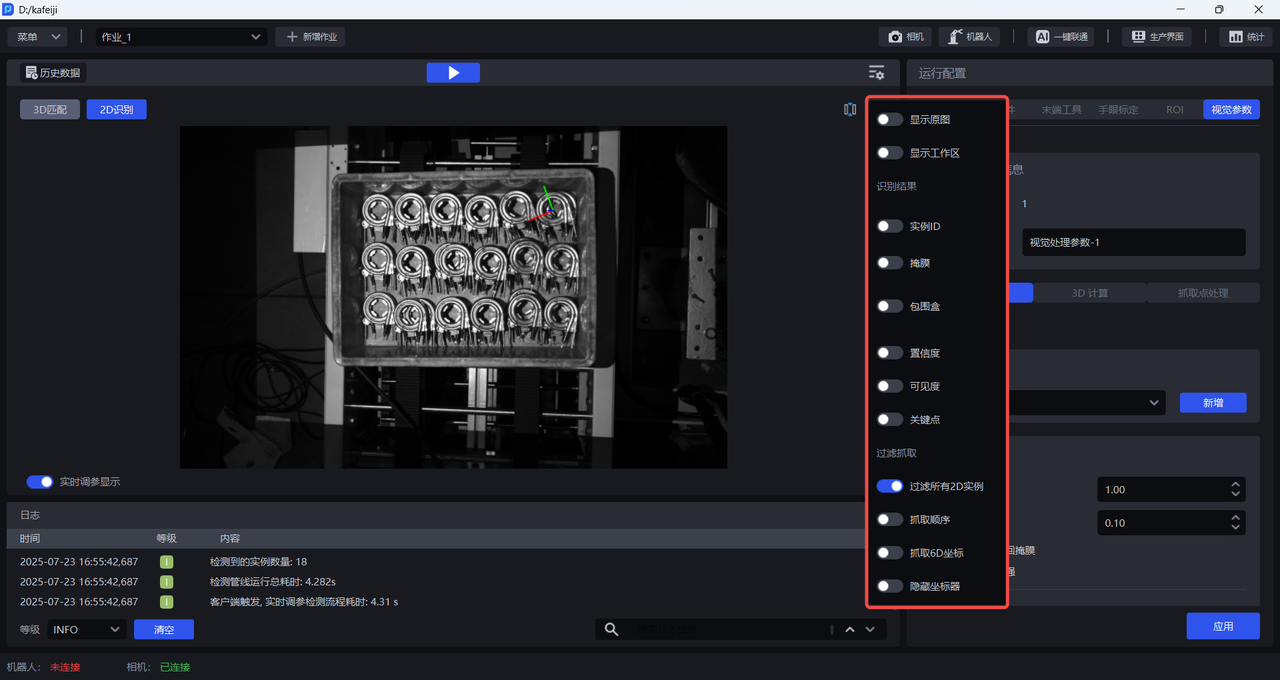
3.1.1 显示原图
开启显示原图,开启后仅显示相机采集的2D图像,不显示任何视觉结果,且其他设置项不能开启 。
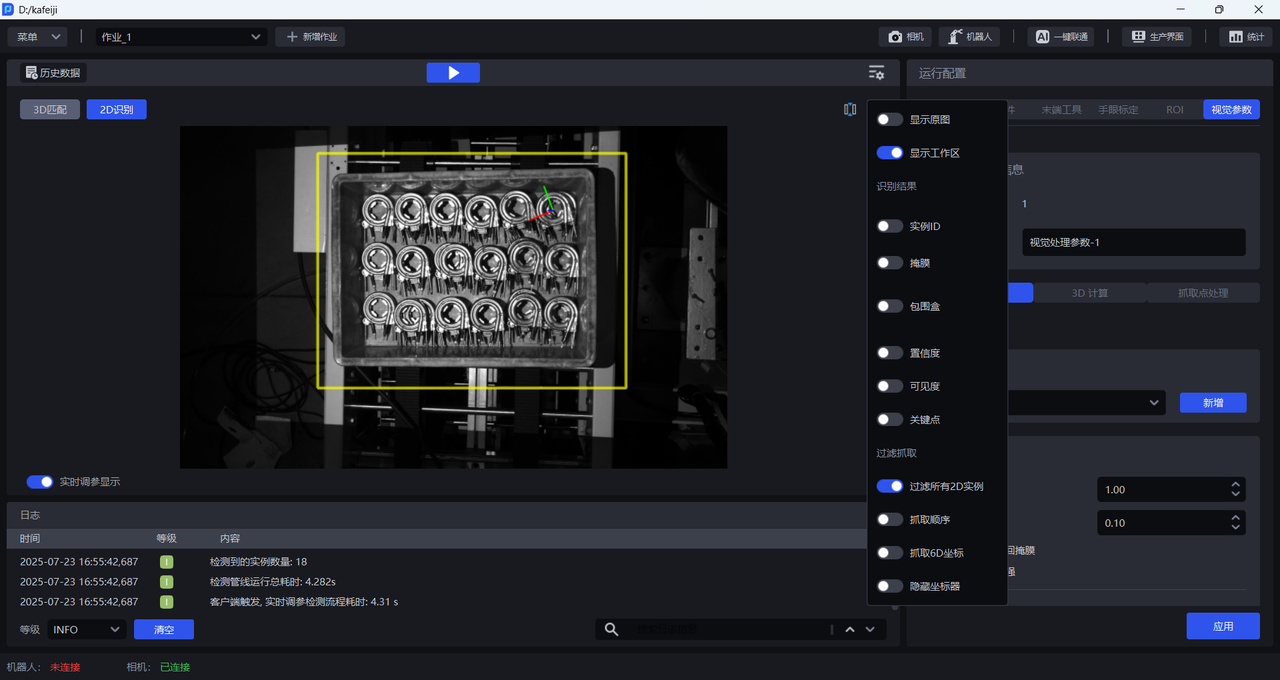
3.1.2 显示工作区
开启显示工作区,开启后仅显示 ROI 2D工作区,如下图所示。
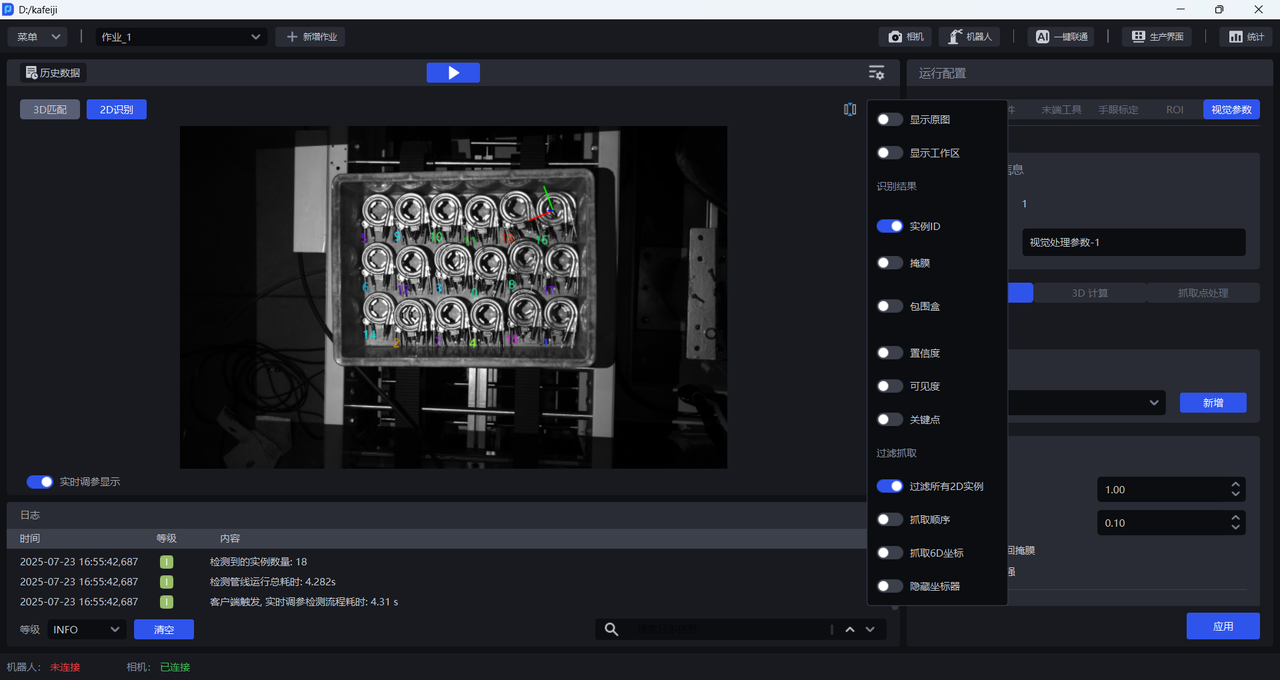
3.1.3 实例ID
开启实例ID,开启后显示识别出的工件实例的唯一标识,如下图所示。
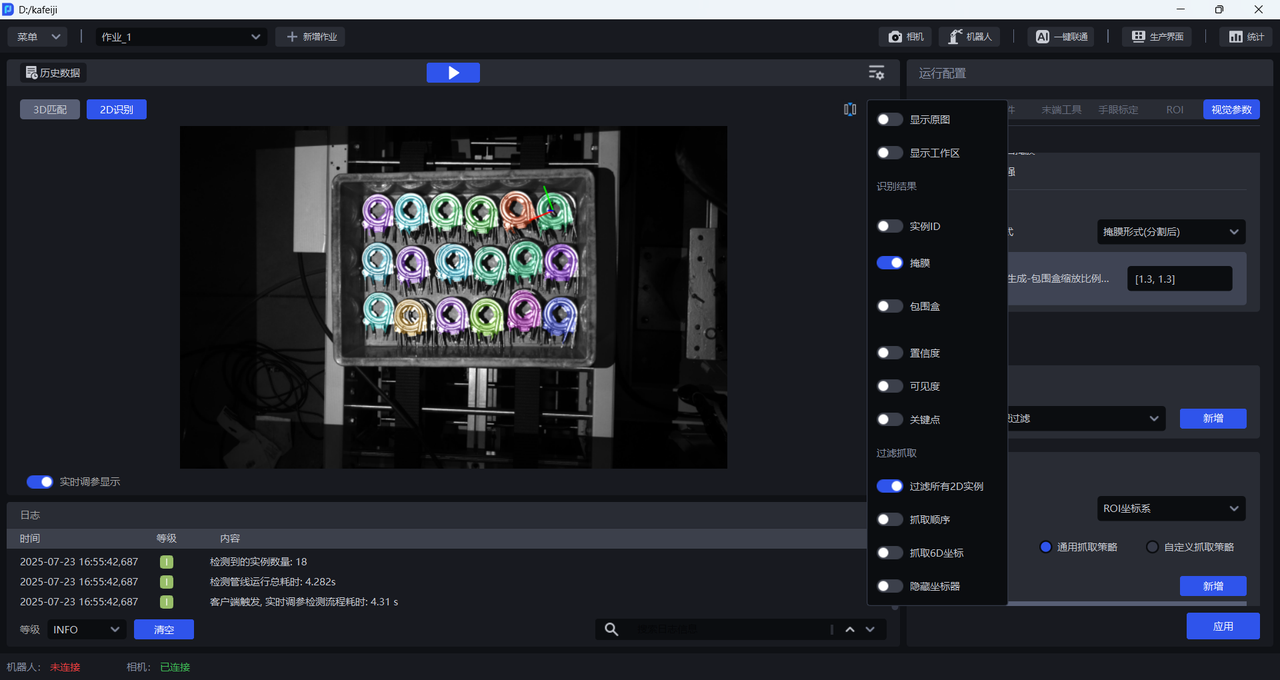
3.1.4 掩膜
开启掩膜,开启后显示识别出的工件实例的掩膜,如下图所示。
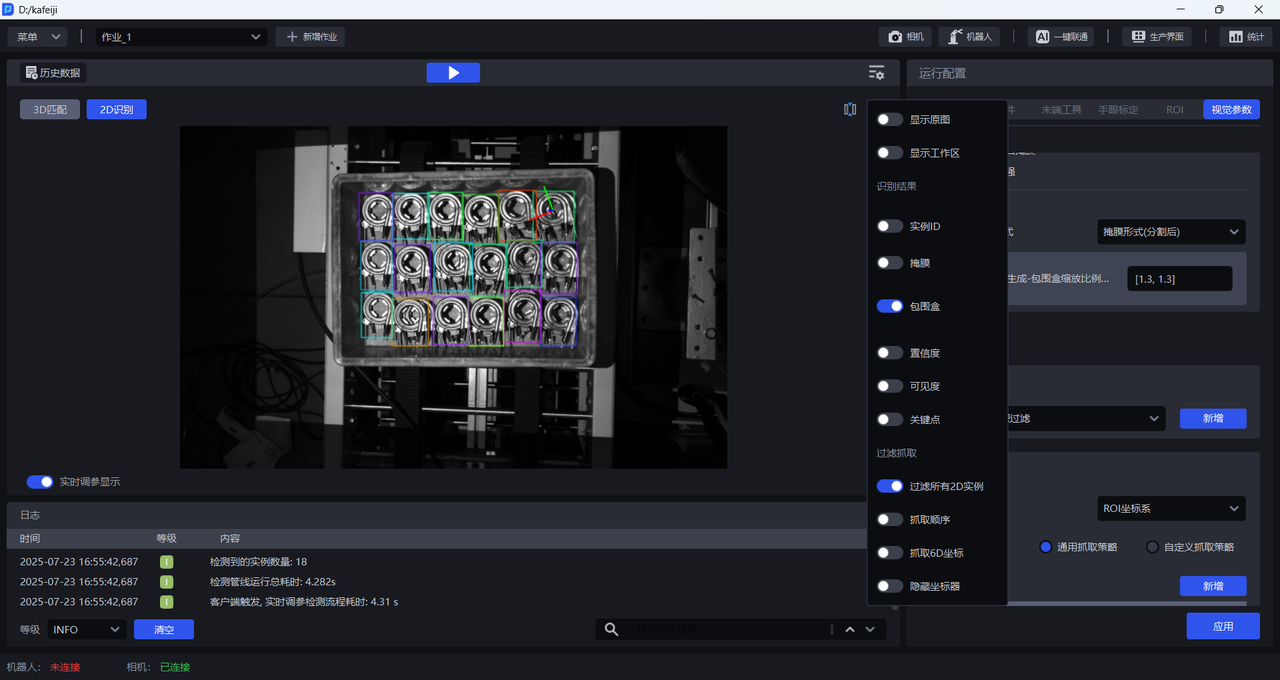
3.1.5 包围盒
开启包围盒,开启后显示识别出的工件实例的包围盒,如下图所示。
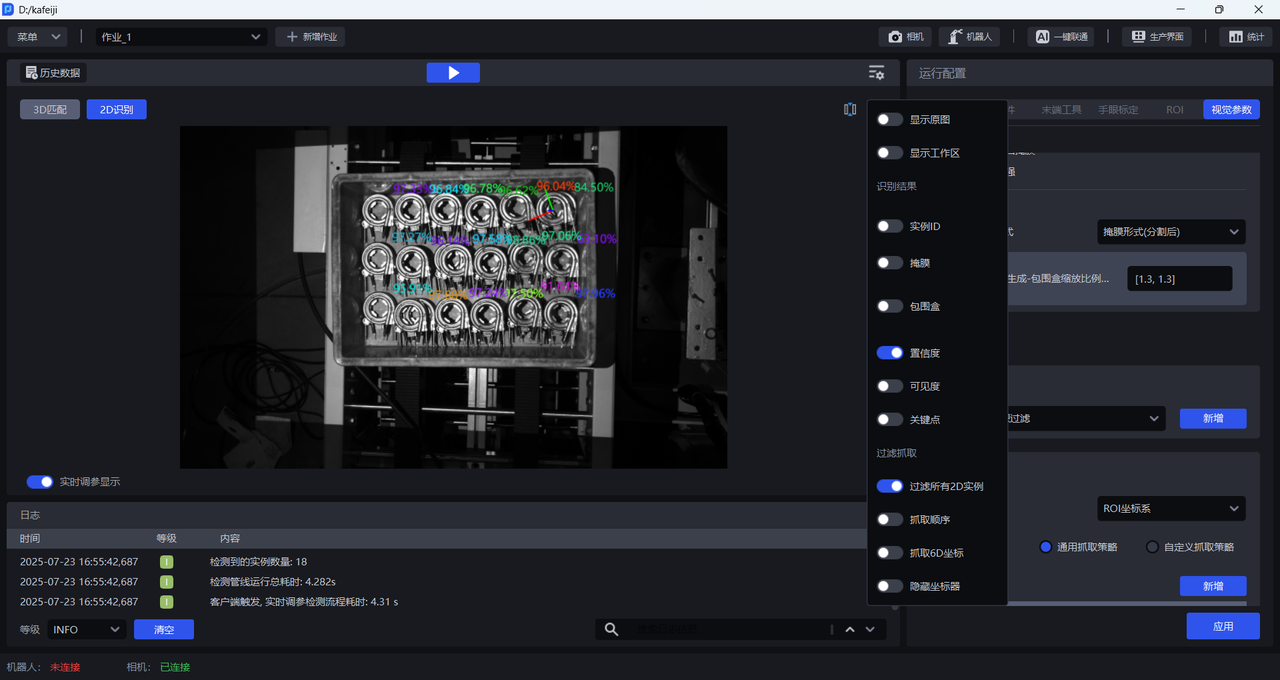
3.1.6 置信度
开启置信度,开启后显示识别出的工件实例的置信度,如下图所示。
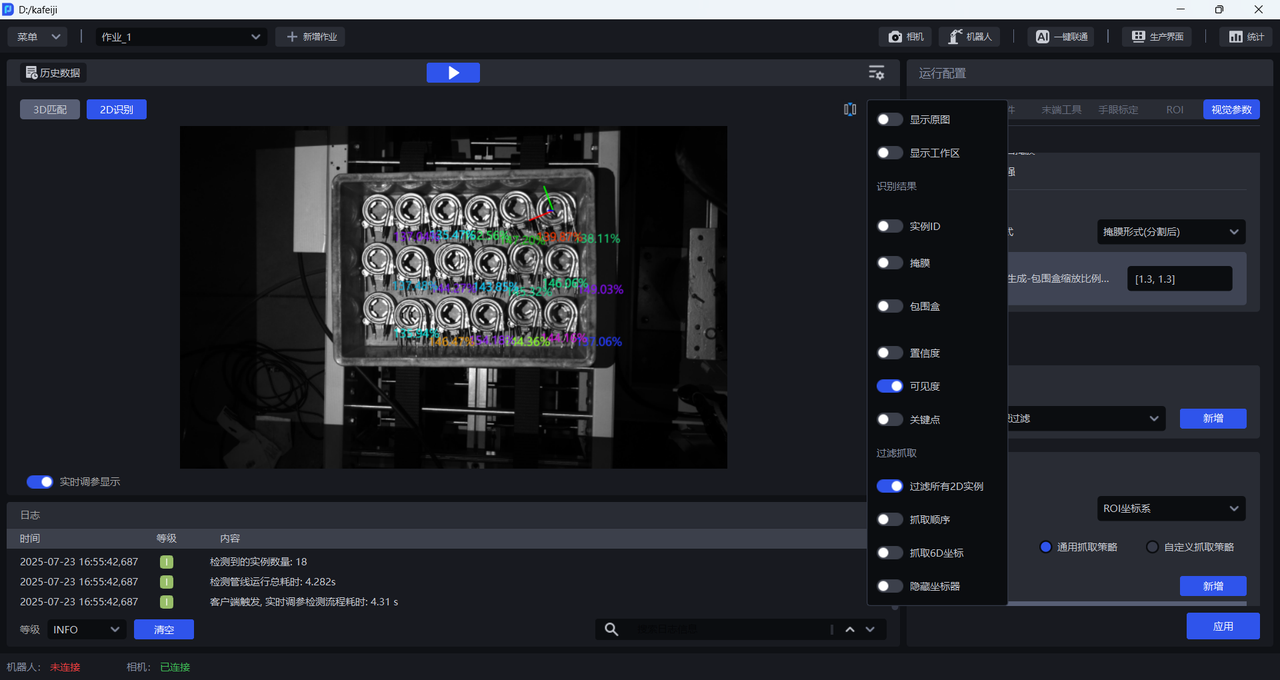
3.1.7 可见度
开启可见度,开启后显示识别出的工件实例的可见度,如下图所示。
3.1.8 关键点
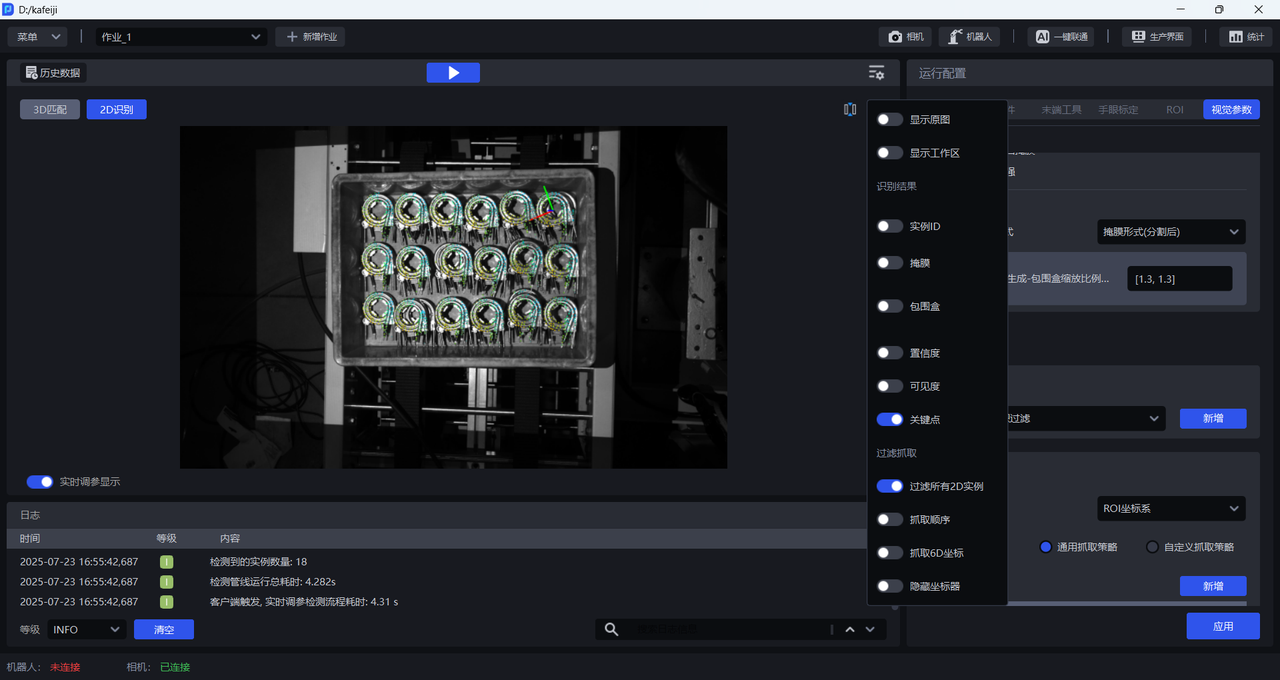
开启关键点,开启后显示识别出的工件实例的关键点,如下图所示。
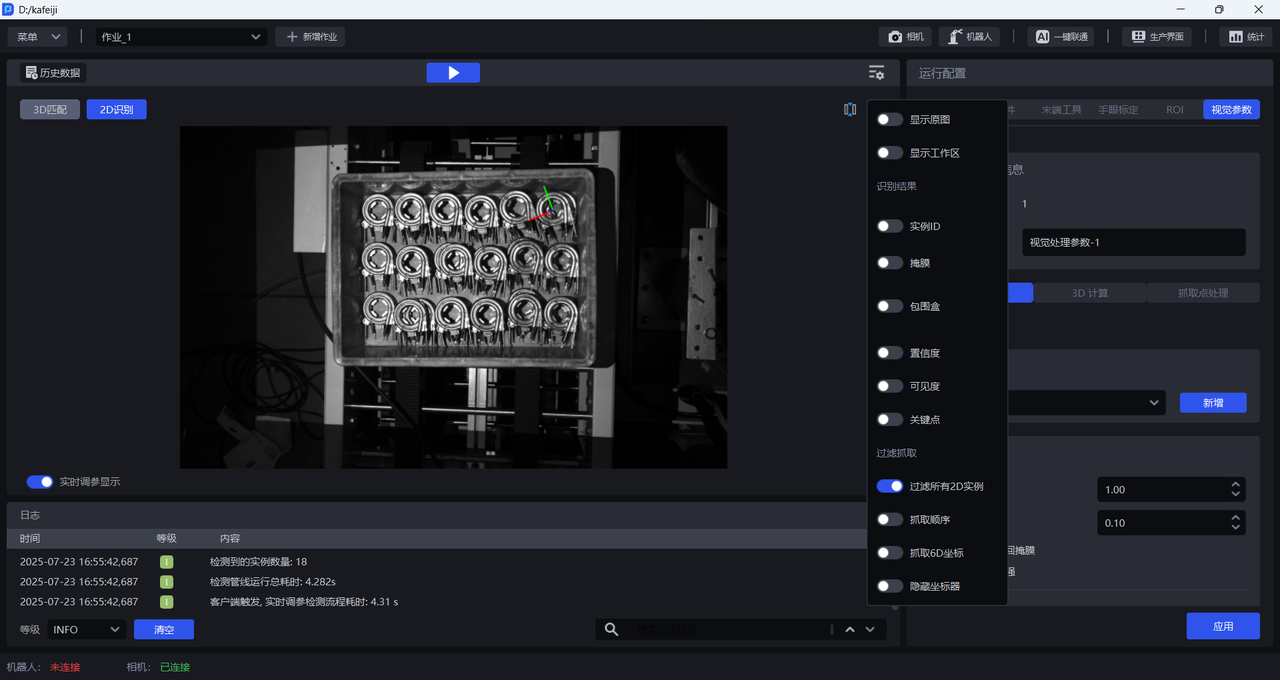
3.1.9 过滤所有2D实例
关闭后,显示实例分割节点识别出的实例;开启后,显示经过实例过滤节点过滤后的实例。
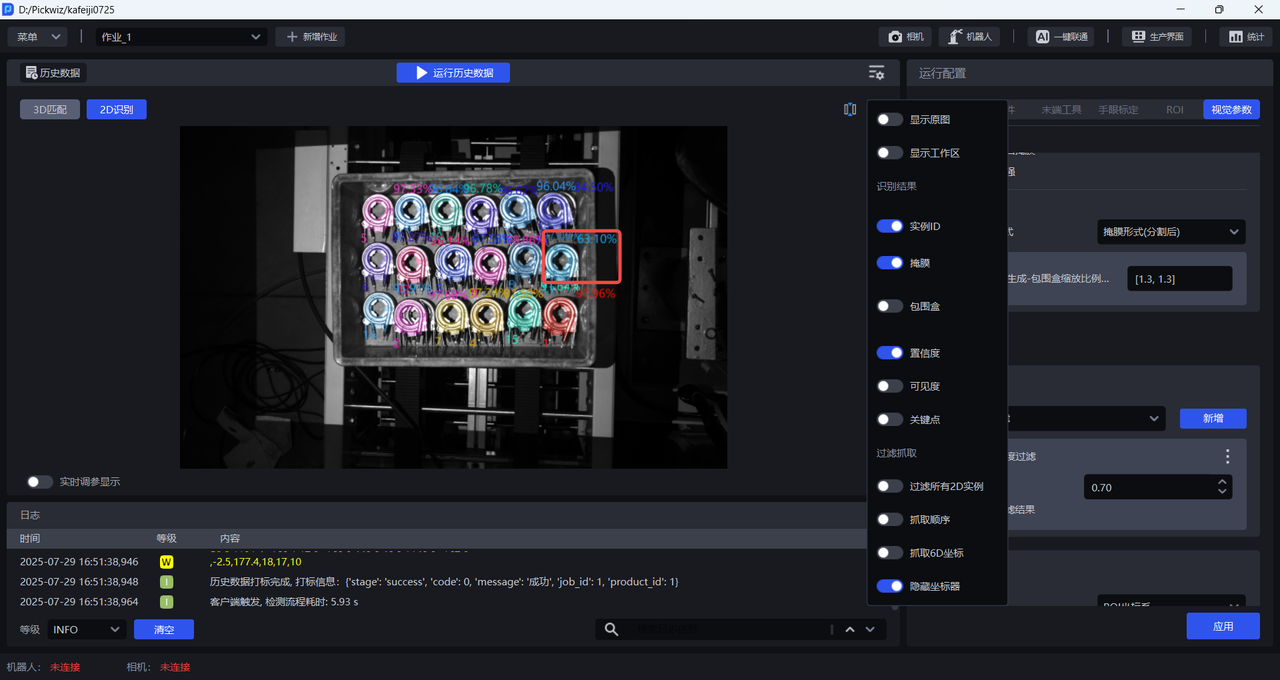
如下图所示,在实例过滤节点增加了基于置信度过滤函数,参考置信度设置为0.7,因此置信度小于70%的实例将被过滤。
关闭过滤所有2D实例时,下图红框的实例置信度为63.1%,没有被过滤。
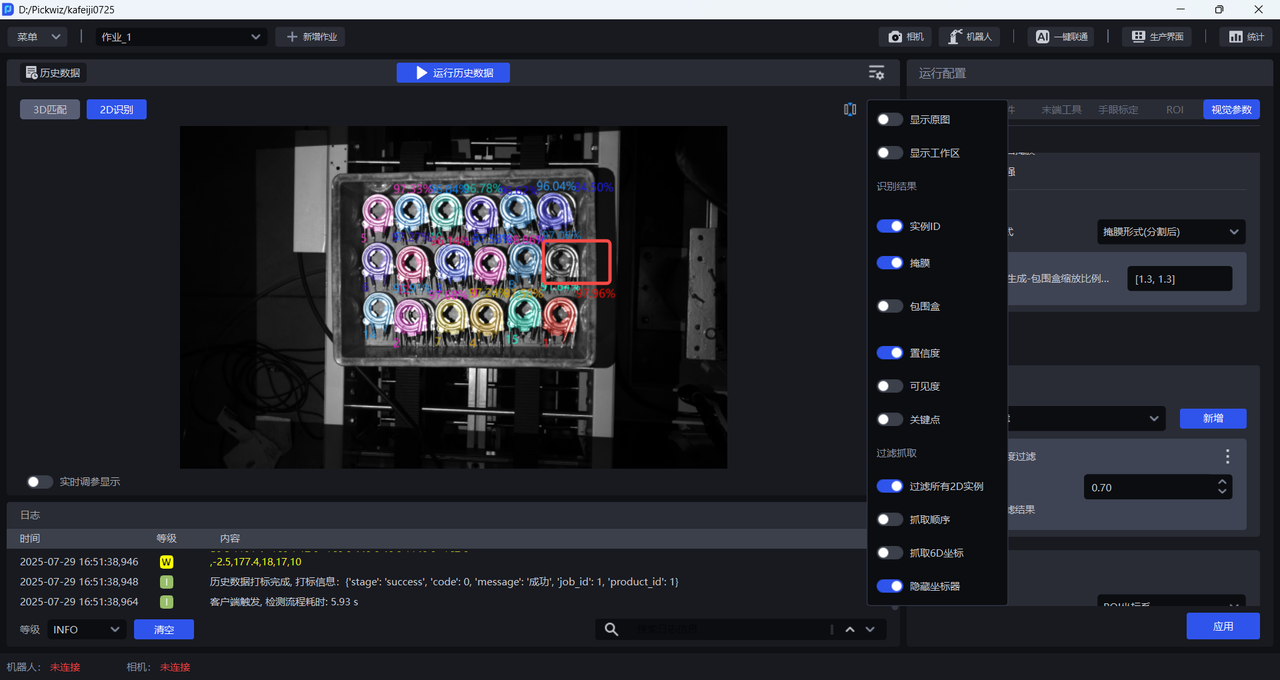
开启过滤所有2D实例时,红框的实例置信度为63.1%,将被过滤。
3.1.10 抓取顺序
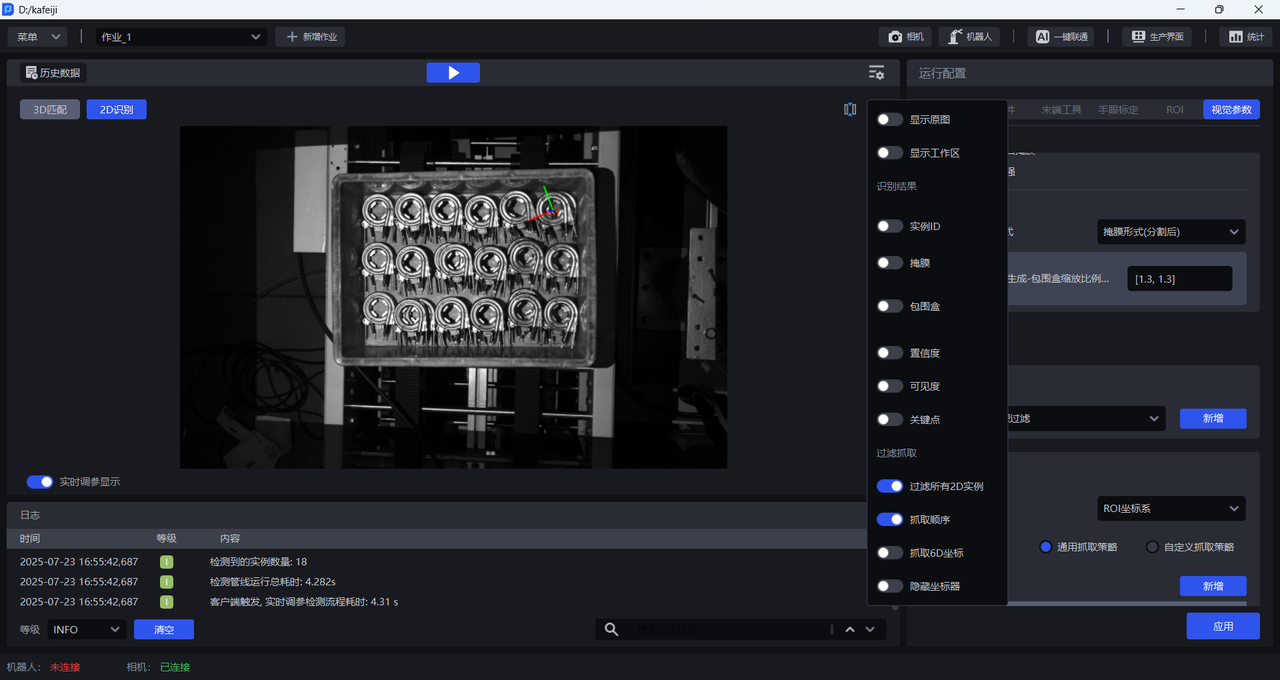
开启抓取顺序,开启后显示识别出的工件实例的抓取顺序,如下图所示。
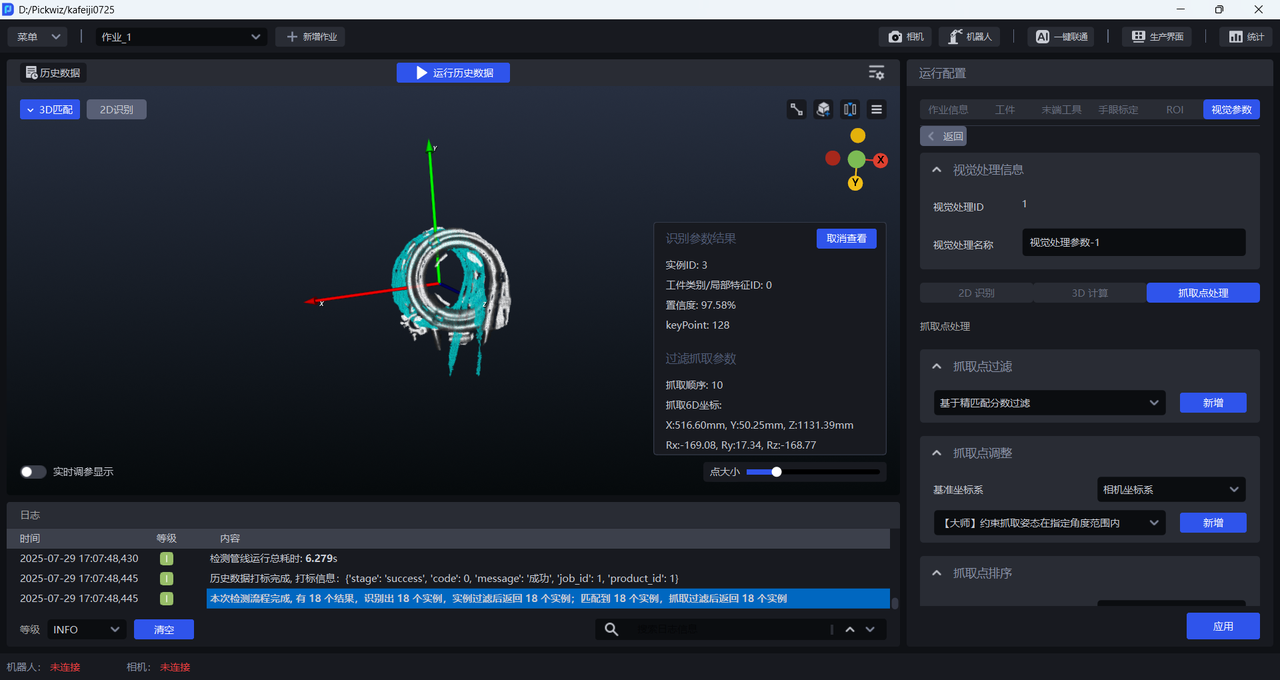
3.1.11 抓取6D坐标
开启抓取6D坐标,开启后显示识别出的工件实例的抓取位姿(即6D坐标),如下图所示。
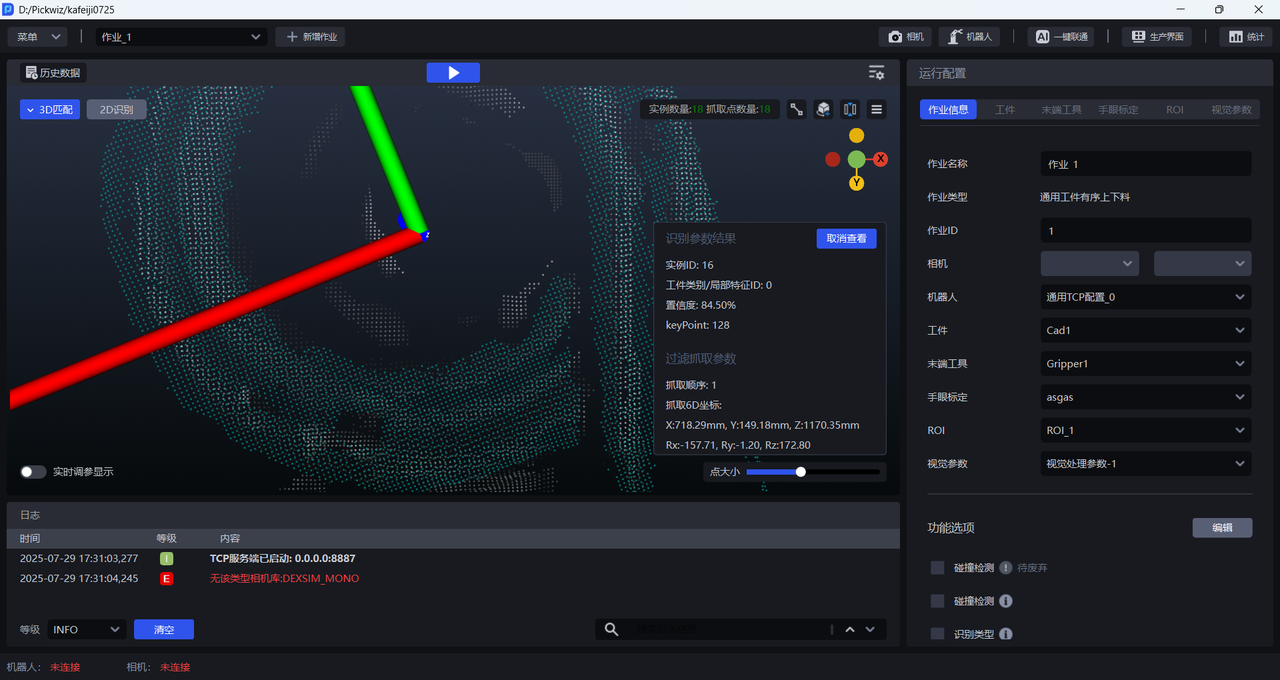
鼠标左键点击2D识别视窗的空白处可关闭设置框,然后将光标放在2D识别视窗,向上滑动鼠标滚轮可放大2D图像查看抓取点的6D坐标。
3.1.12 隐藏坐标器
开启隐藏坐标器,开启后隐藏抓取点的坐标器;关闭时,显示抓取点的坐标器。
3.2 3D匹配
在3D匹配视窗点击设置按钮,可自行选择显示的3D视觉结果,如下图所示。
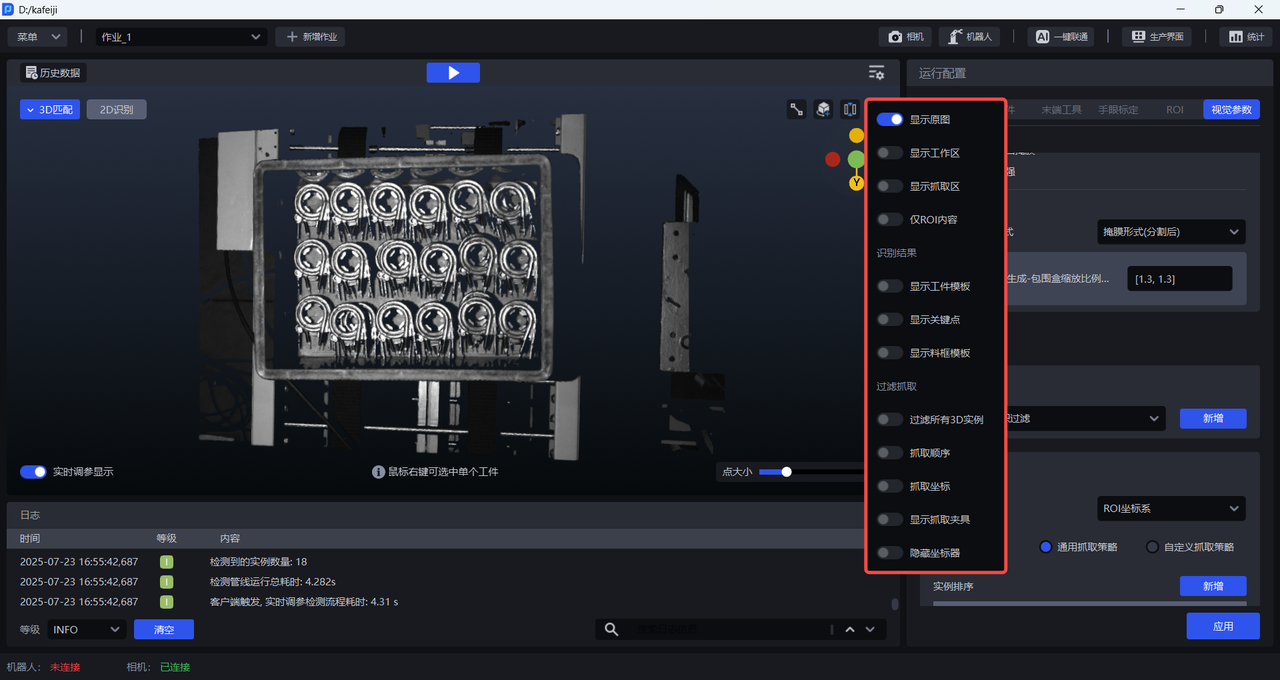
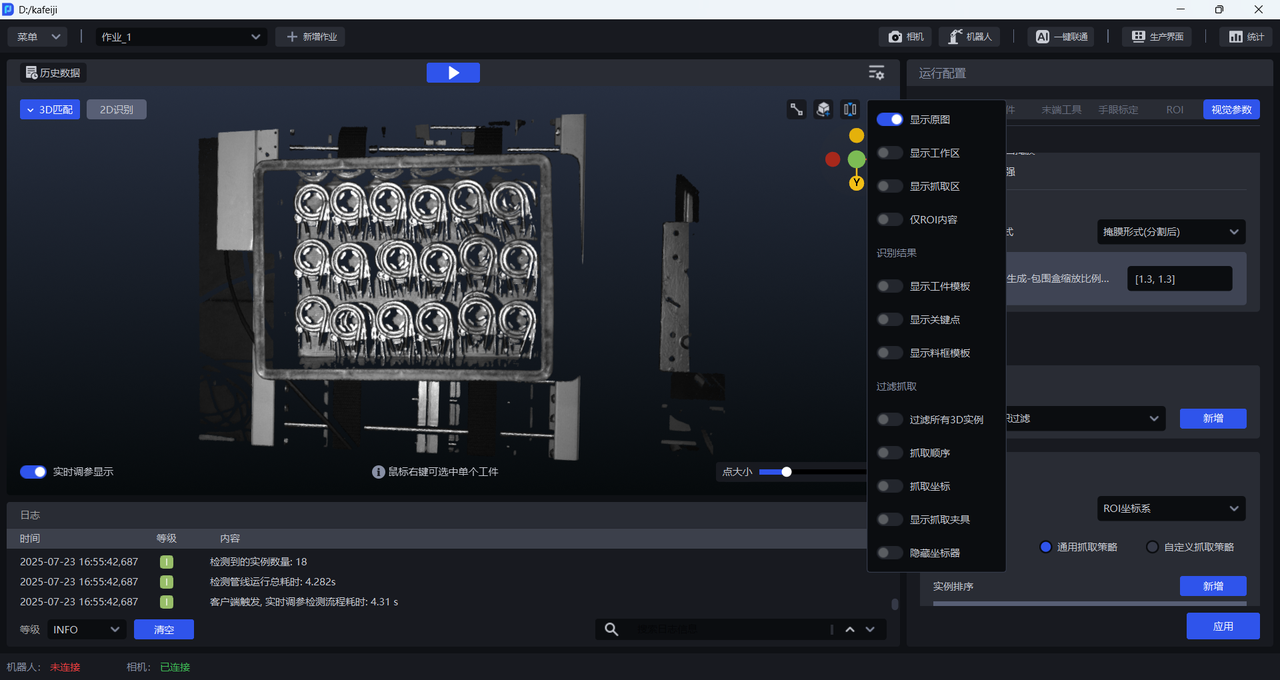
3.2.1 显示原图
开启显示原图,开启后仅显示3D点云,不显示任何视觉结果,且其他设置项不能开启,如下图所示 。
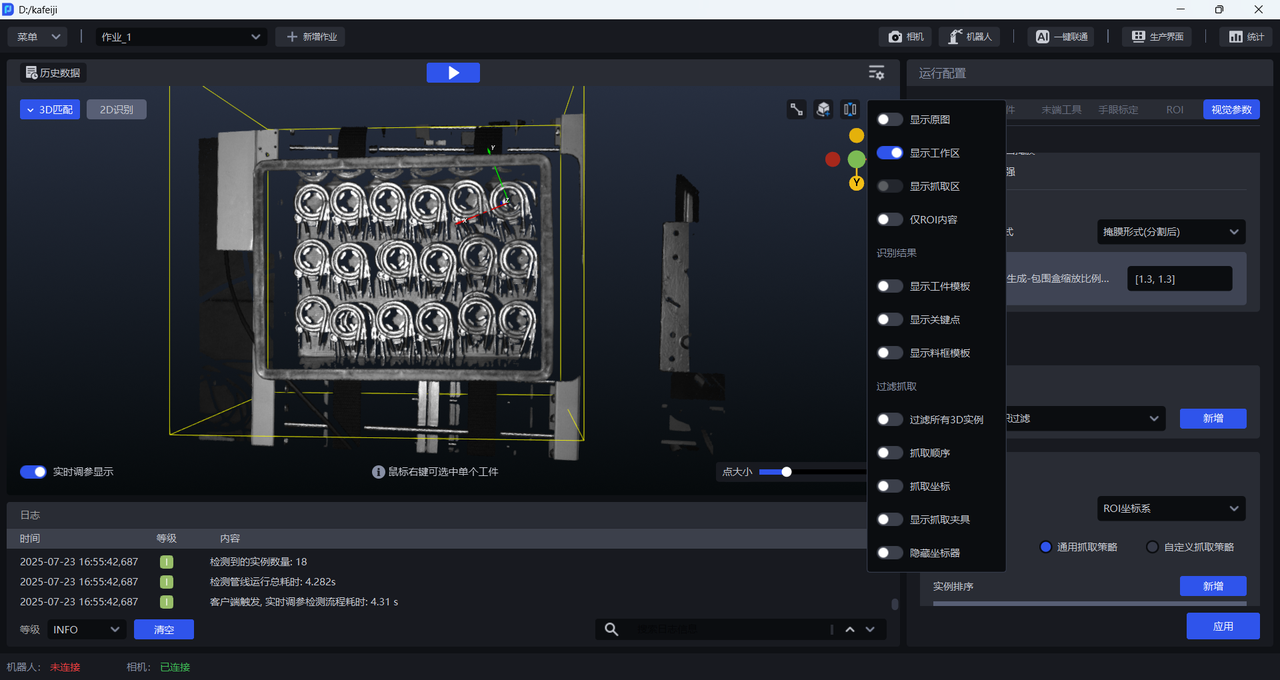
3.2.2 显示工作区
开启显示工作区,开启后仅显示 ROI 3D工作区,且显示抓取区不可开启,如下图所示。

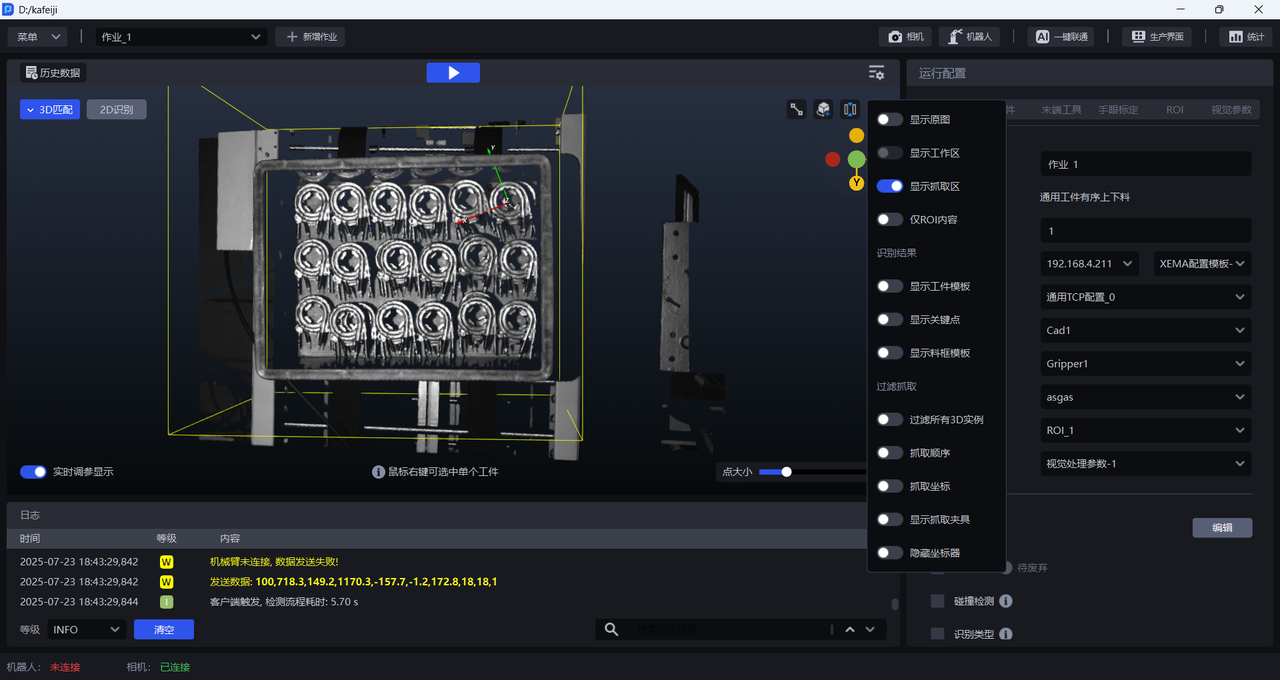
3.2.3 显示抓取区
开启显示抓取区,开启后仅显示 ROI 3D抓取区,且显示工作区不可开启,如下图所示。
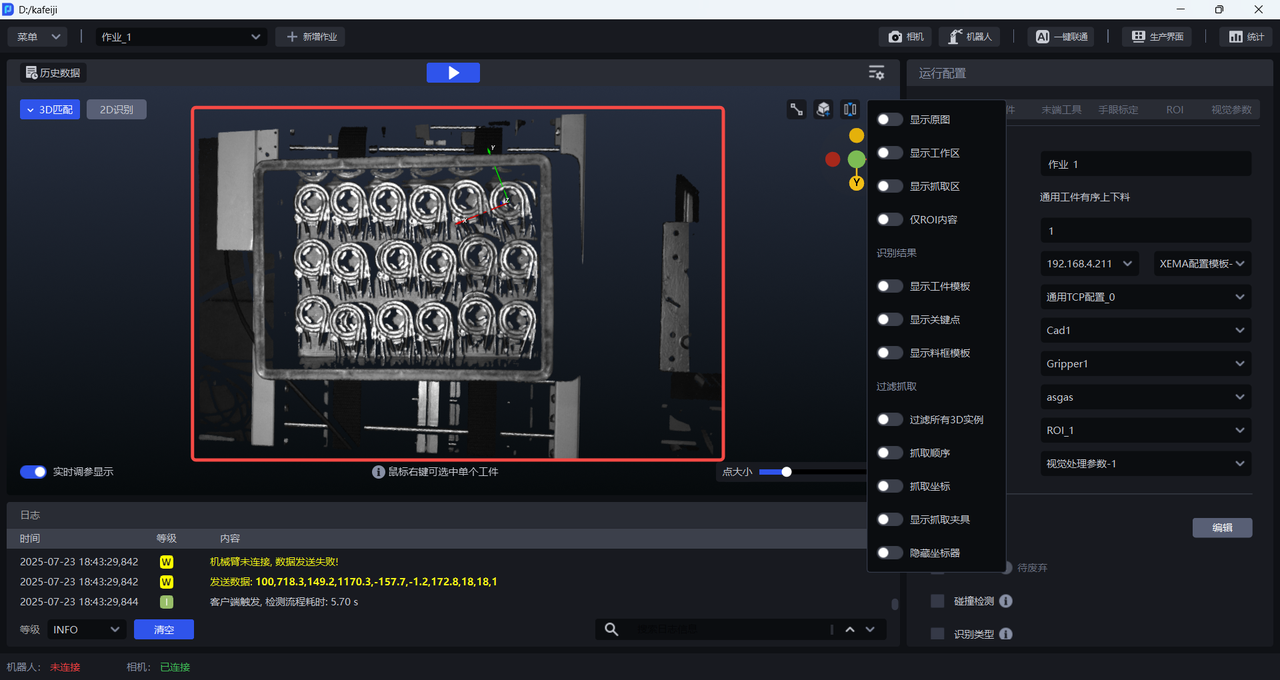
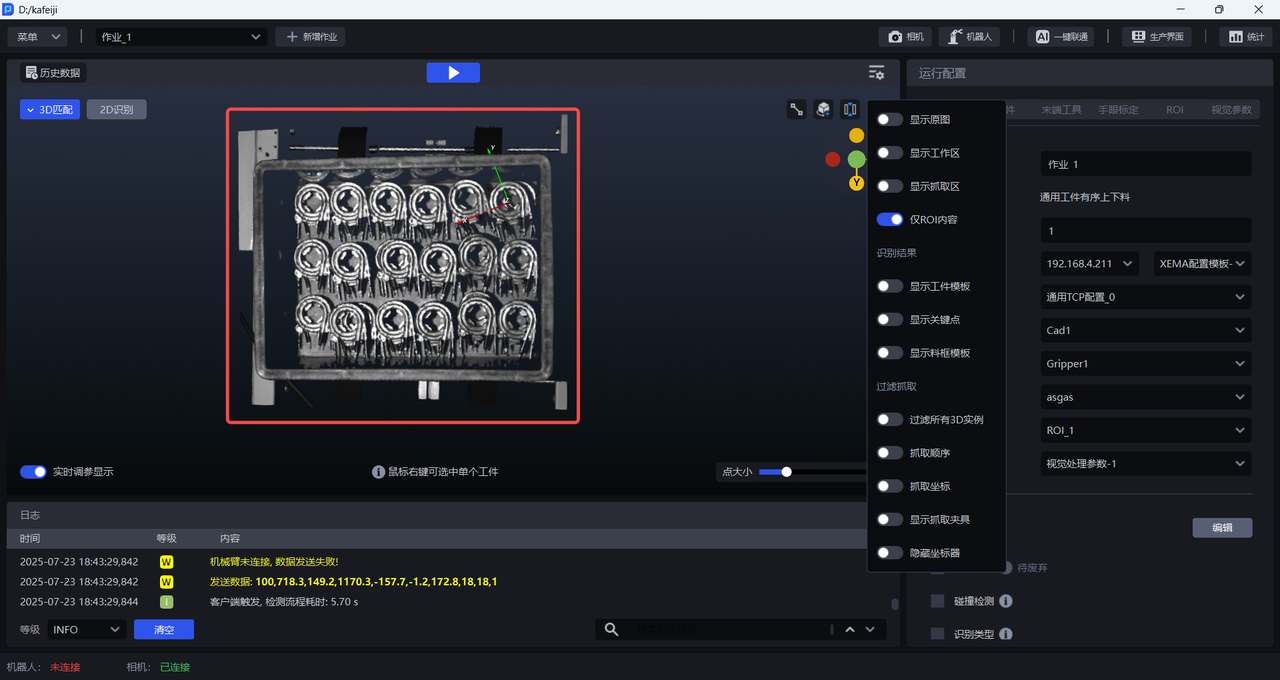
3.2.4 仅ROI内容
开启仅ROI内容,开启后仅显示 ROI 3D区域内的部分,ROI区域外的部分会变黑,如下图所示。
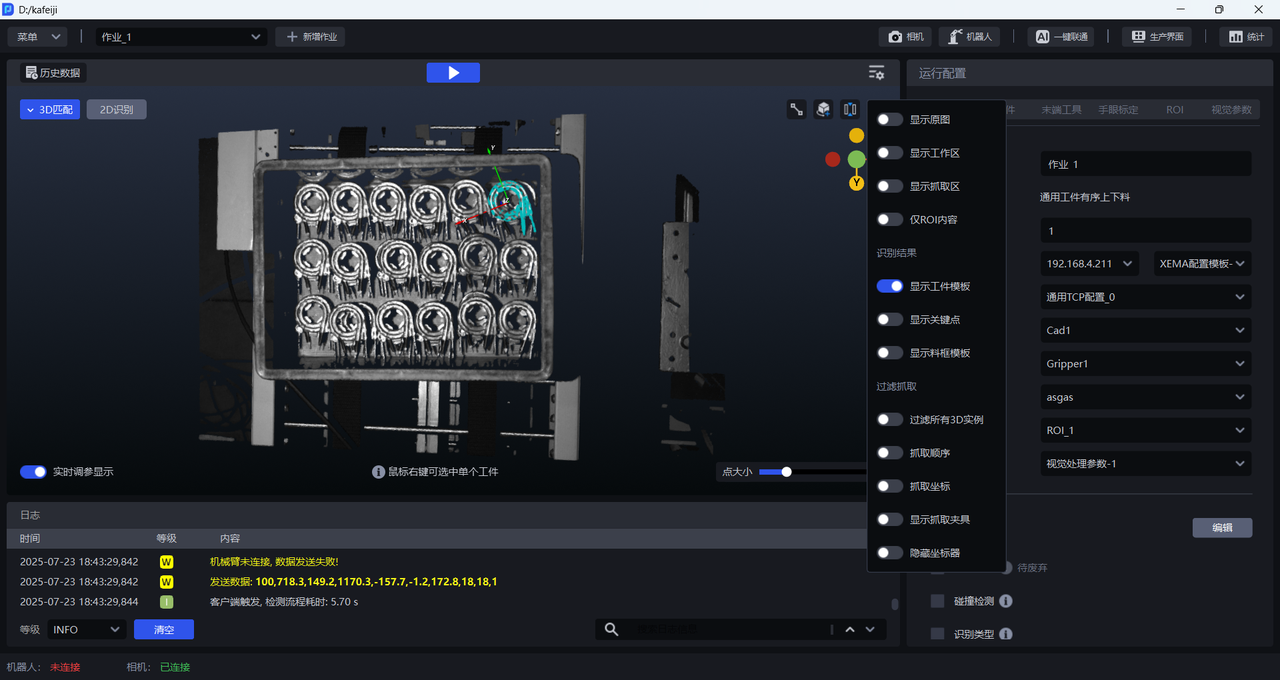
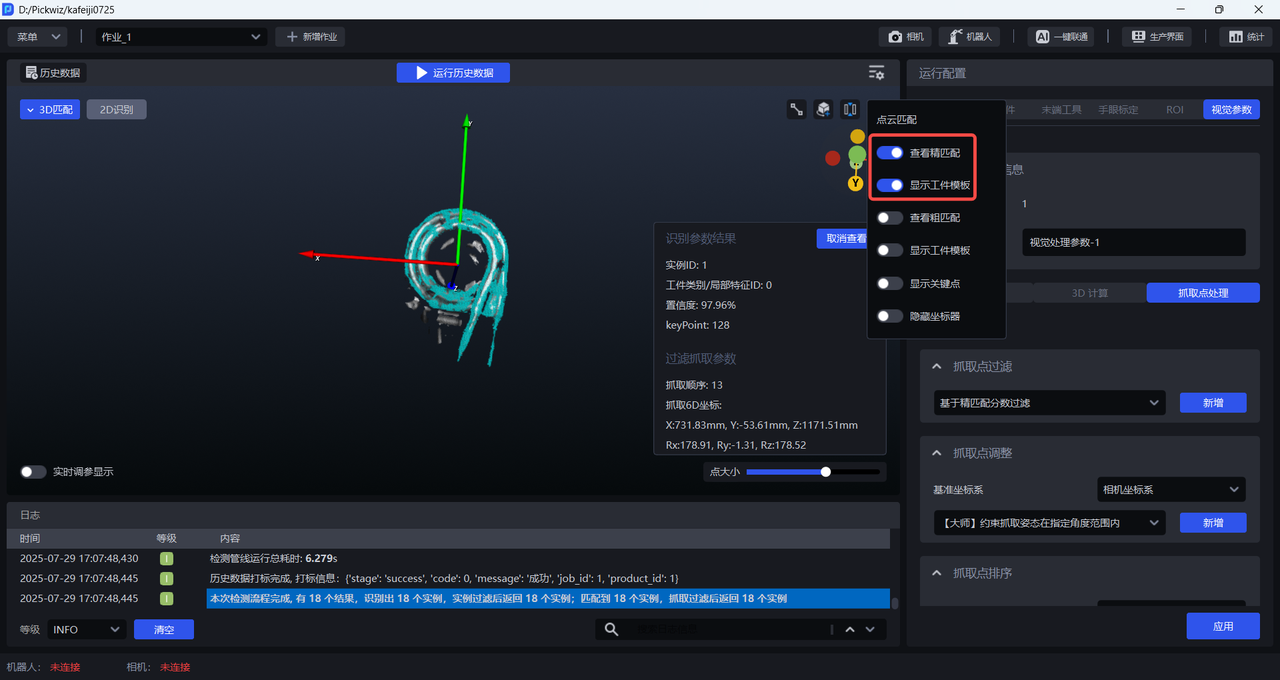
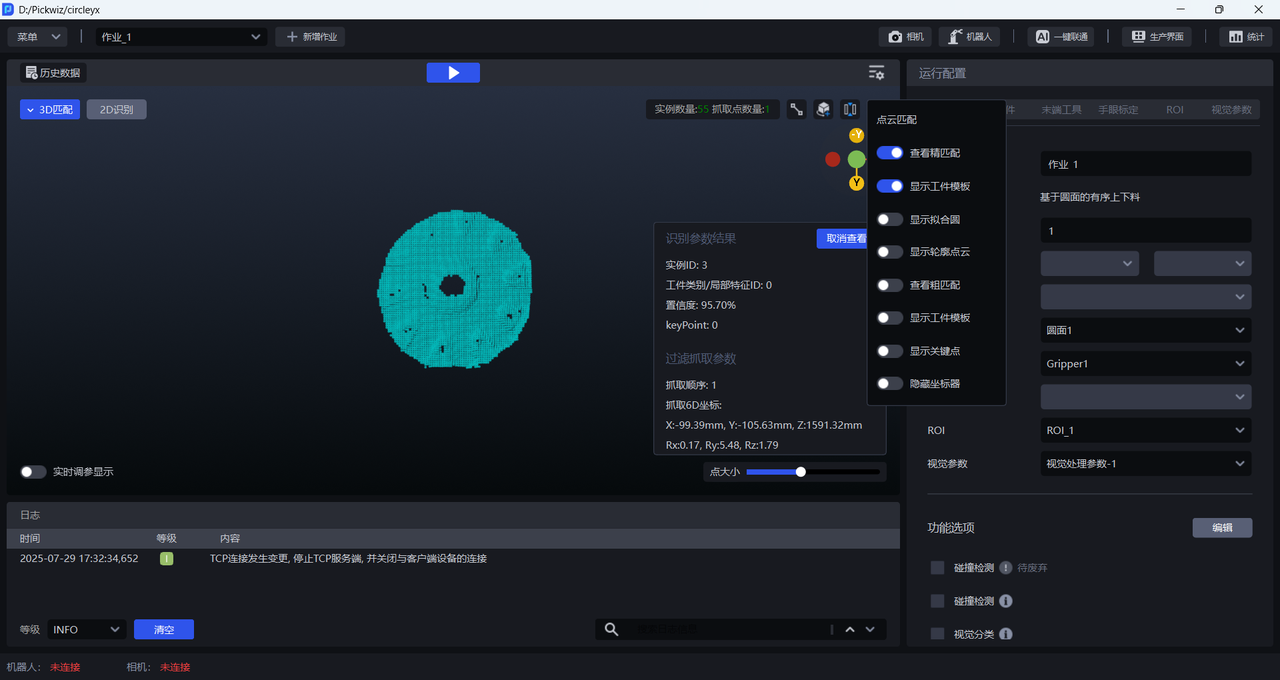
3.2.5 显示工件模板
开启显示工件模板,开启后显示识别出的工件实例的点云模板,如下图所示。
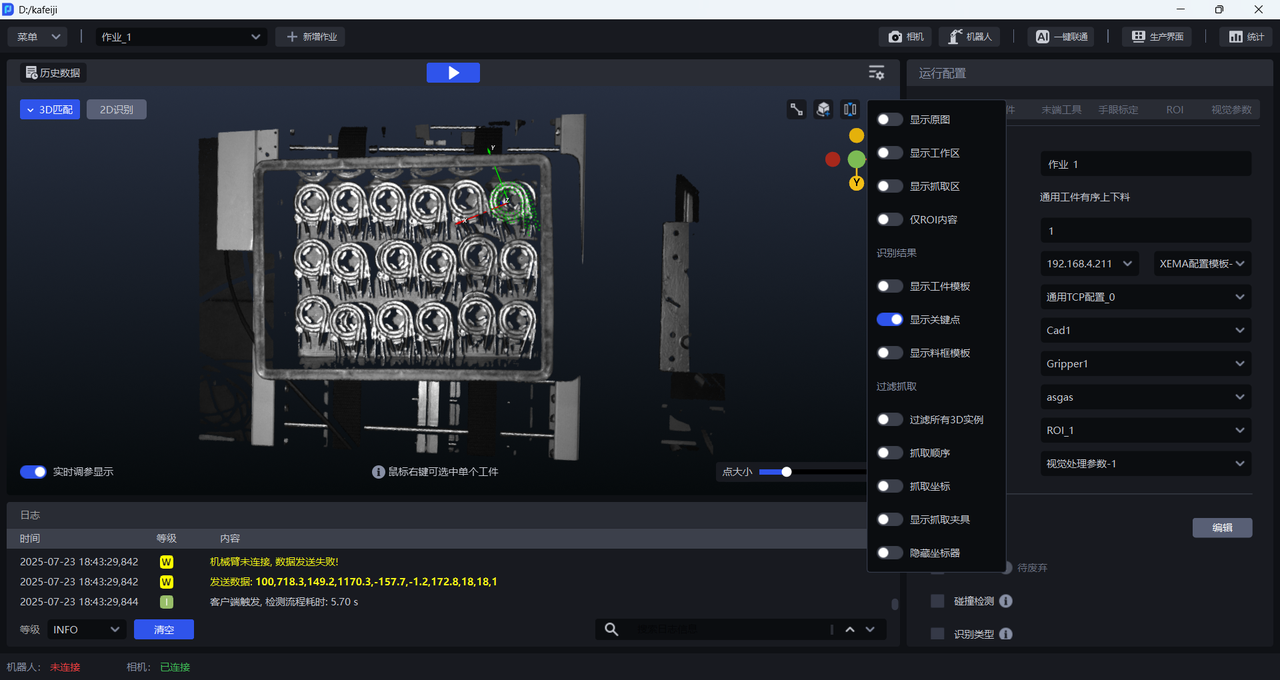
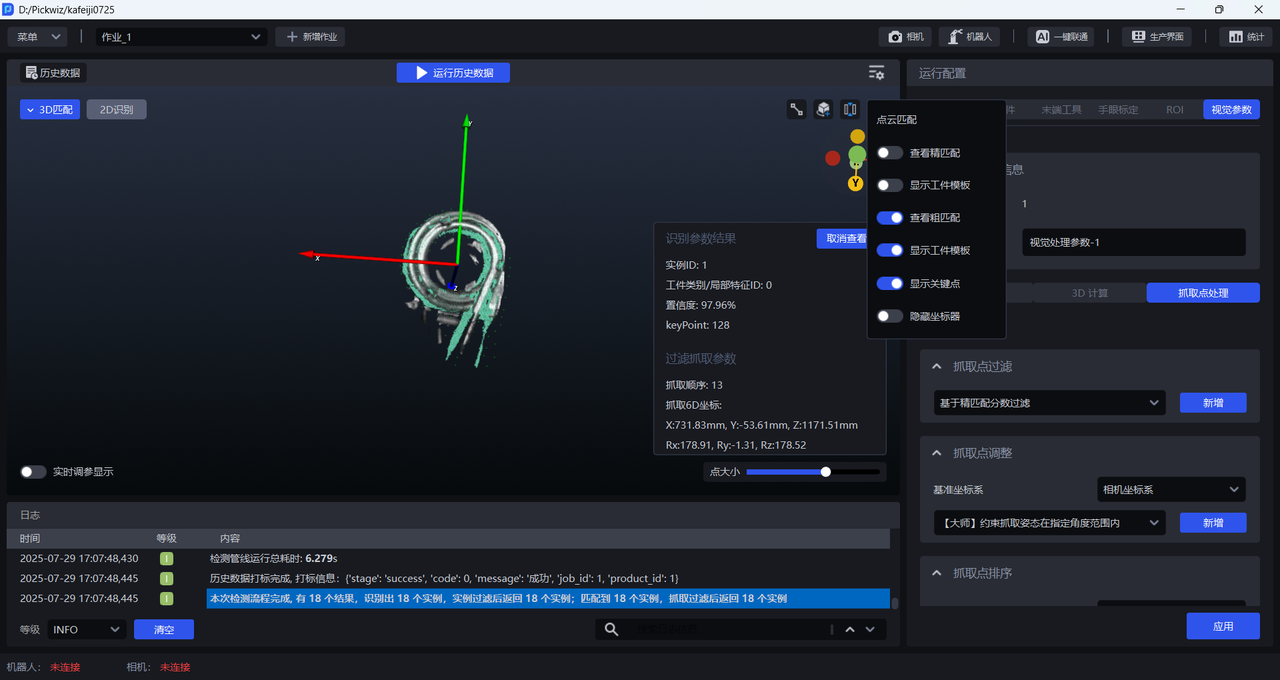
3.2.6 显示关键点
开启显示关键点,开启后显示识别出的工件实例的关键点,如下图所示。
3.2.7 显示料框模板
若场景中有料框,需勾选功能选项中的碰撞检测,用于检测抓取过程中末端工具与料框是否会发生碰撞,具体请参考 碰撞检测使用指南。开启显示料框模板后,可查看四边形拟合得到的料框模板点云,如下图所示。
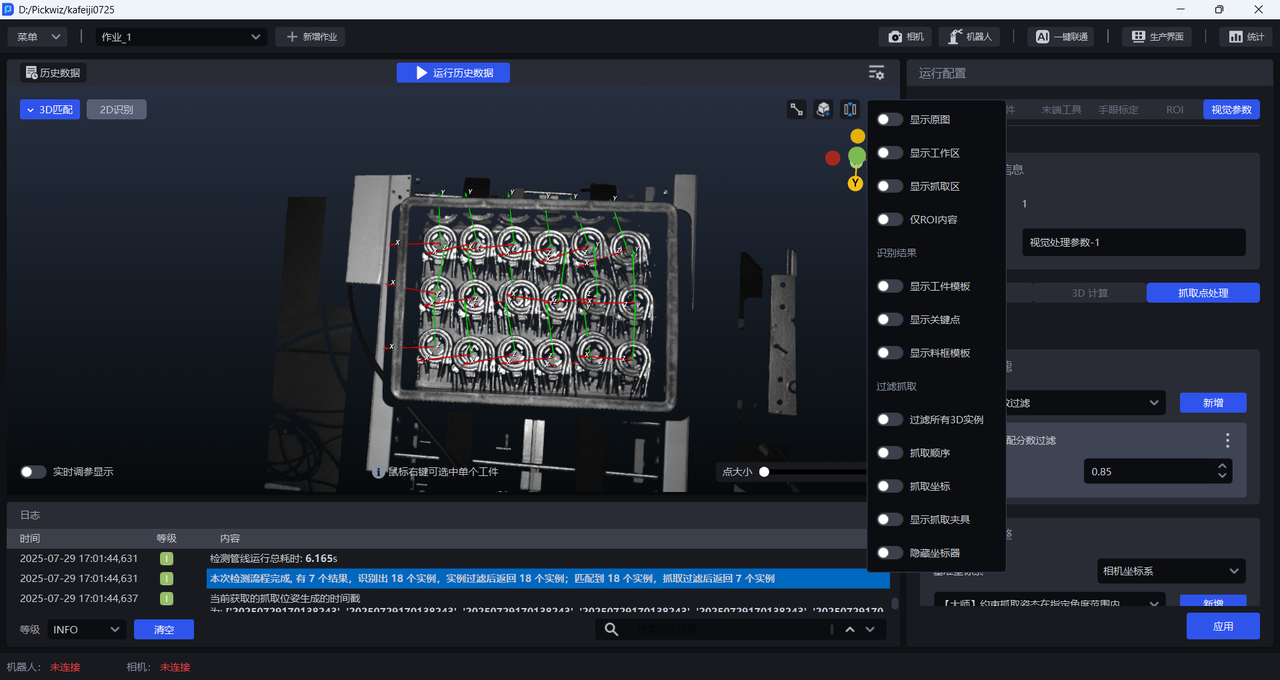
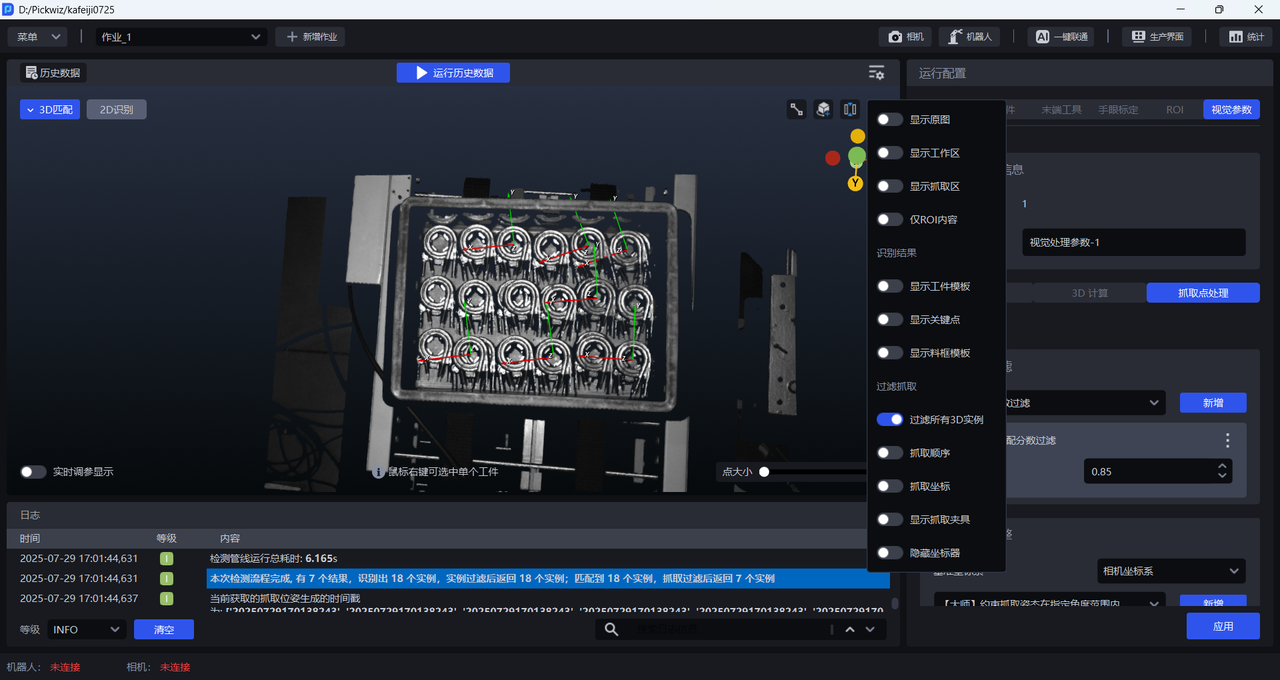
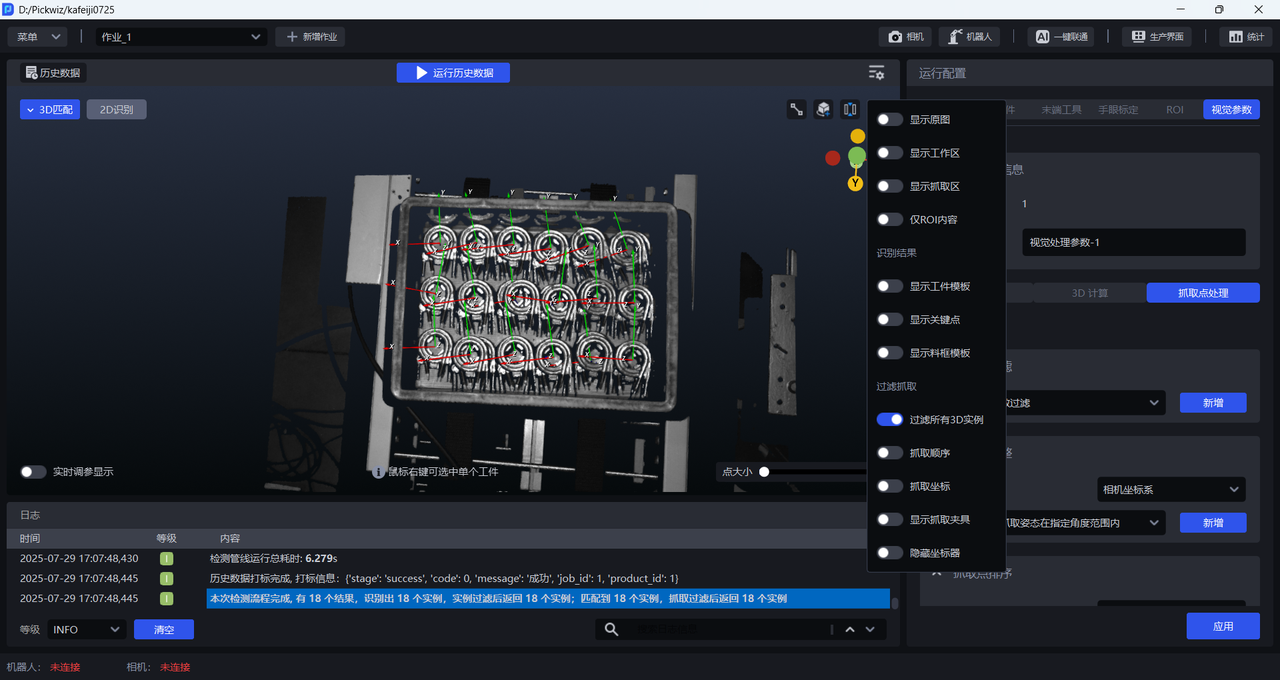
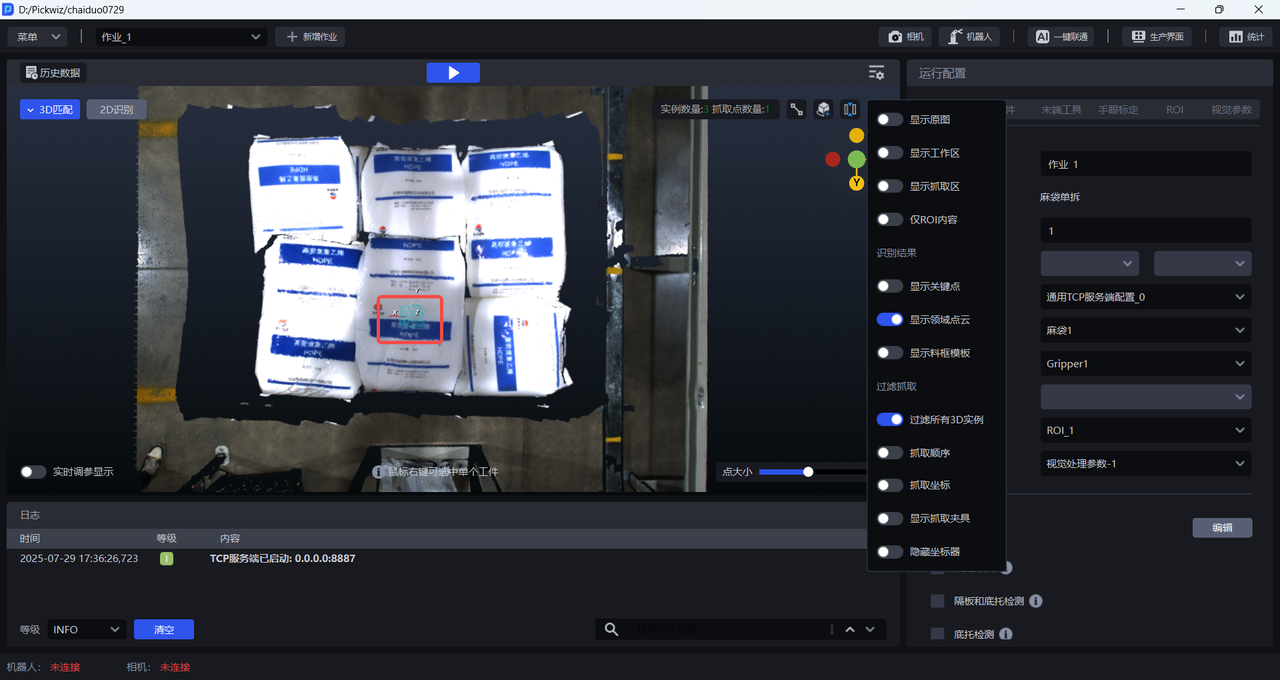
3.2.8 过滤所有3D实例
开启时,显示经过抓取点过滤后输出的抓取点;关闭时,显示3D计算节点输出的抓取点。
如下图所示,在抓取点过滤节点增加了基于精匹配分数过滤函数,分数阈值设置为0.85,因此将输出精匹配分数大于0.85的工件姿态生成的抓取点。
关闭过滤所有3D实例时,显示3D计算节点输出的抓取点,如下图所示,18个工件都生成了抓取点。
开启时,显示经过抓取点过滤后输出的抓取点,如下图所示,抓取点过滤了11个抓取点,只剩下7个抓取点。
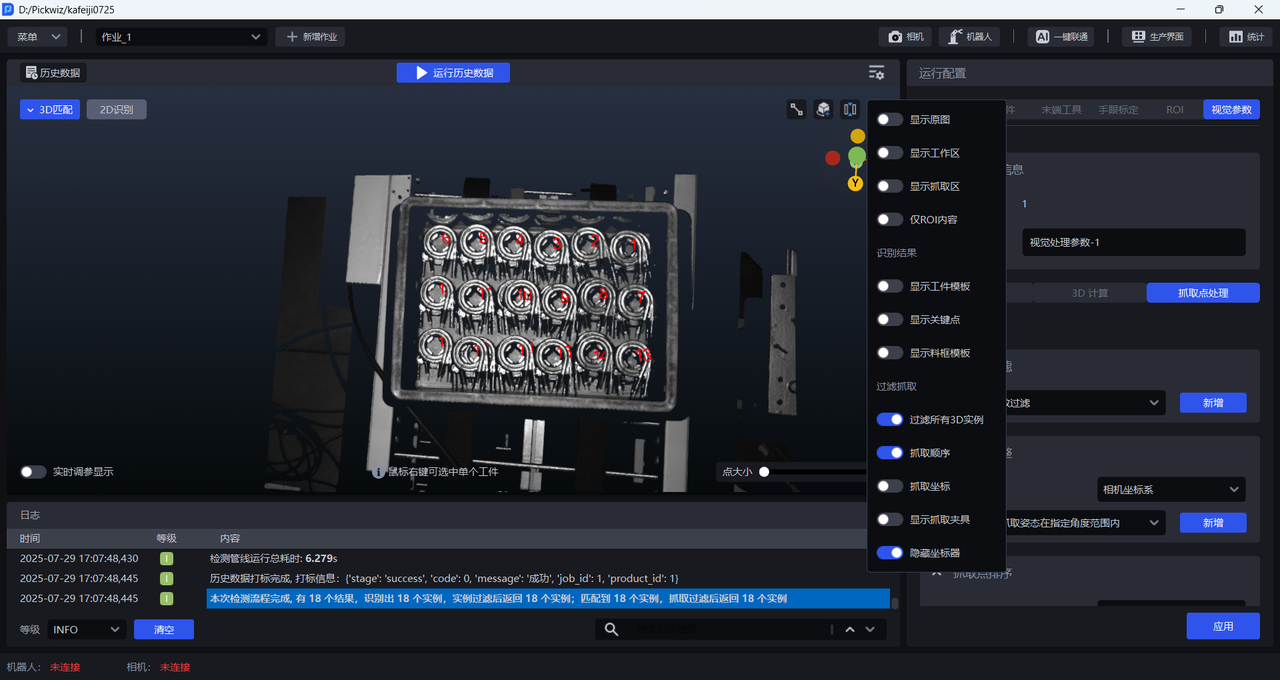
3.2.9 抓取顺序
开启后,显示工件的抓取顺序,如下图所示。
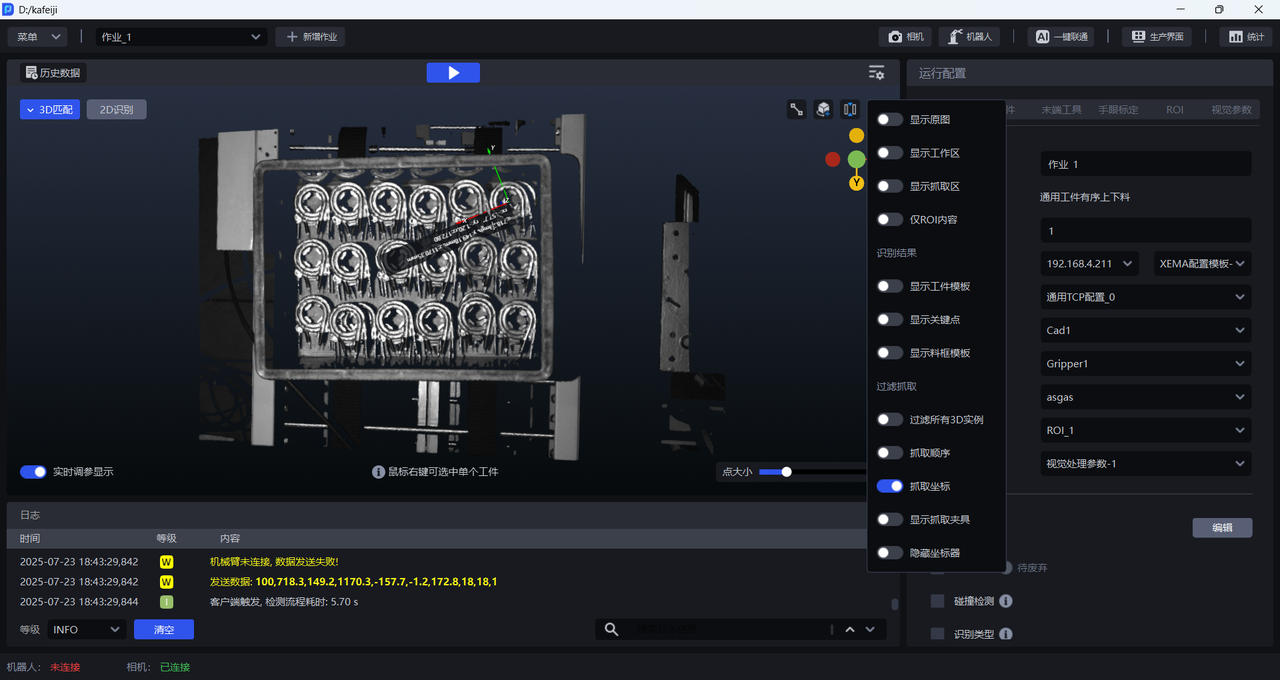
3.2.10 抓取坐标
开启后,显示工件的抓取坐标,如下图所示。
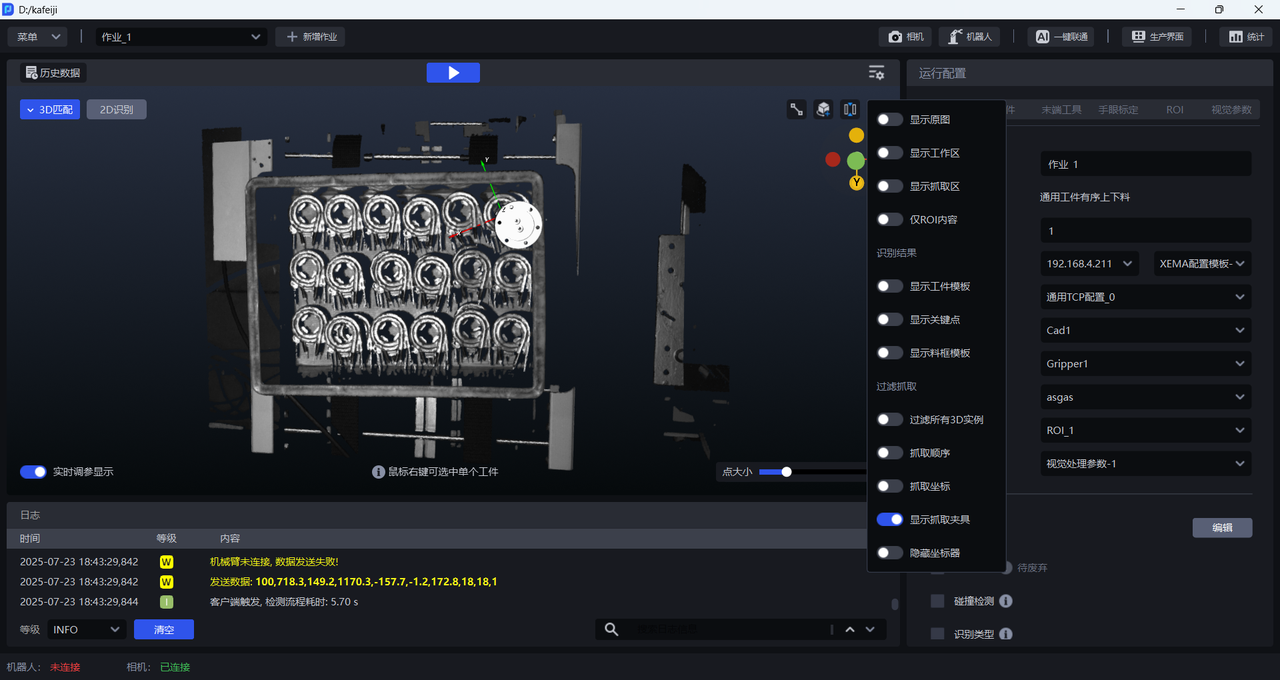
3.2.11 显示抓取夹具
开启后,显示工件的抓取夹具,如下图所示。
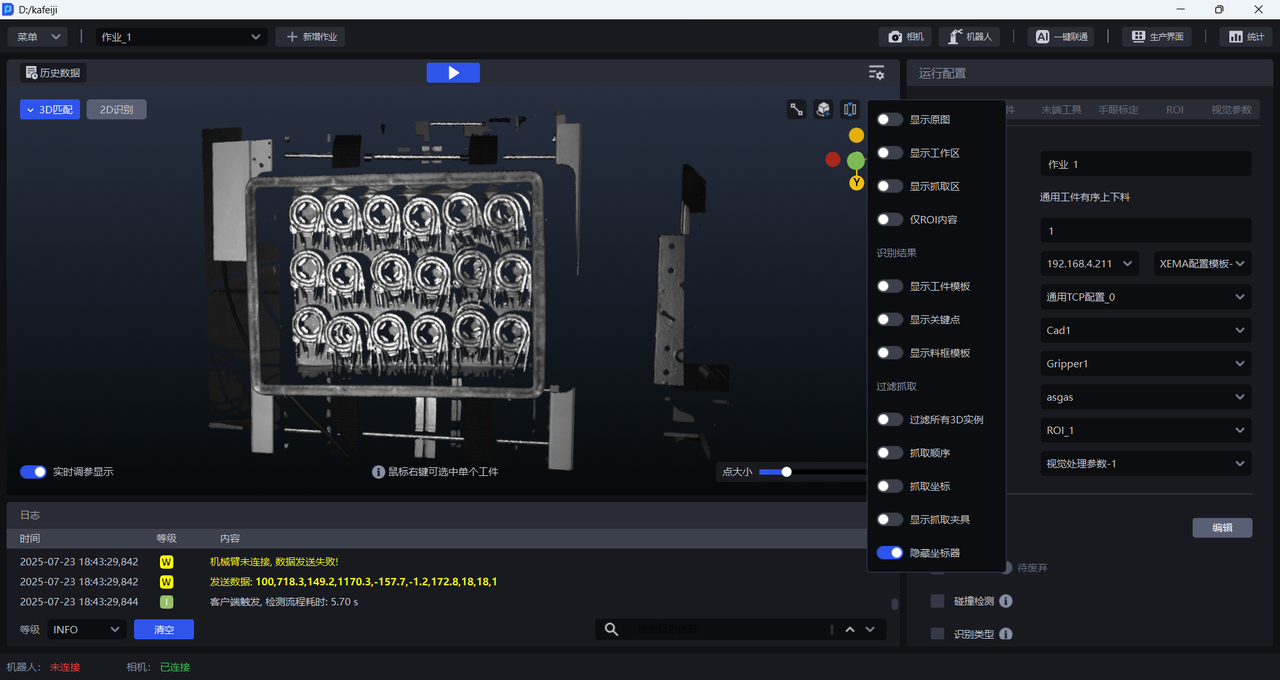
3.2.12 隐藏坐标器
开启后,坐标器将被隐藏;关闭时,显示抓取点的坐标器。
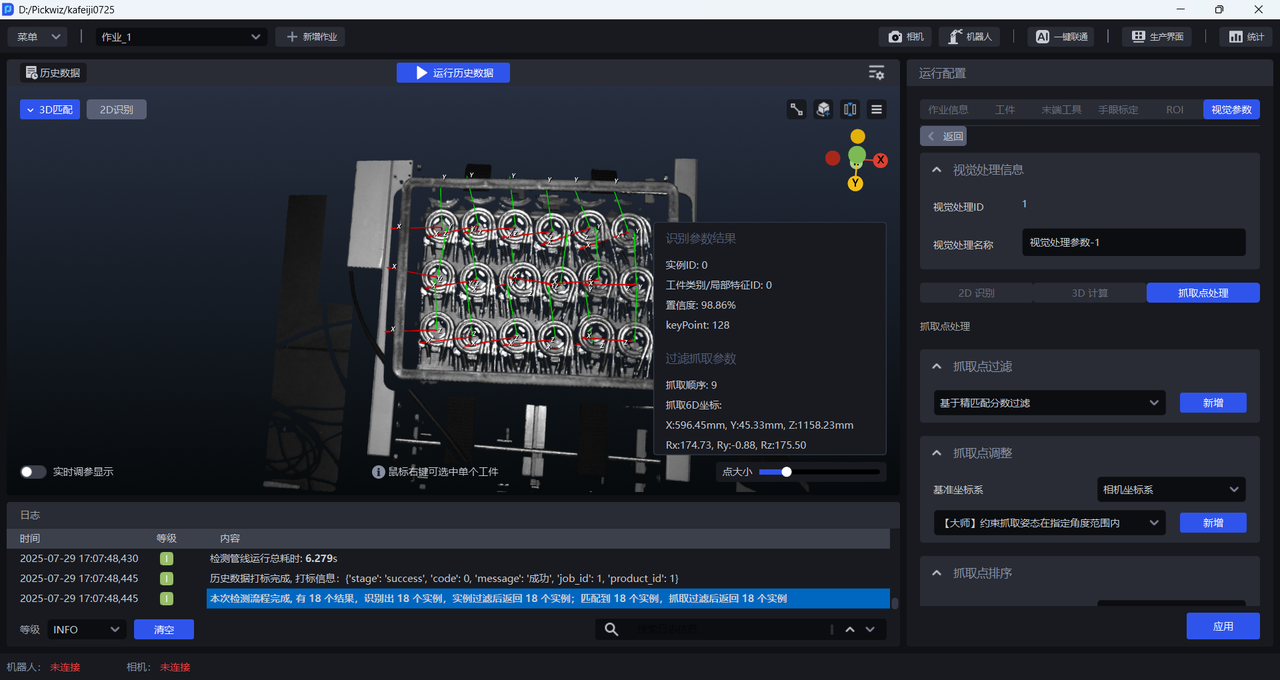
3.2.13 查看单一工件
光标放在不同工件上,可查看每个工件的视觉识别结果,如下图所示。
鼠标右键可选中想要查看的工件,如下图所示。
调整点大小,可调整工件点云的大小,如下图所示。
选中单一工件后,可查看工件的点云模板和精匹配结果。
也可以查看工件的关键点和粗匹配结果。
3.2.14 显示拟合圆
对于圆面工件,开启显示拟合圆可查看拟合的圆形,如下图所示。
3.2.15 显示轮廓点云
对于圆面工件,开启显示轮廓点云可查看圆面工件的轮廓点云,如下图所示。
3.2.16 显示邻域点云
拆垛场景下,在邻域点云范围内计算抓取点。开启时,显示抓取点计算范围内的邻域点云。
4. 示例
过滤置信度较低的工件实例
(1)开启实时调参模式后,调整 “2D识别 - 分数下限阈值” 的数值,系统会响应你的修改,可视化视窗中可实时观察到,置信度0.8以下的实例内过滤。
(2)点击 应用 / 运行 / 运行历史数据 后,可计算全流程,并查看 “2D识别 - 分数下限阈值” 调整后影响的最终结果。